



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、在ADAMS/View中建立控制系统实验指导书哈尔滨理工大学机械动力工程学院机械工程实验中心2013年11月一、 实验目的掌握在ADAMS中建立控制系统的方法,并达到能够利用软件解决工程实际问题的目的二、 实验内容完成一个偏心水平连杆的建模及通过PID环节进行负反馈控制三、 实验步骤1)启动ADAMS/View,选择新模型,在模型名输入Control_PID。选择菜单栏【Settings】【Units】命令,设置模型物理量单位,将单位设置成MMKS,长度和力的单位设置成毫米和牛顿【Settings】【Interface Style】【Classic】转换到经典界面,按下F4。(2)创建连杆。单
2、击几何工具包中的连杆按钮,将连杆参数设置为Length=400,Width=20,Depth=20,然后在图形区(0,0,0)水平拖动鼠标,创建一个连杆,如图1。 图1 创建连杆(3) 创建旋转副。单击运动副中的旋转副按钮,将旋转副的参数设置为1Location和Normal To Grid,,单击连杆的质心Marker点,将连杆和大地关联起来。(4) 创建球体。单击几何工具包中的球体按钮,将选项设置为Add to Part,半径设置为20,然后在图形区单击连杆,再单击连杆右侧的Marker点,将球体加入到连杆上,此时连杆的质心产生了移动。(5) 创建单分量力矩。单击载荷工具包中的单分量力矩按
3、钮,将单分量力矩的选项设置为Space Fixed和Normal to Grid,将Characteristic设置为Constant,勾选Torque并输入0,然后在图形区单击连杆,再单击连杆左侧的Marker点,在连杆上创建一个单分量力矩,如图2 所示。图2 偏心连杆模型(6) 运行仿真。将仿真时间设置成5s,仿真步数设置成100步,观看连杆在重力作用下的往复自由摆动。(7) 建立控制系统的环节。单击菜单【Build】【Controls Toolkit】【Standard Control Blocks】后弹出创建控制环节的工具包,如图3所示。单击输入环节按钮,将Name输入框中的名称修改成
4、.Control_PID.input_angl,单击Function输入框后的,弹出函数构造器,在函数类型下拉列表中,选择Displacement项,然后单击Angle abut z,再单击Assist按钮,如图4所示,在To Marker输入框中鼠标右键,在弹出的菜单中选择【Marker】【Pick】项,然后单击与旋转副关联的PART2.MARKER_3(如果比较难选,可在旋转副上右键,弹出选择对话框,选择PART2.MARKER_3即可),在From Marker输入框拾取旋转副关联的ground.MARKER_4,单击OK后,函数构造器应显示AZ(MARKER_3,MARKER_4),在
