



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、指导教师评定成绩:审定成绩:重庆邮电大学自动化学院自动控制原理课程设计报告设计题目:龙门刨床速度控制系统单位(二级学院):学生姓名:专业:班级:学号:指导教师:设计时间:重庆邮电大学自动化学院制目录TOC o 1-5 h z一、设计题目2二、设计报告正文3(一)、摘要3(二)、关键字3(三)、报告内容4龙门刨床的工作原理4各部分的原理及传递函数6系统的时域分析和频域分析10(四)、系统校正17三、设计总结23四、参考文献23自动控制原理课程设计任务书龙门刨床速度控制系统原理如下图所示。QFDCF贬it要求:查阅相关资料,分析系统的工作原理,指出被控对象、被控量和给定量,画出系统方框图。分析系统
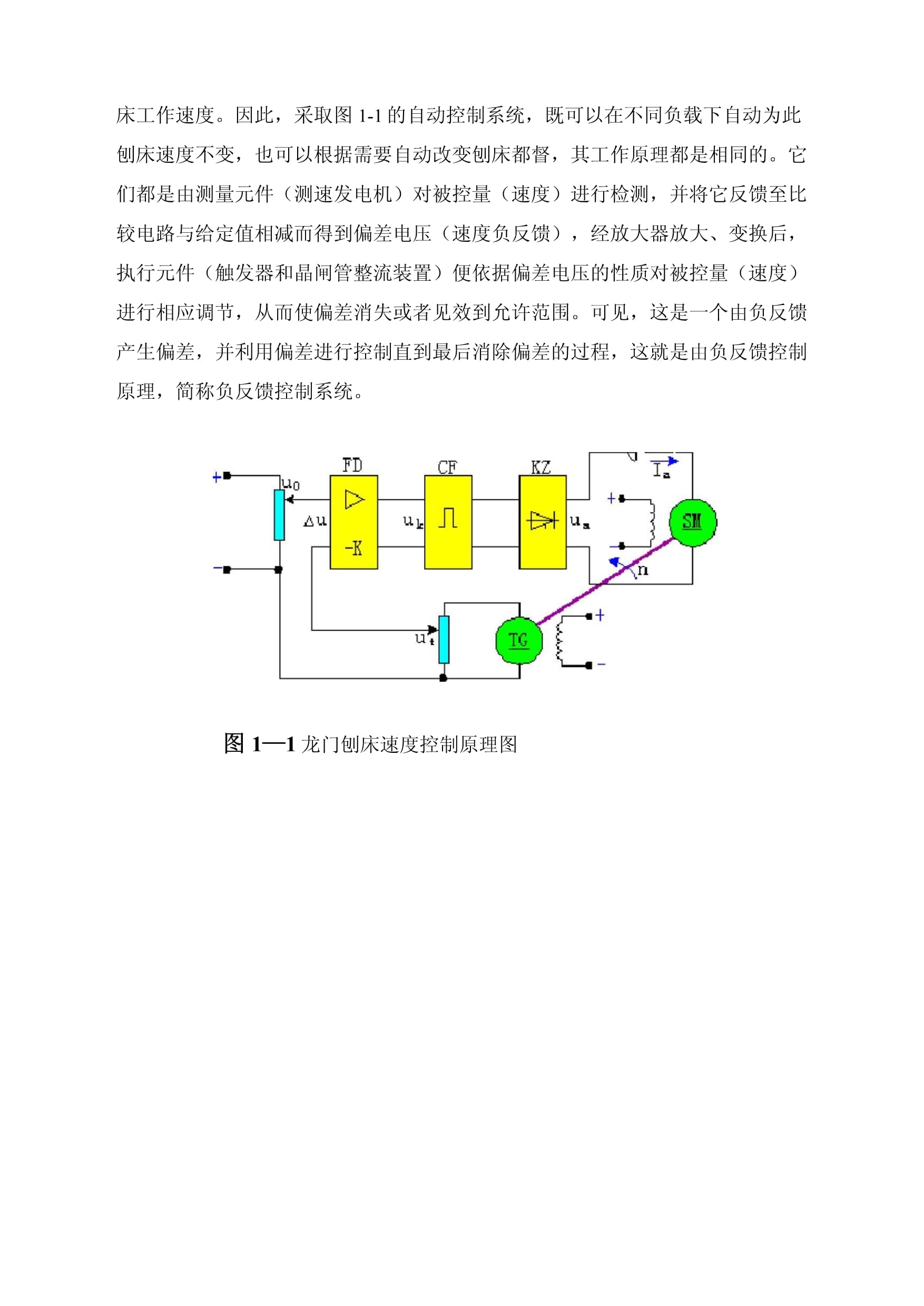
2、每个环节的输入输出关系,代入相关参数求取系统传递函数。分析系统时域性能和频域性能。运用根轨迹法或频率法校正系统,使之满足超调量小于20%,调节时间小于Is。摘要关键字:一、原理介绍在工业控制中,龙门刨床速度控制系统就是按照反馈控制原理进行工作的。通常,当龙门刨床加工表面不平整的毛胚时,负载会有很大的波动,但为了保证加工精度和表面光洁度,一般不允许刨床速度变化过大,因此必须对速度进行控制。图1-1是利用速度反馈对刨床速度进行自动控制的原理示意图。图中,刨床主电动机SM是电枢控制的直流电动机,其中电枢电压由晶闸管整流装置KZ控制,并通过调节触发器CF的控制电压u,来改变电动机的电枢电压,从而改变k
3、电动机的速度(被控制量)。测速发电机TG是测量元件,用来测量刨床速度并给出与速度成正比的电压u。然后,将u反馈到输入端并与给顶电压u反向串联tt0便得到偏差电压=u-u。在这里,u是根据刨床工作情况预先设置的速度给0t0定电压,它与反馈电压u相减便形成偏差电压,因此u是负反馈电压。一般,偏tt差电压比较微弱,需经放大器FD放大后才能作为触发器的控制电压。在这个系统中,被控对象是电动机,触发器和整流装置起了执行控制动作的作用,故称为执行元件。现在具体分析以下刨床速度自动控制的过程。当刨床正常工作时,对与某给定电压u,电动机必有确定的速度给定值n相对应,同时亦有相应的测速0发电机电压u,以及相应的
4、偏差电压和触发器控制电压uk。如果刨床负载变t化,如增加负载,将使速度降低而偏离给定值,同时,测速发电机电压41将相应减小,偏差电压将因此增大,触发器控制电压u也随之增大,从而使晶闸管k整流电压u升高,逐步使速度回升到给定值附近。这个过程可用图1-2的一组曲a线表明。由图可见,负载M在T时突增为M,致使电动机速度给定值N急剧1121下降。但随着和u的增大,速度很快回升,T时速度便回升到N,它与给定a22值N已相差无几了。反之,如果刨床速度因减小负载致使速度上升,则各电压1量反向变化,速度回落过程完全一样。另外,如果调整给定电国,便可改变刨0床工作速度。因此,采取图1-1的自动控制系统,既可以在
