



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
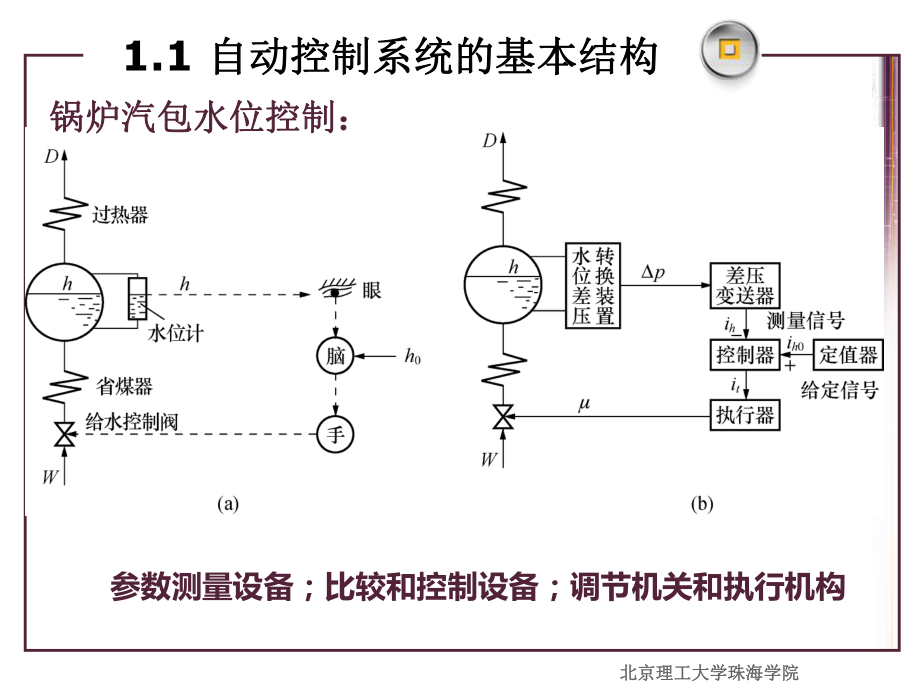
1、热工过程自动控制系统热工过程自动控制系统北京理工大学珠海学院北京理工大学珠海学院锅炉汽包水位控制:锅炉汽包水位控制:1.1 自动控制系统的基本结构自动控制系统的基本结构参数测量设备;比较和控制设备;调节机关和执行机构北京理工大学珠海学院北京理工大学珠海学院自动控制系统的基本结构:自动控制系统的基本结构:1.1 自动控制系统的基本结构自动控制系统的基本结构北京理工大学珠海学院北京理工大学珠海学院v (1)(1)被控量被控量:表征生产过程是否正常而需要控制的物理量。:表征生产过程是否正常而需要控制的物理量。v (2)(2)扰动扰动:引起被控量偏离其给定值的各种原因。:引起被控量偏离其给定值的各种原
2、因。v (3)(3)对象的输入和输出对象的输入和输出:被控对象的生产过程以所有扰动:被控对象的生产过程以所有扰动作为输入,以被调量作为输出。作为输入,以被调量作为输出。v (4)(4)调节量调节量:通过调节器来改变某一个量,使被调量回到期:通过调节器来改变某一个量,使被调量回到期望值。望值。v (5)(5)给定值给定值:根据生产工艺要求,被控量应该达到的数值。:根据生产工艺要求,被控量应该达到的数值。v (6)(6)偏差偏差:期望值和实际被调量之间的差值。:期望值和实际被调量之间的差值。 1.2 自动控制系统的基本参数自动控制系统的基本参数北京理工大学珠海学院北京理工大学珠海学院v 稳态工况稳
3、态工况 平衡状态:平衡状态:运动中的自动调节系统,其输入信号和输出运动中的自动调节系统,其输入信号和输出信号都不随时间变化时。信号都不随时间变化时。 系统的静态特性:系统的静态特性:在系统处于平衡状态时,输出信号和在系统处于平衡状态时,输出信号和引起它变化的输入信号之间的关系。引起它变化的输入信号之间的关系。 静态特性的描述:静态特性的描述:1)描述系统各变量之间关系的数学)描述系统各变量之间关系的数学方程为代数方程;方程为代数方程;2)在输入、输出为直角坐标图上,)在输入、输出为直角坐标图上,用曲线来表示。用曲线来表示。 系统的静态特性表达式可以是系统的静态特性表达式可以是线性方程线性方程或
4、或非线性方程非线性方程。 不是所有的环节都有静态特性,比如:积分环节不是所有的环节都有静态特性,比如:积分环节1.3 控制系统的静态特征和动态特征控制系统的静态特征和动态特征v 系统的动态特性系统的动态特性 系统的静止状态被破坏,系统中各变量随时间发生变化,系统的静止状态被破坏,系统中各变量随时间发生变化,微分方程是表征系统动态特性的一种最基本的数学方程微分方程是表征系统动态特性的一种最基本的数学方程,它不仅包含变量本身它不仅包含变量本身,也包含这些变量的导数也包含这些变量的导数.在自动化工作中,了解系统的静态是必要的,但是了解系统在自动化工作中,了解系统的静态是必要的,但是了解系统的动态更为
5、重要。因为在生产过程中,干扰是客观存在的,的动态更为重要。因为在生产过程中,干扰是客观存在的,是不可避免的,就需要通过自动化装置不断地施加控制作用是不可避免的,就需要通过自动化装置不断地施加控制作用去对抗或抵消干扰作用的影响,从而使被控变量保持在工艺去对抗或抵消干扰作用的影响,从而使被控变量保持在工艺生产所要求控制的技术指标上。生产所要求控制的技术指标上。北京理工大学珠海学院北京理工大学珠海学院1.按给定值的形式分类按给定值的形式分类(1)定值控制系统定值控制系统: 给定值为常数给定值为常数例如例如:汽包锅炉给水自动调节系统中的主蒸汽温度汽包锅炉给水自动调节系统中的主蒸汽温度(2)程序控制系统
6、程序控制系统: 给定值按预定规律变化给定值按预定规律变化给定值是时间的函数给定值是时间的函数,需要有专门程序发送装置需要有专门程序发送装置例如例如:金属热处理的炉温自动调节系统金属热处理的炉温自动调节系统(3)随动控制系统随动控制系统: 给定值随机变化给定值随机变化其数值决定于一些外来因素的变化其数值决定于一些外来因素的变化例如例如:锅炉燃烧过程自动调节时锅炉燃烧过程自动调节时,负荷决定燃料负荷决定燃料,燃料决定空气量燃料决定空气量,负荷的变负荷的变化是不能预订的化是不能预订的1.4 控制系统的分类控制系统的分类北京理工大学珠海学院北京理工大学珠海学院(1)闭环控制系统闭环控制系统: 信号沿箭
7、头方向形成一个闭环信号沿箭头方向形成一个闭环,主要标志是主要标志是反馈反馈,因因此也称此也称反馈系统反馈系统.主要特点主要特点:a)它是它是基于偏差的控制基于偏差的控制,因此,只有当偏差存在时,才会产生控制作,因此,只有当偏差存在时,才会产生控制作用用b)各种扰动,系统都会产生控制作用各种扰动,系统都会产生控制作用c)在调节结束时,可使被控量等于或接近给定值在调节结束时,可使被控量等于或接近给定值d)调节的速度相对缓慢调节的速度相对缓慢1.4 控制系统的分类控制系统的分类2.2.按调节系统的工作方式分类按调节系统的工作方式分类北京理工大学珠海学院北京理工大学珠海学院(2)开环控制系统开环控制系
8、统:调节系统中不存在反馈回路,调节器只是调节系统中不存在反馈回路,调节器只是根据直接或间接反映扰动的输入信号进行调节根据直接或间接反映扰动的输入信号进行调节工作原理工作原理:调节器接受了被调对象受到的扰动信号,按预:调节器接受了被调对象受到的扰动信号,按预定的调节规律立即对被调对象产生一个调节作用,以抵消定的调节规律立即对被调对象产生一个调节作用,以抵消扰动信号对被调量的影响扰动信号对被调量的影响特点:特点:a)由于扰动影响被控量的同时,调节器的调节作用已产生,由于扰动影响被控量的同时,调节器的调节作用已产生,所以所以调节速度相对比较快调节速度相对比较快.b)由于没有被控量的反馈,所以由于没有
