



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
第2章信号转换与z变换
■解决问题:信号采集与描述
L什么是信号抽样
AX因
x[k]=x{t)
t=kT
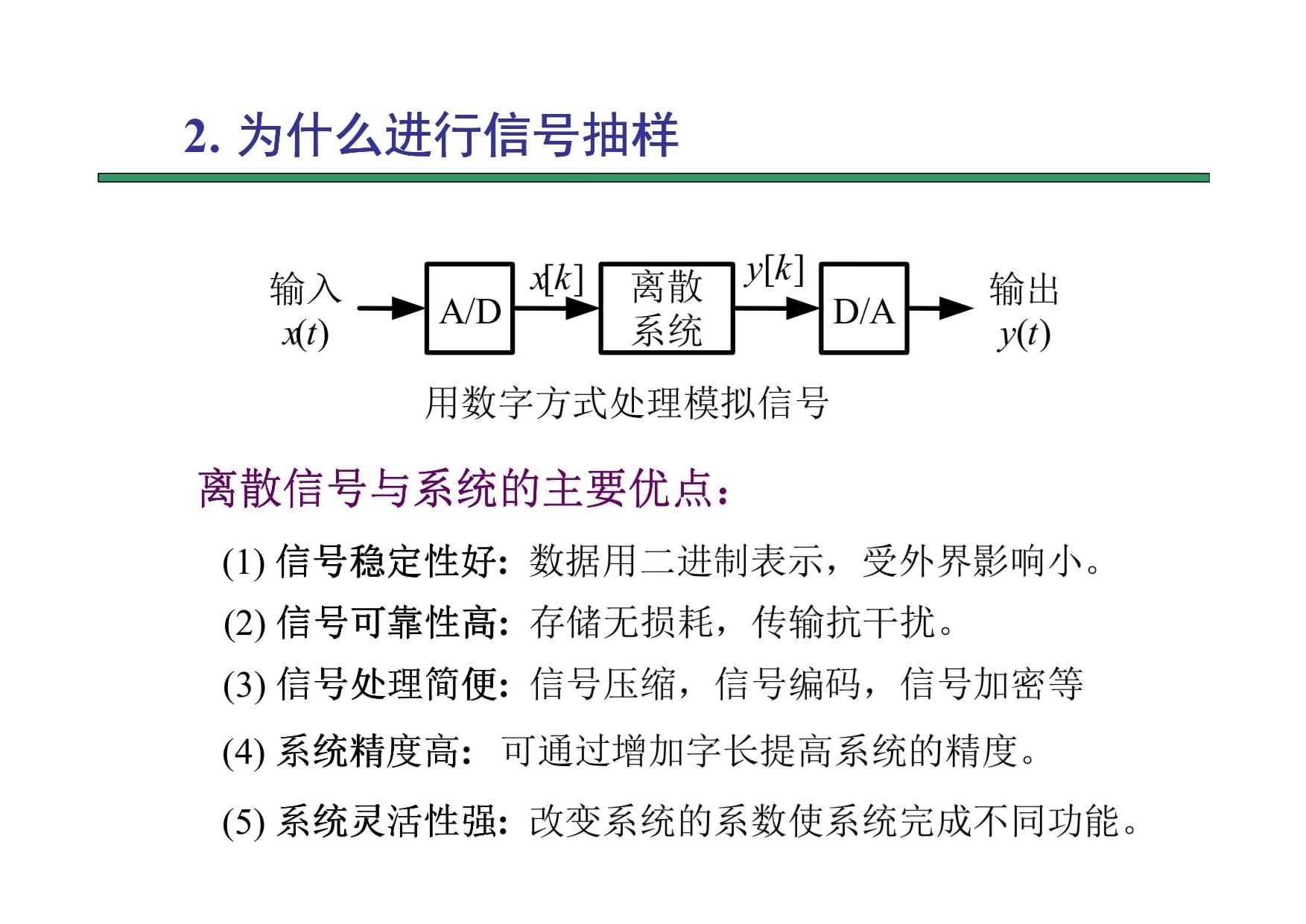
2.为什么进行信号抽样
输入_a输出
A/DD/A一
xo系统
用数字方式处理模拟信号
离散信号与系统的主要优点:
(1)信号稳定性好:数据用二进制表示,受外界影响小。
(2)信号可靠性高:存储无损耗,传输抗干扰。
(3)信号处理简便:信号压缩,信号编码,信号加密等
(4)系统精度高:可通过增加字长提高系统的精度。
(5)系统灵活性强:改变系统的系数使系统完成不同功能。
3.如何进行信号抽样
3.如何进行信号抽样
x[k]=x{t}t=kT
如何选取抽样间隔7?