5、不同负载下自动为此刨床速度不变,也可以根据需要自动改变刨床都督,其工作原理都是相同的。它们都是由测量元件(测速发电机)对被控量(速度)进行检测,并将它反馈至比较电路与给定值相减而得到偏差电压(速度负反馈),经放大器放大、变换后,执行元件(触发器和晶闸管整流装置)便依据偏差电压的性质对被控量(速度)进行相应调节,从而使偏差消失或者见效到允许范围。可见,这是一个由负反馈产生偏差,并利用偏差进行控制直到最后消除偏差的过程,这就是由负反馈控制原理,简称负反馈控制系统。图11龙门刨床速度控制原理图图12龙门刨床速度自动控制过程应当指出的是,图1-1的刨床速度控制系统是一个有静差系统。由图1-2的速度控制
6、过程曲线可以看出,速度最终达到的稳态值N与给定速度N之间始终有21一个差值存在,这个差值是用来产生一个附加的电动机电枢电压,以补偿因增加负载而引起的速度下降。因此,差值的存在是保证系统正常过做必需的,一般称为稳态误差。如果从结构上加以改进,这个稳态误差是可以消除的。图1-3是与图1-2对应的刨床速度控制系统方块图。在方块图中,被控对象和控制装置的各元部件(硬件)分别用一些方块表示。系统中感兴趣的物理量(信号),如电流、电压、温度、位置、速度、压力等,标志在信号线上,其流向用箭头表示。用进入方块的箭头表示各元部件的输入量,用离开方块的箭头表示输出量,被控对象的输出量便是系统的输出量,既被控量,一
7、般置于方块图的最右端;系统的输入量,一般置于系统方块图的左端。二、各部分的原理及传递函数1、比较电路E(s)=E(s)-E(s)(2-1)12放大环节放大环节的微分方程为c(t)=Kr(t),式中,K为常数,称放大系数或增益。放大环节的传递函数为G(s)=K。放大环节的方框图如图所示。在一定的频率范围内,放大器、减速器、解调器和调制器都可以看成比例环节。U(s)=KE(s)caE(s)KU(s)t.IFac3.触发环节和晶闸管实物图如下:在这里把触发器和晶闸管看成一个电子元件把他们的结构和传递函数看成一个统一的整体来研究U(s)=U(s)d0Ts+1cU(U(s)7j-cU(s)cKU(s)d
8、0k.Ts+1s故传递函数为:KsTs+14.4.测速发电机为:由于测速发电机接有负载电阻,故测速发电机的传递函数u(s)_KE=Km式中,U(s)是测速发电机经分压后的输出电压;0(s)为测速发电机输入角速tm度,即是电机的角速度。下图为测速发电机的方框图5电机实物图如下:电机的传递函数如下:5电机实物图如下:电机的传递函数如下:0(s)U(s)-K一tcca电枢回路电压平衡方程u(t)=Ldia(t)+Ri(t)+E(2-2)aadtaaa式中E是电枢旋转时铲射的反电势,其大小与激磁磁通成正比,方向一样电枢a电压u(t)相反,即E=Co(t),C是反电势系数。aaeme电磁转矩方程TOC
9、o 1-5 h zM(t)二Ci(t)(2-3)mma式中,C是电机转矩系数;M(t)是电枢电流产生的电磁转矩。mm电动机轴上的转矩平衡方程J叭(t)+fo(t)=M(t)-M(t)(2-4)mdtmmmc式中,f是电动机和负载折合到电动机轴上的粘性摩擦系数;J是电动机mm和负载折合到电动机轴上的转动惯量。由式(2-2)(2-4)中校区中间变量i(t),E及M(t),便可得到以o(t)为aamm输出量,u(t)为输入量的直流电动机微分方程:ad2o(t)do(t)LJm+(Lf+RJ)m+(Rf+CC)o(t)amdt2amamdtammem=Cu(t)-LdMc(t)-RM(t)maadta
