


版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、图像配准技术方法研究摘 要 随着信息技术的迅猛发展,图像配准技术已经在军事、遥感、医学、计算机视觉等多个领域得到了广泛的应用。图像配准技术是图像处理的一个基本问题,它是将不同时间、传感器或视角下获取的相同场景的多幅图像进行匹配的图像处理的过程。三类图像配准的方法大致如下:基于灰度的图像配准方法。基于变换域的图像配准方法。基于特征的图像配准方法。本文将应用这三种方法对图像配准进行研究。并重点研究基于特征的图像配准方法。关键词 图像配准,特征点匹配,灰度插值,控制点的提取AbstractThe technology of image registration is being widely use
2、d in the military, remote sensing , medical, computer, visual and any other fields with the rapid development of information technology. The technology of image registration is a kind of process to match different pictures getting from different periods and different cameras but a same scene, it is
3、a basic point to handle the pictures. There are three kinds of ways to do the image registration:According to the level of the color of gray getting from the pictures.According to transforming domains.According to the features The three kinds of ways will be used to discuss the image registration in
4、 the thesis, and the way according to the features will be discussed more in the thesis.Key words: Image registration, Match feature points, Gray inerpolation ,Collect the control points目 录1.绪论 . 11.1课题研究目的及意义 . 11.2国内外对本课题涉及问题的研究现状 . 12.研究方法与研究内容 . 32.1研究内容 . 32.2研究方法 . 33.图像配准的常用方法 . 43.1图像配准的定义 .
5、 43.2 基于灰度的图像配准方法. 53.3 基于变换域的图像配准方法. 63.4基于特征的图像配准方法 . 83.4.1特征提取 . 83.4.2变换模型 . 103.4.3坐标变换与插值 . 133.4.4图像配准实现 . 174.实验设计及分析 . 184.1 图像配准实验一. 184.1.1研究对象 . 184.1.2 过程实现 . 194.2 图像配准实验二. 244.2.1研究对象 . 244.2.2过程实现 . 25实验总结 . 34参考文献 . 35致 谢 . 36附 录 . 371.绪论1.1课题研究目的及意义图像配准是遥感图像处理、目标识别、图像重建、机器人视觉等领域中的