本章内容:
•信号变换原理
•采样信号恢复与保持器
•信号转换的工程化技术
•Z变换/Z反变换
・计算机工程设计中的问题
Ji2.2信号变换原理
2.2.1计算机控制系统信号转换分析
图2.1计算机控制系统前后的信号转换关系
2.2.1计算机控制系统信号转换分析
-模拟信号:时间上连续,幅值上也是连续的信号,
即通常所说的连续信号。
-采样信号:时间上离散,幅值上连续的信号。
-数字信号:时间上离散,幅值上也离散且已经量化
的信号,可用一序列数字表示。
-量化:采用一组数码(多用二进制数码)来逼近离
散模拟信号的幅值,将离散模拟信号转换成数
字信号。
-采样:利用采样器,将模拟信号按一定时间间隔
抽样成离散模拟信号的过程。
・2.1计算机控制系统信号转换分析
采样器量化
模拟信号---------采样信号---------^数字信号
A——A/D变换——
D/A转换
模拟信号、采样信号、数字信号之间的转换关系
2.2.2采样过程及采样函数的数学表示
>模料信号到照生信号的信号变换。
输出
输e*u*
x(t)’
计算机控制系统方框图
*号表示离散化的意思。
2.2.2采样过程及采样函数的数学表示
(a)采样开关
(b)连续信号
(c)开关函数
2.2.2采样过程及采样函数的数学表示
(d)采样信号
(e)采样过程叫调制器尸)f*(t)=p(t)f(t)
因%eT,所以分析时可近似认为今=0,以单位脉冲函
数3(t)代替p(t)0
*2.2.2采样过程及采样函数的数学表示
理想单位脉冲3(1)定义:
理论表达形式:6田={t=0
two
工程表达形式:S(t)={;t=0
two
理想单位脉冲序列8式方):心丁⑴
八AAA八AAAA
0T2Tt
数学表达式:+8
心⑺=£-kT)
k=g
2.2.2采样过程及采样函数的数学表示
H-OO
f*S=fS3T8=/32火—kT)
k二g
考虑物理上可实现,又可近似为:
+oo
/*⑺=/⑺可⑺=/(百(TT)
k=0
可见,/*⑺具有采样信号的特性。
连续函数f(t),经一个以7为周期的脉冲采样器
调制后可以得到采样函数/*«)。
*2.2.3采样函数的频谱分析及采样定理
»由模料信号物熬与信号的信号变换,信
号变换的可喊喉。
⑴啪)u*(t)____u(t)输出
/、丁C—数字控制器—>保持器一>被控对象
x(t)TV------------
\-y*(t)
T1y(t)
计算机控制系统方框图
2.2.3采样函数的频谱分析及采样定理
采样函数的一般表达式为f*3=f-kT)=f⑦加。)
k=-8
-|-oo
金⑴是周期函数,可以展成傅氏级数(Fourier):外⑺二2c"如
k=g
其中采样角频率:3s与傅氏系数:5」];斗(""如力
T5
37⑴在[—7/2,T/2]时间内,有
匚33f3dt=/⑺L
]_
于是得到:cS(ty-jk^dt=:it
k=jJ;:t=o1
।2.2.3采样函数的频谱分析及采样定理
1丁方
于是有:4(。二了士”如
1丁方
从而得到:/*«)=/Z/。)*如
/k=-8
于是采样函数/*«)的拉氏变换式为:
1丁方
F\s)=\j\t)e-Stdt=f-工fW3dt
Ik=-8
定义拉氏变换式:/(s)=£f(t)e-stdt
采样函数,(f)的拉氏变换式为:
1+8
/⑸=「,(。「力=「7Z/("如厂力
/k=-8
样函数的频谱分析及采样定理
1+8
根据拉氏变换复位移定理得到:F*(5)=-£F(S—jk3)
Tk=g
14-oo
令n=-k,得到F*(s)二亍EF(s+jn①,)
在令S=j3则采样函数的傅氏变换式为:
14-00
F\jcd)=-ZF(j3+jH3s)
1/n=—oo
周期函数,周期为@=女
Srji
2.2.3采样函数的频谱分析及采样定理
采样函数频谱与连续函数频谱之间的关系,即采样
函数的傅氏变换式:
1+oo
/(改)二£尸(於+井以)
/左=—OO
尸。・劭为原连续函数,(f)的频谱,
劭为采样函数/*«)的频谱。
2.2.3采样函数的频谱分析及采样定理
4-00
被控对象一般具有低通滤波特性,因而隼)的带宽
是有限的,a为非周期频谱图。
由于采样过程会产生高频频谱,b为周期频谱图。
K=0时叫主频谱,主频谱就是原连续函数的频谱,
只是幅值为原来的1/T。
2.2.3采样函数的频谱分析及采样定理
这时,采样信号/*«)的频谱是由多个孤立频谱组成
的离散频谱。如果将/*“)经过一个频带宽带大于Qnax小
于g的理想滤波器4/⑷,滤波器输出就是原连续函数
的频谱。
2.2.3采样函数的频谱分析及采样定理
(2)3s<2㈤max
这时,采样函数/⑺的频谱已变成连续频谱。重叠后的频
谱中没有哪部分与原连续函数频谱尸。劭相似,采样信号厂⑺
不能通过低通滤波方法不失真的恢复原连续信号。
2.2.3采样函数的频谱分析及采样定理
为了不失真的使采样函数恢复原连续函数:
3?2.x
香农采样定理:
“如果一个连续信号不包含高于频率8max的频率分量(连续
信号中所含频率分量的最高频率为0max),那么就完全可以
用周期万//曲的均匀采样值来描述。或者说,如果采样