9、被控量的反馈,所以调节结束时不能保证被控量调节结束时不能保证被控量等于给定值等于给定值1.4 控制系统的分类控制系统的分类北京理工大学珠海学院北京理工大学珠海学院 闭环系统闭环系统 VS 开环系统开环系统1.4 控制系统的分类控制系统的分类基于反馈调节缓慢调节精确基于扰动调节快速调节粗略北京理工大学珠海学院北京理工大学珠海学院(3) 前馈反馈系统前馈反馈系统:在扰动发生时在扰动发生时,反馈还没有发生时反馈还没有发生时,先由先由前馈部分依据扰动信号进行粗调前馈部分依据扰动信号进行粗调,尽快使调节作用一开始尽快使调节作用一开始就能大致抵消扰动的作用的影响就能大致抵消扰动的作用的影响,而被控量和给定
10、值出现而被控量和给定值出现的一些偏差的一些偏差,则可以由则可以由反馈部分进行细调反馈部分进行细调. 较快的调节速度较快的调节速度 较高的调节质量较高的调节质量1.4 控制系统的分类控制系统的分类北京理工大学珠海学院北京理工大学珠海学院1.评价系统质量的主要特征评价系统质量的主要特征: 稳定稳定,快速快速,准确准确(1)稳定性稳定性1.5 控制系统的质量评定控制系统的质量评定非周期衰减过程非周期衰减过程衰减震荡过程衰减震荡过程等幅震荡过程等幅震荡过程 发散震荡过程发散震荡过程X X?临界稳定状临界稳定状态态北京理工大学珠海学院北京理工大学珠海学院1.5 控制系统的质量评定控制系统的质量评定(1)
11、稳定性稳定性判断的指标判断的指标:1)衰减率衰减率:每经过一个波动周期每经过一个波动周期,被调量波动幅度减少的百被调量波动幅度减少的百分数分数Y1,y3分别是偏离稳定态值的第一分别是偏离稳定态值的第一,第三个波峰幅值第三个波峰幅值该值还可以表征系统稳定裕量该值还可以表征系统稳定裕量,一般取一般取0.750.9.131-yyy.,0;,10系统是不稳定的时系统是稳定的时北京理工大学珠海学院北京理工大学珠海学院1.5 控制系统的质量评定控制系统的质量评定(2)准确性准确性 1)动态偏差是指整个调节过程中被调量偏离给定值的最大偏差值. 2)静态偏差e是指调节过程结束后,被调量与给定值之间的偏差.(3
12、)快速性快速性调节时间调节时间ts: 从被控量受到扰动从被控量受到扰动,过程开始变化直到过程开始变化直到结束所需要的时间结束所需要的时间. 5% or 2% 北京理工大学珠海学院北京理工大学珠海学院本章小结本章小结1 1). .自动控制的基本结构自动控制的基本结构2 2). .自动控制的基本参数自动控制的基本参数被调量被调量扰动扰动对象的输入输出对象的输入输出调节量调节量给定值给定值偏差偏差3 3). .控制系统的特性控制系统的特性静态静态动态动态北京理工大学珠海学院北京理工大学珠海学院本章小结本章小结4 4). . 控制系统的分类控制系统的分类按定值的形式分:定值、程序、随动按定值的形式分:
13、定值、程序、随动按工作方式分:闭环、开环、前馈按工作方式分:闭环、开环、前馈- -反馈反馈5 5). . 控制系统的质量评定控制系统的质量评定稳定性稳定性衰减率衰减率准确性准确性动态偏差动态偏差静态偏差静态偏差快速性快速性调节时间调节时间积分指标积分指标自动控制系统的数学描述自动控制系统的数学描述2v拉氏变换拉氏变换v微分方程微分方程v传递函数传递函数CH2 CH2 自动控制系统的数学描述自动控制系统的数学描述CH2 CH2 自动控制系统的数学描述自动控制系统的数学描述2.1 拉普拉斯变换拉普拉斯变换2.1.1拉式变换的定义拉式变换的定义复平面内实函数x(t)的拉氏变换1-,s ,s(s).,
14、s,x(t)e(s)(t)0st-jjXLdtXxL为实变量为复变量记为的函数变换结果是中的实函数求拉氏变换表示对式中变量:实数变为复数变量:实数变为复数函数:原函数变为象函数函数:原函数变为象函数拉氏反变换拉氏反变换: :已知已知x(tx(t) )的拉氏变换的拉氏变换X(sX(s) )求求x(tx(t),),通常用通常用 表示表示, ,计算式为计算式为: :1L叫做像函数叫做原函数其中X(s),(t),)(21)(L(t)-1 -xdsesXjsXxjjst是一一对应的和X(s)0)(t)(t xCH2 CH2 自动控制系统的数学描述自动控制系统的数学描述拉氏变换存在的条件拉氏变换存在的条件
15、: :dtx0t-(t)e,(2);(1)x(t)使存在一个实数分段连续2.1.2 拉氏变换的主要性质拉氏变换的主要性质线性定理线性定理延迟定理延迟定理复平移定理复平移定理时标变换定理时标变换定理(s)(t)bx(t)2121bXsaXaxLCH2 CH2 自动控制系统的数学描述自动控制系统的数学描述)( )-(t-sXexLsa)(s(t)- XxeLat)( )at(asaXxLCH2 CH2 自动控制系统的数学描述自动控制系统的数学描述微分定理微分定理如果是在零初始条件下,则如果是在零初始条件下,则)()(sXstxLnnn阶导数的拉氏变换阶导数的拉氏变换热工过程经常讨论的是在零初始条件