6、关键技术,是多传感图像融合的基础。军事、遥感、医学、计算机视觉等许多领域都需要图像配准,实际应用过程可能会有所不同,但其中关键的因素是类似的。经过多年的研究,图像配准技术已经取得了众多研究成果,但由于图像配准的输入数据来源的多样性,以及配准问题的复杂性,还有待于更进一步的发展。图像配准是图像融合技术的基本环节和首要问题,只有经过配准后的图像才能进行有效的融合,目标定位,变化监测,高分辨率图像的重建等后续处理工作,处理结果的好坏将直接影响后续工作质量。1.2国内外对本课题涉及问题的研究现状国外从20世纪60年代就开始在图像配准领域进行研究,但直到1980年代才开始引起学者们的关注。到上世纪末,单
7、模图像配准问题已基本解决,但多模图像配准由于涉及模式和领域的复杂性,仍需密切关注。国际上对图像配准技术曾做过调查,其结论是1990年代初技术文献明显增加。而国内从1990年代初才开始涉足此领域。图像配准最早在美国七十年代从事的飞行器辅助导航系统、武器投射系统的末制导以及寻地等应用研究中提出。八十年代后,在很多1不同领域都有大量配准技术的研究,如遥感领域,模式识别,自动导航,医学诊断,计算机视觉等。由此可见,图像配准技术经过多年研究,不论国内外,发展的都非常迅速,已经取得了许多研究成果。图像配准的高精度、图像配准算法的强鲁棒性、图像配准算法的配准速度以及图像配准的自动化一直以来都是图像配准领域所
8、不断追求的目标。22.研究方法与研究内容2.1研究内容本论文主要是对图像配准技术方法进行研究。讨论了图像配准技术的常用方法,包括基于灰度的图像配准方法,基于变换域的配准方法以及基于特征的图像配准方法,并通过一定的理论分析来了解每种图像配准技术的特点。除此之外,本文还重点就基于特征的图像配准方法展开的深入的讨论研究,并通过一系列的实验来具体实现不同图像的配准。2.2研究方法该论文主要是运用一系列图像处理手段,对待配准的图像进行一定的变换与处理,例如:投影变换,非线性变换,刚体变换,放射变换,傅里叶变换,坐标变换与插值等,从而实现不同图像间的高精度配准。33.图像配准的常用方法所有的图像配准方法都
9、可以概括为两类,相对配准和绝对配准。相对配准指的是从多个图像中选择一张图像作为参考,而其他图像与之相配准,坐标任意。绝对配准指的是定义一个控制网络,其他图像都与之相配准,进而分别完成各个分量图像的几何校正,实现坐标系的统一。本论文主要研究图像的相对配准。目前,根据图像配准中利用的图像的信息区别将配准方法分为三类:基于灰度的图像配准、基于变换域的图像配准和基于特征的图像配准。3.1图像配准的定义图像配准就是寻求图像之间一对一的映射的过程,即两幅图在空间和灰度上的映射1。假设给定尺寸的二维矩阵图像I1(x,y)和I(,2x,y)分别表示相对位置(x,y)上的灰度值。图像配准的关键问题就是图像之间的
10、空间和几何变换。I1(x,y)作为参考图像,而I2(x,y)作为待配准图像。令f表示一个二维空间的坐标变换,设变换后图像为If(x,y),则参考图像I1(x,y)与变换后的图像If(x,y)之间的关系为:If(x,y)=f(I1(x,y) 根据配准的定义,希望变换后的图像I1(x,y)与待配准图像I2(x,y)的对齐度最大。此时变换f是一个二维空间域坐标的几何变换,即为:(x,y)=f(x,y)43.2 基于灰度的图像配准方法基于灰度的配准方法通常不需要对图像进行复杂的预处理,而是利用图像的某些统计信息来作为度量图像的相似程度。主要的特点是实现较为简单,但应为的范围较窄,不能直接用于校正图像的
