



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、实用文档第一章课后习题:3、说明工业机器人的根本组成及各局部之间的关系.答:工业机器人由三大局部六个子系统组成.三大局部是机械部 分、传感局部和限制局部.六个子系统是驱动系统、机械结构系 统、感受系统、机器人一环境交互系统、人机交互系统和限制系 统.各局部之间的关系可由以下图说明:4、简述工业机器人各参数的定义:自由度、重复定位精度、工 作围、工作速度、承载水平.答:自由度是指机器人所具有的独立坐标轴运动的数目,不应包 括手爪末端操作器的开合自由度.重复定位精度是指机器人重复定位其手部于同一目标位置的能 力,可以用标准偏差这个统计量来表示,它是衡量一列误差值 的密集度即重复度.工作围是指机器人
2、手臂末端或手腕中央所能到达的所有点的集 合,也叫工作区域.工作速度一般指工作时的最大稳定速度.承载水平是指机器人在工作围的任何位姿上所能承受的最大质 量.承载水平不仅指负载,而且还包括了机器人末端操作器的质 量.第二章课后习题:1、答:工业上的机器人的手一般称之为末端操作器,它是机器人直 接用于抓取和握紧吸附专用工具如喷枪、扳手、焊具、喷 头等进行操作的部件.具有模仿人手动作的功能,并安装于机 器人手臂的前端.大致可分为以下几类:1夹钳式取料手;2 吸附式取料手;3专用操作器及转换器;4仿生多指灵巧手.4、答:R关节是一种翻转Roll关节.B关节是一种折曲Bend关 节.Y关节是一种偏转Yaw
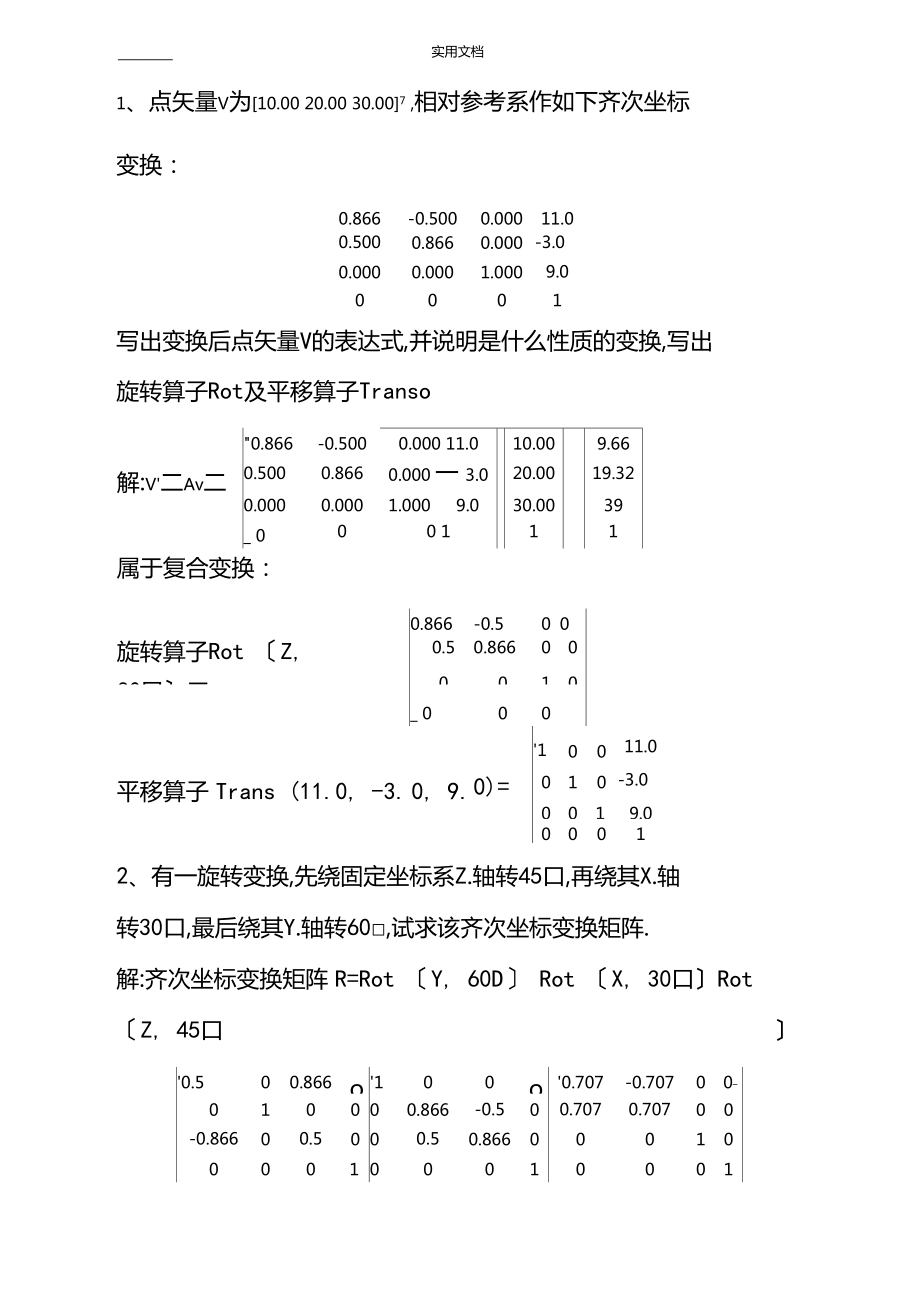
3、关节.具有俯仰、偏转和翻转运动, 即RPY运动.5、答:行走机构分为固定轨迹式和无固定轨迹式.无固定轨迹式又 分为与地面连续接触包括轮式和履带式和与地面间断接触步 行式.轮式在平地上行驶比拟方便,履带式可以在泥泞道路上 和沙漠中行驶.步行式有很大的适应性,尤其在有障碍物的通 道如管道、台阶或楼梯上或很难接近的工作场地更有优越性.第三章课后习题:1、点矢量V为10.00 20.00 30.007 ,相对参考系作如下齐次坐标变换:0.866-0.5000.00011.00.5000.8660.000-3.00.0000.0001.0009.00001写出变换后点矢量V的表达式,并说明是什么性质的变
4、换,写出 旋转算子Rot及平移算子Transo"0.866-0.5000.000 11.010.009.66解:V'二Av二0.5000.8660.000 一 3.020.0019.320.0000.0001.0009.030.0039_ 000 111属于复合变换:0.866-0.500旋转算子Rot Z, 30口二0.500.86600100_ 000'10011.0平移算子 Trans (11.0, -3.0, 9.0)=010-3.00019.000012、有一旋转变换,先绕固定坐标系Z.轴转45口,再绕其X.轴 转30口,最后绕其Y.轴转60,试求该齐次坐标
5、变换矩阵.解:齐次坐标变换矩阵 R=Rot Y, 60D Rot X, 30口Rot Z, 45口'0.500.866o''100o''0.707-0.70700_010000.866-0.500.7070.70700-0.86600.5000.50.866000100001000100010.660-0.0470.75000.6120.612-0.50-0.436 -0.436 0.433 00 0 0 13、坐标系B起初与固定坐标系0相重合,现坐标系B绕Zb旋转30口,然后绕旋转后的动坐标系的沧轴旋转45,试写出该坐标系B的起始矩阵表达式和最后矩阵表