频率q>2凡海,那么就可以从采样信号中不失真地恢复原
连续信号”。香农采样定理给出了采样周期的上限,即采样频
率的下限。
2.2.3采样函数的频谱分析及采样定理
■抽样定理的工程应用
连续信号的频谱是无限带宽,此时无论怎样提高采
样频率,频谱混叠或多或少都将发生,即许多实际
工程信号不满足带限条件。
]2.2.3采样函数的频谱分析及采样定理
■混叠误差与截断误差比较
"(j。)
2.2.3采样函数的频谱分析及采样定理
理论上采样频率越高越好,频率越高复现连
续信号的精度越高。系统硬件要求采样频率越低
越好,采样频率越低对系统硬件要求越低,所以
在工程实际中往往采用折中的方案。
2.2.4采样周期丁的讨论
工程上,束年周期怎并确定呢7
如声音的最高频率为4000Hz,当采样频率为
8000Hz时就能够在计算机中完全复现声音信号。
2.2.4采样周期丁的讨论
工程上一般不知道系统的最高频率,所以常用系统的预
期开环频率特性的截止频率4或系统预期闭环频率特性的
谐振频率叫来确定采样频率。
10a)cylOo^Q
&2.2.4采样周期T的讨论
采样周期选取的一般原则:
♦:♦若信号/")最高频率.已知,工程上一般取
私2(5〜10)仞m
♦:♦若系统的带宽例已知,一般取
qN(5〜10)g
♦:♦若干扰信号的最高频率0f,应满足
3s>20f
2.2.4采样周期丁的讨论
慢过程采样周期T的选择
被控参数采样周期T(S)
主汽压力、汽包压力、炉膛负压、
1
凝汽器真空、汽包水位、汽机转速
流量、主汽温度、一般压力真空和电气参量3〜5
一般液位6〜8
一般温度10〜20
成分:OxfNOxfSoxfCOx10-30
2.2.4采样周期丁的讨论
快过程采样周期,的选择:
根据系统上升时间而定采样周期,即保证上升
时间内进行2到4次采样。设行为上升时间,Nr为
上升时间采校次数,则经验公式为:
2.3采样信号恢复与保持器
>由懿庄信号刎模料信号的信号变换。
e*u*输出
x(t),
计算机控制系统方框图
・■2.3采样信号恢复与保持器
数字信号的恢复是指将采样信号恢复为模拟信号的过程,
物理上能够实现这一过程的装置称为保持器0
2.3采样信号恢复与保持器
如果有一脉冲序列/⑺,从脉冲序列的全部信息
中恢复原来的连续信号u(f)的过程是由保持器完成的。
小。值的复现是通过多项式外推实现的。即是由
f二k/前各采样时刻的值推算出来。实现这样外推的
一个方法,是利用u(。的寨级数展开公式:
〃«)=u(kT)+u(kT)(t—kT)+U'kT)«_kT)2+.・・
女2.3采样信号恢复与保持器
各阶导数的近似值用各阶差商表示:
u(kT)=-{u(kT)—u[(k-1)T]}
i1
u\kT)=—{u(kT)~2u[(k-1)7]+u[(k-2)7]}
由此类推,计算n阶导数的近似值需已知n+1个采样时刻的
瞬时值。若右边只取前n+1项,便得到n阶保持器的数学表达式。
1/(/)=u(kT)+〃(左一)二半左二1))工]«_kT)
u(kT)2u[(k-1)]+u[(k-2)7]
+(t—kT)2H—
2T2
式中,kT<t<[k+\)T
2.3采样信号恢复与保持器
由破冬信号到模物信号的信号变换,信
号变换的可谦植。
e*u*输出
x(t),
计算机控制系统方框图
2.3.1零阶保持器
零阶保持器是采用恒值外推规律的保持器,
即uN)=u(kT)kT<t<(k^To它将前一采样时刻“了的采
样值保持到下一采样时刻m+i)丁,其输入信号与输出信
号的关系如图所示。
*
U
u(kT)〃四)
零阶保持器输入输出关系
a-零阶保持器单元方框图b-零阶保持器输入c-零阶保持器输出
2.3.1零阶保持器
(a)0阶保持(b)水平垂直抽样间隔
为前者的一半
2.3.1零阶保持器
为了便于计算,把脉冲响应函数g4)
分解为右图(b),根据线性函数可加性,
可表示为:
当。=1(。—1(-T)
式中,1(t)为单位阶跃函数:
1/>0
1(%)=<
0/<0
V
由拉氏变换可得零阶保持器的
传递函数:
[c-Ts
1—e
零阶保持器的单位脉冲响应
G〃(S)=LL")]二
S
2.3.1零阶保持器
令s二j3,得零阶保持器的频率特性:
1-e-jC0T
j3
或%(次)=/。初
sin{a)T/2)「
式中匕(,。)|=7-
coT/2
_coT
N%(9)~一/,
.2.3.1零阶保持器
零阶保持器的幅频特性如图所示。它的幅值随角频率3
的增大而衰减,具有明显的低通滤波特性。但是,它不是一
个理想的滤波器,除了主频谱之外,还允许附加高频谱通过
部分。因此,被恢复的信号与原信号是有差别的。
“监Ci町
零阶保持器的幅频特性
2.3.1零阶保持器
零阶保持器的相频特性从下图可看出,输出比输入平均滞
后了T/2时间。零阶保持器附加了滞后相位移,增加了系统的
不稳定因素。
零阶保持器的相频特性
2.3.1零阶保持器
零阶保持器的输入和输出信号
若将阶梯波输出信号的各中点连接起来,可以得到一条
比连续信号滞后T/2的曲线,反映了零阶保持器的相位滞后
特性。
2.3.1零阶保持器
jT(1)鸣
1-e-Tsin(W/2)2