11、非线性形变,并且在最优变换的搜寻过程中通常需要巨大的运算量。经过多年发展,人们提出了多种基于灰度的图像配准方法,主要分为三类:序贯相似检测算法、互相关算法、交互信息算法。(1) 序贯相似检测算法序贯相似检测算法(Sequential Similarity Detection Algorithms,SSDAS)是由Barnea等人提出来的,这种方法具有效率高,处理速度快的特点6。首先这个方法实际上是个误差绝对值的积累,在非匹配的图像位置,累加时E(a,b)增长较快,而在匹配图像位置上E(a,b)随累加次数增加而变得缓慢。如果先选择一个简单的固定门限T,若在某点上计算两幅图像残差和的过程中,残差和
12、大于该固定门限T,就认为当前点不是匹配点,从而终止当前的残差和的计算,转向别的点去计算残差和,最后认为残差和增长最慢的点就是匹配点。这种方法就是固定门限的SSDA算法。上述E(a,b)为一个在计算上更为简单的相似性度量准则:E(a,b)=ååxyT(x,y)-f(x-a,y-b)(2) 互相关算法互相关算法是最基本的基于灰度统计的图像配准的方法,它常常5被用在进行模板匹配和模式识别。通过计算模板图像和搜索窗口之间的互相关值大小来确定匹配程度,互相关值最大时的搜索窗口位置决定模板图像在待配准图像中的位置。以上的相似准则方法都是传统基于灰度的相关运算。(3) 交互信息算法Vio
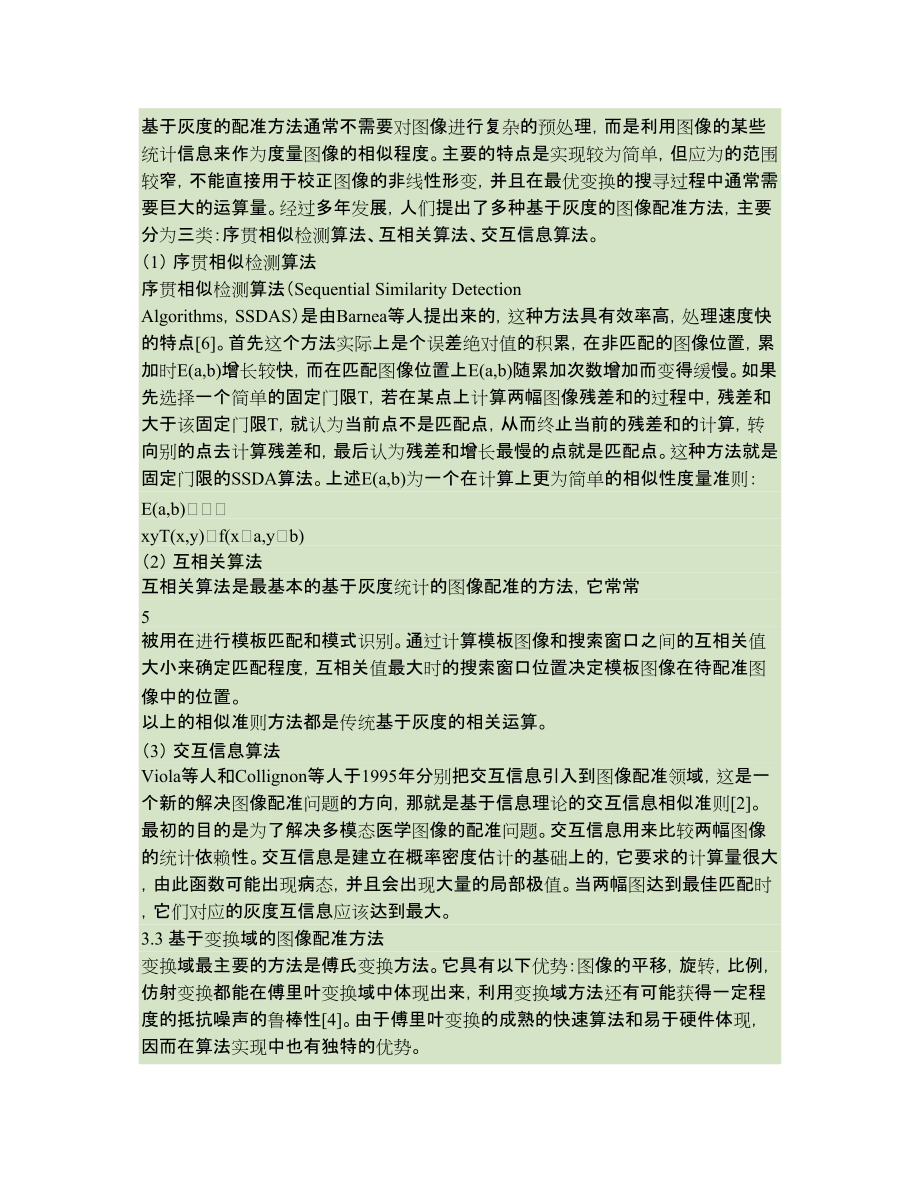
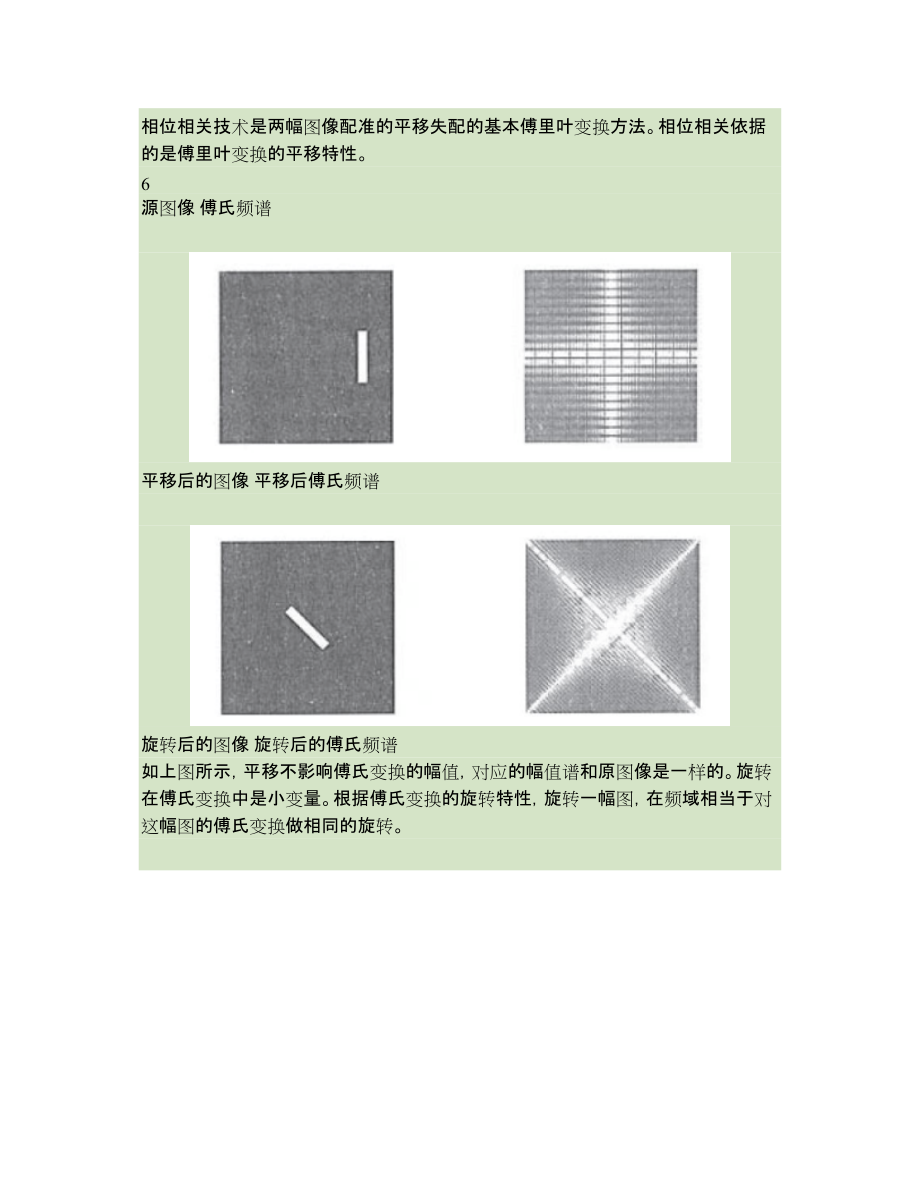
13、la等人和Collignon等人于1995年分别把交互信息引入到图像配准领域,这是一个新的解决图像配准问题的方向,那就是基于信息理论的交互信息相似准则2。最初的目的是为了解决多模态医学图像的配准问题。交互信息用来比较两幅图像的统计依赖性。交互信息是建立在概率密度估计的基础上的,它要求的计算量很大,由此函数可能出现病态,并且会出现大量的局部极值。当两幅图达到最佳匹配时,它们对应的灰度互信息应该达到最大。3.3 基于变换域的图像配准方法变换域最主要的方法是傅氏变换方法。它具有以下优势:图像的平移,旋转,比例,仿射变换都能在傅里叶变换域中体现出来,利用变换域方法还有可能获得一定程度的抵抗噪声的鲁棒性
14、4。由于傅里叶变换的成熟的快速算法和易于硬件体现,因而在算法实现中也有独特的优势。相位相关技术是两幅图像配准的平移失配的基本傅里叶变换方法。相位相关依据的是傅里叶变换的平移特性。6源图像 傅氏频谱平移后的图像 平移后傅氏频谱旋转后的图像 旋转后的傅氏频谱如上图所示,平移不影响傅氏变换的幅值,对应的幅值谱和原图像是一样的。旋转在傅氏变换中是小变量。根据傅氏变换的旋转特性,旋转一幅图,在频域相当于对这幅图的傅氏变换做相同的旋转。7在噪声的敏感性喝计算的复杂性上变换域配准方法有一定优势,但这一方法只限于傅氏变换的不变性,只适用于傅氏变换中旋转、平移的图像转换中,此时就需要基于特征的图像配准方法来解决
15、10。3.4基于特征的图像配准方法基于特征的图像配准首先要对待配准图像提取图像信息的特征,然后再利用提取得到的特征完成两幅图像特征之间的匹配,并通过特征的匹配关系来建立图像间的配准映射关系。对于基于特征的图像配准方法而言,它的一般配准步骤通常为:特征提取,变换模型,坐标变换与插值,图像配准实现等步骤。3.4.1特征提取对于大多数图像配准操作而言,在正式进行图像配准之前,对参考图像和带配准图像进行准确而有效的图像特征提取是十分必要的。因为该操作不仅能够提高图像匹配的准确性,还可以提高匹配速度,因此能否合理的进行图像特征提取就成为了图像匹配操作成功的一个关键。那么我们通常所说的图像特征又表现在那些
