



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
关于无转台挠性陀螺转子控制的寻北方法1.前言对于某些低精度的车载挠性陀螺寻北仪,通常对其成本和体积提出苛刻的要求。例如,两年前14所和207所先后提出希望提供o<0.3°的车载寻北仪。207所对于寻北仪的尺寸提出了具体要求,希望小于150*150(和原来的电子罗盘尺寸相似),单价在7万元可接受。为了最大限度地降低成本和减小尺寸,建议采用无转动机构的一位寻北测量方法并且选用0.05°/h的低成本陀螺和(倾角传感器)加速度表。此时需要解决的主要问题是如何消除陀螺逐次漂移的影响以及如何补偿常值漂移。2.陀螺逐次漂移陀螺逐次漂移实际上是逐次启动的重复性(。)。其测量过程是:在特定环境和无输入速率条件下,同一个陀螺多次启动的输出值的平均值称为常值漂移而其均方差称为“逐次漂移”。每次启动的时间间隔通常是数小时或者1天(确保每次启动是冷态启动),因此也称之为逐日漂移。逐次漂移可以认为是常值漂移的一种。逐次漂移和常值漂移又与陀螺的工作温度有关。目前的磁滞马达挠性陀螺其逐次漂移通常是随机漂移的3〜4倍。比如说,某个陀螺的随机漂移为0.01°/h,则其逐次漂移通常为0.03°/h。如果陀螺的漂移只有随机和常值,其常值是稳定的并且可以准确标定出来则双轴陀螺捷联寻北过程即可采用一位完成。但是由于逐次漂移的存在,通常采用多位寻北消除逐次漂移的影响。逐次漂移形成的原因比较复杂,主要是陀螺马达,特别是采用磁滞材料加工的同步陀螺马达的磁化特性对陀螺转子、力矩器和信号器的影响。美国专利指出:磁滞陀螺马达的转子位臵与与旋转磁场之间的方位(定位)变化是形成逐次漂移的主要原因。如果能准确控制两者之间的定位关系,保持每次启动的转子定位重复性则可消除大部分逐次漂移分量则陀螺的逐次漂移有可能被控制在很小的范围内。原专利未能提及激励电流和磁化强度对于逐次漂移分量的影响问题,即是否还有转子定子的磁化状态的影响?即同时还应该能准确控制每次启动的三相电源的电压状态?另一个提法是所谓再同步方法减小逐次漂移,未见详细资料,估计是多次短促断电-高压启动-低压运行-等待(5s)-采样(15s),以多次启动平均逐次(不是逐日)漂移是否可以大部分消除逐次漂移分量的影响?3转子定位为了实现转子重复定位,美专利提出采用一个专门设计的转子位臵传感器。这个方法可以获得更高的定位精度但是需要修改陀螺结构。能否在不改变现有挠性陀螺结构的条件下近似完成转子的重复定位呢?转子连续定位的寻北方法(2014年4月23日5:49:22)
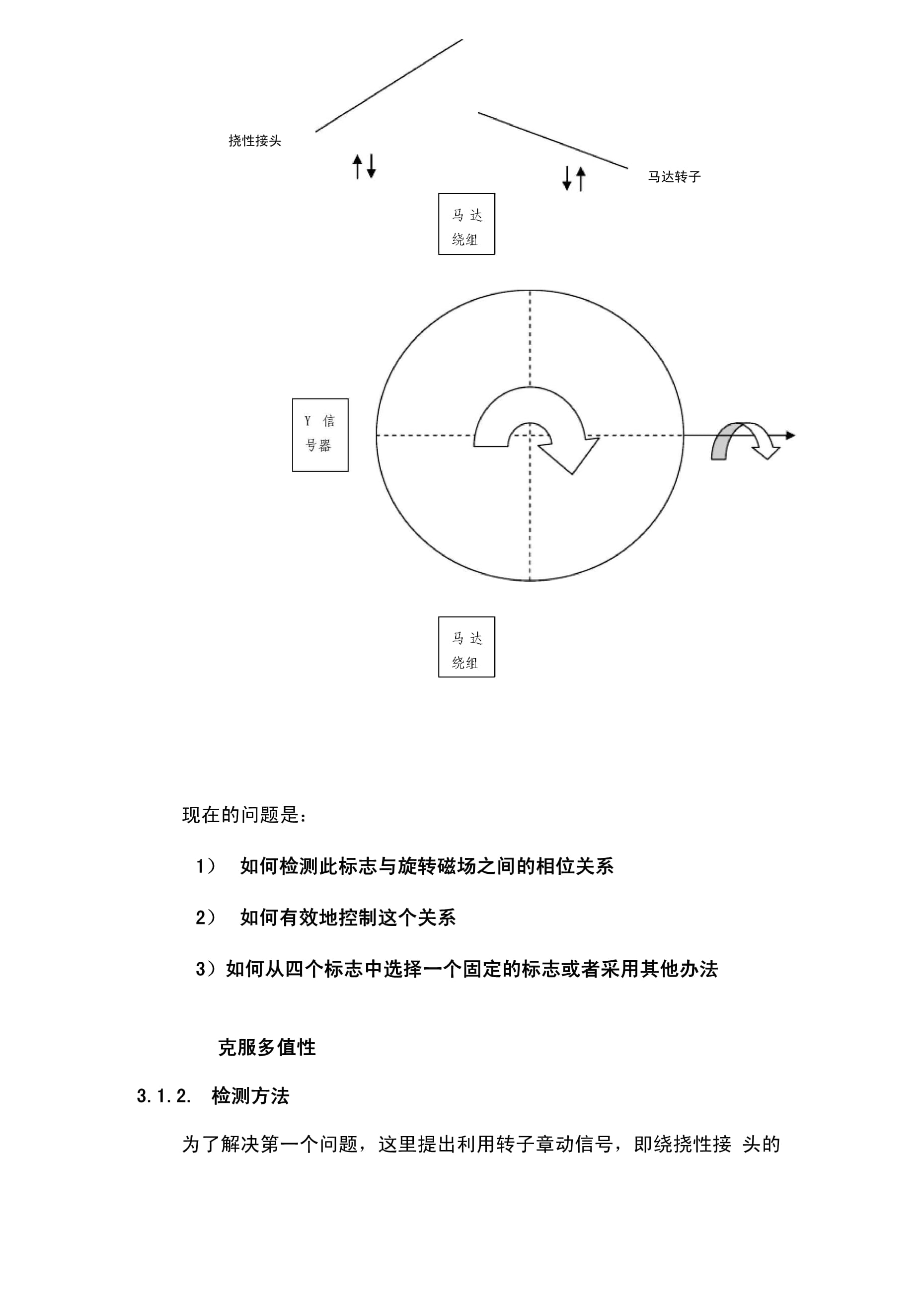
如果采用转子与定子之间连续“平滑”定位控制方法应该比较彻底的解决磁化强度变化带来的新问题。(单独说明)利用章动信号进行转子定位陀螺转子与挠性接头的关系根据挠性陀螺转子结构的分析,转子扭摆轴(X和Y)和陀螺马达转子具有固定的连接关系。如图。这就相当于在转子上设臵的四个标志,X,-X,Y,和-Y,而不是一个标志。能否用其替在转子上设臵的转子位臵传感器?当然,根据专利说明,为了实现转子的定位,只能选用其中的一个。x轴信号器绕组
