



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、农业机械管理进展综述Dionysis D. Bochtis, Claus G.C. Sørensen, Patrizia Busato摘要:智能机器和自主车辆引入农业操作将会提高效率以及减少对环境的影响。目前,传感和驱动技术的创新与信息和通信技术的改进为这种进步提供了可能。然而,这些工程完整的开发进展还需要重新审视传统农业机械的管理过程。因此,传统农业操作需要规划方法,特别是车间作业的规划必须补充新的规划功能,例如路线规划和任务顺序调度。本文的目标是概述当前在农业机械管理和进步,为未来智能载人机器人和自治农业可持续发展做准备。接下来选择了农业机械管理五个关键管理任务用来跨越不同阶段的
2、管理和水平。这些任务包括容量规划(战略层面),任务时间规划(战术级别)、调度(操作),路线规划(操作级)和性能评价(评价级别)。为每个管理任务,提供了一个定义,给出了最新的相关文献。最后,未来的需求将促进并设置框架,对于全面实施未来农业管理模式和工具的发展进行了讨论。关键词:产能计划;行程安排;任务时间计划;路径规划;性能评估;田间机器人1简介物理优化一直是提高农业机械生产和效率的主要驱动生产力。这种进化造成的显著受益于在先进的机械功能条件下的规模经济;这一趋势正在被环境和生物因素阻碍,限制了机器的尺寸和重量(如土壤板结)。因此,只有改善现代农业机械的效率边际才是有可能的。在这个意义上来说,进
3、一步改进有效性并不可用,但目前工程传感和驱动技术的进步创新,结合改进的信息和通信技术(ICT),抓住了改进重大先进机器的潜在效率。然而,这些工程的完整开发进展需要重新审视传统的农业机械管理过程。结果,传统的农业操作规划方法,特别是车间作业规划方法,必须补充新的规划功能,如路线规划和连续的任务调度。此外,农业机械管理相比比一般工业机械必须被以不同的方式管理。与工业设置相比,生物生产域受到环境的影响更大,固有的不确定性和风险性(如作物生长和天气状况)可以用于任何农场的描述。此外,考虑域和规划过程有很大的时间常数,变量有较大差异。一般来说,风险决策为农业机械操作规范。 本文概述了当前的目标,需要先进
4、的农业机械管理和准备未来智能载人机器人自治在农业可持续发展的业务。这将促进并设置框架为所需的开发工作以及全面实施未来农业管理模式和工具。在下面几节中,描述了农业机械管理的五个关键管理任务选择跨各种管理阶段和水平:容量规划、任务时间规划、调度、路线规划和评估。为每个管理任务,提供的定义,然后给出了最新的相关文献。最后,对未来需求进行了讨论。2管理阶段和水平根据ASABE标准(ASAE S495.1,2005),确定了以下四个阶段为农业机械操作和管理的任务:计划:选择系统组件和系统的预期性能预测。调度:执行各种操作的时候预计考虑因素,如可用性的时候,劳动力供给、工作重点和作物需求。操作:使用劳动力
5、和执行操作机器。控制:控制系统利用各种生产力的措施和标准。控制:该系统是利用各种生产力措施和标准控制尽管上述过程并不符合一般工程管理中定义的,他们将在本文中使用的知名历史方案的范围内分类农业机械管理。这样的分类涉及在不同的管理水平不同的农业机械管理任务操作。下面给出了一个描述和构建农业生产管理活动中定义的不同水平: (1)战略:设计生产系统一段1-5年或2年或更长的种植周期特别是劳动力/机械系统与所选类型的作物相关的。 (2)策略:建立一个生产计划一段1-2年或1-2种植周期,缩小资源使用,即劳动力输入和机械投入调整当前的计划。 (3操作:确定活动在当前种植周期。它包括一个短期的时间活动,和配