16、方面呢?事实上,所谓的图像特征大多是指图像中的、线、轮廓,区域或边缘等等。另一方面,根据具体特征的不同,可以将特征提取3。的方法分为:点特征提取和结构特征提取。(1)点特征提取8点特征是配准中最常用到的图像特征之一。点特征表示和操作简单,同时也能反映图像的本质特征。所谓点特征提取即提取出图像中的显著点,通常我们将这些显著点称之为控制点5。在利用该方法进行图像配准时,首先选取待配准图像和参考图像的控制点,然后再以这些图像的控制点作为依托进行图像配准的后续操作。可见,控制点的选取是非常重要的。一般情况下我们在选择图像控制点的时候应当考虑一下几个方面: 控制点在图像中的分布是否均匀; 所选择的控制点
17、在待配准图像和参考图像中的位置是否一致; 控制点所处区域或其周围区域的特征是否独特;此外,还需要注意的是特征点的数目是否合理。因为配准运算需要足够的特征点,但过多的特征点则阻碍配准的顺利进行。目前常用的控制点选取方法主要有两个,它们分别是:算法估计和用户自行选取。这两种方法我们在后文的实验中都会涉及到。(2)结构特征提取所谓的结构特征既是前面我们所提到的,区域,轮廓,表面等。而对结构特征的提取是在图像分析中非常重要的一个基本问题。其中,边缘是最为常用的结构特征。边缘变现了目标边界,因此对配准、分割和辨识场景中的目标都很有用。利用提取的边缘可以实现测量物体的面积及周长、识别出特定的物体、求两幅图
18、像的对应点等操作。另一方面,边缘检测与提取的处理进而也可以作为更为复杂的图像识9别、图像理解的关键预处理来使用事实上,对图像的边缘和区域边界的检测过程是具有一定难度的。我们都知道,由于图片在拍摄过程中所遇到的光线和摄影设备等问题,使得所要处理的目标图像具有一定的模糊性和不均匀性。此外,由于外界的不同强度及不同类型的干扰,使得所获图像产生了不同程度的噪声。而这些不可避免的噪声毫无疑问会给我们后续的边缘检测甚至是最后的图像配准操作带来不便。因此在进行图像的边缘检测之前需要首先对含有大量噪声问题的目标图像进行一定的预处理。预处理的目的是增强图像中数据的可视化效果,在消除图像数据中的噪声的同时高图像的
19、质量。于此同时,合理的对图像进行预处理还能够有效的增强图像的纹理效果,突出图像所要研究的主体部分。这也为图像的后续操作提供有利条件。目前,常见的预处理操作主要包括:灰度化,点处理,平滑滤波等操作。3.4.2变换模型所谓的变换模型是指根据参考图像和待配准图像之间所产生的的几何上的畸变,来选择可以拟合两图像之间的变化情况的最优几何模型。常用的图像变换模型有:图像的变换模型(表示满足)101刚体变换 刚性变换是两幅图像中的两点之间的距离变换后仍保持不变,这样的变换就称为刚性变换。刚性变换可以分解为3个步骤:平移、旋转和反转。在二维空间中,点(x,y)经刚体变换到点(x,y)的变换公式:ét
20、xùéx'ùécosj±sinjùéxùê'ú=êúêú+êtúësinjmcosjûëyûëyûëyûétxùêú其中j为旋转角度,tëyû2仿射变换仿射变换可以分为: 为平移量。(1) 对坐标进行缩放、平移、旋转后得到新坐标的值;(2) 经过对坐标轴的缩放、平移、旋转后原坐标在新
21、坐标领域中的值。仿射变换形式为:f(x)=Hx+k其中H是变形矩阵,k是平移矢量。在二维空间中,H可以按照以下4步进行分解:平移、缩放、扭曲、旋转。平移Hæs=çès0ö÷,s³00øs缩放11Htæ1=çè00öæs÷,HtHs=çtøè00ö÷stø扭曲æ1Hu=çè0uöæs÷,HuHtHs=ç1øè0stu&#
22、246;÷stø旋转Hqæcosq=çèsinq-sinqö÷,0£q£2pcosqøstucosq-sinqö÷stusinq+cosqøæscosqHqHuHtHs=çèssinq变换后的矩阵为æx'öæxöæscosqç'÷=ç÷´çèyøèyøèssinq
