



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
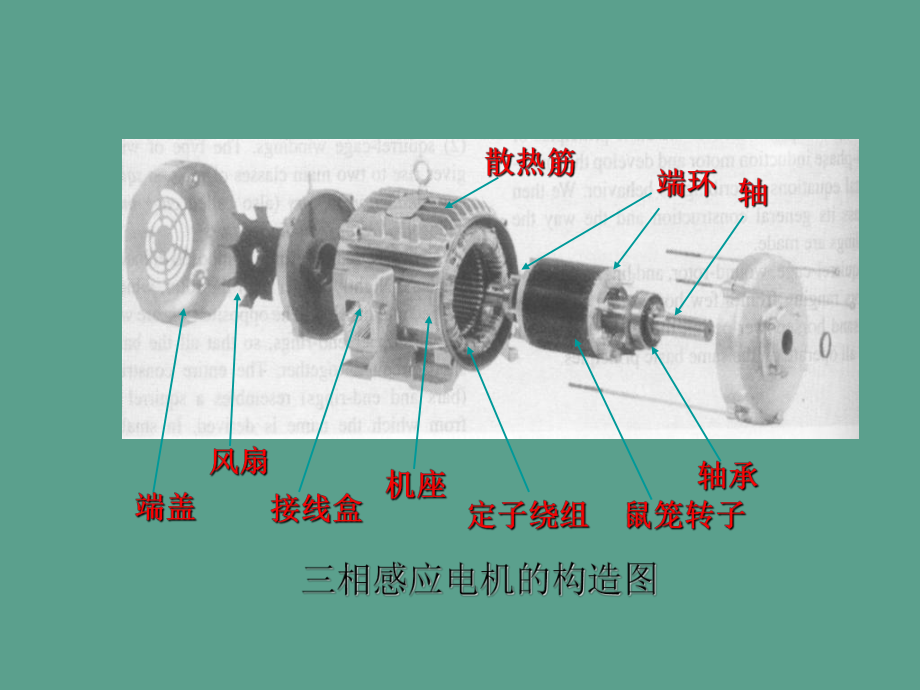
1、第六章异步电动机调速系统学习要点:学习要点: 1、掌握三相异步电动机的构造和旋转原理、掌握三相异步电动机的构造和旋转原理 2、了解三相异步电动机的机械特性、了解三相异步电动机的机械特性 3 、 三相异步电动机的调速原理三相异步电动机的调速原理 4、三相异步电动机的矢量控制、三相异步电动机的矢量控制重点! 一、三相异步电动机的构造和原理一、三相异步电动机的构造和原理三相感应电动机定子气隙转子机座端盖转子铁心轴转子绕组定子铁心定子绕组鼠笼型绕线型 导体用铜条或铝条,两头用端环联接。构造可靠简单,导体用铜条或铝条,两头用端环联接。构造可靠简单,但是转子电阻固定。但是转子电阻固定。 接成接成Y型的三相
2、绕组经过滑环和电刷与外电路联型的三相绕组经过滑环和电刷与外电路联接,便于串入电阻改善电动机的运转性能。接,便于串入电阻改善电动机的运转性能。ABCCBAit1AZBXCY2 3 45 6e2, i2电流从首端流入、末电流从首端流入、末端流出时为正。端流出时为正。 1、在三相对称绕组中通入三相对称的电流会在气隙中构成一个旋转磁场。 2、旋转磁场的转速同步速: 3、改动通入电流的相序对调恣意两根电源线就可以改动旋转磁场的转向,从而改动电机的转向。pfn1160 1、三相感应电动机的转速恒小于磁场转速,即、三相感应电动机的转速恒小于磁场转速,即n n1,故称异步电机。故称异步电机。 2、转差、转差即
3、转子与旋转磁场之间存在相对即转子与旋转磁场之间存在相对运动,是感应电动机稳定运转的必要条件。运动,是感应电动机稳定运转的必要条件。 3、转差率定义为转差与同步速之比、转差率定义为转差与同步速之比其大小反映了电机的转速,即其大小反映了电机的转速,即01nnn11/nnnS11nSn21222211123/2epU rsTrfrxxs其中:p为电机极对数; U1为相电压有效值 r1为定子每相绕组的内阻 x1为每相漏阻抗 r2为折算到定子侧的每相电阻 x2为折算到定子侧的漏电阻机械特性曲线机械特性曲线)(nfT 11nSn)(SfT 1nnT0感应电机的机械特性mSS011n2NnmmTTSS,QT
4、TSn, 1, 0D理想空载点理想空载点额定运转点额定运转点mTB最大转矩点最大转矩点起起 动动 点点NTCAQT0, 0,1TSnnNNNTTSSnn, 三相异步电动机的调速三相异步电动机的调速交流调速方式)1 (60)1 (11SpfnSn耗能型有级调速设备费用高异步电动机的变极调速A1X1X2A2AXAXAXAXA1X1X2A2AX异步电动机的变频调速调速原理fpfn601延续可调延续可调1n、 延续可调延续可调n主要设备变频器V1V3V5V4V6V22dcU2dcUM可调可调fUabc,dcU),(11constfUffN同步点:同步点:最大转矩点:最大转矩点:起动点:起动点:11fn
5、 2111)(,1fUTfSmm不变不变11211312111)(fffUfUTQ最大转矩对应的转速降:最大转矩对应的转速降:ppffnSnmm1601111mn不变不变Nff 1Um弱磁调速弱磁调速QmTTnT0S11nQTNfmnmn1n1f 1n 1fmT 1nNff 1 mnZT改动转差率调速调压调速nT0S1mT1nNUmS1U 1UNUUU1 1ZT2knTZ1n1U21UTmmS不变不变21UTQ不变不变n改动转差率调速绕线式感应电动机转子串电阻调速RmTmS不变不变QT1n不变不变nnT0S1mTmS1nQT2r2 RrQTmSZTZT轻载调速轻载调速范围不大范围不大调速前:调
6、速前:1,S1调速后:调速后:2,S2 按转子磁场定向按转子磁场定向主要内容主要内容 PWM控制技术 异步电机坐标变换 异步电动机的矢量控制系统 三相异步电动机的矢量控制实战PWM控制技术 异步电动机变频调速需求电压与频率均可异步电动机变频调速需求电压与频率均可调的交流电源,常用的交流可调电源是由调的交流电源,常用的交流可调电源是由电力电子器件构成的静止式功率变换器,电力电子器件构成的静止式功率变换器,普通称为变频器。采用的控制技术有:普通称为变频器。采用的控制技术有:正弦波脉宽调制技术电流跟踪PWM控制技术电压空间矢量PWM控制技术正弦波脉宽调制技术 以频率与期望的输出电压波一样的正弦波作以