16、下的情况热工过程经常讨论的是在零初始条件下的情况2.1.2 拉氏变换的主要性质拉氏变换的主要性质积分定理积分定理0tx(t)dt1)(1(t)dtssXsxLCH2 CH2 自动控制系统的数学描述自动控制系统的数学描述)0(1)0(1)(1)()2()1(222xsxssXsdttxL一重积分的拉氏变换一重积分的拉氏变换二二重积分重积分的拉氏变换的拉氏变换零初始条件下的,零初始条件下的,n重积分的拉氏变换重积分的拉氏变换)(1)(sXsdttxLnn tAtttr0,0,0)(和和 1)(t t0)()(0tt 时时,当当)(t CH2 CH2 自动控制系统的数学描述自动控制系统的数学描述。即
17、即积积分分面面积积为为,且且定定义义:11)(000)( dttttt t0)(t 1)( tL CH2 自动控制系统的数学描述自动控制系统的数学描述CH2 CH2 自动控制系统的数学描述自动控制系统的数学描述 0,0,0)(tAttrsAtrL )(stL1)( 1 ACH2 CH2 自动控制系统的数学描述自动控制系统的数学描述CH2 CH2 自动控制系统的数学描述自动控制系统的数学描述 0,0,0)(tAtttr2sAAtL 21stL 1t0ACH2 CH2 自动控制系统的数学描述自动控制系统的数学描述)( 1)(22AtdtdtAdtdtACH2 CH2 自动控制系统的数学描述自动控制
18、系统的数学描述tASintr )(为为角角频频率率。为为振振幅幅, A22sin sAtALCH2 CH2 自动控制系统的数学描述自动控制系统的数学描述2.1.4 拉氏反变换拉氏反变换利用拉普拉斯变换对照表利用拉普拉斯变换对照表,由象函数由象函数X(s)求出原函数求出原函数x(t).象函数象函数X(s)为为s的有理分式时的有理分式时,必须将复杂的拉普拉斯函数式必须将复杂的拉普拉斯函数式X(s)分解成若干个简单函数之和分解成若干个简单函数之和.CH2 CH2 自动控制系统的数学描述自动控制系统的数学描述)(*)(*)(*)()()() s () s () s (2121nnsssssssssss
19、ssBABX主要任务:求主要任务:求*,求出,求出*可以通过查表得到其原函可以通过查表得到其原函数数2.1.4 拉氏反变换拉氏反变换1)当当X(s)具有单实极点时(各个根互不相同)具有单实极点时(各个根互不相同))(A)(A)(A)()()() s () s () s (n221121nnsssssssssssssBABXCH2 CH2 自动控制系统的数学描述自动控制系统的数学描述isssXA)s)(s (iiCH2 CH2 自动控制系统的数学描述自动控制系统的数学描述2.2 系统的动态特性系统的动态特性 稳态时稳态时,该关系为系统的该关系为系统的稳定特性稳定特性,是一个代数函数是一个代数函数
20、.动态时动态时,该关系为系统的该关系为系统的动态特性动态特性,是一个微分方程是一个微分方程.系统系统输入:输入:x输出:输出:y?y=f(x)物理模型物理模型数学模型数学模型CH2 CH2 自动控制系统的数学描述自动控制系统的数学描述2.2 系统的动态特性系统的动态特性-微分方程微分方程vs传递函数传递函数2.2.1 数学模型的建立数学模型的建立)(tur)(tucCRi已知:如右图所示的已知:如右图所示的RC电路,已知电阻阻电路,已知电阻阻值为值为R,电容为,电容为C.当输当输入信号为入信号为ur(t),输),输出信号为出信号为uc(t)时,)时,试写出系统的动态特试写出系统的动态特性方程。
21、性方程。1)写出输入电压和输出电压的差值变化引起的关系式,根)写出输入电压和输出电压的差值变化引起的关系式,根据欧姆定律有:据欧姆定律有:2)设电容两端的初始电压为零,输出信号与)设电容两端的初始电压为零,输出信号与i的关系式为:的关系式为:3)消去中间变量得到)消去中间变量得到)(1-2)()(RtutuicridtCtutc01)()()()()()()() )()()()()(1)(00tutudttduRCtutudttduRCdttutuRCtudtRtutuCturcccrctcrctcrc整理得两边求导CH2 CH2 自动控制系统的数学描述自动控制系统的数学描述RC电路的动态方程
22、式电路的动态方程式静态特性静态特性v建立系统微分方程的步骤:建立系统微分方程的步骤:Step 1:分析系统的工作原理、结构组成,找出:分析系统的工作原理、结构组成,找出相关变量,确定系统的输入量和输出量;相关变量,确定系统的输入量和输出量;Step 2:建立相关变量的函数关系;:建立相关变量的函数关系;Step 3:消去中间变量,得到仅含输入和输出的:消去中间变量,得到仅含输入和输出的微分方程;微分方程;Step 4:将方程整理写成规范形式,输出量放在:将方程整理写成规范形式,输出量放在左边,输入量放在右边,导数的阶次按照降序,左边,输入量放在右边,导数的阶次按照降序,从左到右排列。从左到右排
23、列。CH2 CH2 自动控制系统的数学描述自动控制系统的数学描述CH2 CH2 自动控制系统的数学描述自动控制系统的数学描述2.2.1 数学模型数学模型线性线性定常定常系统的微分方程系统的微分方程xbdtxdbdtxdbdtxdbyadtydadtydadtydammmmnnnnmmnn0110111111CH2 CH2 自动控制系统的数学描述自动控制系统的数学描述2.2.2 传递函数传递函数定义:在零初始条件下:系统的输出的拉氏变换和输入定义:在零初始条件下:系统的输出的拉氏变换和输入的拉氏变换之比。的拉氏变换之比。零初始条件:研究对象是系统受到扰动后,系统的变化零初始条件:研究对象是系统受