5、末端输入*180/pi,最后表达式为AZ(MARKER_3,MARKER_4)*180/pi,单击OK,再单击apply。单击,用同样的方法创建第2个输入,名称为.Control_PID.input_angl_velo,选择项,单击,About Marker可以不输入,如图5所示。再单击Assist项,最后函数表达式为WZ(MARKER_3,MARKER_4)*180/pi,单击OK,再单击apply。单击按钮,再创建一个输入,名称为.Control_PID.input_1,函数表达式为0,单击apply。图3 创建控制环节工具包图4 函数辅助对话框图5 函数辅助对话框(8) 创建PID环节。
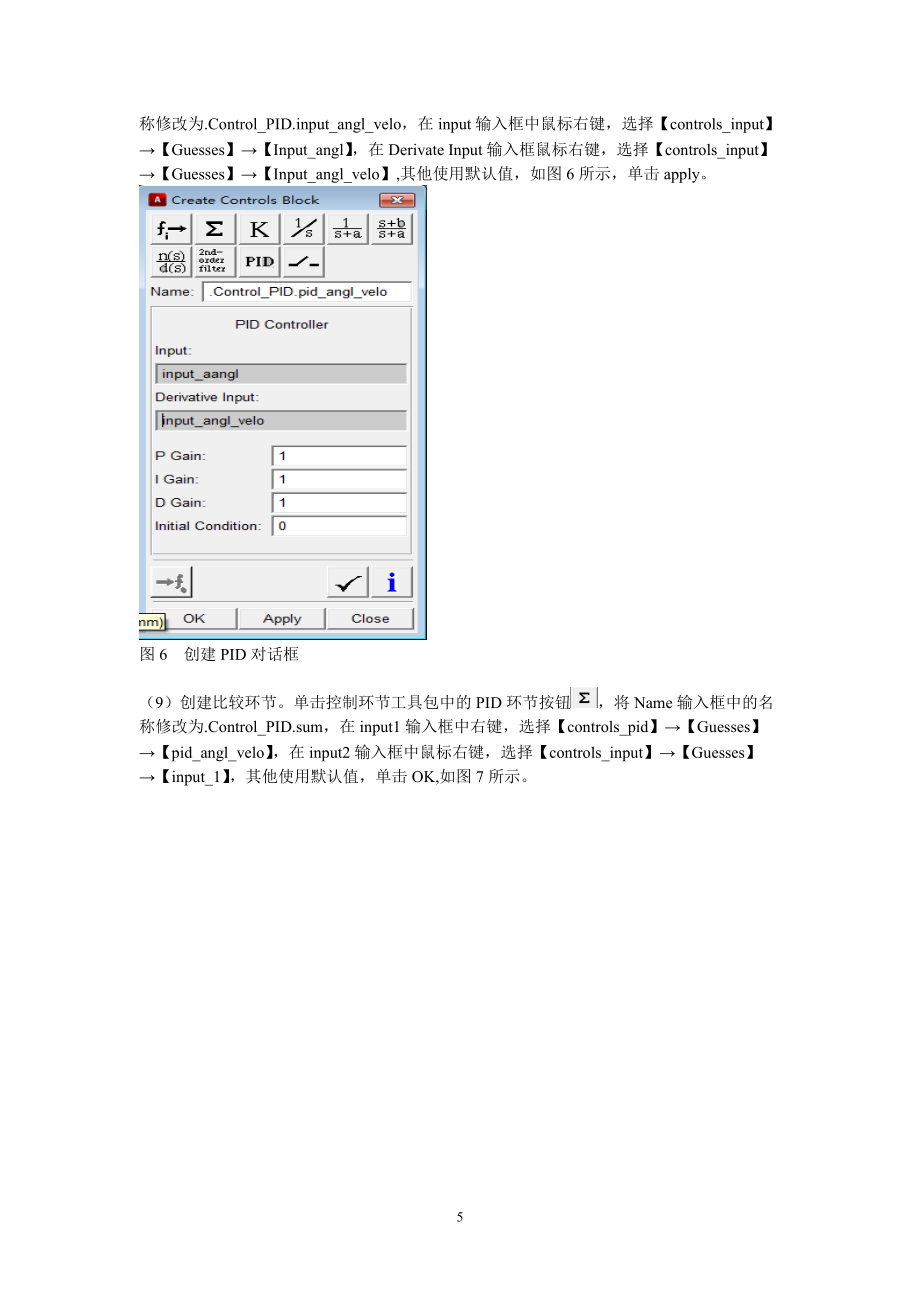
6、单击控制环节工具包中的PID环节按钮,将Name输入框中的名称修改为.Control_PID.input_angl_velo,在input输入框中鼠标右键,选择【controls_input】【Guesses】【Input_angl】,在Derivate Input输入框鼠标右键,选择【controls_input】【Guesses】【Input_angl_velo】,其他使用默认值,如图6所示,单击apply。图6 创建PID对话框(9) 创建比较环节。单击控制环节工具包中的PID环节按钮,将Name输入框中的名称修改为.Control_PID.sum,在input1输入框中右键,选择【co
7、ntrols_pid】【Guesses】【pid_angl_velo】,在input2输入框中鼠标右键,选择【controls_input】【Guesses】【input_1】,其他使用默认值,单击OK,如图7所示。图 7 (10) 将单分量力矩参数化。在图像区双击单分量力矩的图标,在弹出的编辑对话框中单击Function后的按钮 ,弹出函数构造器,函数类型选择选择Data Element项,选择函数,再单击Assist按钮,在输入框中单击鼠标右键,在弹出的菜单中选择【ADAMS_Variable】【Guesses】【sum_input1】,单击OK,在表达式后添加*(-1),以表示负反馈,最
8、后表达式为,单击OK,再单击OK。(11) 建立测试。在图形区,在旋转副上单击鼠标右键在弹出的菜单中选择【Joint:JOINT_1】【Measure】项后,将Measure Name的名称修改为Control_PID.JOINT_1_Angle,在下拉列表选择项,将分量设置为Z,如图8所示,单击OK创建第一个测试。用同样的方式为单分量力矩建立一个测试,名称为.Control_PID.SFORCE_Torgue,设置为Torque,分量为Z,单击OK,如图9所示。 图8 图9(12) 进行PID仿真。将仿真时间设置为20s,仿真步数设置为200步,单击,进行仿真计算。生成旋转角度的测试曲线和单
9、分量力矩的测试曲线,如图10,图11。图10 旋转角度的测试曲线图11 单分量力矩的测试曲线(13)单击F8按钮进入后处理模块,选择左上角的项,在显示区右键,在菜单中选择Load Animation加载动画,在Animation页的右下角勾选后,开始播放动画,如图12所示。可以看到连杆旋转一定角度后,又回到初始位置,并且逐渐静止不动。图12 (14) 修改PID环节的比例、微分和积分增益系数。按F8回到View模块,单击【Edit】【Modify】后,弹出数据库导航对话框,在列表中双击Control_PID,然后找到PID环节pid_angl_velo,单击OK按钮后,弹出修改PID环节的工具