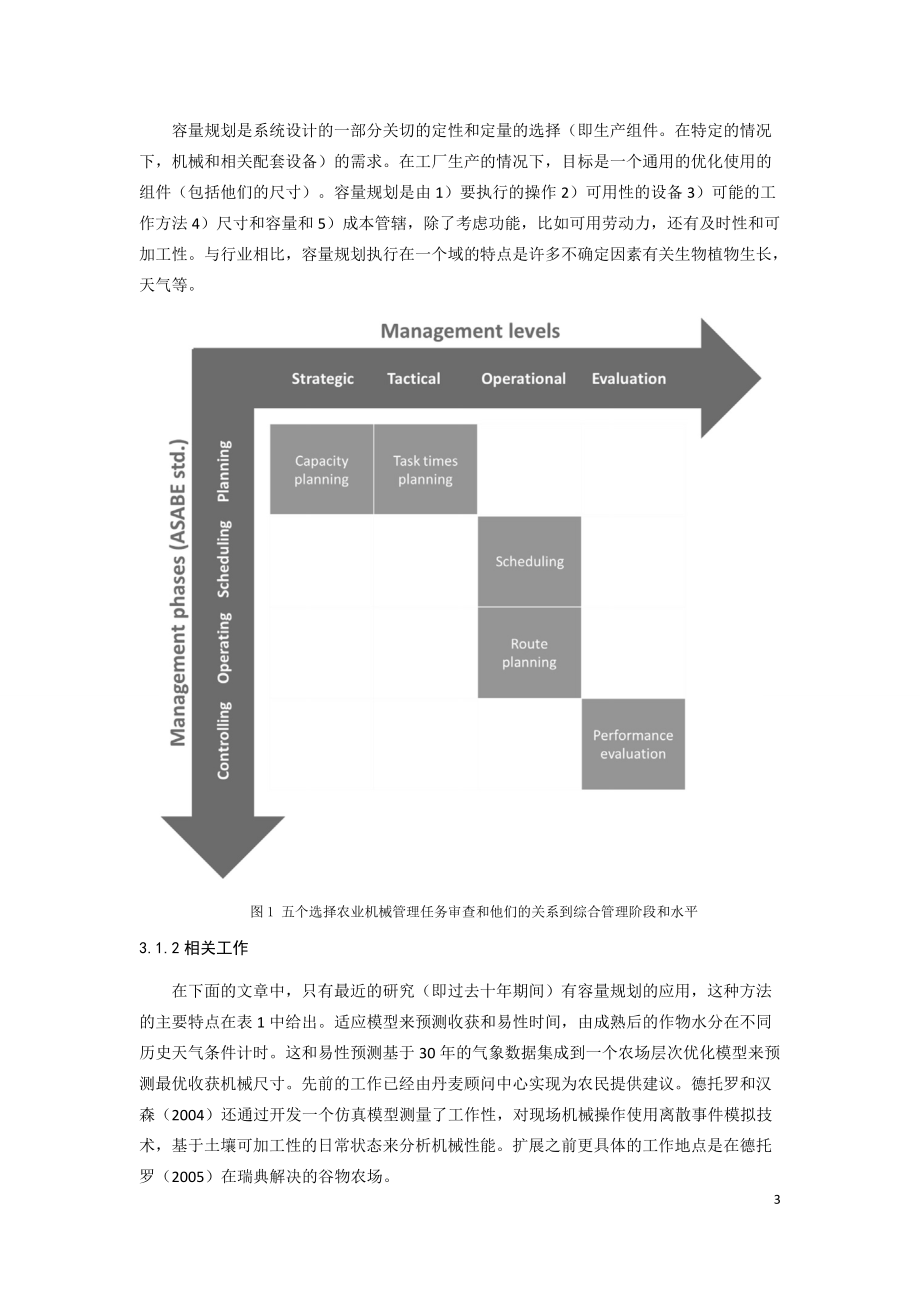
6、备的工作和任务。执行:执行控制任务和工作性能集表。评价:比较计划和实际执行的任务。 从上面列出的农业生产管理水平,执行水平的考察已经被排除在目前的审查中,因为没有足够的工作在相关农业机械领域的管理任务中(如动态决策与规划、无功规划基于故障诊断系统等等)。此外,许多决策任务与控制任务在这个层次重叠和覆盖等问题超出目前的审查的范围。3.农业机械管理任务 农业机械管理的五个关键管理任务选择跨各种管理阶段和水平(图1)。这些管理任务是容量规划,任务时规划,调度、路线规划,绩效评估。这些选定的管理任务涵盖大部分的话题已经被ASABE标准解决(ASAE EP496.3,2006),包括拖拉机性能、功率需求
7、,现场机器性能、可靠性、使用成本,选择现场机器的能力。然而,“替换”的主题并不包含在目前的审查,因为它纯粹是地址经济属性。3.1 容量规划3.1.1定义 容量规划是系统设计的一部分关切的定性和定量的选择(即生产组件。在特定的情况下,机械和相关配套设备)的需求。在工厂生产的情况下,目标是一个通用的优化使用的组件(包括他们的尺寸)。容量规划是由1)要执行的操作2)可用性的设备3)可能的工作方法4)尺寸和容量和5)成本管辖,除了考虑功能,比如可用劳动力,还有及时性和可加工性。与行业相比,容量规划执行在一个域的特点是许多不确定因素有关生物植物生长,天气等。图1 五个选择农业机械管理任务审查和他们的关系
8、到综合管理阶段和水平3.1.2相关工作 在下面的文章中,只有最近的研究(即过去十年期间)有容量规划的应用,这种方法的主要特点在表1中给出。适应模型来预测收获和易性时间,由成熟后的作物水分在不同历史天气条件计时。这和易性预测基于30年的气象数据集成到一个农场层次优化模型来预测最优收获机械尺寸。先前的工作已经由丹麦顾问中心实现为农民提供建议。德托罗和汉森(2004)还通过开发一个仿真模型测量了工作性,对现场机械操作使用离散事件模拟技术,基于土壤可加工性的日常状态来分析机械性能。扩展之前更具体的工作地点是在德托罗(2005)在瑞典解决的谷物农场。 容量规划的系统模型是由Søgaard和S&
9、#248;rensen(2004)发展和成熟的。优化模型是基于一个最低成本概念涉及所有预期的固定和可变成本(包括时间成本)的一个特定的农场规模和作物的计划。模型的输出是每台机器的尺寸,包括所需的拖拉机拖拉机功率和数量。具体来说,耕作的情况下,Sahu和Raheman(2008)开发了一个决策,支持系统匹配耕作实现对拖拉机系统性能的预测。考虑的条件包括操作条件、耕作深度,耕作速度,土壤条件、密度和质地。决策支持系统的预测能力通过比较预测和观测值的草案,验证滑动和测量领域的能力。 关于容量规划,基于成本及时性,德托罗,Lundin和琼森(2012)开发了一个仿真模型,几个收割机大小的组合和谷物水分
10、上限进行评估总成本和年度变化(机器劳动力及时性、干燥)。然而,天气的影响,生物和土壤因素对预收获谷物含水率预测在这个规划模型生成一个弱点。尽管如此,含水率模型验证数据适用于其他地理区域。SporndlyRosenqvist,德托罗和汉森(2009)在瑞典提出了一个对奶牛的及时性成本估算方法,根据干物质产量和营养价值的饲料来检查不同的收获机械系统和目前的结论,选择当时收割的青贮饲料。表1 容量规划方法及其功能3.2任务时间计划3.2.1定义 任务时间规划是指持续时间的分配活动。活动可以现场操作(“操作”是用于其性状),(例如,收获或工作元素运输)。任务时间计划是安排的先决条件。3.2.2相关工作