24、到扰动后,系统的变化情况,研究的起点就在系统发生变化的那一刻。情况,研究的起点就在系统发生变化的那一刻。0- 0 0+系统没有输入和输出系统没有输入和输出系统处于平衡状态系统处于平衡状态输入函数输入函数r(t)及其各阶导数均为零及其各阶导数均为零输出函数输出函数c(t)及其各阶导数均为零及其各阶导数均为零系统输入在此刻发生变化,输出也变化系统输入在此刻发生变化,输出也变化系统的平衡状态在此刻被打破系统的平衡状态在此刻被打破CH2 CH2 自动控制系统的数学描述自动控制系统的数学描述)()(sXstxLnn2.2.2 传递函数传递函数xbdtxdbdtxdbdtxdbyadtydadtydadt
25、ydammmmnnnnmmnn0110111111对微分方程的两边分别做拉氏变换对微分方程的两边分别做拉氏变换)()()()()()()()(01110111sXbssXbsXsbsXsbsYassYasYsasYsammmmnnnn线性定理线性定理)()(01110111bsbsbsbsXasasasasYmmmmnnnn01110111)()(asasasabsbsbsbsXsYnnnnmmmmCH2 CH2 自动控制系统的数学描述自动控制系统的数学描述01110111)()() s (asasasabsbsbsbsXsYGnnnnmmmmA(s)为系统的特征方程)为系统的特征方程A(s)
26、的根为传递函数的极点)的根为传递函数的极点B(s)=0的根为传递函数的零点的根为传递函数的零点CH2 CH2 自动控制系统的数学描述自动控制系统的数学描述2.2.2 传递函数传递函数) (tur)(tucCRi求下图所示求下图所示RC电路以电路以ur(t)为输入,为输入, uc(t)为输出时的传递函数。为输出时的传递函数。)()()(tutudttduRCrcc)(turG(s)(tuc11)()()()()()(RCssUsUsGsUsUsRCsUrcrccRC电路的传递函数电路的传递函数CH2 CH2 自动控制系统的数学描述自动控制系统的数学描述2.2.2 传递函数传递函数传递函数的物理意
27、义,表示了系统的动态特性,是系统传递函数的物理意义,表示了系统的动态特性,是系统在复频域的数学模型。在复频域的数学模型。特点:特点:1)只适用于线性定常系统;)只适用于线性定常系统;2) 只能表示一个输入对一个输出的关系;只能表示一个输入对一个输出的关系;3)表示系统或环节的固有特性,和输入信号的具体形式、大小无关;)表示系统或环节的固有特性,和输入信号的具体形式、大小无关;便于对同一系统,有不同输入信号时的分析便于对同一系统,有不同输入信号时的分析2.2.3 输入响应法输入响应法1)脉冲响应)脉冲响应CH2 CH2 自动控制系统的数学描述自动控制系统的数学描述当输入信号当输入信号r(t)为单
28、位脉冲函数为单位脉冲函数(t)时,输出信号时,输出信号c(t)叫叫做系统的脉冲响应。做系统的脉冲响应。2)阶跃响应)阶跃响应当输入信号当输入信号r(t)为单位阶跃函数为单位阶跃函数1(t)时,输出信号时,输出信号c(t)叫叫做系统的单位阶跃响应。做系统的单位阶跃响应。CH2 CH2 自动控制系统的数学描述自动控制系统的数学描述2.3 环节的连接方式和典型环节的动态特性环节的连接方式和典型环节的动态特性2.3.1 环节的基本连接方式:串联、并联、反馈。环节的基本连接方式:串联、并联、反馈。v1串联串联两个环节串联后总的传递函数为:两个环节串联后总的传递函数为:)()()()()()()()()(
29、2111sGsGsYsYsXsYsXsYsG)()()(11sXsYsG)()()(12sYsYsG判断标准:前一个环节的输出,是后一个环节的输入判断标准:前一个环节的输出,是后一个环节的输入v 2并联并联)()()()()()()()()()()()(212121sGsGsXsYsXsYsXsYsYsXsYsGCH2 CH2 自动控制系统的数学描述自动控制系统的数学描述CH2 CH2 自动控制系统的数学描述自动控制系统的数学描述)()()(1sEsYsG)()()(21sGsGsGkv3反馈反馈 (1)负反馈联接负反馈联接 G1(s)为前向传递函数为前向传递函数G2(s)为反馈通道传递函数为
30、反馈通道传递函数)()()(2sYsBsGGk(s)为开环传递函数为开环传递函数)(1)()()(1)()()()(1211sGsGsGsGsGsXsYsGk)(-1)()()(-1)()()()(1211sGsGsGsGsGsXsYsGk(2)正反馈联接正反馈联接CH2 CH2 自动控制系统的数学描述自动控制系统的数学描述CH2 CH2 自动控制系统的数学描述自动控制系统的数学描述2.4 物理函数传递函数的推导物理函数传递函数的推导2.4.1 系统的方框图表示系统的方框图表示 v(1)(1)能直观地表达自动控制系统中各设备之间相互能直观地表达自动控制系统中各设备之间相互作用与信号传递关系的示
31、意图称为自动控制系统的作用与信号传递关系的示意图称为自动控制系统的方框图。方框图。v(2)(2)方框图的四个要素方框图的四个要素v信号线:信号线:用箭头表示信号用箭头表示信号“x x”的传递方向的连接线。的传递方向的连接线。v汇交点汇交点 (相加点、综合点相加点、综合点):表示两个信号表示两个信号“x x1 1”与与“x x2 2”的代数和。的代数和。v分支点分支点(引出点引出点):表示把信号表示把信号“x x”分两路取出。分两路取出。v环节:环节:方框图中的一个方框。方框图中的一个方框。方框图的四个要素:方框图的四个要素:CH2 CH2 自动控制系统的数学描述自动控制系统的数学描述系统分析系