10、包,如图13。将P Gain、I Gain、D Gain均修改为0.2,单击apply按钮后,再进行一次仿真,此时的旋转角度的测试曲线和单分量力矩的测试曲线,如图14,图15。图13 修改PID环节的工具包图14 旋转角度的测试曲线如图15 单分量力矩的测试曲线如果,将将P Gain、I Gain、D Gain均修改为8,单击apply按钮后,再进行一次仿真,此时的旋转角度的测试曲线和单分量力矩的测试曲线,如图16,图17。通过放大PID环节的增益系数越大,控制效果越好。图16 旋转角度的测试曲线图17 单分量力矩的测试曲线(15) 创建设计变量。单击【Build】【Design Variab
11、le】【New】后弹出设计变量对话框,将Name输入框修改为.Control_PID_Gain,在Standard Value输入1,将Value Range by 设置为,在输入0,在输入10,勾选,并在输入框中输入0.2,0.6,2,6,10,如图18所示。图18 创建PID控制的增益设计变量(注:这时会出现警告的对话框,可将其忽略如图19,若是提示有错误,建议从头开始再做一遍)图19 (16) 修改PID环节的增益。如果编辑PID环节的控制工具包没有打开,请单击Edit】【Modify】后,弹出数据库导航对话框,在列表中双击Control_PID,然后找到PID环节pid_angl_ve
12、lo,单击OK按钮后,弹出修改PID环节的工具包。在P Gain输入框中单击鼠标右键,在弹出的菜单中选择【Parameterize】【Reference Design Variable】,然后弹出数据库导航对话框,在其中找到PID_Gain变量,单击OK,将PID环节的P Gain参数化。将I Gain和D Gain改为0,单击apply。(17) 进行参数化计算。单击菜单【Simulate】【Design Evaluation】后,弹出参数化对话框,将设置为,选择项,并在其后的输入框中用快捷方式输入,在项后的输入框中右键选择【Variable】【Guesses】【.】【PID_Gain】,单击Start按钮开始参数化计算,如图20。图20 参数化设计对话框(18) 结果后处理。计算结束后显示出图21、图22、图23。图21图22图23鼠标右键以上三个图中的任意一个,显示Plot:scht1再选择Transfer To Full Plot,进入后处理模块,如图24、图25。图 24 连杆转角在每次试验中的随时间的变化情况图25 连杆最大转角随设计变量取值的情况按同样的方法,可只对PID环节的D Gain进行参数计算,其他环节的增益为零。不要单独对PID环节的I Gain进行参数计算软件会关闭程序如果对PID环节的P Gain、I Gain、D Gain同时进行参数化计算设
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
评论
0/150
提交评论