零阶保持器的频率特性为:/。行助=------------------二1--------------e
j①coT/2
幅频特性为:
相频特性为:
Z%。(J。)-一外7/2+k兀,k=INT(a)/3)
取整函数
开关特性
2.3.2一阶保持器
取保持器外推式的前两项,组成一阶保持器:
Uh(t)=u(kT)+u(kT\t-kT)kT<t<[k-¥\)T
u(kT)-u\(k-1)T]
g)=u(kT)+二;。一kT)
图2.12一阶保持器工作情况
2.3.2一阶保持器
(a)结构图(b)单位脉冲响应(c)单位脉冲响应分解
图2.13一阶保持器的脉冲响应
2.3.2一阶保持器
一阶保持器的单位脉冲响应函数:
g1(0=l(0+^xl(0-2xl(z-T)-^^xl(z-T)
+-2T)+0二,义1(,—2T)
卬八12-T2112ST,11-2sT
%。)=_+/万一eS-——'esT+—e+~~e
SISs1ss1s
于是得到一阶保持器的传递函数为:
(\-e-sT^
%(s)=T(l+sT)——
IsT)
2.3.2一阶保持器
频率特性为:
图2.14一阶保持器幅频与相频特性(虚线为零阶保持器频率特性)
2.3.2一阶保持器
零阶保持器与一阶或高阶保持器比较:
・零阶保持器和一阶或高阶保持器相比,它具有最小的相
位滞后,而且反应快,对稳定性影响相对减少,再加上容
易实现,所以在实际系统中,经常采用零阶保持器。
小结:
■信号变换是信号丢失(A/D变换)和信号补充(D/A变换)
的过程,“失真”在信号变换中或多或少都会发生。只有满足
一定的条件(香农采样定理,零阶保持器等),才能够保证
信号变换的可靠性。
采样定理的实际应用举例
利用离散系统处理连续时间信号
X0
铁路控制信号识别
采样定理的实际应用举例
铁路控制信号识别
•
机
机车信号识别
车O-----------
信O
号A/D转换器
传感器
采样定理的实际应用举例
列车运行控制系统是轨道交通最重要的技术装备,它是由
轨道电路以钢轨为通道,将控制列车的信息传输到列车上的。
各控制分区
-1~2公里-
采样定理的实际应用举例
车载主体机车系统,是其中的关键部分,功能是接收来自
钢轨的信号,经过解调、译码来控制驾驶室信号机的信号显示,
同时输出给后级的列车速度控制设备。
系统主要由接收线圈(天线)、控制主机(包含记录器及
远程监测模块)及机车信号机(信号显示器)构成。
车戮信号安全一列控车载
控制主机f设备
各控制分区
采样定理的实际应用举例
传统的车载信号系统,由于安全性及可靠性等技
术的局限,仅能作为辅助信号应用,司机必须瞭望
地面信号机来驾驶列车。
国际公认160km/h以上或高密度的列车运行已
不能靠司机瞭望地面信号方式保证安全,而必须以
车载信号作为主体信号来控制列车。
采样定理的实际应用举例
主要产品:JT1-CZ2000型机车信号车载系统。
采样定理的实际应用举例
铁路控制信号识别
....AJ1.1
R«*dyA=240B-Q-240
铁路控制信号的时域波形和频谱
采样定理的实际应用举例
/L个冏题:
什么要进行信号变换7
参考各嚓:计算机与被控对象组成的闭环反馈系统的两种信
号类型不统一,必须通过信息转换使信号满足各环节的输入输
出关系。
»模N信号是怎咨按成一定的时间间俯抽并阀离微
信号的%7
4-00
参考答案/f*⑺=f(t)g⑴=f(t)E6(t-kT)
k=0
连续函数f(t),经一个以7为周期的脉冲采样器调制
后可以得到采样函数f\t)
>束曲善救怎禅才惋系夫女他恢复展这族信号7
参考本嗓:为了不失真的使采样函数恢复原连续函数:
3s22仞max
工程上,束曲周期怎并确是见7
参考答案:理论上采样频率越高越好,频率越高复现连续
信号的精度越高。系统硬件要求采样频率越低越好,采样频
率越低对系统硬件要求越低,所以在工程实际中往往采用折
中的方案。
怎曲将计算机的赵与信号箝换,模料信号7
参考各案:当双之2稣ax时,在被控对象前加一个理想滤波
器,可以再现主频谱分量而除掉附加的高频分量。这种滤波
器叫做保持器。
经客阶保持器恢复的信号必与晨唾陵徐数认0■
多大差别7
参考答案:
幅频特性:除了允许主频谱通过之外,还允许附加的
高频频谱通过一部分。
相频特性:附加了滞后相位移,增加了系统不稳定因
素。
2.4信息转换的工程化技术
#+B8942
ADC0809CCN
抽样间隔(周期)T(s)
抽样角频率0sam=2兀/T(rad/s)
抽样频率几m=l/T(Hz)
2.4信息转换的工程化技术
2.4.1A/D转换的基本工程化技术
1、A/D转换的性能指标
(1)A/D精度
指转换后所得数字量相当于实际模拟量值的准确度,
即指对应一个给定的数字量的实际模拟量输入与理
论模拟量输入接近的程度。
A/D转换器精度:数字部分由A/D转换器的位数决
定;模拟部分由比较器、T型网络中的电阻以及基
准电源的误差决定。
2.4信息转换的工程化技术
精度的高低是用误差来衡量的,误差大精度低,
误差小精度高。
例如,一个A/D转换器,理论上5出应数字量
800”但实际上4,997~4,999H匀产生数字量
