



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、 “2012年全国职业院校技能大赛”高职组机器人技术应用赛项规程一、竞赛名称机器人技术应用用主题:智能工厂厂二、竞赛目的设计本方案的目目的,寄希望望于通过技能能大赛,加快快工学结合人人才培养模式式和课程改革革与创新的步步伐,探索培培养企业需要要的机器人使使用、维护维维修的高素质质技能型人才才新途径、新新方法。本方案通过信息息技术创新手手段,以智能能机器人为载载体,运用物物联网技术在在一定程度实实现的智慧工工厂模式,提提炼竞赛内容容;按照技术术应用要求和和策略选择(反反映动手能力力和体现创新新意识)的实实际过程编排排竞赛过程;检阅参赛队队组织管理、团团队协作、工工作效率、质质量与成本控控制、安全
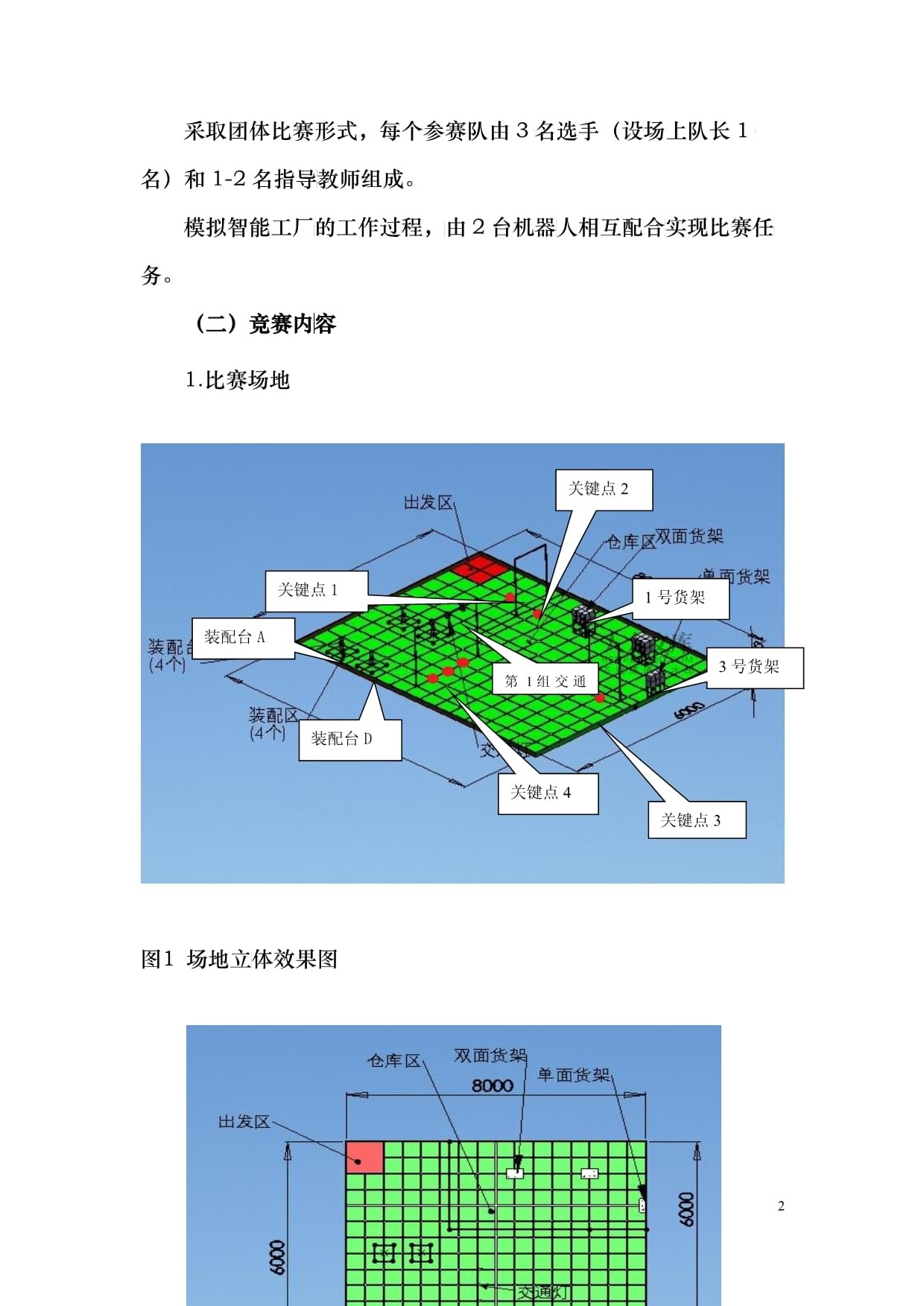
2、意意识等职业素素养;引导高高职院校关注注行业在“机器人技术术应用”、“物联网技术术应用”方面的发展展趋势及新技技术的应用;物化竞赛结结果,提高竞竞赛成绩评定定的客观性,增增强观赏性和和扩大宣传效效应。促进智智能机器人技技术(尤其是是自主识别、自自主决策技术术)及物联网网射频识别技技术的普及。三、竞赛方式与与内容(一)竞赛方式式采取团体比赛形形式,每个参参赛队由3名名选手(设场场上队长1名名)和1-2名指导教教师组成。模拟智能工厂的的工作过程,由由2台机器人人相互配合实实现比赛任务务。(二)竞赛内容容1.比赛场地关键点2关键点2关键点11号货架关键点11号货架装配台装配台A第1组交通灯第1组交通
3、灯3号货架装配台装配台D关键点4关键点4关键点3关键点3图1 场地立体体效果图图2 场地俯视视图本场地模拟了一一个智能工厂厂的布局。(1)尺寸:大大小为8米*6米。其中外外围档板高110cm,材质为为木工板,上上面贴有300mm宽的白白色引导条。(2)货架:分分为单面货架架1个(3号号货架,上下下2层,可以存放66个工件);双面货架22个(1号和和2号货架,上下2层,分别可可以存放122个工件);1号货架架存放位置编编号A1-AA6、B1-B6,2号号货架存放位位置编号C11-C6、DD1-D6,33号货架存放放位置编号E1-E6。货架的定义编号号如图3所示示图3 货架的定定义编号(3)出发区
4、:机器人正式式启动前所停停泊的区域,大大小为10000mm*1000mmm。(4)交通灯:3组交通灯灯,每一组交交通灯有红绿绿2盏交通灯灯。比赛时,22组亮红灯,11组亮绿灯,机机器人必须从从绿灯下的道道路通过。比比赛开始后,安安装在框架上上的交通灯控控制器将3组组交通灯亮灯灯情况以无线线通讯方式发送给机机器人。(5)装配台:共有4个装装配台,编号号从0A-0D,在场地上上按照顺时针针摆放,机器人人在此处将携携带的工件根根据任务中规规定的要求进进行堆放。每每个装配台周周围有一个5500mm*500mmm的装配区。每个装配台有22个工件摆放放位置,下部部位置为A22、B2、CC2、D2;上部位置
5、为为A1、B11、C1、DD1。(6)工件:使使用尼龙,330个工件,每每个工件均贴贴有RFIDD标签,RFID标标签符合ISSO180000-6C标准,内储存存该工件的编编号及工件名名称、重量、基基本尺寸等信信息。工件分为4种,形形状均如图33所示,直径径有80mmm和60mm两种种,每一种分分为红蓝两色色,具体为红红色大直径工工件9个(编编号1-9)、红色小直径工件9个(编号10-18)、蓝色大直径工件6个(编号19-24)、蓝色小直径工件6个(编号25-30)。每个工件底部均开有圆孔,小直径工件可以叠加在大直径工件上。图4 工件(7)仓库门:场地上有22扇仓库门,机机器人必须通通过仓库门
6、进进入或者离开开仓库。(8)关键点:在场地上共共有4个关键键位置,前33个关键点代代号分别是555、81、189,关键点4选选取绿灯亮者者所在点(即即1组绿灯亮亮,关键点代代号96;22组绿灯亮,关关键点代号995;3组绿绿灯亮,关键键点代号944),如图11中标注红色圆点点处(注意:实际场地上上并没有红点点),当机器器人运行经过过这些关键点点时,需要将将位置信息上上传给场边电电脑。所有比赛道具的的图纸另外发发布,各参赛赛学校可以根根据图纸自行行制作,也可可以向大赛合合作企业购买买。2.比赛机器人人大赛的机器人设设备由机器人人平台、机器器人上部机构构、RFIDD读写器、ZZIGBEEE无线模块
7、、监监控软件组成成,其中机器器人上部机构构需要参赛队队自行开发。每每个参赛队使使用2台机器器人,每队机机器人总重不不超过50公公斤。(1)机器人平平台:使用北北京中科远洋科技技有限公司的的A200型型机器人平台台,组成如图图5所示,参加加过20111年全国技能能大赛机器人人项目的学校校可以继续使使用原来的AA200平台台。机器人平台在使使用中必须遵遵守以下几点点平台使用规规范:指定的机器人平平台除了铝板板可以拆卸外外,其余所有有部件需要更更换时必须使使用同型号、同同规格的产品品。机器人平台的电电池、巡线传传感器信号处处理板、主控控制板、电机机驱动板、巡巡线传感器可可根据上部机机械机构及整整体设
8、计需求求改变安装位位置,平台的的车轮、万向向轮安装位置置可以前后移移动。机器人的供电全全部来自于指指定的三块电电池,不能使使用另外的供供电方式。机器人的行走必必须使用所提提供的主控制制器控制。机器人的运行必必须依靠平台台所提供的巡巡线传感器。图5 A2000机器人平平台组成每个参赛队必须须使用大赛组组委会指定的的机器人平台台,否则不得得参加比赛,在在此基础上自自行设计机器器人参加比赛赛,对指定的的机器人平台台所做的改动动必须符合“机器人平台台使用规范”的要求,否否则不得参加加比赛,成绩绩以0分计。(2)机器人上上部机构: 由参赛队根根据比赛任务务自行设计制制作。 (3)RFIDD读写器:读读写