32、统分析3v时域分析法时域分析法 分析一阶系统和二阶系统分析一阶系统和二阶系统v劳斯变换劳斯变换CH3 系统分析系统分析v什么是时域分析法?什么是时域分析法?CH3 系统分析系统分析稳定稳定性能性能快速快速性能性能准确准确性能性能v微分方程微分方程CH3 系统分析系统分析线性定常线性定常系统系统xbdtxdbdtxdbdtxdbyadtydadtydadtydammmmnnnnmmnn0110111111CH3 系统分析系统分析v什么是时域分析法?什么是时域分析法?CH3 系统分析系统分析)()()()(001222trbtcadttdcadttcda某调节系统的微分方程某调节系统的微分方程令输
33、入信号令输入信号r(t)为单位阶跃函数,即为单位阶跃函数,即r(t) =1(t)( 1)()()(001222tbtcadttdcadttcda线性方程线性方程非齐次方程非齐次方程这个方程的解这个方程的解c(t)就是在输入信号为单位阶跃函数时,就是在输入信号为单位阶跃函数时,调节系统的时间响应调节系统的时间响应CH3 系统分析系统分析CH3 系统分析系统分析l 稳态过程(平衡过程,静态过程)稳态过程(平衡过程,静态过程):表征系统输出最终跟踪:表征系统输出最终跟踪输入的程度,提供系统稳态误差的信息,反映系统稳态性能。输入的程度,提供系统稳态误差的信息,反映系统稳态性能。 y(t) t 动态动态
34、过程过程动态动态过程过程扰动扰动稳态稳态过程过程稳态稳态过程过程l动态过程(或过渡过程、瞬态过程、暂态过程):动态过程(或过渡过程、瞬态过程、暂态过程):系统在输入系统在输入信号作用下,输出量从初始状态到另一个平衡状态的响应过程,信号作用下,输出量从初始状态到另一个平衡状态的响应过程,可提供系统稳定性、响应速度、阻尼等信息,反映动态性能。可提供系统稳定性、响应速度、阻尼等信息,反映动态性能。CH3 系统分析系统分析v什么是时域分析法?什么是时域分析法?CH3 系统分析系统分析AC系统偏离稳定态值的系统偏离稳定态值的第一第一,第三个波峰幅值第三个波峰幅值(被调量波动幅度)(被调量波动幅度)减少的
35、百分数减少的百分数CH3 系统分析系统分析CCA-stpt0tc(t)( c)(ptc)(02. 0 c)(05. 0 c或或A AB B%100 BAMp%100)()()( cctcMppCH3 系统分析系统分析CH3 系统分析系统分析(1)(1)峰值时间峰值时间tp:响应超过终值到达第一个峰值所需时间:响应超过终值到达第一个峰值所需时间(2)(2)上升时间上升时间tr:响应从零第一次上升到终值所需时间:响应从零第一次上升到终值所需时间 st)(%)()(cctc%的稳态值的稳态值响应稳态值响应稳态值(3)(3)调节时间调节时间ts:响应到达并保持在允许误差带响应到达并保持在允许误差带(如
36、(如2 2或或5 5)内所需的最短时间)内所需的最短时间 CH3 系统分析系统分析v系统的准确性系统的准确性CH3 系统分析系统分析若时间趋于无穷时,系统的输出量不等于输入量或输入量若时间趋于无穷时,系统的输出量不等于输入量或输入量的确定函数,则系统存在稳态误差。通常在阶跃函数、斜的确定函数,则系统存在稳态误差。通常在阶跃函数、斜坡函数或加速度函数作用下进行测定或计算。坡函数或加速度函数作用下进行测定或计算。)(limteetss 理想的控制系统理想的控制系统响应情况:响应情况:超调量超调量小或无超调小或无超调、上升上升时间快时间快、调节时间调节时间短短及及稳态误差小或稳态误差小或为零。为零。
37、05101500.20.40.60.811.21.41.61.8timey期望值期望值 控制系统设计的综合指标考虑:控制系统设计的综合指标考虑:CH3 系统分析系统分析v什么是时域分析法?什么是时域分析法?CH3 系统分析系统分析一阶系统的时域分析一阶系统的时域分析CH3 系统分析系统分析时间常数其中无源网络的传递函数进行拉氏变换得:,假定初始状态为零,,11)()()()()(RCRCssRsCtrtcdttdcRC一阶系统的数学模型一阶系统的数学模型10CH3 系统分析系统分析-一阶系统一阶系统一阶系统的数学模型一阶系统的数学模型CH3 系统分析系统分析-一阶系统一阶系统010)()()(
38、asabsRsCsG1)(TsksG0001,abkaaT一阶微分方程的一般形式一阶微分方程的一般形式一阶微分方程的传递函数一阶微分方程的传递函数传递函数的标准形式传递函数的标准形式其中其中:一阶微分方程的一般形式一阶微分方程的一般形式)()()(001trbtcadttdca一阶微分方程的一般形式一阶微分方程的一般形式T称为时间常数称为时间常数一阶系统的时间响应一阶系统的时间响应单位阶跃响应单位阶跃响应0t ,e1c(t)tTTsksksTsksRsGsCssR?111)()()(1)( , 1) t ( r稳态分量稳态分量输入模态输入模态瞬态分量瞬态分量自由模态自由模态CH3 系统分析系统
39、分析-一阶系统一阶系统一阶系统的时间响应一阶系统的时间响应单位阶跃响应单位阶跃响应0t ,e1c(t)tTTsksksRsGsC?1)()()(稳态分量稳态分量输入模态输入模态瞬态分量瞬态分量自由模态自由模态CH3 系统分析系统分析-一阶系统一阶系统输入函输入函数相关数相关传递函传递函数相关数相关可据此用实验方法测定可据此用实验方法测定T T,或测定系统是否属于一阶或测定系统是否属于一阶系统系统系统辨识系统辨识单调曲线,稳态值为单调曲线,稳态值为K,稳态误差为,稳态误差为0。可以用时间常数可以用时间常数T,来度量系统输出量的数值。来度量系统输出量的数值。响应曲线的初始斜率等于响应曲线的初始斜率