11、Sørensen,雅各布森和地梁(2003)开发了一个评估工具,从动物的房子覆盖整个链的粪便处理系统。劳动力需求的工具使机械能力和成本相用于肥料的处理面向系统的评估。任务时间建模和分析是指不同的技术,即连续流交通和有机肥料的应用,使用脐交通系统和传统的油轮运输。Sørensen(2003 b)开发了一种任务时间建模框架评估粪便处理机械的使用性能,根据农场给定的内部和外部条件。知识库包括能力和劳动力需求的应用,有机肥料使用注射或拖尾水管。最后,Sørensen和尼尔森(2005)使用任务时间计划作为比较不同耕作的基础系统的能量输入,二氧化碳排放和成本。从农场普遍配备
12、任务模型参数的研究有利于评估操作性能和使用不同的耕作系统产生的成本。巴克马斯特和希尔顿(2005)开发了一个计算机化的系统,交互的分析设备和任务时间动态操作系统。输出包括系统容量,机器闲置时间和效率的措施(如工作时间每小时的效率)。Sørensen、Halberg Oudshoorn,彼得森和Dalgaard特定任务模型(2014)用于劳动力和机械输入作为评估的基础能量输入和不同耕作系统的温室气体排放。任务时间估计的约束机械模仿轮作为系统和耕作的场景。表2总结了上述作品。表2 任务时间规划方法及其功能3.3调度3.3.1定义资源配置如调度问题,机器,劳动(如处理单元)的任务,在生产过
13、程中在给定的时间段操作,目标是优化(例如一个或多个目标,极小化加权总完工时间)。在一个农业背景下,调度被定义为“当执行各种操作,可用性的时候确定时间,劳动力和机械供应、工作重点和作物需求是一些重要的因素”(ASABE标准,1974)。两个一般类型的调度问题就可以找到生物转化系统领域,即(van Elderen,1980):3.3.2相关工作第一个农业科学方法,支持调度过程出现在1980年代早期,如范Elderen(1980),主要是基于线性规划和仿真方法。这些早期的方法认为纯粹的调度问题,而大量的测序方法处理计划最近才在文学史上出现。中关村Shikanai,冈崎(2008)混合Petri网引入
14、造型农场工作流程,描述农业过程和重新分配资源存在的不确定性作为这项工作的延续。 中关村Shikanai,冈崎(2009)提出了基于探索资源分配和调度的方法。未来扩张系统的随机调度方法在与真实的实现需要长期和在线调度的随机变量概率分布(如来自历史数据、天气和天气预报)。福尔兹和威尔逊(2005)开发了一个方法来调度收获的可再生资源。一个扩展的技术开发以前的工作从单一水平巴斯内特农场出发,福尔兹,威尔逊提出(2006)。典型调度问题的运筹学配方应用于工业生产,如作业车间调度问题(JSSP)或流水车间调度问题(FSSP),在农业操作领域提出了铸造排序调度问题(Bochtis,2010)。基于这一概念