7、频率与期望的输出电压波一样的正弦波作为调制波以频率比期望波高得多的等腰三角为调制波以频率比期望波高得多的等腰三角波作为载波,当调制波与载波相交时,由它波作为载波,当调制波与载波相交时,由它们的交点确定逆变器开关器件的通断时辰,们的交点确定逆变器开关器件的通断时辰,从而获得高度相等、宽度按正弦规律变化的从而获得高度相等、宽度按正弦规律变化的脉冲序列,这种调制方法称作正弦波脉宽调脉冲序列,这种调制方法称作正弦波脉宽调制制SPWM 三相三相PWM逆逆变器双极性变器双极性SPWM波形波形电流跟踪PWM控制技术 电流跟踪电流跟踪PWMCFPWM,Current Follow PWM的控制方法是:在原来的
8、控制方法是:在原来主回路的根底上,采用电流闭环控制,主回路的根底上,采用电流闭环控制,使实践电流快速跟随给定值,在稳态时,使实践电流快速跟随给定值,在稳态时,尽能够使实践电流接近正弦波形,这就尽能够使实践电流接近正弦波形,这就能比电压控制的能比电压控制的SPWM获得更好的性能。获得更好的性能。电流滞环跟踪控制原理图电流滞环跟踪控制原理图图图4-13电流滞环跟踪控制的电流滞环跟踪控制的A相原理图相原理图 如图,电流如图,电流滞环跟踪控滞环跟踪控制时的三相制时的三相电流波形与电流波形与相电压相电压PWM波形波形电流滞环跟踪控制电流滞环跟踪控制 电流跟踪控制的精度与滞环的宽度有关,电流跟踪控制的精度
9、与滞环的宽度有关,同时还遭到功率开关器件允许开关频率的同时还遭到功率开关器件允许开关频率的制约。当环宽选得较大时,开关频率低,制约。当环宽选得较大时,开关频率低,但电流波形失真较多,谐波分量高;假设但电流波形失真较多,谐波分量高;假设环宽小,电流跟踪性能好,但开关频率却环宽小,电流跟踪性能好,但开关频率却增大了。实践运用中,应在器件开关频率增大了。实践运用中,应在器件开关频率允许的前提下,尽能够选择小的环宽。允许的前提下,尽能够选择小的环宽。电压空间矢量PWM控制技术 把逆变器和交流电动机视为一体,以圆形把逆变器和交流电动机视为一体,以圆形旋转磁场为目的来控制逆变器的任务,这旋转磁场为目的来控
10、制逆变器的任务,这种控制方法称作种控制方法称作“磁链跟踪控制,磁链轨磁链跟踪控制,磁链轨迹的控制是经过交替运用不同的电压空间迹的控制是经过交替运用不同的电压空间矢量实现的,所以又称矢量实现的,所以又称“电压空间矢量电压空间矢量PWMSVPWM,Space Vector PWM控制。控制。交交-直直-交交PWM变频器主回路变频器主回路交交-直直-交变频器主回路构造图交变频器主回路构造图空间矢量的定义空间矢量的定义 电压空间矢量的定义电压空间矢量的定义2jCOjBOAOeueuuCOBOAOuuu32三相合成矢量三相合成矢量图图 电压空间矢量电压空间矢量2jCOjBOAOeueuuCOBOAOsu
11、uuu0AOu0BOu0COu三相平衡正弦电压合成矢量三相平衡正弦电压合成矢量 是一个以电源角频率是一个以电源角频率 为电气角速度作恒速为电气角速度作恒速旋转的空间矢量,它的幅值不变,是相电压幅值旋转的空间矢量,它的幅值不变,是相电压幅值的的3/2倍,当某一相电压为最大值时,合成电压倍,当某一相电压为最大值时,合成电压矢量就落在该相的轴线上。矢量就落在该相的轴线上。tjstjmjmjmmeueUetUetUtU1123)34cos()32cos()cos(2111COBOAOsuuuusu1同理,定子电流和磁链的空间矢量同理,定子电流和磁链的空间矢量 2jCOjBOAOeieiiCOBOAOs
12、iiii2jCOjBOAOeeCOBOAOs电压与磁链空间矢量的关系电压与磁链空间矢量的关系 当异步电动机的三相对称定子绕组由三相电当异步电动机的三相对称定子绕组由三相电压供电时,对每一相都可写出一个电压平衡压供电时,对每一相都可写出一个电压平衡方程式,求三相电压平衡方程式的矢量和,方程式,求三相电压平衡方程式的矢量和,即得用合成空间矢量表示的定子电压方程式即得用合成空间矢量表示的定子电压方程式dtdRssssiu电压与磁链空间矢量的关系电压与磁链空间矢量的关系 当电动机转速不是很低时,定子电阻压当电动机转速不是很低时,定子电阻压降所占的成分很小,可忽略不计,那么降所占的成分很小,可忽略不计,
13、那么定子合成电压与合成磁链空间矢量的近定子合成电压与合成磁链空间矢量的近似关系为似关系为dtdssu dtssu或或 电压与磁链空间矢量的关系电压与磁链空间矢量的关系 当电动机由三相平衡正弦电压供电时,当电动机由三相平衡正弦电压供电时,电动机定子磁链幅值恒定,其空间矢量电动机定子磁链幅值恒定,其空间矢量以恒速旋转,磁链矢量顶端的运动轨迹以恒速旋转,磁链矢量顶端的运动轨迹呈圆形简称为磁链圆,电机学里已指呈圆形简称为磁链圆,电机学里已指出。定子磁链旋转矢量出。定子磁链旋转矢量)(1tjses电压与磁链空间矢量的关系电压与磁链空间矢量的关系 上式对上式对t求导得求导得 )2(1)(1)(111)(t