9、器通过RRS232与与机器人平台台主控制板通通讯,必须符符合ISO 180000-6C标准。大赛使使用北京中科科远洋科技有有限公司的ZKRR6806M型嵌入式超高高频读写模块块。 (4)ZIGBBEE无线通通讯模块:用用于机器人与与场边电脑以以及机器人之之间的相互通通讯。大赛使使用北京中科科远洋科技有有限公司的ZKM101型。 (5)监控软件件:监控软件件采用北京中中科远洋科技技有限公司开开发的ZK33D-RObbotCADD1.0版机机器人状态实时监控控软件,软件件安装在场边边电脑上,由裁裁判操作,采采集并显示机机器人发来的的信息,软件件使用VS22008.NNET开发平平台,参赛队队需要将
10、机器人运行行的信息上传传给场边电脑脑,机器人与与场边电脑监监控软件之间间的通讯程序序由参赛队根根据公布的通通讯协议编写写,机器人与场场边电脑监控控软件之间的的通讯协议见见附件。监控软件拥有功功能:比赛开始时,由由裁判下发抓抓取工件任务务(需要抓取取的工件编号号,每一台机机器人指定44个工件)、下下发工件装配配任务(工件件在装配台上上安放位置)、下下发交通灯控控制命令、下下发机器人启启动命令。接受机器人上上传的信息,显显示当前车载载工件数量、实实时更新货架架情况、实时时更新装配区区工件情况。接受机器人上上传的信息,在在场地图上实实时显示机器器人关键点位置信信息。四、竞赛规则(一)任务要求求1.裁
11、判使用场场边电脑向机机器人发出启启动指令,并并下发任务。2.机器人出发发后,通过入入库门进入仓仓库;3.仓库中的货货架上共有330个工件,每每个工件上贴贴有RFIDD标签,型号:ZKKRI10666D,具有有唯一的信息息,每个队从从30个工件件中,抓取88个指定编号号的工件,由由2台机器人人共同完成,工工件放在机器器人上;同时时,机器人将将采集到的工工件信息以及及在货架上的的位置信息发发送给场边电电脑。每个队2台机器器人,1号机机器人指定抓抓取2个红色色大直径工件件和2个蓝色色小直径工件件,2号机器器人指定抓取取2个蓝色大大直径工件和和2个红色小小直径工件。工件在货架中的的摆放原则:(1)货架
12、A、BB、C、D、EE中每个货架架至少有1个个指定抓取的工工件;(2)每个机器器人指定抓取取的4个工件件分布在货架架A、B、CC、D、E中中4个货架;4.机器人通过过出库门离开仓仓库。5.在仓库与装装配区之间有有3条道路,机机器人接受红红绿灯信息,从从亮着绿灯的的道路上通过过,前往装配配区。6.在装配区,机机器人按照指指定的工件装装配要求,将将工件放置在在装配台上,并并将放置信息息发送给场边边电脑。装配时,每个装装配台放置22个工件,要要求:(1)同一种颜颜色的工件装装配在一起,大大直径工件在在下,小直径径工件在上;(2)每个装配配台所需要放放置的工件颜颜色在比赛开开始时,通过过场边电脑下下发
13、给机器人人;(3)相同颜色色的装配台成成对角分布。7.机器人在场场上运行时,经经过场上关键键点时,将机机器人位置信信息发送给场场边电脑。(二)竞赛时长长:任务完成成15分钟。(三)机器人要要求1.每台机器人人由队员启动动后必须是自自主运动。2.比赛开始后后,由裁判给给机器人下达达启动指令,所所有自动机器器人可以依次次启动,但是是必须在500秒以内全部部启动完毕,超超过50秒后后,没有启动动的机器人再再次启动必须须申请重试。3.所有机器人人在出发区放放置完毕后,操操作机器人的的队员必须立立即退出赛地地,站在木质质围栏外。4.一旦机器人人启动,参赛赛队员不得接接触机器人。5.启动前,所所有自动机器
14、器人在启动区区内必须纳入入1000mmm长、1000mmm宽、15000mm高的空空间范围,机机器人所有部部件在水平投投影的任何方方向上都不能能超出启动区区。6.启动后,自自动机器人的的尺寸和形状状可以改变,但但高度限制在在2000mmm以内,任任意时刻瞬时宽宽度不能超过过1500mmm。(在水水平投影的任任何方向上测测量都应符合合此要求)7.比赛一旦开开始,自动机机器人不允许许分离。机器人在场上发发生故障时,为为保护机器人人,参赛队员员可以向裁判判申请关闭机机器人电源,但但是关闭电源源后,机器人人在场上的位位置不允许改改变。(四)机器人的的重试1.每场比赛每每队允许多次次“重试”。2.“重试
15、”的的申请被裁判判允许后,参参赛队员必须须把机器人搬搬回到机器人人启动区,并并尽快启动(允允许人工启动动),允许重重试的机器人人必须符合上上述机器人的的规定。3.“重试”时时,机器人的的任何部件均均不能更换,机机器人的能源源也不能补充充或增加,机机器人已经抓抓取的工件可可以继续放在在机器人上。4.当“重试”违反规则时时,由裁判做做出裁决,包包括“重试”是否有效。5.重试的时间间是30秒钟钟,从队员入入场接触到任任何一台要重重试的机器人人开始计时。330秒内没有有启动的机器器人将被留在在启动区。(五)能源1.比赛期间各各队应为自己己的所有机器器人准备能源源。2.允许使用的的电源电压不不得超过24