6、达式.解:起始矩阵:B=0=10 0 00 10 00 0 100 0 0 1最后矩阵:=Rot Z ,30口 Rot X ,45口0.866 -0.3530.50.61200.707000-0.6120.7070oo014、如题图所示的二自由度平面机械手,关节1为转动关节,关节变量为关节2为移动关节,关节变量为d2.试:(1)建立关节坐标系,并写出该机械手的运动方程式.(2)按以下关节变量参数求出手部中央的位置值.6ion30 60口90口d2/m0.500.801.000. 70解:建立如下图的坐标系参数和关节变量连杆连杆转角e连杆扭角a连杆长度a连杆距离d19!000200d20cos.
7、_sinq0o''100厶sin 0.cosQ000100= RotZ、q=i00104 =AO=001000010001机械手的运动方程式:0 d2 cossin0cos 0 d2 sin01 0当 01=00 ,d2=0. 5 时:1 0 0手部中央位置值吐鳥;0 0 00.500当 0 1=300 ,手部中央位置值当 6 1=600 ,d2=0. 8 时'0.866-0.500.433'0.50.86600.40010.0001 _d2=1.0 时0.5-0.86600.5手部中央位置值3 =0.86600.50010.8660_ 0001 当 6 f90
8、Q , d2二0.7时_0 -100 _手部中央位置值3 =1 00 0010.700 0016、题6图所示为一个二自由度的机械手,两连杆长度均为伽,试建立各杆件坐标系,求出儿,仏及该机械手的运动学逆解.解:建立如下图的坐标系对于关节1: 1系相对于0系X0轴平移1m,然后绕Z0轴旋转61;对于关节2: 2系相对于1系X1轴平移伽,然后绕Z1轴旋转62;该二自由度机械手运动学方程式为:t2 = aa2 ,其中州=/?(Z(),&)77w2s(1QO)A2 =/?o/(Z,q)7k2$(lQO)所以,该二自由度机械手运动学方程式为:C0C02 -S0S02 +C0s8、c 比 +c&$0 +sO01c8CB、一s8s8、sOxcO2 +"*&00一c&Sa 一 s8C&-sOs02 +cOxc02000010根据该运动学方程为:0O.Y4Px°y 5 Py =AA°ZazPz'2001000 0用 A;1 =0 -1;J左乘上式,即0 1c0s&
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 《2025年企业与个人之间借款合同》
- 2024年榆林农业投资集团有限公司招聘真题
- 2024年新疆财经大学招聘事业编制人员真题
- 2025【中外合作经营合同范本(机械制造、技术研发)】机械制造合作协议合同范本
- 光电项目售后合同范本
- 2024年杭州东方中学招聘真题
- 2024年北京市公安局房山分局招聘勤务辅警真题
- 2014建租房合同范本
- 校园贷合同(2025年版)
- 理疗物品转让合同范本
- 四川成都历年中考作文题与审题指导(2005-2024)
- 2024年北京稻香村招聘考试真题
- 2025-2030中国全自动洗鞋机行业市场现状供需分析及市场深度研究发展前景及规划可行性分析研究报告
- 期货交易基础知识单选题100道及答案
- 兽医临床诊断学试题及答案
- 2023年河南单招英语模拟试题及答案
- 2023-2024学年广东省广州市越秀区培正中学七年级(下)期中数学试卷(含答案)
- 实验活动7 粗盐中难溶性杂质的去除课件-2024-2025学年人教版化学九年级下册
- 内部控制体系建设咨询项目咨询服务合同范本
- 2024届安徽省淮北市高三二模地理试卷
- 婴幼儿蚊虫咬伤概述陈丹丹讲解
评论
0/150
提交评论