x轴信号器绕组挠性接头马达转子挠性接头马达转子现在的问题是:1) 如何检测此标志与旋转磁场之间的相位关系2) 如何有效地控制这个关系3)如何从四个标志中选择一个固定的标志或者采用其他办法克服多值性检测方法为了解决第一个问题,这里提出利用转子章动信号,即绕挠性接头的双轴扭摆信号,将挠性接头作为转子位臵的标记-确定转子与三相激励中的A相波形(代表旋转磁场)之间的定位关系之后即可确定转子与旋转磁场的相对关系。根据挠性陀螺原理,其转子与马达定子之间的运动关系可以表示为:Y=acos0+Psin0©=-asin0+Pcos0由于章动角速度是马达转动角速度的二倍以上两式可写成Y=acos(2Qt+p)+psin(2Qt+p)©=—asin(2Qt+q)+Bcos(2Qt+q)陀螺马达转动角速度转子和定子之间的初始相位角也即0的初始相位角转子和定子之间的相对转角即马达自传的相对转角X敏感轴输出的偏转角Y敏感轴输出的偏转角X扭杆的扭转角Y扭杆的扭转角实际上美国专利指出的是,如果能使每次启动时申具有足够的重复精度则可以消除大部分逐次漂移。举例说,在马达定子A,B,C三个绕组中,假设我们选定A相作为“基相”转子定位的目的是保证A相中的正弦电压为0时挠性接头的X扭摆轴正好平行于基相的磁力轴线M。关于多零位问题由于无法从上述四个定位信号中准确重复地选择其中之一,也即无法解决多零位问题。但是,如果采用四个位臵上进行采样以代替每一个确定的位臵,也就相当于选取四个确定的位臵而不是一个进行采样。是否可能获得更好的结果?3.3.浮动零位的定位方法3.3.1.原理说明由于从章动信号中提取扭摆信号的过程比较复杂因此进一步设想,采用浮动零位的四位定位方法代替上述固定的四定位方法。即随机确定四个正交位臵的初始限位进行寻北测量。此时不再需要章动信号搜索扭摆零位。将转子磁化影响分解为X,Y敏感轴分量。如果能使任意初始磁化方向上开始的磁化影响在X,Y方向上的采样之和为一个常数则可以消除逐次漂移。假设H为在选定确定的定位(°二0)方法时常值磁场干扰分量,0其逐次项为H,此时在X轴四个正交位置上的分量SH二H+HcosaX10Z+900)H二H+HcosVX20(L+1800)H二H+HcostX30(,+2700)H二H+HcosX40H=(H+H+H+H)X1234H=4HX0可见,如果确认逐次漂移源自转子定位重复性造成的磁场干扰的重复性,则上述设想应该是合理的。因为无论X为何值,磁化影响在X,Y上的分量总是为零。3.3.2.浮动零位的定位控制既然是浮动零位,则第一个转子位臵是随机选定的。而第二,三四为构成连续的正交定位即可。
采用突然跳相来改变任意起始点的四位寻北突然改变马达三相电源波形的相位,超前或者滞后90度。这样可以一次到位。每次移相方向相同。但是由于重新定位时可能出现相对磁化状态的变化,因此可能需要三相驱动电流重复性的控制,例如重新启动高低压转换。这一点美国专利没有进一步的说明而只强调转子的位臵重复性。这就提出,两位寻北还是四位寻北的问题。似乎四位寻北最为合理?两次,在a+0°和a+180。的转子相位上进行相等时间的积分测量。假设转子磁化强度不变,但是必须注意到,每次重新定位会造成三相电流的改变,因此在每次重新定位之后应该通过三相调压使三相激励电流保持不变!