16、4VDC。3.压缩空气的的压强应小于于0.8MPPa,每台机机器人所用气气瓶的总容积积不应超过11.5L。4.不允许使用用组委会认为为危险和不适适当的能源。(六)重量所有机器人包括括能源和机器器人其他部件件都必须在赛赛前称重,每每个队用于整整个比赛的所所用的机器人人总重不得超超过50.000kg,否否则,不得参参加比赛,成成绩以0分计计。五、评分方式与与奖项设定(一)评分方式式参赛队的成绩由由上部机构设设计分(占总总分5%)、职职业素养分(占占总分5%)、和任务得分(占总分90%)组成。1.上部机构设设计分评分方方法(1)上部机构构设计分满分分为5分。(2)上部机构构设计分由该该场比赛裁判判按
17、照机构设设计的自创性性、先进性、合合理性、稳定定性和经济环环保、可拓展展性等因素进进行评定。2.职业素养分分评分方法(1)职业素养养分满分为55分。(2)职业素养养分由该场比比赛裁判按照照参赛队以下下方面表现进进行评定:公平竞赛,遵守守赛场纪律。遵守操作规程,安安全、文明参参赛。冷静、高效,分分工合作,一一丝不苟。着装规范整洁,爱爱护设备,保保持竞赛环境境清洁有序。抗工作环境干扰扰能力强、善善于与裁判沟沟通。3.任务得分(1)任务得分分满分为90分。(2)机器人接接受场边电脑脑指令后启动动,得1分/机器人人。(3)机器人从从仓库入口进进入仓库,得得1分/机器人人。(4)每个参赛赛队需要从比比赛
18、场地上的的货架上鉴别别并抓取8个指指定的工件,放在机器人上,3.5分/工件;向电脑上传工件信息正确,1分/工件;上传工件在货架中位置信息正确,0.5分/工件。(5)机器人从从仓库出口离离开仓库,得得2分/机器人人。(6)机器人前前往装配区时时,正确感知知途中路线情情况,从绿灯灯处通过,得得3分/机器器人。(7)机器人进进入装配区,按按照正确顺序序将工件放置置在装配台上上,得3.55分/工件;若安装顺序序不正确,得得1分/个;若没有放置置在装配台上上,但是工件件的投影面全全部进入了装装配区,得00.5分/个个;向电脑上上传装配台工工件位置信息息正确,得0.5分/工工件。若工件与机器人人接触,则不
19、不得分。(8)机器人在在场地运行时时,将经过的的4个关键点点位置发送给给电脑,并正正确显示机器器人位置信息息,得0.55分/点。4.违规扣分选手有下列情形形,需从比赛赛成绩中扣分分:(1)机器人若若抓取了指定定给另一台机机器人的工件件,则扣2分分/工件;(2)在完成工工作任务的过过程中,因操操作不当破坏坏赛场提供的的设备,视情节扣55-10分;(3)出现污染染赛场环境,工工具遗忘在赛赛场等不符合合职业规范的的行为,视情情节扣3-6分。5.成绩评定方方式比赛成绩按照总总得分从高到到底排列,若若总得分相同同,则按照完完成任务的得得分排名,得得分高的队伍伍排名在前;若得分相同同,则按照完完成任务的时
20、时间排名,用用时少的队伍伍排名在前;若用时相同同,则由裁判判组综合评定定。(二)奖项设定定竞赛设参赛选手手团体奖,一一等奖占比110%,二等等奖占比200%,三等奖奖占比30%。获得一等奖的参参赛队指导教教师由组委会会颁发优秀指指导教师证书书。六、安全1.制成的所有有机器人均不不能对操作者者、裁判、比比赛工作人员员、观众、对对方的设备和和比赛场地造造成伤害。2.为了保证安安全,机器人人电源电压不不超过24VV,如果使用用激光束,必必须低于2级级激光,并以以不伤害任何何操作者、裁裁判、比赛工工作人员、观观众、对方的的设备和比赛赛场地的方式式使用。七、申诉与仲裁裁(一)申诉1.参赛队对不不符合竞赛
21、规规定的设备、工工具、软件,有有失公正的评评判、奖励,以以及对工作人人员的违规行行为等,均可可提出申诉。 2.申诉应在竞竞赛结束后22小时内提出出,超过时效效将不予受理理。申诉时,应应按照规定的的程序由参赛赛队领队向相相应赛项仲裁裁工作组递交交书面申诉报报告。报告应应对申诉事件件的现象、发发生的时间、涉涉及到的人员员、申诉依据据与理由等进进行充分、实实事求是的叙叙述。事实依依据不充分、仅仅凭主观臆断断的申诉将不不予受理。申申诉报告须有有申诉的参赛赛选手、领队队签名。3.赛项仲裁工工作组收到申申诉报告后,应应根据申诉事事由进行审查查,6小时内内书面通知申申诉方,告知知申诉处理结结果。如受理理申诉
22、,要通通知申诉方举举办听证会的的时间和地点点;如不受理理申诉,要说说明理由。4.申诉人不得得无故拒不接接受处理结果果,不允许采采取过激行为为刁难、攻击击工作人员,否否则视为放弃弃申诉。申诉诉人不满意赛赛项仲裁工作作组的处理结结果的,可向向大赛赛区仲仲裁委员会提提出复议申请请。(二)仲裁大赛采用两级仲仲裁机制。赛赛项设仲裁工工作组,赛区区设仲裁委员员会。赛项仲仲裁工作组接接受由代表队队领队提出的的对裁判结果果的申诉。大大赛执委会办办公室选派人人员参加赛区区仲裁委员会会工作。赛项项仲裁工作组组在接到申诉诉后的2小时时内组织复议议,并及时反反馈复议结果果。申诉方对对复议结果仍仍有异议,可可由省(市)
23、领领队向赛区仲仲裁委员会提提出申诉。赛赛区仲裁委员员会的仲裁结结果为最终结结果。八、备注本规则解释权归归机器人项目目专家组。 “2012年年全国职业院院校技能大赛赛”高职组机器人赛赛项技术规范范一、赛场环境(一)比赛用场场馆比赛场馆分为正正式场地和准准备场地。1.正式比赛场场地比赛场馆需要大大约16000-20000平方米空间间,需要提供供足够的的灯灯光设备。包包括一些以下下部分:(1)6米*88米的正式比比赛场地2个。(2)大屏幕计计时装置,用用于倒计时。2.比赛准备场场地主要用于参赛队队机器人的准准备、维修、调调试场地。每每个参赛队拥拥有一个大约约9平方米的安安装工位,内内部配有电源源5孔