23、stucosq-sinqö÷,0£q£pstusinq+cosqø下图为图像经过仿射变换。a.源图像 b.仿射后图像 图 仿射变换12(3) 投影变换投影变换是将图像像素点的坐标变换为另一种图像像素点的坐标的过程。用笛卡尔坐标表示是平面的分式线性变换,形式如下: x='a11+a12y+a13a31x+a32y+a33a21x+a22y+a23a31x+a32y+a33且 a11y='a12a22a32a13a23¹0a33 a21a31下图为源图像经过投影变换a.源图像 b.投影变换后图像 图 投影变换3.4.3坐标
24、变换与插值在进行图像的缩放、旋转和复合变换等。源图像的像素坐标为整数,而变换后图像的坐标不一定是整数,相反也是如此。因此,在图像的几何变换中,除了要进行几何变换运算外,还要进行灰度插值除13理。常用的灰度插值方法有三种:最近邻插值法、双线性插值法和三次内插法。1. 最近邻插值法最近邻插值法是将(x0,y0)点最近的整数坐标(x,y)点的灰度值取为(x0,y0)点的灰度值。在(x0,y0)点各个相邻像素间灰度变化较小时,这是一种简单快捷的方法,但当(x0,y0)点相邻像素间灰度差很大时,这种灰度估值方法会产生较大的误差11。2. 双线性插值法双线性插值法是对最近邻法的改进,即用线性内插的方法,根
25、据点P(x0,y0)的四个相邻灰度值,插值计算出灰度值f(x0,y0),具体计算过程如下:(1) 计算和。=x0-x =y-y0(2) 先根据f(x,y),f(x+1,y)插值求f(x0,y)。14f(x0,y)=f(x,y)+f(x+1,y)-f(x,y)(3)在根据f(x0,y+1),f(x+1,y)插值求f(x0,y+1)f(x0,y+1)=f(x,y+1)+f(x+1,y+1)-f(x,y+1)(4)最后根据f(x0,y)及f(x0,y+1)插值求f(x0,y0)。f(x0,y0)=f(x0,y)+f(x0,y+1)-f(x0,y)=(1-)(1-)f(x,y)+(1-)f(x+1,y
26、)+(1-)f(x,y)+f(x+1,y+1)=f(x,y)+f(x+1,y)-f(x,y)+f(x,y+1)-f(x,y)+f(x+1,y+1)+f(x,y)-f(x,y+1)-f(x+1,y) 其中x=x0;y=y0。此方法考虑了(x0,y0)点的直接邻点对它的影响,因此一般可以得到令人满意的插值效果9。但这种方法具有低通滤波性质,使高频分量受到损失,图像轮廓模糊。在某些应用里,双线性插值的斜率不连续还可能会产生一些理想的结果。153. 三次内插值法三次内插值法不仅考虑(x0,y0)点的直接邻点对它的影响,还要考虑到该点周围16个邻点的灰度值对它的影响。根据连续信号采样定理可得,若采样值用
27、插值函数S(x)=sin(px)/(px)插值,当采样频率不低于信号谱最高频率的两倍时可以准确地恢复原信号,并可以准确得到采样点间的任意点的值。此方法计算量很大,但更为精确,能保证较好的图像边缘9。插值特性如图:S(x)=sin(px)/(px)可以采用以下三次多项式近似。23ì1-2x+xï2ïS(x)í4-8x+5x-xï0ïîx>132>x³1x³2163.4.4图像配准实现基于特征的配准方法在图像配准中最为常见,对于不同特性的图像,选择图像中容易提取,并能在一定程度上代表待配准图像相似
28、性的特征作为配准依据。基于特征的配准方法具有最强的适应性。174.实验设计及分析本论文主要针对在图像配准技术中最为常用的基于特征的图像配准方法展开实验。通过对不同图像的配准过程进行研究,来更加深入的对图像配准技术进行认识。4.1 图像配准实验一4.1.1研究对象该实验选取了医学常用人脑CT图片。其中图1为参考图片,图2为待配准的图片。可以看到两幅图片无论在大小和图片的质量上均存在着差异。而对这些差异的处理就是我们整个图像配准工作的重点和难点。18图1图24.1.2 过程实现(1)图像灰度化对图像进行灰度化不仅可以节省存储空间还便于后续研究。 以待配准图像为例,原始的待配准图像为:灰度化处理后的