800”那么绝对误差将为
|(4.997+4.999)/2—5|=2小%
或者相对误差将为
|(4.997+4.999)/2—51/5=0.04%
2.4信息转换的工程化技术
(2)分辨率
指输出数字量对输入模拟量变化的分辨能力,利用
它可以决定使输出数码增加(或减少)一位所需要
的输入信号最小变化量。
设A/D转换器的位数为n,则A/D转换器的分辨率为:
2〃一1
2.4信息转换的工程化技术
有时也用最小有效位LSB代表的模拟量来表示,如
12位A/D芯片的分辨率为:
1
D—------=2.44x107
212-14095
如果输入电压最大值为5V,则12位A/D芯片能够分
辨的输入电压最小变化量为:
5V
=1.22mK
212-1
2.4信息转换的工程化技术
(3)转换时间
从A/D转换的启动信号加入时起,到获得数字输出
信号(与输入信号对应之值)为止所需的时间称为
A/D转换时间。该时间的倒数称为转换速率。
A/D的位数越大,则相应的转换速率就越慢。逐
次逼近式A/D转换器转换时间为几微秒~几百微秒,
双积分式A/D转换器的转换时间为几十毫秒~几百
毫秒。
启动A/D转换有内、外两种启动方式。
2.4信息转换的工程化技术
(4)量程
量程指测量的模拟量的变化范围,一般有单极性
(例如0~10V、0~20V)和双极性(例如・5V~+5V、
-10V^+10V)两种。
为了充分发挥A/D转换器件的分辨率,应尽量通过
调理环节(放大器)使待转换信号的变化范围充满
量程。
,12.4信息转换的工程化技术
2、A/D转换的典型芯片
ADC0809是一种采用逐次逼近式转换原理的8位8通道的
A/D转换器芯片。
主要特性参数如下:
分辨率:8位,零位误差和满量程误差均小于0.5LSB;
量程:0〜5V;
通道:8个模拟量输入通道,有通道地址锁存、输出
数据三态锁存功能;
转换时间:约为100约;
工作温度范围:・40〜+85℃;
功耗:15mW;
电源:单一的+5V电源供电。
EOC
ST.ARTCLOCKOE
1J
X28-INz
・
路27—JN,
[出:
快326l、n
三
【g
加1-ADDA
毒.25
开A/D口一ADDB
使21
关一ADIX:
存START-623
转—NDBt•T
绽K(K:-■X
DB)【)$-HADCO8U9、;
换冷
磔D%OE-920
DBi
ADDACI.IH'K-1019
ADDB地址面存DR,-1118
AhlX,%EbIt—12)7
ALE
GNI)~1316
]|15
ASTART为A/D转换启动信号(输入,身电平有效);E0C为A/D转
换结束信号(输出,转换期间该端一直为低电平,当A/D转换
结束时,输出一个高电平)。
A0E为数据输出允许信号(输入,高电平有效),当A/D转换结
束时,向该端输入一个高电平,才能打开输出三态门,输出数
子里。
$2.4信息转换的工程化技术
VREF(+)、VREF(一)为基准电压引脚,基准电压的取值
范围为-10-10VDC,可视实际情况选择。
A/D转换器的输入电压VE,位数n,参考电压VREF^)、
VREFG)的关系为:
嗫一PREF(一)
D=x2n
VREF(+)一^REF
ADC0809为8位A/D转换器,故〃=8。
-=
>单极性输入时,若VREF(+)=5V,VREF()0V9Vjn—
1.5V,则口=[(L5-0)/(5・0)]x256=76.8=77=4DH。
>双极性输入时,若VREF(+^)=+5V,VREF(-)=-5V,Vjn
=-1.5V,贝!JD=[(・L5+5)/(5+5)]X256=89,6P90=5AH。
,12.4信息转换的工程化技术
3、A/D转换芯片的选择
口满足用户的各种技术要求
□A/D输出的方式(中断方式、查询方式等)
□A/D芯片对启动信号的要求
□A/D的转换精度和转换时间
口稳定性及抗干扰能力等。
,12.4信息转换的工程化技术
□A/D转换器位数选择:
设A/D转换器的位数为小模拟输入信号的最大值
为A/D转换器的满刻度,则模拟输入信号的最小值
umm应大于等于A/D转换器的最低有效位。即有
Jfmax_
2〃一1
所以心lg[〃max/〃min+l]/lg2
模拟输入信号的最小值
^^2.4信息转换的工程化技术
4、A/D转换的标度变换
进入计算机之前
相同于上述过程的逆过程
:标度转换
使用工程量进行编程u----------
感表与管理等「
计算机内部
2.4信息转换的工程化技术
假设映射为线性关系,于是由y=〃x)得到:
B-B
【广学(X—4)+8。
4一4
由c=g(y)得到
C=^f(Y—B°)+C。
若为=0,于是得到
C-C
。=六管(X-4)+孰
4—4
由上式得到
(4n-4)x(c-co)
C〃「Co为
式中C为计算机已知的数字量,计算出来的X就是
被检测的工程量。
2.4信息转换的工程化技术
以PLCS7-200和0〜5V标准输入信号为例。经A/D转换
器转换后,得到的数值是6400〜32000,0=6400,
Q=32000,于是有
(4-4)x(0-6400)
-r力0
32000-6400°