14、jstjstjseejedtdsu 磁链幅值等于电压与频率之比,方向与磁磁链幅值等于电压与频率之比,方向与磁链矢量正交,即磁链圆的切线方向,如下链矢量正交,即磁链圆的切线方向,如下图。图。电压与磁链空间矢量的关系电压与磁链空间矢量的关系 图图 旋转磁场与电压空间旋转磁场与电压空间矢量的运动轨迹矢量的运动轨迹图图 电压矢量圆轨迹电压矢量圆轨迹PWM逆变器根本输出电压矢量逆变器根本输出电压矢量 直流电源中点直流电源中点O和交流电动机中点和交流电动机中点O的电位不等,的电位不等,但合成电压矢量的表达式相等。因此,三相合成但合成电压矢量的表达式相等。因此,三相合成电压空间矢量与参考点无关。电压空间矢量
15、与参考点无关。22222)1 ()()()(jCjBAjjOOjCjBAjOOCjOOBOOAjCOjBOAOeueuueeueueuueuueuuuueueuuCOBOAOsuuuu为0PWM逆变器根本输出电压矢量逆变器根本输出电压矢量 PWM逆变器共有逆变器共有8种任务形状,当种任务形状,当 , , =1,0,0时,时, , , = , , ,代入,代入式得式得2dUASBSCSAuBuCu2dU2dUddjjdjjdUjUeeUeeU)34sin32(sin)34cos32cos1(2)1 (2)1 (2343221uPWM逆变器根本输出电压矢量逆变器根本输出电压矢量 当当 , , =1
16、,1,0时,时, , , = , , ,得,得2dUASBSCSAuBuCu2dU2dU334322)31 (2)34sin32(sin)34cos32cos1(2)1 (2)1 (2jdddjjdjjdeUjUjUeeUeeU2uPWM逆变器根本输出电压矢量逆变器根本输出电压矢量 依此类推,可得依此类推,可得8个根本空间矢量,个根本空间矢量,其中其中6个有效任务矢量个有效任务矢量 ,幅值,幅值为直流电压为直流电压 ,在空间互差,在空间互差 。 另另2个为零矢量个为零矢量 和和 。1u6udU30u7uPWM逆变器根本输出电压矢量逆变器根本输出电压矢量 图图 根本电压空间矢量图根本电压空间矢量
17、图正六边形空间旋转磁场正六边形空间旋转磁场 6个有效任务矢量按至的顺序分别作用时间个有效任务矢量按至的顺序分别作用时间 162tt31n每个有效任务矢量作用每个有效任务矢量作用/3 弧度,弧度,6个有效任个有效任务矢量完成一个周期,输出基波电压角频率务矢量完成一个周期,输出基波电压角频率 13t正六边形空间旋转磁场正六边形空间旋转磁场 在时间在时间t内,定子磁链矢量的增量为内,定子磁链矢量的增量为k=1,2,3,4,5,6 。3)1()()(kjdssetUtkku 定子磁链矢量的增量方向与电压矢量一样,定子磁链矢量的增量方向与电压矢量一样,幅值等于直流侧电压与作用时间的乘积。幅值等于直流侧电
18、压与作用时间的乘积。 dtssu正六边形空间旋转磁场正六边形空间旋转磁场 定子磁链矢量的运动定子磁链矢量的运动轨迹为轨迹为tkkkkksssss)() 1()() 1()(u) 1( k)(ktkks)()(u图图 定子磁链矢量增量与电压矢量和时定子磁链矢量增量与电压矢量和时间增量的关系间增量的关系正六边形空间旋转磁场正六边形空间旋转磁场 图为正六边形定子磁图为正六边形定子磁链轨迹链轨迹正六边形空间旋转磁场正六边形空间旋转磁场 由正六边形的性质可知由正六边形的性质可知 n正六边形定子磁链的大小与直流侧电压成正正六边形定子磁链的大小与直流侧电压成正比,而与电源角频率成反比。在基频以下调比,而与电
19、源角频率成反比。在基频以下调速时,应坚持正六边形定子磁链的最大值恒速时,应坚持正六边形定子磁链的最大值恒定定 。 13| )(| )(| )(|ddssUtUtkkku正六边形空间旋转磁场正六边形空间旋转磁场 要坚持正六边形定子磁链不变,必需使要坚持正六边形定子磁链不变,必需使 为常数,这意味着在变频的同时必需调理为常数,这意味着在变频的同时必需调理直流电压,呵斥了控制的复杂性。直流电压,呵斥了控制的复杂性。 有效的方法是插入零矢量,使有效任务矢有效的方法是插入零矢量,使有效任务矢量的作用时间仅为量的作用时间仅为 ,其他的时间,其他的时间。 1dUtt1用零矢量来补。用零矢量来补。10ttt正
20、六边形空间旋转磁场正六边形空间旋转磁场 在直流电压不变的条件下,要坚持在直流电压不变的条件下,要坚持 恒定,恒定,只需使只需使 为常数。为常数。 零矢量的插入有效地处理了定子磁链矢量幅值与零矢量的插入有效地处理了定子磁链矢量幅值与旋转速度的矛盾。旋转速度的矛盾。| )(|ks1t正六边形空间旋转磁场正六边形空间旋转磁场 在时间段在时间段 内,定子磁链矢量轨迹沿着内,定子磁链矢量轨迹沿着有效任务电压矢量方向运转。有效任务电压矢量方向运转。 在时间段在时间段 内,零矢量起作用,定子磁内,零矢量起作用,定子磁链矢量轨迹停留在原地,等待下一个有效链矢量轨迹停留在原地,等待下一个有效任务矢量的到来。任务