以便使转子磁滞材料的磁化状态重复。或者在每次变位完成之后再重复一次瞬时高低压跳变动作以保证马达转子的磁化状态的重复性。4关于转子位臵测量和定位控制初步试验转子位臵测量在徐飙、邢华良和孙文正的努力之下于08.2.进行了陀螺马达转子与A相之间的定位控制的初步试验。基本作法是:从(X)力反馈回路的鉴相波形中取差200Hz的转子章动扭摆信号经过高Q带通和整型变成方波信号与A相方波进行相位比较。此相位角代表陀螺的两个扭摆轴形成的四个标志中的某一个与定子A相磁极之间的相位。转子位的定位控制为了达到控制两个信号之间相位角的目的,可以可以两个方法:a)以短促的马达三相断电,例如短促切断陀螺马达驱动桥的的供电,使转子暂时失去驱动力而惯性滑行。切断陀螺马达驱动桥的的供电意味着此时三相旋转磁场仍然按照原来的速度运行。由于轴承的摩擦和风阻的作用,转子减慢转速,转子与旋转磁场之间的相位角出现滞后,即改变了两者的相对关系。当再次接通三相电源时,马达的磁滞转子重新磁化并且在新的相位关系进入同步状态。章动衰减问题由于章动衰减很快,造成鉴相信号过于微弱,为此转子定位最好在马达启动过程中完成。但是当第二次定位时由于章动已经被衰减,为了凸现上述转子摆动信号,需要对转子进行刺激。转子定位误差与逐次漂移的关系假设单点重复定位存在定位误差
如果转子定位关系造成逐次漂移量3与磁场方向有关则转子重复定位的误N差A0与3 3=3(1+sinA0)????NN N0当转子重复定位误差为50时,造成的逐次漂移为A相400Hz方波前沿和X轴章动200Hz倍频进行脉冲鉴相。以鉴相输出直流分量作为控制陀螺马达驱动电源短促断电的信号。为了克服多值性,必须同时参考Y轴章动方波状态作为判断条件。在“与”的后沿时刻判断,三个红色脉冲同时出现是转子定位完成的标志。四位寻北
精度分析主要误差源a)相位晃动误差A申(相位噪声),b) 章动(正弦)波形幅值U波动(幅值噪声),mc) 比较器灵敏度和滞后转子定位精度与章动(正弦)波形幅值U以及过零比较器灵敏度AU有关。m相位晃动误差A申就是转子相对旋转磁场的定位误差角U二UsinGt丿mAU二Usin(A申)m
定位误差与逐次漂移的关系。也应该是正弦关系。如果不计误差的正负号,如果最大定位误差角为90时对应于最大逐次漂移,最小逐次漂移对必然应于0这里存在两个问题:1)三相马达的磁极对数P为2,为此出现多个定位关系的问题。相频率为400Hz,在马达转速为200Hz,转子扭摆章动频率也应该是200Hz。2) 陀螺马达的转子并非具有固定磁极的永磁体,其转子的磁滞材料的磁化方向是随机的(可能与转子上次停止位臵和三相电源上电情况有关。)3) 补充具有分立磁钢的无刷马达是否更有利于转子定位控制?4) 关于零位的判断0°还是180°为了解决第一个问题,提出转子的两次倒向定位控制,基本解决的办法是进行二次定位(正反0°,180°)。为了解决第二个问题