10、c(2-5)在工程应用中,犹豫电枢电路电感L较小,通常忽略不计,因而式(2-5)a可简化为do(t)TOC o 1-5 h zTm+o(t)=Ku(t)-KM(t)(2-6)mdtmmacc式中,T=RJ(Rf+CC)是电动机的时间常数;K=C/(Rf+CC),mamammemmammeK=R.(Rf+CC)是电动机传递系数。caamme上面我们已经求的电枢控制直流电动机简化后的微分方程为:T叭G)+w(t)=Ku(t)-KM(t)(27)mdtm1a2c式中M(t)可视为负载扰动转矩。根据线性系统的叠加原理,可分别求u(t)到w(t)和M(t)到w(t)的传递函数,以便研究在u(t)和M(t
11、)分别作用下的mcmac电动机转速w(t)的性能,将他们叠加后,便是电动机转速的相应特性。为求m0(s);U(s),令M(t)=0,则有mac(t)=Ku(t)1a(t)=Ku(t)1a(28)m+wdtm在初始条件下,即w(0在初始条件下,即w(0)=w(0)=0时,对上式各项求拉氏变换,并令mm(t),U(s)=9a则的s的传递方程&m(s)+1)0m(s)=KlUa(s)()0(s)KGV7=m1M(s)T(s)+1cmu(t)a,由传递函数定义,于是有(29)下图是它的方框图0(s)mU(s)0(s)mL龙门刨床动态结构框图:二A二A二幷图1一3由于我们用主导零级点简化了系统的特征根方
12、程,再加上该处认为负载转矩零,通过上面的公式推导我们得出了简化系统动态结构框图。龙门刨床的动态构简化框图如下:图14故该系统的开环传递函数如下:cKKKaG=pm0(图14故该系统的开环传递函数如下:cKKKaG=pm0(s)(Ts丄lTs+1丿sm三、对系统稳定性的评估在这里在系统的参数如下:K=24K=20K=10psma=0.04T=0.4T=10sm故把上面的参数带入上面的式子中可得开环传递函数为:G_76.80(s)_(0.4s+1)(10s+1)(210)(3-1)可知c76.8G_0(s)4s2+10.4s+1根据上面的式子可以得出该系统的闭环传递函数为:(3-2)1920G_(
13、s)4s2+10.4s+77.8有根据研究结果的普遍意义,可以将(1-4)式表示为如下标准形式:32a(3-3)G_n(s)s2+23s+32nn(3-4)由式(1-4)和式(1-5)相等可知:3=4.4101匚=0.2948n1、开环系统的零极点和图形开环传递函数即式(1-2)可知两个开环极点为:s=-2.1s=-0.1122、该系统的开环根轨迹图根轨迹突的分离点d为:11+d+5开环传递函数即式(1-2)可知两个开环极点为:s=-2.1s=-0.1122、该系统的开环根轨迹图根轨迹突的分离点d为:11+d+5d+0.17(3-5)nd=-1.3(2k+1)P=一anmk=0,+1,+2o(