21、矢量的到来。 电源角频率越低,零矢量作用时间也越大,电源角频率越低,零矢量作用时间也越大,定子磁链矢量轨迹停留的时间越长。定子磁链矢量轨迹停留的时间越长。 1t0t期望电压空间矢量的合成与期望电压空间矢量的合成与SVPWM控制控制 每个有效任务矢量在一个周期内只作用一每个有效任务矢量在一个周期内只作用一次的方式只能生成正六边形的旋转磁场,次的方式只能生成正六边形的旋转磁场,与在正弦波供电时所产生的圆形旋转磁场与在正弦波供电时所产生的圆形旋转磁场相差甚远,六边形旋转磁场带有较大的谐相差甚远,六边形旋转磁场带有较大的谐波分量,这将导致转矩与转速的脉动。波分量,这将导致转矩与转速的脉动。SVPWM根
22、本思想根本思想 要获得更多边形或接近圆形的旋转磁场,要获得更多边形或接近圆形的旋转磁场,就必需有更多的空间位置不同的电压空间就必需有更多的空间位置不同的电压空间矢量以供选择,但矢量以供选择,但PWM逆变器只需逆变器只需8个根个根本电压矢量,能否用这本电压矢量,能否用这8个根本矢量合成其个根本矢量合成其他多个矢量他多个矢量? 答案是一定的,按空间矢量的平行四边形答案是一定的,按空间矢量的平行四边形合成法那么,用相邻的两个有效任务矢量合成法那么,用相邻的两个有效任务矢量合成期望的输出矢量,这就是电压空间矢合成期望的输出矢量,这就是电压空间矢量量PWMSVPWM的根本思想。的根本思想。SVPWM根本
23、思想根本思想 按按6个有效任务矢量将电压矢量空间分为对个有效任务矢量将电压矢量空间分为对称的六个扇区,每个扇区对应称的六个扇区,每个扇区对应/3,当期,当期望的输出电压矢量落在某个扇区内时,就望的输出电压矢量落在某个扇区内时,就用该扇区的两条边等效合成期望的输出矢用该扇区的两条边等效合成期望的输出矢量。量。 所谓等效是指在一个开关周期内,产生的所谓等效是指在一个开关周期内,产生的定子磁链的增量近似相等。定子磁链的增量近似相等。电压空间矢量的电压空间矢量的6个扇区个扇区图图 电压空间矢量的电压空间矢量的6个扇区个扇区期望电压空间矢量的合成期望电压空间矢量的合成 以 期 望 输 出 矢以 期 望
24、输 出 矢量落在第量落在第I扇区扇区为 例 , 分 析 电为 例 , 分 析 电压 空 间 矢 量压 空 间 矢 量PWM的根本任的根本任务 原 理 , 由 于务 原 理 , 由 于扇区的对称性,扇区的对称性,可 推 行 到 其 它可 推 行 到 其 它各个扇区。各个扇区。图图 期望输出电压矢期望输出电压矢量的合成量的合成期望电压空间矢量的合成期望电压空间矢量的合成 在一个开关周期在一个开关周期 中,中, 的作用时间为的作用时间为 , 的作用时间为的作用时间为 ,按矢量合成法那么可,按矢量合成法那么可得得juuUTtjUTtUTteUTtUTtTtTtssdddjddssincos3sin3c
25、os02020130201202101uuu0T1u1t2u2t电压空间矢量的作用时间电压空间矢量的作用时间 令实部与虚部分别相等,解得令实部与虚部分别相等,解得)sin31(cosu0s1dUTtsin3u23sinsinUu0sd0s2dUTTt输出电压矢量最大幅值输出电压矢量最大幅值 两个根本矢量作用时间之和应满足两个根本矢量作用时间之和应满足1)6cos(3u2)sin31(cosuss021ddUUTttn输出电压矢量最大幅值为输出电压矢量最大幅值为 23usmaxdUtjstjmjmjmmeueUetUetUtU1123)34cos()32cos()cos(2111COBOAOsu
26、uuu输出电压矢量幅值与相电压的关系输出电压矢量幅值与直流侧电压关系相电压与直流侧电压关系Ususmax3Um/211; Thita_in_sector=Thita%Degree60; Sin_value1=SinTableThita_in_sector; Int_Tmep_value1=Degree60-Thita_in_sector; Sin_value2=SinTableInt_Tmep_value1; if(MD4096) MD=4096; Tm=(long)MD*(long)Sin_value1 15; Tl=(long)MD*(long)Sin_value2 15; Tm=(lon