29、待配准图像为:19(2)特征提取前面我们已经提到过常见的特征提取方法有点特征提取和结构特征提取。对于本研究对象而言,我们通过观察待配准图像可知,由于该图像的医学性质使得图片中的各部分组织图像特征区分并不明显,所以不宜采用结构特征提取的方法。在加上图片本身的噪声并不是非常的大,因此,我们选择点特征提取的方法来进行图像的特征提取。在本试验中我们采用MATLAB环境下的图形处理工具箱来完成图像控制点的选择。首先,随机选取若干控制点进行配准,处理后的图像界面如下:20(3)坐标变换与插值通过上述理论分析我们已经很清楚,常用的插值方法有三种,它们分别是最近邻插值法,双线性插值法和三次内插值法。用这三种方
30、法处理后的图像如下图所示:21由上图对比可以观察出采用三次内插值法所进行的坐标变换与插值的效果最好。所以采用三次内插值法得到的结果图即为最终配准后所得到的图像。(4)实验总结从图中我们可以看出配准后的图像与原参考图像相比,仍存在一些差距,即为实验的误差。下面我们通过计算配准后的图像及原参考图像所对应的二值图像的面积,周长,重心,来对比观察实验误差。 在MATLAB环境下,计算结果如下:22虽然上述数据仍存在一定的误差,因为不同的灰度图像在进行二值化后的效果本身就存在着一定的差异。但是,我们还是可以从上表中观察出,配准后的图像与原图像并不完全相符,因此,该方法并不是完美的,仍需要优化。下面介绍优
31、化过程:在控制点的选举方面进行优化,从上述实验看出,待配准图像与参考图像的控制点的坐标选取不完全相同。因此我们可以从这点入手,将两图像的控制点坐标选取相同,观察效果。控制点坐标选取相同时的坐标为lpoint=12,12;15,23;145,77;145,145;168,211;参考图像的控制点选取 kpoint=12,12;15,23;145,77;156,200;134,184;待配准图像的控制点选取,处理后的图像与原图像进过对比如下:有上表数据得,优化后的图像配准效果与原图基本吻合。在选取控制点坐标时,两幅图的坐标选取尽量保持一致。234.2 图像配准实验二4.2.1研究对象本实验的研究对
32、象如下图所示,为学生自行拍摄的本学校的宿舍楼图片。其中图1为参考图片,图2为待配准的图片。可以看到两幅图片无论在大小和图片的质量上均存在着差异。而对这些差异的处理就是我们整个图像配准工作的重点和难点。图1图2244.2.2过程实现(1)预处理由于待处理图像的质量问题,在便于提取之前首先应对待处理图片进行一定的预处理,具体操作如下: 滤除模糊在获取图像时,由于景物和摄像机之间的相对运动,造成图像的模糊。其中由于均匀直线运动所造成的模糊图像的恢复问题更具有一般性和普遍性意义。因为变速的、非直线的运动在某些条件下可以看成是均匀的、直线运动的合成结果7。水平方向均匀直线运动造成的图像模糊的模型及恢复的
33、近似公式用以下两式表示:g(x,y)='òT0atéùfê(x-),yúdt Tëûmf(x,y)»A-mg(x-ma),y+åg(x-ka),y 0£xy£'k=0L其中a为总位移量,T为总运动时间。在计算机处理中,多用离散形式的公式如下:T-1g(x,y)=åt=0atéùfêx-,yú·Dx Tëûf(x,y)»A-méëg(x-ma),y-g(x-ma-
34、1),yùû/Dxm+åéëg(x-ka),y-g(x-ka-1),yùû/Dxk=00£xy£L由垂直方向均匀直线运动造成的图像模糊模型及恢复的近似公式如下:25T-1g(x,y)=åt=0f(x,y-btT)·Dyf(x,y)»A-méëgx,(y-mb)-gx,(y-mb-1)ùû/Dym+åéëgx,(y-kb)-gx,(y-kb-1)ùû/Dyk=0上述模糊图像的恢复处理结果如