14、36)兀n甲=a2工p-ZzIjc=-i1qanm(3-7)nc=-1.3a根据上面所得的数据可以画出该系统开环传递函数的根轨迹图形见图15abu忌一U-11111111RootLocirfi-1.5-1RealAxis-0.50.50.5O图1一5该系统的零极点图如图16所示:Pole-ZeroMapPole-ZeroMap_.uQM-4-ooO-LI-LI-LI-LI-1.5-1_.uQM-4-ooO-LI-LI-LI-LI-1.5-1RealAJslQ图1图1一63、开环函数的极坐标图该系统的极坐标图如图17所示0DCV-AELI-EiBE一40和20OO2-0DCV-AELI-EiBE
15、一40和20OO2-_u-on_34-IM4、该系统的动态性能指标该系统的动态图如图18所示图图18其中:3=3J1-匚23=3J1-匚2dn兀一Bt=r3dt=iMd3np33.5t=s3nC)-h(g)_phd)x100%(3-8)3-9)3-10)(3-11)(3-12)(3-13)由上面算出来的3和匚带入上面的公式中我们得出该系统的动态稳定性能为:n3=4.2143dt=0.2735sdt=0.4437srt=0.7455spt=3.3846ssc=37.94%aB=1.27165、稳态性能的分析稳态误差是描述系统稳定性能的一种性能指标,在阶跃信号、斜坡信号作用下进行测定和计算。若在时
16、间是无穷时,系统输出量不等于输入量或输入量的确定函数,则存在系统误差。稳态误差是系统控制精度或抗干扰动能力的一种度量。1)阶跃信号输入下的波形如图192)斜坡信号输入下的波形如图11035StepRespo仃生已图1一9图110因为该系统是零型系统,所以对阶跃信号来说是有差误差对单位脉冲信号和其他信号有稳态误差。ed)=可知:sslVUmGysjHys)stOe(a)=故对阶跃信号是有差跟踪ss1+K77.8对其他信号:e(a)=a,存在稳态误差。ss6、该系统的频率分析由开环传递函数,知道它的频率G,、的表达式如下:0(购)G=77.80(妙)(0.4j+1)(10j+1)在这里我们让G的模
17、等予1,即是:0(jo)IG1=1n=4.03860(j)cp=-arctan0.23-arctan6enp=146.823。cccc所以相角裕度r为:r=p+18Oo=33.177occ二阶函数不存在穿越频率3和幅值裕度GM.所得波德图如下:图111gHL匚BodeDiagramGm=InfdB(atInfrad/sec),Pm=-3:2deg(at4.0斗radfeec)402241艮HL匚BodeDiagramGm=InfdB(atInfrad/sec),Pm=-3:2deg(at4.0斗radfeec)402241艮ugjlugw61155专Lid5-U101U10053HI1Oicr
18、Frequency(rad/sec)图11100由上面的波德图我们可以看出该系统是稳定的,但是实际上一个系统与要比较宽的频率,这样可以是系统性能更好,能工作在范围更广的范围内,所以该系统的截止频率还不够好,在这里就需要我们改善截止频率使它满足要求。四、频率法校正系统1、超前校正网络该系统我们要提高它的截止频率,在该系统中加入一个超前校正网络。它的结构图如112所示:该校正网络的传递函数为:1+TsG(s)=a(4-1)d1+aTs其中:RT=RC,a20.m图112图1图112图113图1-14图14就是g(何血j的波德图由和=0,G(购)=-jr.1a二sin11图14就是g(何血j的波德图