8.关于再同步控制为了消除(减小)陀螺(特别是采用磁滞陀螺马达的挠性陀螺)的逐次漂移,国外采用所谓再同步控制,但是不知道具体的实施方法也不知道国内是否有人做过研究。根据逐次漂移的形成过程,即一次启动断电之后等待一段时间再次启动则陀螺的常值漂移将与前次不同。所谓再同步可能是在陀螺马达同步运转之后,每隔一段时间突然将三相电源暂时断电,陀螺马达进入减速滑行,然后再接通,使陀螺马达转子与定子之间的相对位臵不断的重新定位,同时也不断改变陀螺马达转子定子的磁化状态。此时陀螺马达实际上工作在不断的重新启动的状态下(但不是冷态启动),而这种不断重新启动使转子定子的(启动)相对位臵以随机分布的状态重新定位。当再同步次数足够多时即有可消除(至少是减小了)逐次漂移的影响。当然,也可以采用多次重新启动的方法,但是由于滑行时间过长造成寻北时间加长。考虑到磁滞陀螺马达在采用高压启动-低压运行的激励方法时,能使陀螺马达的激励电流突然减小到只是额定电压下启动时的1/2,可见这种高低压转换过程同样改变了磁滞马达(转子定子)的磁化状态(但是可能没有改变转子与定子之间的相对位臵关系)。因此如果能在瞬时断电的基础上在增加瞬时高压启动的控制效果则可能更为有利。为了利用再同步控制减小逐次漂移对捷联寻北的影响可能需要通过大量试验寻找合理的断电时间和间隔或者是合理的瞬时高压激励时间和间隔以及高压幅度值。4马达转子控制方法4.1磁滞同步马达转子控制方法由于磁滞马达转子与永磁转子不同,没有固定的磁极,磁化之后的磁化“磁极”是随机形成的,因此必须完成四次转子定位才能平均转子的磁化影响。2007年10月8日试验结果初步证明设想的原理是正确的。带通的Q值大于10,200Hz的相位晃动可能在±20°,希望定位误差在±5°之内。因此希望Q值进一步加大。移动转子,直到三相准方波的A相上沿过零时刻与转子信号(高Q值带通输出)的上沿过零信号对齐。此后再完成一次高压再启动?章动动是一种干扰运动,在力反馈回路闭合之后可能很快衰减,造成相位测量的困难,为此可以考虑采用在力反馈回路闭合之前完成转子相位控制,或者采用个力矩器进入刺激使200Hz(磁极对数为2)的相位晃动加大。(2007年11月15日)重新调整三相电流是必要的!永磁马达的转子控制与磁滞马达不同,永磁马达逐次启动的磁化状态相对稳定,绕组的感抗也相对稳定。如果能使转子重新定位是否也有助于减少逐次漂移?如果考虑使转子在四个正交位臵上进行寻北测量,进一步平均逐次项。此时需要从转子X,Y轴同时取出位置信号与A项方波比对,寻找转子的定位点。2007年10月19日)上述处理过程是否需要高压再启动?c) 一次变速再同步目前02陀螺的方波方波驱动电路具有软件变速功能,即从额定转速变为低速用以完成制动或者降低动量矩完成快速制动控制。实际上,在变速过程中陀螺马达有制动过程并且改变了转子定子之间的相对关系。双轴平台试验表明,上述从变速到再同步过程陀螺的常值漂移不能维持不变,可见一位寻北过程中如果采用变速-再同步控制进行多次寻北测量则可能有助于凸现逐次漂移然后通过多次寻北测量进行平均计算。具体做法是,第一次同步并且等待10s之后进行多段寻北测量,获得第一个寻北测量值°a1然后陀螺马达变速,从额定转速Q变为0-AQ并且持续0.5s再返回到额定转速Q,等待3s完成“变速-再同步”过程。进行第二次寻北测量,获得第二个寻北测量值a2o重复上述过程直到总的寻北时间接近限定的寻北时间。d) 二次变速再同步如果将上述一次(减速)变速改为一次减速变速加上一次加速变速之后返回再同步,即成为二次再同步。最后取几个寻北测量值的平均值为最终寻北结果。上述方法均不属于冷态再启动,因此不可能完全凸现陀螺的逐次漂移特性而只能期望尽可能逼近。三相电源的电压控制是容易的。