35、下:原带配准图像滤除模糊后图像 灰度化在图像的成像过程中,由于环境限制等因素的影响,生成的图像往往对比度不足,造成图像的视觉效果差。对此,可采用图像灰度值变换的方法,即改变图像像素的灰度值,以改变图像灰度的动态范围,增强图像的对比度。设原图像为f(m,n),处理后为g(m,n),则对比度增强可表示为g(m,n)=Tf(m,n)其中,T·为增强图像和原图像的灰度变换关系。针对数字图26像,由于其灰度取值的离散性,而通过T·计算的增强值可能带有小数部分,一般采取四舍五入取整的方法,使g(m,n)仍取整数。因此,这里的T·也隐含灰度变换值的取整过程。上述灰度处理后的图片
36、如下:灰度化结果图像 直方图均衡化直方图均衡化是通过对原图像进行某种灰度变换,使变换后图像的直方图能均匀分布,这样就能使原图像中具有相似灰度且占有大量像素点的区域之灰度范围展宽,使大区域中的微小灰度变化显现出来,使图像更清晰。实际变换函数为jj=Ti=INT(L-1)åP(i)+0.5i=0均衡化处理后的图片如下:27 平滑处理图像平滑主要有两个作用:一个是消除或减少噪声,改善图像质量;另一个是模糊图像,使图像看起来柔和自然。空间域常用的方法有邻域平均法、中值滤波法、多图像平均法等;邻域平均法就是对原始图像的每个像素点(x,y)取一个邻域R,计算R中所有像素和该点的灰度平均值,把它赋
37、给输出图像中的对é应点,即:g(x,y)=êf(x,y)+ëå(i,j)ÎRùf(i,j)ú/(m+1) û其中,R为预先确定的邻域(不包括(x,y);m为邻域R中像素的点数;g(x,y)为输出图像;f(x,y)为原始图像3。多图像平均法是对获取的同一景物的多幅图像相加取平均来消除噪声。设fm为参与平均的M帧图像中的第m帧图像,这种技术的28_算法是f(i,j)=1MMåm=1fm(i,j),i,j=0,1,×××2设图像g受加性噪声n干扰,n的均值为0、方差为s之间是不相关
38、的,则含噪图像fm某像素的灰度fm(i,j)=g(i,j)+nm(i,j),且帧式中nm是噪声图像第m个实现。多图平均后点(i,j)处的灰度为_f(i,j)=1MMåm=1fm(i,j)=g(i,j)+1MMånm=1m(i,j)s2此式表明,这种算法不平滑图像信号,而使噪声方差变为M,从而抑制了噪声,参加平均的图像数目越多,消减噪声的效果越好。邻域平均法在滤除噪的同时模糊了图像,而中值滤波在一定条件下,可以克服线性滤波器所带来的图像细节模糊,能够在去除噪声的同时保持图像边缘。 中值滤波具有如下重要特性: 对离散阶跃信号、斜升信号不产生影响,连续个数小于窗口长度一半的离散脉
39、冲将被平滑,三角函数的顶部平坦化。 令C为常数,则MedCFjk=CMedFjkMedC+Fjk=C+MedFjkMedFjk+fjk¹MedFjk+Medfjk 中值滤波后,信号频谱基本不变。29处理后的图片如下:从图中可见,中值滤波法能有效消弱椒盐噪声,在各个模板效果对比中可见,5*5模板处理后的效果是最佳的,并且在误差允许范围内几乎没有失真。(2) 特征提取该过程是本实验的一个重点研究过程。通过对比参考图片和带配准图片,我们不难发现,带配准图像的噪声是非常大的,因此若想直接在该图像上进行控制点的提取显然是非常困难的。这就需要我们首先进行前文中所提到的另一种特征提取方法,即提取。