若温度传感器检测的温度范围为40〜60℃,用上述的方
程可表达为
70(C-6400)
X-------------------1U
25600
当计算机的A/D转换数据,即采样数据为C=16000时,
得到X=16.25,意味着此时温度值为16・25℃。
242D/A转换的基本工程化技术
1、D/A转换的性能指标
(1)D/A精度
D/A的精度指实际输出模拟量值与理论值之间接近
的程度,与D/A转换器的字长、基准电压有关,主
要由线性误差、增益误差及偏移误差的大小决定。
(a)线性误差(b)增益误差(C)偏移误差
图2.16D/A转换器的误差
242D/A转换的基本工程化技术
例如:
一个D/A转换器,某二进制数码的理论输出为2.5V,
实际输出值为2.45V,则该D/A转换器的精度为2%。
若已知D/A转换器的精度为±0.1%,则理论输出为2.5V
时,其实际输出值可在2.5025〜2.4975V之间变化。
242D/A转换的基本工程化技术
(2)分辨率
分辨率指输入数字量发生单位数码变化时输出模拟
量的变化量。
分辨率也常用数字量的位数来表示,如对于分辨率
为12位的D/A转换器,表示它可以对满量程的
1/212=1/4096的增量做出反应。
242D/A转换的基本工程化技术
(3)转换时间
从接收一组数字量时起一到完成转换一输出模拟量
为止所需的时间称为D/A转换时间。一般为微秒级,
有时可以短到几十纳秒。
D/A转换器一般具有零阶保持功能(数字锁存)。
242D/A转换的基本工程化技术
(4)输出电平与代码形式
对于D/A来说,不同型号的D/A转换器的输出电平相
差较大,一般为5V〜10V,高压输出型的输出电平可
达24V〜30V。还有一些电流输出型,低的有20mA,
高的可达3A(一般D/A带负载能力不够,需接入功
率放大器)。
D/A转换器单极性输出时,有二进制码、BCD码;当
双极性输出时,有原码、补码、偏移二进制码等。
2.4.2D/A转换的基本工程化技术
2、D/A转换的主要芯片
8位D/A转换器芯片DAC0832,有R-2RT型电阻网络.
主要特性参数如下:
输入数字量分辨率:8位;
电流建立时间:
精度:1LBS;
基准电压:-10V^+10V;
电源电压:+5VT15V;
输入电平:符合TTL电平标准;
功耗:20mWo
242D/A转换的基本工程化技术
3、D/A转换的输出信号形式
运算放大器A1在电路中起反相比例求和作用,可以实现D/A
的单极性输出。此时,VOUTI、VREF、D7〜Do(D)的关系为:
-OUT1=
—Knr5/2〃
上式说明,对于DAC0832(n=8),若取VREF=5V,当
D7^DO=OOH(0)时,VOUTI=0V。
当D7〜D0=FFH(255)时,VOUTI=£V;当D7〜D0=7FH
(127)时,VOUTI=-2.5Vo
242D/A转换的基本工程化技术
DACO«32.
V世
Dr
।
D(1
二
RR1^F-1)
Vy0UT2IDREF+—DVOUT\)=_/yREF(V
%火22
上式说明,对于DAC0832(n=8),若取VREF=5V,当
D7〜DO=OOH(0)时,VOUT2=-2.5V;当D7〜D0=FFH(255)
时,=;当时,VT2=0Vo
VOUT22.5VD7〜D0=7FH(127)OU
2.4.2D/A转换的基本工程化技术
4、D/A转换芯片的选择
□性能满足要求
口结构和应用上接口方便
口外围电路简单
□D/A的转换分辨率
□D/A的转换精度和转换时间
口稳定性及抗干扰能力等
242D/A转换的基本工程化技术
对于D/A转换器的字长的选择,可以由计算机控制
系统中D/A转换器后面的执行机构的动态范围来选定。
设执行机构的:大输入电压为/2执行机构的死区电
压为"A,D/A转换器的字长为小则计算机控制系统的
最小输出单位应小于执行机构的死区电压,即
“max
2n-l
所以^>lghmax/i/A+l]/lg2
执行机构的最大输入电压执行机构的死区电压,死区就是执行机构的灵敏度
2.4.2D/A转换的基本工程化技术
5、D/A转换的标度变换
计算机控制系统前向通道(信号出计算机)
计算机内部
2.4.2D/A转换的基本工程化技术
假设各环节的变换皆为线性变换关系,因此上述过程恰是
A/D变换过程中信号变换的逆过程,因此A/D变换过程的
标度变换公式仍然适用,即
C=(X—4)+c°
4一4
上式中,x为计算机内部计算得到的物理量,即执行
机构输出的物理量,范围为4〜4小c为与x对应的数
字量,即D/A变换前的数字量,范围为〜
2.5z变换
2.5.1z变换的定义
/(o的拉普拉斯变换式为产(s)=L[/«)]=匚山
N)的采样信号为r(of*(t)=£f(kTW(t-kT)一时域
OO
其拉普拉斯变换式为F*3=Ef(kT"skT-S域
k=O
引入一个新的复变量z=e"
oov
Z"⑺]=Z[f(0]=%Z)=Z八kT)z;k-Z域
k=0/\
N序列时刻(时间信息):
时间序列单位延迟因子
(信号幅值信息)
2.5z变换
定义:一个连续的函数可进行拉氏变换,采样后的函
数同样可以进行拉氏变换.