19、由和=0,G(购)=-jr.1a二sin11+a可知:超前校正装置特点:、超前作用;在处,最大相位超前角甲,用于补偿原系统相位裕量Y的mmc不足。、前角申为低频衰减率a的函数,m.1a申=sin1一m1+a1a/申=sin1一(T90,m1+aa01一sina=m1+sinqm(3)、低频增益补偿低频衰减率a造成对开环增益K的衰减,因此,应0用时,要串联补偿放大器K=丄补足。ca2、计算超前网络的步骤(1)、做原系统的波德图40BudeOm=IntdB(tInfrsd/secPm=54.3degart3.93rad/sec)20o240601o2-11101010Frequency(radXs
20、ec)怔go53io3K产由上面可知道:O=4.0386.,Y=33.177cc因为该系统是零型系统,所以对阶跃信号来说是有差误差对单位脉冲信号和其他信号有稳态误差。Red)=可知:ss1+limG(s)H(s)st0故对阶跃信号是有差跟踪满足性能要求。e(J=丄=丄故对阶跃信号是有差跟踪满足性能要求。ss1+K77.8在这里我们要求该系统的要求为:35,y50cc(2)计算需补偿的相位超前角pp=y-y+(520)mcconp=5Oo一33.177o+2Oomnp=36.823。m3)计算衰减率a1-1-ap=sin-i一m1+a1-sinpna=m1+sinpmna=0.25054)确定新的开环截止频率3c在3cna=0.25054)确定新的开环截止频率3c在3c处应有L(3)=-L(3)cmom如图所示114Lo(3)o3=3m=-2-
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 企业客户服务大客户支撑方案
- 2026年贵州交安考试真题及答案
- 2026年执业医师资格考试实践技能病例分析答题要点含答案
- 2026年云南省临沧地区单招职业适应性考试题库含答案详解达标题
- 2026年事业编A类综合应用能力真题及答案解析
- 水源保护区划定项目水资源论证报告书
- 2026年临沧市新闻系统事业单位人员招聘考试题库及答案解析
- 2026年贵州省高职单招职业技能考试题库及答案解析
- 生物质直燃发电工程农用地转用方案
- 2026年地方病副高考试试题及答案解析
- 开国大典中华精神
- 2025福建省青山纸业股份有限公司招聘43人笔试历年备考题库附带答案详解试卷3套
- 危险化学品安全培训考试的试题及答案
- 2024-2025学年山东省临沂市高二下学期期末考试英语试卷(解析版)
- 喷漆样件管理制度
- 广东二造考试题库及答案
- 污水处理设施设备更新项目可行性研究报告
- 人口结构变化对中小学师资配置影响及调整机制研究
- 肝恶性肿瘤病人的护理查房
- 2025年天津市中考数学真题 (原卷版)
- 2025年广东省中考地理试题卷(标准含答案)
评论
0/150
提交评论