40、等于1/T特点特点响应曲线的斜率随时间推移而下降响应曲线的斜率随时间推移而下降一阶系统单位阶跃响应曲线一阶系统单位阶跃响应曲线0t ,e1c(t)tTCH3 系统分析系统分析-一阶系统一阶系统k1/Tk1/Tk1/T可见:可见: 响应速度与时间常数响应速度与时间常数T 有关。有关。v 稳态性能指标:稳态性能指标: ess=0 98. 0)(/ )(,495. 0)(/ )(,3632. 0)(/ )(,ctcTtctcTtctcTt一阶系统性能指标一阶系统性能指标CH3 系统分析系统分析-一阶系统一阶系统k1/T输出响应达到稳定值的输出响应达到稳定值的63.2%所需的时间所需的时间 5% 误差
41、带误差带 2% 误差带误差带k)(cv Eg:3-1,一阶系统如下图所示:其中,一阶系统如下图所示:其中KK为开环放为开环放大倍数,大倍数,KH为反馈系统。设为反馈系统。设KK=100, KH=0.1,试求系统的调节时间试求系统的调节时间ts(按(按5%误差带误差带 );如果);如果要求要求ts=0.1s,求反馈系统。,求反馈系统。CH3 系统分析系统分析-一阶系统一阶系统解:解:)(1)()()(1)()()()(1211sGsGsGsGsGsXsYsGkCH3 系统分析系统分析-一阶系统一阶系统系统的闭环函数为:系统的闭环函数为:11 . 0101 . 01001100)()()(ssss
42、RsCsT=0.1ts=3T=0.3s若要求若要求ts=0.1s,计算,计算KHCH3 系统分析系统分析-一阶系统一阶系统1s01. 0/11001100)()()(HHHKKKsssRsCsT=0.01/KHKH=0.3v二阶系统的时域分析二阶系统的时域分析CH3 系统分析系统分析二阶系统微分方程的一般形式:二阶系统微分方程的一般形式:)()()()()(0101222trbdttdrbtcadttdcadttcdar(t)为输入函数为输入函数系统的输入系统的输入c(t)为输出函数为输出函数系统的输出系统的输出a2,a1,a0,b1,b2常系数常系数CH3 系统分析系统分析-二阶系统的时域分
43、析二阶系统的时域分析v传递函数传递函数012201)()()(asasabsbsRsCsG?先考虑传递函数分子部分等于常数的情况先考虑传递函数分子部分等于常数的情况01220)()()(asasabsRsCsG?)()()()()(010122sRbssRbsCassCasCsa对两边取拉氏变换,求取传递函数对两边取拉氏变换,求取传递函数拉氏变换的微分性质拉氏变换的微分性质(零初始条件下零初始条件下):)()(sXsdttxdLnnnCH3 系统分析系统分析-二阶系统的时域分析二阶系统的时域分析)()()()()(0101222trbdttdrbtcadttdcadttcdav二阶系统传递函数
44、的通用形式二阶系统传递函数的通用形式01220)()()(asasabsRsCsG?a1,a2符号相同符号相同0002120n,2,abKaaaaa二阶系统的二阶系统的无阻尼自然无阻尼自然振荡频率振荡频率二阶系统的二阶系统的阻尼比阻尼比放大系数放大系数2222)(nnnssKsG标准式标准式CH3 系统分析系统分析-二阶系统的时域分析二阶系统的时域分析0222nnss122, 1 nnsaacbbscbsas24022二次三项式求根公式:CH3 系统分析系统分析-二阶系统的时域分析二阶系统的时域分析 (-,0););0;(;(0,1););1;(;(1,+ )CH3 系统分析系统分析-二阶系统
45、的时域分析二阶系统的时域分析无阻尼无阻尼=00th(t)1js平面平面n n s1s2欠阻尼欠阻尼0 1第一种情况第一种情况 00 1 过阻尼过阻尼 响应较慢地单调收敛响应较慢地单调收敛 第三种情况第三种情况 = 0 =0 无阻尼无阻尼 响应等幅振荡响应等幅振荡 122, 1nns第二种情况第二种情况 0 -1 0 响应振荡发散响应振荡发散 -1 响应单调发散响应单调发散CH3 系统分析系统分析-二阶系统的时域分析二阶系统的时域分析 1 02468101200.20.40.60.811.21.41.61.820.30.30.50.5ntc( t) 工程上通常取工程上通常取=0.40.8CH3
46、系统分析系统分析-二阶系统的时域分析二阶系统的时域分析10 22, 11 nnjsn 21 nd)sin(111)(2tetcdt21 ndn 阶跃响应呈指数衰减(阻尼正弦)振荡,周期阶跃响应呈指数衰减(阻尼正弦)振荡,周期性地趋于稳态输出性地趋于稳态输出h( ) 系统稳定系统稳定。CH3 系统分析系统分析-二阶系统的时域分析二阶系统的时域分析10)( tct)10( n nncos 22, 11 nnjsn 21 ndn 21 nj21 njn j CH3 系统分析系统分析-典型二阶系统的性能指标典型二阶系统的性能指标0, )sin(11)(2 ttetcdtn rtt 1)( rtc21a
47、rctan,其中上升时间drtrt)10( 增大增大 或减小或减小 ,均能减小,均能减小 ,从而加快系统的初始响应速度。从而加快系统的初始响应速度。n rtCH3 系统分析系统分析-典型二阶系统的性能指标典型二阶系统的性能指标0, )sin(11)(2 ttetcdtn pt0)cos(1)sin(1)(22 pddtpdtntttetedttdcpnpnp21 ndptptCH3 系统分析系统分析-典型二阶系统的性能指标典型二阶系统的性能指标%100%100)()()(21 ecctcMpp 最大超调量最大超调量pM221211)sin(11)( eetcp00.10.20.30.40.50