24、插座11个,参赛队队标牌。(二)比赛场地地及道具1.场地示意图图2.比赛场地规规格比赛在方形场地地(60000mm8000mmm)上进行行,场地四周周有木质围栏栏(高1000mm,厚30mmm)。比赛场地的地板板是20mmm厚的木板,刷刷乳胶漆。3.比赛道具(1)货架:分分为单面货架架1个(3号号货架,上下下2层,可以以存放6个工工件);双面面货架2个(11号和2号货货架,上下22层,分别可可以存放122个工件);1号货架存存放位置编号号A1-A66、B1-BB6,2号货货架存放位置置编号C1-C6、D11-D6,33号货架存放放位置编号EE1-E6。(2)出发区:机器人正式式启动前所停停泊的
25、区域,大大小为1000mmm*1000mmm。(3)交通灯:3组交通灯灯,每一组交交通灯有红绿绿2盏交通灯灯。比赛时,22组亮红灯,11组亮绿灯,机机器人必须从从绿灯下的道道路通过。比比赛开始后,安安装在框架上上的交通灯控控制器将3组组交通灯亮灯灯情况以无线线通讯方式发发送给机器人人。(4)装配台:共有4个装装配台,编号号从0A-0D,在在场地上按照照顺时针摆放放,机器人在在此处将携带带的工件根据据任务中规定定的要求进行行堆放。每个个装配台周围围有一个5000mm*500mmm的装配区。(5)工件:使使用尼龙,330个工件,每每个工件均贴贴有RFIDD标签,RFFID标签符符合ISO11800
26、0-6C标准,内内储存该工件件的编号及工工件名称、重重量、基本尺尺寸等信息。工件分为4种,形形状均如图33所示,直径径有80mmm和60mm两种种,每一种分分为红蓝两色色,具体为红红色大直径工工件9个(编编号1-9)、红红色小直径工工件9个(编编号10-118)、蓝色色大直径工件件6个(编号号19-244)、蓝色小小直径工件66个(编号225-30)。每每个工件底部部均开有圆孔孔,小直径工工件可以叠加加在大直径工工件上。(6)仓库门:场地上有22扇仓库门,机机器人必须通通过仓库门进进入或者离开开仓库。(7)关键点:在场地上共共有4个关键键位置,前33个关键点代代号分别是555、81、1189,
27、关键键点4选取绿绿灯亮者所在在点(即1组组绿灯亮,关关键点代号996;2组绿绿灯亮,关键键点代号955;3组绿灯灯亮,关键点点代号94),如如图1中标注注红色圆点处处(注意:实实际场地上并并没有红点),当当机器人运行行经过这些关关键点时,需需要将位置信信息上传给场场边电脑。二、竞赛设备技技术平台(一)机器人平平台赛项机器人平台台使用北京中中科远洋科技技有限公司的的A200型型自动机器人人平台,框架架大小为6000mm350mmm。A200机器人人平台配备22台额定电压压24VDCC、150转转/分的直流流减速电机以以及16路巡巡线传感器、巡巡线传感器信信号处理板、主主控制板、电电机驱动板;提供
28、完整的的机器人巡线线算法以及运运行控制程序序,可以依靠靠地面白条实实现在比赛场场地全场范围围内的运动、定定位;主控制制板提供充足足的I/O接接口,可以供供参赛队使用用。机器人平平台的所有技技术全部向参参赛队开放。机器人平台主要要作为参赛机机器人的运动动底盘,参赛赛队根据大赛赛任务的要求求,在此平台台上进一步设设计制作各种种抓取、投放放机构,利用用机器人平台台提供的主控控制板和编程程算法实现整整体机器人的的控制。(二)比赛用器器材1.6米*8米米的比赛场地地:数量2;2.货架:双面面货架2个,单单面货架1个个;3.装配台:采采用有机玻璃璃,数量4。4.工件:采用用尼龙,数量30,其其中红色大型型
29、(直径800mm)9个个,红色小型型(直径600mm)9个个,蓝色大型型6个,蓝色色小型6个。5.交通灯:33组,每一组组包括1个交交通灯座和22个交通灯(红红绿各1个)。6.交通灯控制制器:1个。7.交通灯门框框:采用铝合合金型材,数数量1。8. 仓库门:采用铝合金金型材,数量量2。9. 耗材:330mm宽的的单面胶(白白条)、红色色贴纸。10.监控软件件:1套,监监控软件采用用北京中科远远洋科技有限限公司开发的的ZK3D-RObottCAD1.0版机器人人状态实时监监控软件,软软件安装在场场边电脑上,由由裁判操作,向向机器人下发发比赛任务,采采集并显示机机器人发来的的信息,软件件使用VS2
30、2008.NNET开发平平台,参赛队队需要将机器器人运行的信信息上传给场场边电脑,机机器人与场边边电脑监控软软件之间的通通讯程序由参参赛队根据公公布的通讯协协议编写,机机器人与场边边电脑监控软软件之间的通通讯协议见附附件11.测试仪器器:台式电脑脑、优利德万用表表、优利德示波器器(含频率计计)。12.精密电子子秤1台:最最大称重1000kg,精精确到小数点点后2位。 “2012年年全国职业院院校技能大赛赛”高职组机器人赛赛项须知一、参赛队须知知1.参赛队选手手在报名获得得确认后,原原则上不再更更换,如筹备备过程中,选选手因故不能能参赛,所在在学校需出具具书面说明并并按相关参赛赛选手资格补补充人
31、员并接接受审核;竞竞赛开始后,参参赛队不得更更换参赛选手手,允许队员员缺席比赛。2.参赛队自带带计算机、竞竞赛设备、设设备附件和工工具等,但不不能使用存在在不安全因素素的工具;大大赛统一提供供每队一路电电源,提供一一定数量计算算机和仪器设设备作为参赛赛队应急使用用。3.参赛队使用用的所有机器器人及部分工工具自己用货货运卡车运到到承办校;也也可以装在木木质包装箱内内,使用中铁铁快运运到承承办校,每个个参赛队最多多使用2个包包装箱,包装装箱尺寸限制制在2米(长)1米(宽)1米(高)内内,并张贴带带有参赛队自自己印记的封封条。 4.各参赛队需需要与当地中中铁快运联系系机器人发货货时间,机器器人包装箱