考虑到陀螺信号器输出的载波信号受到转子转动的调制,既使不能准确的重新定位但是可以使转子和定子转角不断改变相对位臵,如果这种相对位臵变化是均匀的则可以进行平均。关于直流无刷马达,由于其转子和定子转角的位臵是可测的,只是无法判断处于那个象限。如果能在寻北测量过程中使四倍频脉冲位臵等速错位晃动平均效应。?转子断续错位如果能多次(n次)改变转子与旋转磁场之间的相对位置,每次改变360°/n,改变之后进行再同步,并且进行n>4次寻北测量采样。6.分段积分测量?为了尽可能减小时漂的影响,建议在进行一位寻北时采用分段(等分)积分方测量方法。两段积分消除等速漂移的影响如果采用等分两段积分则平均测量值有:第一段(1)2)7+2ki(1)2)第二段①=丄卩2T①dt+J2Tktdt2TLT Ti3=®+kT2i® =被测地速+常值漂移+随机漂移k1 等速时漂系数T 分段积分的时间段计算无等速时漂影响的速率分量(3^ =丄(3^ =丄21223kTI21丿=e®=J_(3厉一厉) (3)212可见,虽然一位寻北不可能消除陀螺的常值漂移(更确切地说是逐次漂移)但是采用分段(两段)积分可以补偿一次(等速)时漂项。如果采用三段积分则可消除二次时漂。
9一位寻北水平标定和寻北计算方法9.1.一位寻北的水平标定对于理想陀螺,假设陀螺无漂移,XY轴刻度系数相等并且正交(即相互垂直并且垂直安装基面),则双轴水平寻北测量无需进行多位寻北,也无需进行力矩器刻度系数标定。一位寻北测量,获得X,Y两个采值即可计算北向值:6)4)二arctg(y)4)X此时标定目的是要测定实际陀螺的常值漂移和两个轴的力矩器系数(由于两者均为温度的函数,因此还必须标定其温度系数)。假设K,K分别为XY两个刻度系数(假设两轴正交),常值漂移为I和XY X0I。这里I值实际上是VFC输出的脉冲积分数。Y0注意!每个采样积分时间必须是统一的。如果为了提高标定精度而加大了积分时间(例如加长2倍)则必须将其折算为统一的积分时间(例如再除以2)之后代入公式进行计算。加表采样的处理过程相同5)K(I-15)a=arctg Y0-ANXXX0或者a=arctgKN(一(i-a=arctgKN Y0Aia-1))XX0由于K二K,所以K二1XY在采用两段积分(消除时漂)时北向输出为-(3I-1-21)a=arctg耳N6)2 a=arctg耳N6)(3I-1 -21)X1 X2 X0由于存在常值漂移I和I所以通常在多齿转台上采用多位标定。此外由于X0Y0陀螺的两个轴的刻度系数存在差异因此必须进行刻度系数标定(如果两个轴的特性具有良好的相关性则实际上只需标定上述刻度系数的比值n)。K为了简单,i和i的标定可以单独进行。具体方法是:X0 Y0在水平转台上使陀螺X,Y轴大致指向东南和西北(45°方位角),完成如下三位寻北测量。•启动陀螺――•同步之后等待1分钟--•进行X,Y双轴采样(I和I),采样时间是正常寻北采样时间的1〜3倍一一X1Y1