48、.60.70.80.910102030405060708090100 pM%10021 eMp CH3 系统分析系统分析-典型二阶系统的性能指标典型二阶系统的性能指标 调节时间调节时间st%)sin(12 tedtn0, )sin(11)(2 ttetcdtn nst %)1ln(2 10)(tctstst 211 tne 112 4912. 3)02. 0ln( 3996. 2)05. 0ln( nst %)1ln(2 时当时当52,3,4nnst8 . 00 1 st0 10 )10( %10021 eMppM 。,一定时,一定时,当当, snnnstt )3(4或8 . 04 . 0 7
49、07. 021 )(sR )1( TssK)(sCsTK25. 016 , pM%16 pMn st2222221)(nnnssTKsTsTKKsTsKs TTKnn122 25. 025. 0162121)/(825. 016KTsradTKn 0.5, 解得%,16%10021eMp45 . 025. 0414122 TK%44%10021 eMp )%5( ,5.1825.033)%2( ,2825.044误误差差带带取取误误差差带带取取sstnns 劳斯稳定判据劳斯稳定判据CH3 系统分析系统分析CH3 系统分析系统分析-劳斯稳定判据劳斯稳定判据CH3 系统分析系统分析-劳斯稳定判据劳
50、斯稳定判据01110 nnnnasasasa在利用劳斯判据对系统的稳定性判断前,先做该判断在利用劳斯判据对系统的稳定性判断前,先做该判断j 0CH3 系统分析系统分析-劳斯稳定判据劳斯稳定判据, 00110aasasa 10,aa0202112, 1212024, 0aaaaasasasa 210,aaaCH3 系统分析系统分析-劳斯稳定判据劳斯稳定判据CH3 系统分析系统分析-劳斯稳定判据劳斯稳定判据01110 nnnnasasasaCH3 系统分析系统分析-劳斯稳定判据劳斯稳定判据01110 nnnnasasasa1321321321531420gdddcccbbbaaaaaa04321s
51、sssssnnnnn CH3 系统分析系统分析-劳斯稳定判据劳斯稳定判aaaaaaaaabaaaaaaaaabaaaaaaaaab 1321321321531420gdddcccbbbaaaaaa04321ssssssnnnnn CH3 系统分析系统分析-劳斯稳定判据劳斯稳定判据11231121311bababbbbaac 11351131512bababbbbaac 11471141713bababbbbaac 1321321321531420gdddcccbbbaaaaaa04321ssssssnnnnn CH3
52、 系统分析系统分析-劳斯稳定判据劳斯稳定判据CH3 系统分析系统分析-劳斯稳定判据劳斯稳定判据CH3 系统分析系统分析-劳斯稳定判据劳斯稳定判据0122234 ssss 22 0 001002202)( 002211101234sssss CH3 系统分析系统分析-劳斯稳定判据劳斯稳定判据CH3 系统分析系统分析-劳斯稳定判据劳斯稳定判据CH3 系统分析系统分析-劳斯稳定判据劳斯稳定判据0161620128223456 ssssss3456ssss000001612201612216208108624 ss01243 ss033 ss0123ssss83183031CH3 系统分析系统分析-劳
53、斯稳定判据劳斯稳定判据0161620128223456 ssssss0)4)(2(22 ss08624 ss2,24,32, 1jsjs CH3 系统分析系统分析-劳斯稳定判据劳斯稳定判据05432234 ssss56514253101234 sssss)40( , 0 iaiCH3 系统分析系统分析-劳斯稳定判据劳斯稳定判据KsssKsssKsssKs 158)5)(3(1)5)(3()(23015823 Ksss)5)(3( sssK )(sR)(sCKKKssss812081510123 0 K1200012008120 KKKK有120 LK015823 Ksss jaa: 给定稳定度
54、给定稳定度as aazs aa ja068523 sss022, 06) 1( 8) 1( 5) 1(2323 zzzzzz即022110123zzzz1z1z0222 z12, 1jz 辅辅助助方方程程的的解解为为1 zsv 调节系统如下图所示:若要求闭环特征方程的实部小于调节系统如下图所示:若要求闭环特征方程的实部小于-1,问,问K值应取什么范围?如果要求实部均小于值应取什么范围?如果要求实部均小于-2,情,情况又如何?况又如何?CH3 系统分析系统分析-劳斯稳定判据劳斯稳定判据解:解:该系统的闭环传递函数为:该系统的闭环传递函数为:0)10(36, 10189189)()()(12131
55、12323KsssssKsssKsssKsRsCsG代入上式,得:令闭环特征方程为:CH3 系统分析系统分析-劳斯稳定判据劳斯稳定判据10-62810-63101112131KKKssss00628010-KKK1028 KCH3 系统分析系统分析-劳斯稳定判据劳斯稳定判据若要求系统特征根的实部均小于若要求系统特征根的实部均小于-2,令,令s=s1-2,得如下新的特征方程:得如下新的特征方程:CH3 系统分析系统分析0)8(6312131KsssS1前系数为负,无论前系数为负,无论K取多少,系统特征根的实部不可取多少,系统特征根的实部不可能小于能小于-2CH3 系统分析系统分析-劳斯稳定判据劳