27、g)T12_PR*(long)Tm 12; Tl=(long)T12_PR*(long)Tl 12; switch (Sector) case 0: TA=T12_PR-Tl-Tm 1; TB=TA+Tl; TC=TB+Tm; break; case 1: TB=T12_PR-Tl-Tm 1; TA=TB+Tm; TC=TA+Tl; break; case 2: TB=T12_PR-Tl-Tm 1; TC=TB+Tl; TA=TC+Tm; break;case 3: TC=T12_PR-Tl-Tm 1; TB=TC+Tm; TA=TB+Tl; break; case 4: TC=T12_PR-
28、Tl-Tm 1; TA=TC+Tl; TB=TA+Tm; break; case 5: TA=T12_PR-Tl-Tm 1; TC=TA+Tm; TB=TC+Tl; break; if(TAT12_PR) TA=T12_PR; CCU6_CC60SR =TA; CCU6_CC61SR =TB; CCU6_CC62SR =TC; CCU6_vEnableShadowTransfer_CCU6_TIMER_12(); 。由于CPU时钟频率为40MHZ,定时器时钟为20MHZ,且采用延续增减计数方式,因此实践写入T12周期存放器CCU6_T12PR的值TC为:19991102001020211216
29、6sCPUTfTCLsMs0sLMTMTsin(3)TMTsinTTTT2M=3sdUEUin=380Ed=465 SVPWM的频率普通多少? 如何测出马鞍波形?ffMfMffTfPRTSdSSSCPUSCPU200000)100(2100402402211内部2倍频TsTs=2*T1PR/fcpu(R0+R1)为10-100K,开关频率80K,滤波电容为nF数量级?本节提要本节提要坐标变换的根本思绪坐标变换的根本思绪三相异步电动机在两相坐标系上的数三相异步电动机在两相坐标系上的数学模型学模型矢量控制系统的根本思绪矢量控制系统的根本思绪异步电机坐标变换 直流电机的物理模型 直流电机的数学模型比
30、较简单,先分析一下直流电机的磁链关系。以下图中绘出了二极直流电机的物理模型,图中 F为励磁绕组,A 为电枢绕组,C 为补偿绕组。 F 和 C 都在定子上,只需 A 是在转子上。 把 F 的轴线称作直轴或 d 轴direct axis,主磁通的方向就是沿着 d 轴的;A和C的轴线那么称为交轴或q 轴quadrature axis。一、 坐标变换的根本思绪图 二极直流电机的物理模型dqFACifiaic励磁绕组电枢绕组补偿绕组 主极磁场在空间固定不动;由于换向器作用,电枢磁动势的轴线一直被电刷限定在 q 轴位置上。 虽然电枢本身是旋转的,但其绕组经过换向器电刷接到端接板上,电刷将闭合的电枢绕组分成
31、两条支路。当一条支路中的导线经过正电刷归入另一条支路中时,在负电刷下又有一根导线补回来。 分析结果 电枢磁动势的作用可以用补偿绕组磁动势抵消,或者由于其作用方向与 d 轴垂直而对主磁通影响甚微,所以直流电机的主磁通根本上独一地由励磁绕组的励磁电流决议,这是直流电机的数学模型及其控制系统比较简单的根本缘由。 交流电机的物理模型 假设能将交流电机的物理模型等效地变换成类似直流电机的方式,分析和控制就可以大大简化。坐标变换正是按照这条思绪进展的。 在这里,不同电机模型彼此等效的原那么是:在不同坐标下所产生的磁动势完全一致。 众所周知,交流电机三相对称的静止绕组 A 、B 、C ,通以三相平衡的正弦电
32、流时,所产生的合成磁动势是旋转磁动势F,它在空间呈正弦分布,以同步转速 s 即电流的角频率顺着 A-B-C 的相序旋转。这样的物理模型绘于以下图中。 1交流电机绕组的等效物理模型ABCABCiAiBiCFs图 三相交流绕组 旋转磁动势的产生 然而,旋转磁动势并不一定非要三相不可,除单相以外,二相、三相、四相、 等恣意对称的多相绕组,通以平衡的多相电流,都能产生旋转磁动势,当然以两相最为简单。 2等效的两相交流电机绕组Fiis图5-2b 两相交流绕组 上图中绘出了两相静止绕组 和 ,它们在空间互差90,通以时间上互差90的两相平衡交流电流,也产生旋转磁动势 F 。 当图a和b的两个旋转磁动势大小
33、和转速都相等时,即以为两相绕组与三相绕组等效。 3旋转的直流绕组与等效直流电机模型sFdqidiqdq图 旋转的直流绕组 再看图中的两个匝数相等且相互垂直的绕组 d 和 q,其中分别通以直流电流 id 和iq,产生合成磁动势 F ,其位置相对于绕组来说是固定的。 假设让包含两个绕组在内的整个铁心以同步转速旋转,那么磁动势 F 自然也随之旋转起来,成为旋转磁动势。 把这个旋转磁动势的大小和转速也控制成与图 a 和图 b 中的磁动势一样,那么这套旋转的直流绕组也就和前面两套固定的交流绕组都等效了。当察看者也站到铁心上和绕组一同旋转时,在他看来,d 和 q 是两个通以直流而相互垂直的静止绕组。 假设