•转台转动180°,等待5s(母次测量的转动和等待时间相同) 进行X,Y双轴采样(I和I)。采样时间一样X2 Y2•转台返回180°,等待5s进行X,Y双轴采样(I和I)。采样时间一样X3 Y3•停机等待30〜60分钟之后重复上述测量;按下式计算X轴的平均电流为I=丄G+1-21丿TOC\o"1-5"\h\zMX4X3X1 2XY轴的平均电流为I=1(I+1-21丿MY4Y3 Y1 Y2为了标定I和I值,需要在几个已知方位差的位置上进行寻北测量(标X0 Y0定)。即依靠精密转台在水平状态下测量。例如分别在转台读数为0°、90°、180°和270°进行四次寻北。获得3(! —I丿-G—I丿tga二K30Y11_/Y0丿_QY12 Y0丿 (20)X11 X0 X12 X0I为Y轴第一位置(即假设的0°)的第一段积分值Y11I为Y轴第一位置(即假设的0°)的第二段积分值Y12I为X轴第一位置(即假设的0°)的第一段积分值X11,I 为X,Y轴的常值漂移(欲标定值)X0Y0+90oA (3I -1 -21)+90oA (3I -1 -21)尸K_Y21 Y22 Y0-^n 乜1 -1 -2I丿X21 X22 X0+180oN)=K&J=K_Y31N (3IX31-2I) Y0-^-21丿X32X0Y32+270oN21)2223)为Y轴第四位臵(即假设的270°)的第二段积分值Y42以下两个方程可计算出常值漂移I和IX0 Y0(20)=(22)令:37X11(3It37YUX11X12Y42X12X1-27Y0)(3IX0X31Y32X3237 —7=令:37X11(3It37YUX11X12Y42X12X1-27Y0)(3IX0X31Y32X3237 —7=7Y11 Y12Y137 —7=7Y31 Y32Y2则(24)变为(J-27)(7 —27)37X31X32X2GY1 Y0\= Y2 Y0\-27) \7 -27)X1 X0 X2 X0-27Y0X024)7 — 277 —27 7 +47 7 =7 7 —277 —277 + 47 7Y1 X2Y1 X0 Y0X2X0 Y0 X1 Y2 X1 Y0 Y2X0X0Y07 7 — 277 —27 7 =7 7 —27 7 —277Y1X2Y1X0 Y0X2X1Y2X1Y0Y2X07 7 — 77 +=27 7 —27 7 —27 7+277TOC\o"1-5"\h\zY1 X2 X1 Y2 Y1 X0 Y2 X0 X1 Y0X2 Y077 —77二2(7 —7)7 —2(7 —7 )7Y1 X2 X1 Y2 Y1 Y2 X0 X1 X2 Y0(37 —7 —27 )3/ —7 —27 =(37 —7 —27)(37 —7 —27 )Y11 Y12 Y0 X31 X32X0 X11 X12X0 Y31 Y32 Y0(37 —7 —27 )Y31 Y32 Y0令37 —7=7Y11 Y12 YY137 —7 =7X31 X32XX337 —7 =7X11 X12 XX137 —7 37 —7 =7Y31 Y32 YY3Y31 Y32 YY3(21)=(23)TOC\o"1-5"\h\z(37 —7 —27 )_(37 —7 —27 )Y21 Y22 = Y41 Y42 Y0-^(37 —7 —27 ) (37 —7 —27 )X21X22X0 X41 X42X0K值的直接标定