32、必必须在指定时时间运抵承办办校,若不能能及时运到,由由此产生的后后果由参赛队队自己承担。5.参赛队在规规定的时间将将机器人从包包装箱或者货货运卡车上运运到比赛安装装工位,在安安装工位上组组装、调试机机器人。6.正式比赛前前,各参赛队队应在规定的的时间段按照照比赛顺序进入入正式赛场试试运行。入场场前,参赛队队的所有机器器人必须先在在规定的位置置称重,经大大赛执行组确确认的电子秤秤所得出的结结果为唯一认认可的结果,参参赛队与裁判判员一起签字字确认称重结结果,若参赛赛队所有机器器人总重超过过50.000公斤,则不不得入场。7.参赛队携带带机器人到达达比赛场地后后,必须服从从工作人员指指挥。8.参赛队
33、入场场后,参赛队队员必须检查查确认大赛赛赛项组委会提提供的比赛器器材,并调试试其机器人,在在调试期间,裁裁判会检查参参赛队是否使使用了指定平平台,对平台台的修改是否否符合规程的的规定;参赛赛队必须向裁裁判展示机器器人的所有功功能、动作,并并由裁判详细细检查是否超超过规程允许许的尺寸范围围。9.正式比赛,参参赛队每次入入场时,参赛赛队所有机器器人需要再次次称重,参赛赛队与裁判员员一起签字确确认称重结果果,若参赛队队所有机器人人总重超过550.00公公斤,则不得得入场。10.每场正式式比赛前,有有一个3分钟准备时时间,前2分钟,参赛赛队将自己的的所有机器人人搬入启动区区,放置好本本队的机器人人,打
34、开机器器人的电源,与裁判电脑和交通灯控制器上的ZIGBEE模块组网,参赛队员退出场外;后1分钟,裁判通过上位机向机器人发布比赛任务;准备时间结束,主裁判吹哨,裁判向机器人发送启动指令,比赛正式开始。机器人全部启动后,2名参赛队员站在主裁判身边。11.每场比赛赛结束后,参参赛队与裁判判员一起签字字确认比赛结结果。12.参赛队对对大赛组委会会以后发布的的所有文件都都要仔细阅读读,确切了解解大赛时间安安排、评判细细节等,以保保证顺利参加加大赛。13.对于本规规则没有规定定的行为,裁裁判组有全权权做出裁决。在在有争议的情情况下,裁判判的裁决是最最终裁决,任任何媒体资料料都不做参考考。14.对规则的的任
35、何修改将将由组委会以以“常见问题FFAQ”的形式发布布。15.鼓励所有有参赛队以自自己的方式装装饰自己的机机器人。16.竞赛所用用的平台统一一由赛项组委委会及主办方方提供,不得得使用非指定定平台,如有有违反,以舞舞弊论处,取取消该队参赛赛资格。17.本规程中中未说明的道道具重量和尺尺寸的允许误误差均为5%。18.本竞赛项项目的解释权权归大赛组委委会。二、指导教师须须知1.每个参赛队队可配主、副副指导教师各各一名,指导导教师经报名名、审核后确确定,一经确确定不得更换换。允许指导导教师缺席比比赛。2.在比赛准备备阶段,指导导教师可以对对本队准备的的进展进行检检查与督促,给给出改进与补补救措施的建建
36、议,但仅限限于口头,禁禁止操作任何何与比赛有关关的工具和设设备。3.在正式比赛赛阶段,不允许指导教师师上场指导。4.参赛队员有有权选择或放放弃教师指导导。三、竞赛选手须须知1.参赛选手应应严格遵守赛赛场规章、操操作规程和工工艺准则,保保证人身及设设备安全,接接受裁判员的的监督和警示示,文明竞赛赛。2.选手凭证入入场,在赛场场内操作期间间要始终佩带带参赛凭证以以备检查。3.上场比赛期期间,选手禁禁止携带使用用通讯工具。4.比赛准备阶阶段时,各参参赛队自行决决定分工、工工作程序和时时间安排,在在指定赛位上上完成竞赛准准备工作。5.竞赛过程中中,因严重操操作失误或安安全事故不能能进行比赛的的(例如因
37、所所设计的电路路板发生短路路导致机器人人起火的),现现场裁判员有有权中止该队队比赛。6.比赛准备阶阶段,参赛选选手在安装工工位内活动,不不得影响其他他参赛队的工工作、不得进进入其他参赛赛队的工作区区域,违者取取消参赛队比比赛资格。7.参赛选手在在安装工位内内修理、调试试机器人时,不不能破坏准备备场地内的任任何器材和地地面,否则取取消参赛队比比赛资格。8.在参赛期间间,选手应当当注意保持工工作环境及设设备摆放符合合企业生产“5S”的原则。四、赛场管理须须知1.竞赛现场设设现场裁判组组,负责监督督检查参赛队队安全有序竞竞赛。如遇疑疑问或争议,须须请示裁判长长,裁判长的的决定为现场场最终裁定。2.裁
38、判工作实实行回避制度度。有组队参参加竞赛的院院校,其教师师不得参加裁裁判工作。3.参赛队进入入赛场,裁判判员及赛场工工作人员应按按规定审查允允许带入赛场场的物品,经经审查后如发发现不允许带带入赛场的物物品,交由参参赛队随行人人员保管,赛赛场不提供保保管服务。五、赛场纪律符符合下列情形形之一的参赛赛队,经裁判判组裁定后取取消其比赛资资格:1.不服从裁判判、工作人员员、扰乱赛场场秩序、干扰扰其他参赛队队比赛情况,裁裁判组应提出出警告。累计计警告2次,或或情节特别严严重,造成竞竞赛中止的,经经裁判长裁定定后,中止比比赛,并取消消参赛资格和和竞赛成绩。2.竞赛过程中中,产生重大大安全事故、或或有产生重
39、大大安全事故隐隐患,经裁判判员提示无效效的,裁判员员可停止其比比赛,并取消消参赛资格和和竞赛成绩。附件1机器人与场边电电脑通信协议议一、适用范围适用于机器人与与上位机之间间的相互通讯讯。二、物理接口 通讯方方式:串行RRS232传输速率:96600字符格式:1个个起始位、88位数据位、11位停止位、无无校验。三、帧1.帧结构帧结构如图所示示,每帧内容容包括:地址址1BYTEE,功能号11BYTE,数数据nBYTTE,校验22BYTE,通通讯帧以HEEX码传送,有有效的数据范范围为00HHFFH。地址功能码数据数量数据1数据nCRC低CRC高2.地址(ADDDR)参赛队机器人的的代号,范围围为1