OO
k=0
QZ变换
OO
=F(z)=Zf(kT)z-k
k=0
注:F(z)与/(,)不是一一对应关系,一个/(z)可有无穷多个/⑺与之对
应。
2.5z变换
任何采样时刻为零值的函数夕⑺与/⑺相加,得曲
线/⑺+9(。,将不改变了*⑺的采样值,因而它们的z变
换相同。由此可见,采样函数/*⑺与尸⑶是一一对应关
系,尸⑸与/⑺是一一对应的,而尸(z)与/⑺不是一一对
应关系,一个爪Z)可有无穷多个r⑺与之对应。
2.5.2z变换方法
1、级数求和法
将离散函数r(o展开如下
OO
k=0
二〃o)b⑺+〃T)b”T)+…+)(仃)犯-5)+
然后利用公式直接展开
OO
F(z)=»(kT)z-k(2方
k=0
=/(o).i+/(r)z-1+/(2r)z-2+...+/(^)z^+……
2.5.2z变换万法
例2.1求单位阶跃函数1(t)的z变换
解:单位阶跃函数1(t)在任何采样时刻的值均为1
f(kT)=l(kT)=l,左=0,1,2,……
2.5.2z变换方法
代入式(2.50)中,得:
OO
F(z)=工八4廿=lz°+lz-1+lz~2(2.51)
k=0
将式(2.51)两边乘以z-1,有:
z-1F(z)=z-1+z~2+...+z~k+...(2.52)
上两式相减,得:
F(z)-z-1F(z)=l
1z
所以F(z)=
-1i-z-iz—1
2.5.2z变换方法
例2.2求衰减指数e5的z变换。
解:根据公式可得
aTxkaTk
尸(z)=1+e~z~+e-2心-2+…+e~z~+…
将两边同乘以""z7,得
e~aTz~xF(z)=e~aTz~x+e~laTz~2+...+e~kaTz~k+…
上两式相减,可以求得Nz)(i-"心-|)=1
F(z}=-------------=——-——
')1-邛"1Z—。一江
2.5.2z变换万法
2、部分分式法
设连续函数/⑺的拉氏变换为有理函数,具体形式如
下:M(s)
F(s)=—
N(s)
式中,M(s)与N(s)都是复变量的多项式。
通常无重极点的尸(s)能够分解成如下的部分分式形式:
〃A
尸⑸=E-f-4=(s+。产(sH=_%
Z=1s十/
利用已知的典型函\A,
数Z变换,便可求\-e-aiTz-x
出各个环节的Z变
换。
2.5.2z变换方法
例2.3求F(.)=的z变换
J(DICL)
aj__1
解:/(s)=
s(s+a)SS+Q
1拉氏反变换)]⑺z变换)]
s1-z-1
1拉氏反变换-atZ变换I
s+al-e~aTz-l
(1-/
F(z)=
(l-z-lXl-e-aTz-1)
2.5.2z变换方法
说明:
厂(s)n/⑺n/*«)n尸⑸n尸(z)
sw/lnz
尸(s)口口,AF(z)
5=ylnz
尸*(s)口口AF(z)
求拉氏变换式/(s)的z变换的含义是,将拉氏变换式所
代表的连续函数/⑺进行采样,然后求它的Z变换。为
此,首先应通过拉氏反变换求得连续函数/⑺,然后对
它的采样序列做z变换。
2.5.2z变换方法
数计算法
若已知连续时间函数/⑺的拉氏变换式及全部极点,贝”⑺
的z变换可由下面留数计算公式求得:
b(z)=ZResF(5Z)
z—el
极点上的留数分两种情况求取:
ZZ
(1)单极点情况Re5F(5Z)--=(5-5Z)F(5)--
_z—e1[_z—e
(2)〃阶重极点情况
Re5R(sJ(s—s"(s)
(n-1)!ds
2.5.2z变换方法
1
例2.6求/(s)=的z变换。
(s+l)(s+3)
解:上式有两个单极点邑二-1,邑=-3,加=2,于是
|Z1
F(z)^[(5+1)--]_+[(5+3)——--------。]厂
(S+1)(5+3)Z-严5=1,(S+1)(5+3)Z-产J3
ZZ
=-----------1--------------
2(z—e")(-2)(z-e-3r)
z(e-T-e-3T)
~2(z-e-TXz-e-3T)
2.5.2z变换方法
例23求取人击的%变换。
解:上式有二重极点为2=-。/=2,于是
aT
1d21z]Tze-
厂—(S+Q)
(z)=sT
(2-1)!(S+Q)2Z-e
2.5.3z变换的基本定理
1、线性定理
线性函数满足齐次性和迭加性,若
Z"«)]=片(2)Z[f2(t)]=F2(z)
a、b为任意常数,f(t)=af\S土明(t)
则b(z)=。与(z)±b£(z)
2.5.3z变换的基本定理
2、滞后定理(右位移定理)
Z"(,-U)]=z一〃/(z)+z一〃£代门什
y=-i
如果/<0,/«)=0,贝!]