此时,在水平多齿转台上选择任意方位角(称为0°)进行(三位)寻北测量,得到I,I;转台转动90。等待10s进行第二次(三位)寻北测量得到TOC\o"1-5"\h\zX00 Y00I,I。代入下式(I,I是前面常值漂移标定的结果)。九是标定地点X900 Y900 X0Y0 0的精确纬度值。(I -1)+C-1)=(K®cos九}X00 X0 X900 X0 Xe0石-1)+6-1)X00 X0 X900 X0—K①cos九 Xe0将O与K合并为KeX X0育"""-I)2+(i -I)K—• X00 X0 X900 X0X0 cos九0K的标定计算是相同的。Y0由于实际使用是只需要占__-TY0占__-TY00Y0K耳——Y0=KX0■(i -1X00 X0-1丿Y900 Y0①cos九+G—i X900 X0①cos九e0最后有K (I -I )2+(I -I )2耳=Y0—Y00Y0 Y900Y0\K (I -I )2+(I -I )2X0 X00X0 X900X0这是一个近似于1的数值。标定耳值有助于提高全方位寻北精度。考虑到陀螺两轴的不正交上述分析是在假设陀螺的两个轴之间为理想的垂直关系。实际上由于陀螺的制造误差及环境变化,老化等因素的影响使两个轴之间存在垂直误差e,这里暂且认为是常值。此时(1)式需要进行修改。当然
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 2026浙江嘉兴市嘉善县人才发展有限公司招聘1人笔试参考题库及答案详解
- 成都市新津岷江生态环境产业发展集团有限公司2026年公开招聘工作人员的笔试参考题库及答案详解
- 2026年甘肃省临夏州临夏市人力资源和社会保障局招聘城镇公益性岗位人员的笔试模拟试题及答案详解
- 2026年滁州天长市镇街应急消防综合工作站公开招聘员额制安全监管员32名笔试模拟试题及答案详解
- 2026四川宜宾南溪区农业农村领域高校毕业生就业岗位招聘15人(第二批)笔试备考题库及答案详解
- 2026黑龙江哈工大航天学院复合材料与结构研究所招聘笔试备考试题及答案详解
- 2026年柳河县域外事业单位人才回引笔试备考试题及答案详解
- 2026江西长旅数智科技有限公司面向社会招聘3人笔试备考题库及答案详解
- 上高县2026年公开选调城区学校教师【137人】笔试模拟试题及答案详解
- 2026中石安环公司第二期暑期校园实习生招募笔试备考题库及答案详解
- 党建引领 五育并举 推动学校内涵式发展
- 《行政组织学》题集
- 2023-2024学年人教版七年级数学下册 相交线与平行线 期末检测卷
- DL∕T 5342-2018 110kV~750kV架空输电线路铁塔组立施工工艺导则
- 遗传学教案设计
- 养老院建筑设计说明书
- 《失眠的药物治疗》课件
- 2023年数学竞赛AMC8试卷(含答案)
- 会议服务培训标准与流程
- 肌少症-教学讲解课件
- 六年级数学上册奥数题-分数乘法(附答案)
评论
0/150
提交评论