34、控制磁通的位置在 d 轴上,就和直流电机物理模型没有本质上的区别了。这时,绕组d相当于励磁绕组,q 相当于伪静止的电枢绕组。 等效的概念 由此可见,以产生同样的旋转磁动势为准那么,三相交流绕组、两相交流绕组和整体旋转的直流绕组彼此等效。或者说,在三相坐标系下的 iA、iB 、iC,在两相坐标系下的 i、i 和在旋转两相坐标系下的直流 id、iq 是等效的,它们能产生一样的旋转磁动势。 有意思的是:d、q 两个绕组而言,当察看者站在地面看上去,它们是与三相交流绕组等效的旋转直流绕组;假设跳到旋转着的铁心上看,它们就的确实确是一个直流电机模型了。这样,经过坐标系的变换,可以找到与交流三相绕组等效的
35、直流电机模型。 如今的问题是,如何求出iA、iB 、iC 与 i、i 和 id、iq 之间准确的等效关系,这就是坐标变换的义务。 2. 三相-两相变换3/2变换 如今先思索上述的第一种坐标变换在三相静止绕组A、B、C和两相静止绕组、 之间的变换,或称三相静止坐标系和两相静止坐标系间的变换,简称 3/2 变换。 图5-3中绘出了 A、B、C 和 、 两个坐标系,为方便起见,取 A 轴和 轴重合。设三相绕组每相有效匝数为N3,两相绕组每相有效匝数为N2,各相磁动势为有效匝数与电流的乘积,其空间矢量均位于有关相的坐标轴上。由于交流磁动势的大小随时间在变化着,图中磁动势矢量的长度是随意的。CAN2iN
36、3iAN3iCN3iBN2i60o60oB图5-3 三相和两相坐标系与绕组磁动势的空间矢量 设磁动势波形是正弦分布的,当三相总磁动势与二相总磁动势相等时,两套绕组瞬时磁动势在 、 轴上的投影都应相等, )2121(60cos60cosCBA3C3B3A32iiiNiNiNiNiN)(2360sin60sinCB3C3B32iiNiNiNiN写成矩阵方式,得CBA232323021211iiiNNii5-1 思索变换前后总功率不变,在此前提下,可以证明见p96,匝数比应为3223NN5-2 代入式5-1,得CBA232302121132iiiii5-3 令 C3/2 表示从三相坐标系变换到两相坐
37、标系的变换矩阵,那么 2323021211322/3C5-4 5-5 三相两相坐标系的变换矩阵2/3102133221322C 假设三相绕组是Y形结合不带零线,那么有 iA + iB + iC = 0,或 iC = iA iB 。代入式5-4和5-5并整理后得BA221023iiii5-6 BA2161032iiii5-7 按照所采用的条件,电流变换阵也就是电压变换阵,同时还可证明,它们也是磁链的变换阵。3. 两相两相旋转变换2s/2r变换 从等效的交流电机绕组和直流电机绕组物理模型和从两相静止坐标系到两相旋转坐标系 d、q 变换称作两相两相旋转变换,简称 2s/2r 变换,其中 s 表示静止
38、,r 表示旋转。 把两个坐标系画在一同,即得图5-4。iqsiniFssidcosididsiniqcosiiqdq图5-4 两相静止和旋转坐标系与磁动势电流空间矢量 图5-4中,两相交流电流 i、i 和两个直流电流 id、iq 产生同样的以同步转速s旋转的合成磁动势 Fs 。由于各绕组匝数都相等,可以消去磁动势中的匝数,直接用电流表示,例如 Fs 可以直接标成 is 。但必需留意,这里的电流都是空间矢量,而不是时间相量。 d,q 轴和矢量 Fs is 都以转速 s 旋转,分量 id、iq 的长短不变,相当于d,q绕组的直流磁动势。 但 、 轴是静止的, 轴与 d 轴的夹角 随时间而变化,因此
39、 is 在 、 轴上的分量的长短也随时间变化,相当于绕组交流磁动势的瞬时值。由图5-4可见, i、 i 和 id、iq 之间存在以下关系 dqcossiniiidqsincosiii 2s/2r变换公式写成矩阵方式,得 dd2r/2sqqcossinsincosiiiCiii 5-8 cossinsincoss2/ r2C5-9 是两相旋转坐标系变换到两相静止坐标系的变换阵。 式中 两相旋转两相静止坐标系的变换矩阵 对式5-8两边都左乘以变换阵的逆矩阵,即得 1dqcossincossinsincossincosiiiiii (5-10) cossinsincosr2/ s2C (5-11)
40、那么两相静止坐标系变换到两相旋转坐标系的变换阵是 电压和磁链的旋转变换阵也与电流磁动势旋转变换阵一样。 两相静止两相旋转坐标系的变换矩阵is (Fs)ssidiqdq 令矢量 is 和d轴的夹角为 s ,知 id、iq ,求 is 和 s ,就是直角坐标/极坐标变换,简称K/P变换图5-5。4. 直角坐标/极坐标变换K/P变换 图5-5 K/P变换空间矢量显然,其变换式应为 5-1222sdqiiiqsdarctanii5-13 当 s 在 0 90之间变化时,tans 的变化范围是 0 ,这个变化幅度太大,很难在实践变换器中实现,因此常改用以下方式来表示 s 值sssqsssssssdsin