Z[f(t-nT)]=z-nF(z)
右位移〃了函数〃一江)表示,/(左-〃)相对时间起点延迟
了〃个采样周期。该定理还表明歹⑶经过一个z一〃的
纯滞后环节,相当于其时间特性向后移动〃步。
2.5.3z变换的基本定理
3、超前定理(左位移定理)
n—\
Z[f(t+U)]=z'N(z)—z〃2
7=0
如果/(0T)=〃T)=…=/[(〃—1)T]=0
则Z[/(/+nT)]=z,7F(z)
左位移〃函数/。+江)表示,/(左+〃)相对时间起点超
前n个采样周期出现。该定理还表明尸⑶经过一个z〃
的纯超前环节,相当于其时间特性向前移动〃步。
.2.5.3z变换的基本定理
4、初值定理
如果/⑺的z变换为F(z),而映/⑶存在,则
/(O)=limF(z)
Z—>8
证明:oo
&z)=Ef"=f8+/(7>T+/(而+…
百
limF(z)=/(0)=lim八kT)
z—>ook—>0
2.5.3z变换的基本定理
5、终值定理
如果/⑺的z变换为2z),而(1-zT»(z)在Z平面以原点
为圆心的单位圆上或圆外没有极点,则
lim/(0=limf(kT)=lim(l-z-1)F(z)
t—8k—8z—>1
=lim―—―F(z)=lim(z-l)F(z)
z—>lzz—»1
2.5.3z变换的基本定理
证明:lim(1-z-1)F(z)=limF(z)-z-1limF(z)
z—>lz—>lz—>l
oo
•••F(z)=Zf(kT)zi=/(0)++〃27>-2+…
k=0
oo
z7F(z)=Ef(kT_T)z-k=f(-T)+f*+f(T)z~2+…
k=0
尺z)-z*(z)=[/(0)-/(-7)]+[/⑺-/Ok+,(27)-/(7)]z-2+…
,即lim[F(Z)-z-1F(z)]=f(g)
limf*T)=/(oo)=lim[i_z-i]F(z)
k—8z—1
2.5.3z变换的基本定理
6、求和定理(叠值定理)
在离散控制系统中,与连续控制系统积分相类似的概念叫
k
叠分,用Z/G)来表示
k
如果g(左)=(左二°,1,2,…)
j=。
则G(z)=Z卜(左)]=生f=白尸(z)
1—zz—1
2.5.3z变换的基本定理
7、复域位移定理
如果/⑺的z变换为b(z),〃是常数,则尸(ze±w)=Z[*7X%)]
8、复域微分定理
如果/⑺的z变换为尸(z),则Z[tf(t)]=-Tz^^-
9、复域积分定理
如果/⑺的z变换为尸⑶,贝!JZ[平卜g生U+Hm.
zTzr->0
42.5.3z变换的基本定理
10、卷积定理
两个时间序列(或采样信号)/(A)和g(A),相应的z变换为
F(z)和G(z),当/<0时,f(k)=g(k)=0,/>0的卷积
记为/(左)*第左),其定义为
k8
f(k)*g(k)=£f(k-i
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 中国测色仪行业市场现状分析及竞争格局与投资发展研究报告(2024-2030版)
- 中国汽车金融租赁行业市场现状分析及竞争格局与投资发展研究报告(2024-2030版)
- 中国氯甲酸环戊酯行业现状动态及前景趋势预测研究报告(2024-2030版)
- 中国气泡苏打水行业市场现状分析及竞争格局与投资发展研究报告(2024-2030版)
- 中国杀菌剂行业竞争动态及发展趋势分析研究报告(2024-2030版)
- 产品展示协议合同范本
- 中国无功补偿行业未来趋势及前景动态预测研究报告(2024-2030版)
- 中国摩擦焊机行业现状动态及应用前景预测研究报告(2024-2030版)
- 中国手持消磁器行业发展趋势与投资前景预测研究报告(2024-2030版)
- 中国建筑陶瓷机械行业竞争格局及未来前景预测研究报告(2024-2030版)
- 承包商评价表
- 员工奖惩签认单
- 混凝土强度回弹检测方案完整版
- 麻醉科省级临床重点专科建设项目申报标准
- 高中班团干部培训
- 小学 四年级上册生命、生态与安全教案(常用)(精品)
- 体能训练概论(NSCA)
- 电影专业术语大全(附中英文对照)
- A4线缆标签数据模板
- 互通式立交桥工程施工组织设计
- 第一节无所不在的信息
评论
0/150
提交评论