40、-2000可设。3.功能号相关命令代码。4.数据数量数据单元的长度度。5.数据根据不同的命令令,具体的数数据。6.校验采用CRC校验验四、命令解释1.下发抓取工工件命令帧格格式字段值字段说明XXH机器人地址03功能码 0304H数据长度XX工件编号XX工件编号XX工件编号XX工件编号CRCCRC低字节CRC高字节注:1.每一台台机器人指定定4个工件。2.工件编号是是从01H-1EH中任任意一个。例如:发送:001 03 04 022 03 11D 1E 82 D33 回回应:01 A3 044 02 003 1D 1E 9AA 73 发发送:02 03 044 0A 0B 13 144 B6
41、116 回回应:02 A3 044 0A 0B 13 144 AE BB6机器人应答帧格格式:字段值字段说明XXH机器人地址A3功能码 A304H数据长度XX工件编号XX工件编号XX工件编号XX工件编号CRCCRC低字节CRC高字节2.下发装配台台安装任务字段值字段说明XXH机器人地址04功能码 0404H数据长度XX装配台1颜色XX装配台2颜色XX装配台3颜色XX装配台4颜色CRCCRC低字节CRC高字节机器人应答帧格格式:字段值字段说明XX机器人地址A4功能码 A404H数据长度XX装配台1颜色XX装配台2颜色XX装配台3颜色XX装配台4颜色CRCCRC低字节CRC高字节注:1.装配任任务
42、向每个参参赛队的2台台机器人同时时下发。机器器人自己协调调装配顺序。2.红色用AAAH表示,蓝蓝色用55HH表示。例如:发送:001 04 04 555 55 AAA AA 04 877 回回应:01 A4 044 55 555 AA AA 1CC 27 发发送:02 04 044 55 555 AA AA 377 87 回回应:02 A4 044 55 555 AA AA 2FF 273.下发启动命命令字段值字段说明XX机器人地址05功能码 0502H数据长度XXH命令高位XXL命令低位CRCCRC低字节CRC高字节 机器器人应答帧格格式:字段值字段说明XX机器人地址A5功能码 A502H数
43、据长度XXH命令高位XXL命令低位CRCCRC低字节CRC高字节注:1.启动:命令高位与与低位均为000H。例:发送:011 05 002 00 00 B88 CC 回应:01 A5 02 000 00 99A CC4.机器人实时时位置信息上上传(机器人人主动发送)字段值字段说明XX上位机地址06功能码 0602H数据长度XX1#数据(机器器人地址)XX2#数据CRCCRC低字节CRC高字节注:1.地址为为上位机地址址:0F0H。2.1#数据:发送信息的的机器人地址址 2#数据:地图上关键键点的编号。44个关键点位位置代号377H、51H、5EH(或或者5FH、660H)、BDH。上位机应答帧
44、格格式:字段值字段说明XX地址(机器人地地址)A6功能码 A601H数据长度XX2#数据CRCCRC低字节CRC高字节注:应答的数据据为机器人上上传的2#数数据。例如:发送:FF0 06 02 011 37 885 1B 回回应:01 A6 011 37 AA1 BD 发发送:F0 06 022 01 551 05 31 回回应:01 A6 011 51 221 97 发发送:F0 06 022 01 55E 45 35 回应应:01 AA6 01 5E 611 93 发发送:F0 06 022 01 BBD 04 BC 回回应:01 A6 011 BD 220 1A5.机器人抓取取工件后,工
45、工件信息上传传(机器人主主动发送)字段值字段说明XX上位机地址07功能码 0706H数据长度XX1#数据(机器器人地址)XX2#数据XX3#数据 XX4#数据 XX5#数据XX6#数据CRCCRC低字节CRC高字节注:1.地址为为上位机地址址:0F0H。2.1#数据:发送信息的的机器人地址址 2#数据:货架上存放放位置编号,AA1-A6、BB1-B6、CC1-C6、DD1-D6、EE1-E6 3#数据:抓取的工件件编号 4#数据:从RFIDD中读取的工工件名称信息息。 5#数据:从RFIDD中读取的工工件重量信息息。 6#数据:从RFIDD中读取的工工件基本尺寸寸信息。 3.机机器人每次从从货
46、架上取出出1个工件,就就实时上传信信息。上位机应答帧格格式:字段值字段说明XX地址(机器人地地址)A7功能码 A705H数据长度XX2#数据 XX3#数据 XX4#数据XX5#数据XX6#数据CRCCRC低字节CRC高字节注:应答的数据据为机器人上上传的2#-6#数据。例如:发送:FF0 07 06 011 A1 001 0A 96 50 DBB 78 回回应: 011 A7 05 AA1 01 0A 96 50 A4 E36.机器人装配配台安放工件件位置信息上上传(机器人人主动发送)字段值字段说明XX上位机地址08功能码 0803H数据长度XX1#数据(机器器人地址)XX2#数据XX3#数据
47、 CRCCRC低字节CRC高字节注:1.地址为为上位机地址址:0F0H。2.1#数据:发送信息的的机器人地址址 2#数据:装配台编号号,A1-DD2H。(共共有A1、AA2、B1、BB2、C1、CC2、D1、DD2共8个位位置) 3#数据:工件编号,001-1EHH。 3.机机器人每次将将一个工件在在装配台上安安放完毕,就就实时上传信信息。上位机应答帧格格式:字段值字段说明XX地址(机器人地地址)A8功能码 A802H数据长度XX2#数据 XX3#数据 CRCCRC低字节CRC高字节注:应答的数据据为机器人上上传的2#-3#数据。例如:发送:FF0 08 03 01 AA2 01 1CC 0E