40、然后再根据需要考虑是否进行控制点的提取。常用的结构特征有很多,在前文中已经提及,这里不再重复。针对该图像我们主要提取出图像的重点区域。即进行二值化处理。二值图像是指只有黑白两个亮度值的图像,是灰度图像的一个特例。及时是灰度图像也可以进行位平面分割而形成一系列的二值图30像。悬着灰度阈值对图像二值化是图像处理中最常见的11。假设一幅图像f(x,y),悬着对应灰度作为阈值T,利用下式对图像二值化得到二值图像g(x,y)ì0g(x,y)=íî1f(x,y)<Tf(x,y)³T经二值化处理后的图片如下:二值化图像同样的,用相同方法对参考图像进行一系列处理。
41、最终处理后的二值化图像如下:通过观察,两幅图像经过处理后,其主要的图像结构一目了然,这也为后续的操作奠定了基础。31经过结构特征提取操作后,我们还需要进行控制点的特征提取。方法同实验一。控制点的提取情况如下:(3)坐标变换与插值经过变换模型和坐标变换与插值的选择及操作后,得到最终配准后的图像,如下图:配准前后的比较图如下:32(5)实验总结在上述实验过程中可以看出经过预处理后的待配准图像质量明显提高,有利于后续的控制点选取和图像配准,而且大大减少了计算量。从实验结果图中可以看到,配准效果非常好,达到本实验的目的。33实验总结本课题的目的是基于特征的图像配准的方法来实现图像的配准。由于待处理图像
42、的质量问题,在便于提取之前首先应对待处理图片进行一定的预处理。然后再进行一系列的实验后,最终实现图像的准确配准。此方法也存在一定的不足,由于图像的不同质量,还有方法的局限,应用的范围不是很广。因此该方法有局限性。34参考文献1 孙即祥图像处理北京 科学出版社 2004年2 贾永红 数字图像处理武汉 武汉大学出版社2003年9月3 许录平 数字图像处理北京 科学出版社 2007年4 曹茂永,孙农亮等数字图像处理北京 北京大学出版社2007年9月5 杨杰,黄朝兵数字图像处理及MATLAB实现北京 电子工业出版社2010年2月6 阮秋琦数字图像处理北京 电子工业出版社2001年1月7 王洪元,石澄贤
43、,郑明芳等MATLAB语言及在电子信息工程中的应用北京 清华大学出版社2004年12月8 Jain,a.k.著;韩博,徐枫译数字图像处理基础北京 清华大学出版社2006年11月9 张德丰MATLAB数字图像处理北京 机械工业出版社2009年1月10 贺兴华,周媛媛,王继阳,周晖等MATLAB7.X图像处理北京 人民邮电出版社2006年11月11张德丰详解MATLABA数字图像处理北京 电子工业出版社2010年7月35致 谢本论文能在有限的时间内完成,首先要诚挚感谢我的指导老师李向群老师,在忙碌的教学工作中挤出时间来检查、修改我的论文。还要感谢一直帮助我完成论文的同学,没有你们的耐心讲解,我是不会保质完成论文,在此表示感谢。在完成本论文的过程中,让我学会了如何分析问题,而且培养了我的耐性。在论文设计过程中也出现了许多问题,但在老师以及同学、朋友的积极讨论,和查找相关
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 2025年-重庆市建筑安全员知识题库
- 2025年青海省安全员C证考试(专职安全员)题库及答案
- 实施防火阻燃面料安全生产制度
- 梳理陪诊师考试知识框架的试题及答案
- 2025年高吸收加脂剂项目建议书
- 2025年湖南建筑安全员《B证》考试题库及答案
- 2024年陪诊师考试纵深理解与总结:试题及答案
- 2024年全球粮食安全与地理因素试题及答案
- 智能家电智能家居平台及设备整合解决方案
- 深入剖析全媒体运营师职能定位:试题及答案
- 多重耐药菌防控专家共识
- 教育家的师德情怀(终稿)课件
- 复变函数与积分变换全套课件
- 厂内机动车辆课件
- 学校食堂餐厨具操作规程
- DB32T 3916-2020 建筑地基基础检测规程
- 公务员登记表
- 自动控制原理全套课件
- 质量部KPI考核指标
- 肩关节镜下肩袖修补术的护理查房ppt
- 菠菜色素提取和分离
评论
0/150
提交评论