41、sin(2cos)sin222tan21 coscoscos(2cos)222iii qssd2arctaniii5-14 式5-14可用来替代式5-13,作为 s 的变换式。 这样二、三相异步电动机在两相坐标系上的二、三相异步电动机在两相坐标系上的 数学模型数学模型 前已指出,异步电机的数学模型比较复杂,坐标变换的目的就是要简化数学模型。异步电机数学模型是建立在三相静止的ABC坐标系上的,假设把它变换到两相坐标系上,由于两相坐标轴相互垂直,两相绕组之间没有磁的耦合,仅此一点,就会使数学模型简单了许多。 异步电机在两相恣意旋转坐标系dq坐 标系上的数学模型 两相坐标系可以是静止的,也可以是旋转
42、的,其中以恣意转速旋转的坐标系为最普通的情况,有了这种情况下的数学模型,要求出某一详细两相坐标系上的模型就比较容易了。 变换关系 设两相坐标 d 轴与三相坐标 A 轴的夹角为 s , 而 ps = dqs 为 d q 坐标系相对于定子的角转速,dqr 为 dq 坐标系相对于转子的角转速。ABCFsdqssdq图5-6 恣意两相坐标变换空间矢量 要把三相静止坐标系上的电压方程、磁链方程和转矩方程都变换到两相旋转坐标系上来,可以先利用 3/2 变换将方程式中定子和转子的电压、电流、磁链和转矩都变换到两相静止坐标系 、 上,然后再用旋转变换阵 C2s/2r 将这些变量变换到两相旋转坐标系 dq 上。
43、 变换过程ABC坐标系 坐标系dq坐标系3/2变换C2s/2rp 矢量控制思想的引入 异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统,经过坐标变换,可以使之降阶并化简,但并没有改动其非线性、多变量的本质。需求高动态性能的异步电机调速系统必需在其动态模型的根底上进展分析和设计,但要完成这一义务并非易事。经过多年的潜心研讨和实际,有几种控制方案曾经获得了胜利的运用,目前运用最广的就是按转子磁链定向的矢量控制系统。 直流电机 交流电机 表达式一 表达式二afaMIIICTrrmMICTcosrrMICT图5-7 异步电机矢量图三、三、 矢量控制系统的根本思绪矢量控制系统的根本思绪 在坐
44、标变换章节中曾经阐明,以产生同样的旋转磁动势为准那么,在三相坐标系上的定子交流电流 iA、 iB 、iC ,经过三相/两相变换可以等效成两相静止坐标系上的交流电流 i、i ,再经过同步旋转变换,可以等效成同步旋转坐标系上的直流电流 id 和 iq 。 假设察看者站到铁心上与坐标系一同旋转,他所看到的便是一台直流电机,可以控制使交流电机的转子总磁通 r 就是等效直流电机的磁通,假设把d轴定位于 的方向上,称作MMagnetization轴,把q轴称作TTorque轴,那么M绕组相当于直流电机的励磁绕组,im 相当于励磁电流,T 绕组相当于伪静止的电枢绕组,it 相当于与转矩成正比的电枢电流。 r
45、 把上述等效关系用构造图的方式画出来,便得到图5-8。从整体上看,输入为A,B,C三相电压,输出为转速 ,是一台异步电机。从内部看,经过3/2变换和同步旋转变换,变成一台由 im 和 it 输入,由 输出的直流电机。图5-8 异步电动机的坐标变换构造图3/2三相/两相变换; VR同步旋转变换; M轴与轴A轴的夹角 3/2VR等效直流等效直流电机模型电机模型ABC iAiBiCitimii异步电动机异步电动机 异步电机的坐标变换构造图 既然异步电机经过坐标变换可以等效成直流电机,那么,模拟直流电机的控制战略,得到直流电机的控制量,经过相应的坐标反变换,就可以控制异步电机了。 由于进展坐标变换的是
46、电流代表磁动势的空间矢量,所以这样经过坐标变换实现的控制系统就叫作矢量控制系统Vector Control System,控制系统的原理构造如以下图所示。 矢量控制系统原理构造图 控制器控制器VR-12/3电流控制电流控制变频器变频器3/2VR等效直流等效直流电机模型电机模型+i*mi*t si*i*i*Ai*Bi*CiAiBiCiiimit反响信号异步电动机给定信号 图5-9 矢量控制系统原理构造图 在设计矢量控制系统时,可以以为,在控制器后面引入的反旋转变换器VR-1与电机内部的旋转变换环节VR抵消,2/3变换器与电机内部的3/2变换环节抵消,假设再忽略变频器中能够产生的滞后,那么图5-9