48、 回回应:01 A8 02 AA2 01 200 C0 发发送:F0 08 033 02 A1 0F 6D 3A 回回应:02 A8 02 AA1 0F E5 F4 发发送:F0 08 033 02 CC2 13 44 033 回回应:02 A8 02 CC2 13 CC CDD 发发送:F0 08 033 02 CC1 19 CC4 F4 回回应:02 A8 02 CC1 19 4C 3A7.交通灯控制制器向机器人人下发红绿灯灯命令字段值字段说明F4广播地址09功能码 0902H数据长度XXH命令高位XXL命令低位 CRCCRC低字节CRC高字节注:1.命令高高位:0AHH,命令低位位:01
49、-003H,分别别代表第1-第3组绿灯灯亮。 2.此此命令以广播播形式发送,不不需要机器人人回应,比赛赛开始时,将将连续发送55次。例如:发送:FF4 09 02 0AA 01 F0 E9 crc校验的cc程序(全)/ 计算算16位CRRC函数之一一/BYTTE aucchCRCHHi=/ CRRC值的高字字节列表0 xx00, 00 xC1, 0 x81, 0 x400, 0 x001, 0 xxC0, 00 x80, 0 x41, 0 x011, 0 xCC0, 0 xx80, 00 x41, 0 x00, 0 xC11, 0 x881,0 x440, 0 xx01, 00 xC0, 0
50、x80, 0 x411, 0 x000, 0 xxC1, 00 x81, 0 x40, 0 x000, 0 xCC1, 0 xx81, 00 x40, 0 x01, 0 xC00,0 x800, 0 x441, 0 xx01, 00 xC0, 0 x80, 0 x411, 0 x000, 0 xxC1, 00 x81, 0 x40, 0 x000, 0 xCC1, 0 xx81, 00 x40, 0 x01,0 xC0, 0 x800, 0 x441, 0 xx00, 00 xC1, 0 x81, 0 x400, 0 x001, 0 xxC0, 00 x80, 0 x41, 0 x011, 0
51、 xCC0, 0 xx80, 00 x41,00 x00, 0 xC1, 0 x811, 0 x440, 0 xx01, 00 xC0, 0 x80, 0 x411, 0 x000, 0 xxC1, 00 x81, 0 x40, 0 x000, 0 xCC1, 0 xx81,0 xx40, 00 x01, 0 xC0, 0 x800, 0 x441, 0 xx00, 00 xC1, 0 x81, 0 x400, 0 x001, 0 xxC0, 00 x80, 0 x41, 0 x011, 0 xCC0,0 x880, 0 xx41, 00 x00, 0 xC1, 0 x811, 0 x440,
52、 0 xx00, 00 xC1, 0 x81, 0 x400, 0 x001, 0 xxC0, 00 x80, 0 x41, 0 x011,0 xC00, 0 x880, 0 xx41, 00 x00, 0 xC1, 0 x811, 0 x440, 0 xx01, 00 xC0, 0 x80, 0 x411, 0 x000, 0 xxC1, 00 x81, 0 x40,0 x00, 0 xC11, 0 x881, 0 xx40, 00 x01, 0 xC0, 0 x800, 0 x441, 0 xx01, 00 xC0, 0 x80, 0 x411, 0 x000, 0 xxC1, 00 x8
53、1,00 x40, 0 x00, 0 xC11, 0 x881, 0 xx40, 00 x01, 0 xC0, 0 x800, 0 x441, 0 xx00, 00 xC1, 0 x81, 0 x400, 0 x001, 0 xxC0,0 xx80, 00 x41, 0 x01, 0 xC00, 0 x880, 0 xx41, 00 x00, 0 xC1, 0 x811, 0 x440, 0 xx00, 00 xC1, 0 x81, 0 x400, 0 x001,0 xCC0, 0 xx80, 00 x41, 0 x01, 0 xC00, 0 x880, 0 xx41, 00 x00, 0 x
54、C1, 0 x811, 0 x440, 0 xx01, 00 xC0, 0 x80, 0 x411,0 x000, 0 xCC1, 0 xx81, 00 x40, 0 x00, 0 xC11, 0 x881, 0 xx40, 00 x01, 0 xC0, 0 x800, 0 x441, 0 xx00, 00 xC1, 0 x81,0 x40, 0 x011, 0 xCC0, 0 xx80, 00 x41, 0 x01, 0 xC00, 0 x880, 0 xx41, 00 x00, 0 xC1, 0 x811, 0 x440, 0 xx01, 00 xC0,00 x80, 0 x41, 0 x