15、,(Bochtis Dogoulis,et al .2013)制定的问题找到一个排列时间表,多个地理上分散的领域必须执行顺序生物质处理,操作序列依赖性设置时间的流水车间调度问题。这种方法把一台机器的情况下每个操作类型,扩展多机械可用的情况下给出了每个操作类型(Orfanou et al 2013)。表3给出了上述作品及其功能。表3 调度方法及其功能3.4农业车辆路由3.4.1定义农业车辆可以归类为主要或支持单位。根据公认的定义(Bochtis & Sørensen,2009),“主单位”一词指的是一种农业机械单位(如执行的主要工作任务。tractoresprayer组合),而
16、“支持单位”是指一个单位支持一个或多个主要单位(如收割粮食车操作)。3.4.2相关工作区域范围规划主要单位。相关研究区域范围规划提出了以下四个类别。所有规划方法的特点如表4所示。路线规划的过程中,现场操作,包括完全覆盖的区域可以作为生产多样化和非获能。生产是指作业的“商品”的数量是运出现场区域(输出材料流,如收获)或运输至分布区域(输入物流,如喷涂);农业机器执行多个路径来完成操作。非获能指没有材料之外,也没有作业的材料去除中性物质流(如耕作或割草)。注意操作的主要单位是酒店式忙个不停的,从主单位面积覆盖的角度来看,被认为是没有能力的限制。表4 区域范围规划方法及其相关特性3.5 绩效评估机械
17、性能评估方面的最后一步计划和控制为一个字段操作周期。重点是比较操作计划和实际执行操作。这种比较的结果必须集成在随后的重复规划周期和将使经验能够适应业务规划过程。根据Sørensen et al 2010现场操作的评价包括四个主要的决策过程,即:(a)数据处理文档,(b)符合标准检查,(c)总结操作的性能,(d)与目标进行比较。4未来的需求未来的研究路径的关键是自适应规划,执行数据操作是用来微调连续规划工作。这样的操作计划是适应领域水平的实际情况,而不是根据定额的数据,因为他们已经在过去使用的研究没有获得自动数据记录。这种自适应特性可以在两个方面,即在一个特定的管理水平(水平实现)和不同管理水平(垂直实现)。例如,在战略层面上,容量规划工具可以从其他管理水平集成计划工具,如调度和路线规划工具从操作层面和任务时间工具从战术层面,受益于他们的离线工具(即模拟工具),并进一步将自动数据记录的执行水平储存。未来需求的五个选择管理任务。在图2提供了一个概述的这些需求,他们的连接,外部需求的开发。图2 未来农业机械管理任务的要求 5结论 本研究综述了农业机械管理最近的进展,确定了在未来方面的需求。以下是提
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 2025建筑工程勘察设计合同 标准版模板
- 自家房屋转租合同
- 2025有关权益保障反担保合同范本
- 电子设备购销合同
- 个人购房合同范文
- 2025年度劳动合同范本模板
- 铲车出售协议书模板
- 房产收取钥匙协议书
- 2025年03月河北唐山市曹妃甸区公开选聘高层次专业技术人员15名笔试历年典型考题(历年真题考点)解题思路附带答案详解
- 2025年03月扬州市广陵区事业单位工作人员35人笔试历年典型考题(历年真题考点)解题思路附带答案详解
- 工龄认定文件
- 《社会工作实务》初级课件
- 高低压开关柜培训资料课件
- 寄生虫虫卵专业知识讲座课件
- tlc4000中文说明书在使用本产品前务必先仔细阅读并按照相关要
- 舆论学教程PPT整本书课件完整版电子教案全套课件最全教学教程ppt(最新)
- 2022年水果种植基地项目可行性研究报告
- 管道单线图绘制与管理软件入门介绍-V
- 浅谈小学音乐教学中的情境创设(学校竞赛论文)
- 海马CVT-VT2变速箱培训
- 第三章延伸孔型设计
评论
0/150
提交评论