56、斯稳定判据作业:调节系统如下图所示:作业:调节系统如下图所示:(1)确定系统稳定时,确定系统稳定时,K值的值的范围;(范围;(2)如果要求闭环系统的根全部位于)如果要求闭环系统的根全部位于s=-1垂线垂线之左,之左,K值范围应取多大?值范围应取多大?CH3 系统分析系统分析-劳斯稳定判据劳斯稳定判据北京理工大学珠海学院北京理工大学珠海学院热工过程自动调节系统的分析和整定热工过程自动调节系统的分析和整定4热工过程自动调节系统的分析和整定热工过程自动调节系统的分析和整定v热工对象的动态特性热工对象的动态特性v三种基本调节规律三种基本调节规律vPID调节器调节器v单回路调节系统和串级调节的整定方法单
57、回路调节系统和串级调节的整定方法热工对象的动态特性热工对象的动态特性v控制系统设计任务:根据控制系统设计任务:根据被控对象的动态特性被控对象的动态特性,选择和设计控制器选择和设计控制器使系统满足规定的性能指标。使系统满足规定的性能指标。v被控对象的动态特性:被控对象的动态特性: 1)不振荡环节)不振荡环节 2)有无自平衡能力)有无自平衡能力 3)被调量与调节对象的关系)被调量与调节对象的关系v选择控制:选择控制:1)PID控制器控制器 2)P、PI、PD控制器控制器v设计控制器:设计控制器:调节比例带、积分时间、微分时间三调节比例带、积分时间、微分时间三个参数,使系统性能最优个参数,使系统性能
58、最优热工对象的动态特性热工对象的动态特性v热工对象的共同特点:热工对象的共同特点:1)不振荡环节(安全运行的要求);)不振荡环节(安全运行的要求);2)热工对象内部过程的物理性能比较复杂)热工对象内部过程的物理性能比较复杂通过实验来获得对象的动态特性通过实验来获得对象的动态特性tthBAt0t0t0hh有自平衡能力有自平衡能力无自平衡能力无自平衡能力阶跃响应阶跃响应v(1)、具有一个被调量的对象)、具有一个被调量的对象 v通道:对象的输入量至输通道:对象的输入量至输出量的信号联系;出量的信号联系;v控制通道:控制作用到输出量控制通道:控制作用到输出量(被调量被调量)的信号的信号联系;联系;v干
59、扰通道:干扰作用至输出量的信号联系;干扰通道:干扰作用至输出量的信号联系;热工对象的动态特性热工对象的动态特性3)被调量与调节对象的关系)被调量与调节对象的关系热工对象的动态特性热工对象的动态特性v内扰内扰: 经过调节通道作用到对象上的扰动称为经过调节通道作用到对象上的扰动称为“内部内部扰动扰动”或或“基本扰动基本扰动” ;v外扰外扰: 经过干扰通道作用到对象上的扰动称为经过干扰通道作用到对象上的扰动称为“外部外部扰动扰动”;不同信号通道的传递函数不同信号通道的传递函数(或微分方程或微分方程)不同不同 热工对象的动态特性热工对象的动态特性扰动扰动是随机的、短暂的、一次发生的,它的是随机的、短暂
60、的、一次发生的,它的动态特性只影响动态特性只影响被调量的幅值被调量的幅值调节通道的动态特性是整定调节系统的依据调节通道的动态特性是整定调节系统的依据认为无自平衡能力对象的自平衡率为认为无自平衡能力对象的自平衡率为=0,那么,那么所有的热工对象都可以用以下三个特征参数来所有的热工对象都可以用以下三个特征参数来描述描述1)飞升速度)飞升速度:在单位阶跃扰动下,输出在单位阶跃扰动下,输出y(t)的的最大变化速度。最大变化速度。2)自平衡率)自平衡率:表征对象的自平衡能力表征对象的自平衡能力3)延迟时间)延迟时间:y(t)的渐近线在时间轴上所截取的长的渐近线在时间轴上所截取的长度。度。用特征参数近似表
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 2025-2030中国柔性太阳能电池行业市场发展趋势与前景展望战略研究报告
- 2025-2030中国木质隔断墙行业市场现状供需分析及投资评估规划分析研究报告
- 2025-2030中国服装行业市场现状供需分析及投资评估规划分析研究报告
- 2025-2030中国有机谷物饮料行业发展分析及发展前景与趋势预测研究报告
- 2025-2030中国暖气通风和空调(HVAC)行业市场发展趋势与前景展望战略研究报告
- 2025-2030中国智能灯开关行业市场现状供需分析及投资评估规划分析研究报告
- 2025-2030中国无机胶粘剂行业市场深度分析及发展趋势与投资研究报告
- 竞业限制合同一7篇
- 水运物流信息系统的构建与应用考核试卷
- 电机在通信设备中的应用考核试卷
- 2025届山东省菏泽市高三下学期一模政治试题及答案
- 乒乓球爱好者如何制定乒乓球训练计划
- 2025年湖南省长沙市长郡教育集团九年级下学期第一次学情分析(中考一模)语文试题(含解析)
- 江西南昌市2025届高三语文一模作文:对“差不多”“尽力了”的思考
- 【语文】《青蒿素:人类征服疾病的一小步》《一名物理学家的教育历程》课件2024-2025学年统编版高一语文必修下册
- 初级社工师《社会工作实务》考试(重点)题库300题(含答案解析)
- 高速涡轮牙钻手机行业市场发展及发展趋势与投资战略研究报告
- 2025哈尔滨亚洲冬季运动会主题宣讲课件
- 《某连锁药店销售培训教材》183
- 2025年中国装配式钢结构行业市场前瞻与投资战略规划分析报告
- 2024年第四季度 国家电网工程设备材料信息参考价
评论
0/150
提交评论