55、000, 0 xCC1, 0 xx81, 00 x40, 0 x00, 0 xC11, 0 x881, 0 xx40, 00 x01, 0 xC0, 0 x800, 0 x441, 0 xx01,0 xxC0, 00 x80, 0 x41, 0 x000, 0 xCC1, 0 xx81, 00 x40, 0 x00, 0 xC11, 0 x881, 0 xx40, 00 x01, 0 xC0, 0 x800, 0 x441,0 x000, 0 xxC1, 00 x81, 0 x40, 0 x011, 0 xCC0, 0 xx80, 00 x41, 0 x01, 0 xC00, 0 x880,
56、0 xx41, 00 x00, 0 xC1, 0 x811,0 x400;BYTEE auchhCRCLoo = / CCRC值的低低字节列表 0 x00, 0 xC00, 0 xCC1, 0 xx01, 00 xC3, 0 x03, 0 x022, 0 xCC2, 0 xxC6, 00 x06, 0 x07, 0 xC77, 0 x005, 0 xxC5, 00 xC4,00 x04, 0 xCC, 0 x0CC, 0 x00D, 0 xxCD, 00 x0F, 0 xxCF, 00 xCE, 0 x0E, 0 x0AA, 0 xCCA, 0 xxCB, 00 x0B, 0 xC9, 0 x
57、099,0 x088, 0 xCC8, 0 xxD8, 00 x18, 0 x19, 0 xD99, 0 x11B, 0 xxDB, 00 xDA, 0 x1A, 0 xx1E, 00 xDE, 0 xDF, 0 x1FF, 0 xDDD,0 x11D, 0 xx1C, 0 xxDC, 00 x14, 0 xD4, 0 xD55, 0 x115, 0 xxD7, 00 x17, 0 x16, 0 xD66, 0 xDD2, 0 xx12, 00 x13, 0 xD3,0 x11, 0 xD11, 0 xDD0, 0 xx10, 00 xF0, 0 x30, 0 x311, 0 xFF1, 0
58、xx33, 00 xF3, 0 xF2, 0 x322, 0 x336, 0 xxF6, 00 xF7,00 x37, 0 xF5, 0 x355, 0 x334, 0 xxF4, 00 x3C, 0 xxFC, 00 xFD, 0 x3D, 0 xFFF, 0 x33F, 0 xx3E, 00 xFE, 0 xFA, 0 x3AA,0 x3B, 0 xFBB, 0 x339, 0 xxF9, 00 xF8, 0 x38, 0 x288, 0 xEE8, 0 xxE9, 00 x29, 0 xEB, 0 x2BB, 0 x22A, 0 xxEA, 00 xEE,00 x2E, 0 x2F, 0
59、 xxEF, 00 x2D, 0 xED, 0 xECC, 0 x22C, 0 xxE4, 00 x24, 0 x25, 0 xE55, 0 x227, 0 xxE7, 00 xE6, 0 x26,0 x22, 0 xE22, 0 xEE3, 0 xx23, 00 xE1, 0 x21, 0 x200, 0 xEE0, 0 xxA0, 00 x60, 0 x61, 0 xA11, 0 x663, 0 xxA3, 00 xA2,00 x62, 0 x66, 0 xA66, 0 xAA7, 0 xx67, 00 xA5, 0 x65, 0 x644, 0 xAA4, 0 xx6C, 0 xxAC,
60、 00 xAD, 0 x6D, 0 xAFF, 0 x66F,0 x6E, 0 xAEE, 0 xAAA, 0 xx6A, 0 xx6B, 00 xAB, 0 x69, 0 xA99, 0 xAA8, 0 xx68, 00 x78, 0 xB8, 0 xB99, 0 x779, 0 xxBB,0 xx7B, 00 x7A, 0 xxBA, 00 xBE, 0 x7E, 0 x7FF, 0 xBBF, 0 xx7D, 00 xBD, 0 xBC, 0 x7CC, 0 xBB4, 0 xx74, 00 x75, 0 xB5,0 x77, 0 xB77, 0 xBB6, 0 xx76, 00 x72
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 《消化系统护理课件》课件
- 【2021高考复习参考】高三数学(理)配套黄金练习:10-7
- 【先学后教新思路】2020高考物理一轮复习-教案8-电路-闭合电路欧姆定律
- 一年级反义词100个
- 湖北省恩施州高中教育联盟2024年秋季学期高一年级期末考试物理试题(含答案)
- 【高效提能】2021高考历史(人教版)一轮作业:第七单元-资本主义世界市场的形成和发展
- 【名师一号】2021年岳麓历史必修3-双基限时练21
- 五年级数学(小数乘除法)计算题专项练习及答案汇编
- 四年级数学(三位数乘两位数)计算题专项练习及答案
- 二年级数学计算题专项练习集锦
- 送货员岗位劳动合同模板
- 2024年自然资源部所属事业单位招聘(208人)历年高频难、易错点500题模拟试题附带答案详解
- 2024年售楼处规章制度例文(六篇)
- 2024秋期国家开放大学本科《经济学(本)》一平台在线形考(形考任务1至6)试题及答案
- 动静脉内瘘成形术
- 法律意见书(适用于股权投资)
- JJF(苏) 276-2024 接触(触针)式表面轮廓测量仪校准规范
- 《建筑施工安全检查标准》JGJ59-2019
- 污泥(废水)运输服务方案(技术方案)
- 广东茂名市选聘市属国有企业招聘笔试题库2024
- 2024-2030年中国降压药行业市场规模分析及发展趋势与投资研究报告
评论
0/150
提交评论