47、中虚线框内的部分可以完全删去,剩下的就是直流调速系统了。 设计控制器时省略后的部分控制器控制器VR-12/3电流控制电流控制变频器变频器3/2VR等效直流等效直流电机模型电机模型+i*mi*t si*i*i*Ai*Bi*CiAiBiCiiimit反响信号异步电动机给定信号 图5-10 简化控制构造图 可以想象,这样的矢量控制交流变压变频调速系统在静、动态性能上完全可以与直流调速系统相媲美。 异步电机坐标变换终了,前往 按转子磁链定向的矢量控制方程及其解耦作用 转子磁链模型 转速、磁链闭环控制的矢量控制系统直接矢量控制系统异步电动机的矢量控制系统 按转子磁链定向的矢量控制方程及其解耦作用静止两相
48、坐标系中的数学模型静止两相坐标系中的数学模型 异步电动机定子绕组是静止的,只需进展异步电动机定子绕组是静止的,只需进展3/2变换就行了,而转子绕组是旋转的,必变换就行了,而转子绕组是旋转的,必需经过需经过3/2变换和两相旋转坐标系到两相静变换和两相旋转坐标系到两相静止坐标系的旋转变换,才干变换到静止两止坐标系的旋转变换,才干变换到静止两相坐标系。相坐标系。3/2变换变换 对静止的定子三相对静止的定子三相绕组和旋转的转子绕组和旋转的转子三相绕组进展一样三相绕组进展一样的的3/2变换,变换变换,变换后的定子后的定子坐标系坐标系静止,而转子静止,而转子坐标系那么以坐标系那么以 的的角速度逆时针旋转。
49、角速度逆时针旋转。iiuuiiuu图图 定子定子及转子及转子坐标系坐标系 转子旋转坐标变换转子旋转坐标变换 对图所示的转子坐标系对图所示的转子坐标系作旋转变换,作旋转变换,将将坐标系顺时针旋转坐标系顺时针旋转角,使其与定角,使其与定子子坐标系重合,且坚持静止。坐标系重合,且坚持静止。 将旋转的转子坐标系将旋转的转子坐标系变换为静止坐标变换为静止坐标系系,意味着用静止的两相绕组等效替,意味着用静止的两相绕组等效替代原先转动的转子两相绕组。代原先转动的转子两相绕组。转子旋转坐标变换阵转子旋转坐标变换阵cossinsincos)(2/2srC变换后的电压方程变换后的电压方程rrrrrrssrrssr
50、rssrrss00dtdiiiiR0000R0000R0000Ruuuu变换后的磁链方程变换后的磁链方程rrssrmrmmsmsrrssiiiiLLLLLLL00000000L变换后的转矩方程变换后的转矩方程)(rsrsmpeiiiiLnT 旋转变换改动了定、转子绕组间的耦合关旋转变换改动了定、转子绕组间的耦合关系,将相对运动的定、转子绕组用相对静系,将相对运动的定、转子绕组用相对静止的等效绕组来替代,从而消除了定、转止的等效绕组来替代,从而消除了定、转子绕组间夹角子绕组间夹角对磁链和转矩的影响。对磁链和转矩的影响。转子旋转变换的优点转子旋转变换的优点 旋转变换的优点在于将非线性变参数的旋转变
51、换的优点在于将非线性变参数的磁链方程转化为线性定常的方程,但却磁链方程转化为线性定常的方程,但却加剧了电压方程中的非线性耦合程度。加剧了电压方程中的非线性耦合程度。将矛盾从磁链方程转移到电压方程中来将矛盾从磁链方程转移到电压方程中来了,并没有改动对象的非线性耦合性质。了,并没有改动对象的非线性耦合性质。恣意旋转坐标系中的数学模型恣意旋转坐标系中的数学模型 更广义的坐标旋转变换是对定子坐标系更广义的坐标旋转变换是对定子坐标系和转子坐标系和转子坐标系同时施行旋同时施行旋转变换,把它们变换到同一个旋转坐标系转变换,把它们变换到同一个旋转坐标系dq上。上。iiuuiiuuqd1图图 定子坐标系定子坐标
52、系和转子坐标系和转子坐标系变换到旋转坐标系变换到旋转坐标系dq旋转变换阵旋转变换阵 定子旋转变换阵为定子旋转变换阵为 转子旋转变换阵为转子旋转变换阵为cossinsincos)(2/2rsC)cos()sin()sin()cos()(2/2rrC恣意旋转变换恣意旋转变换 恣意旋转变换是用旋转的绕组替代原来静恣意旋转变换是用旋转的绕组替代原来静止的定子绕组,并使等效的转子绕组与等止的定子绕组,并使等效的转子绕组与等效的定子绕组重合,且坚持严厉同步,等效的定子绕组重合,且坚持严厉同步,等效后定、转子绕组间不存在相对运动。效后定、转子绕组间不存在相对运动。变换后的电压方程变换后的电压方程rdrqsd
53、sqrqrdsqsdrqrdsqsdrrssrqrdsqsddtdiiiiRRRRuuuu)()(0000000000001111变换后的磁链方程变换后的磁链方程rqrdsqsdrmrmmsmsrqrdsqsdiiiiLLLLLLLL00000000变换后的转矩方程变换后的转矩方程)iii(iLnTrqsdrdsqmpe恣意旋转变换恣意旋转变换 恣意旋转变换坚持定、转子等效绕组的相恣意旋转变换坚持定、转子等效绕组的相对静止,电压方程中旋转电势的非线性耦对静止,电压方程中旋转电势的非线性耦协作用更为严重,这是由于不仅对转子绕协作用更为严重,这是由于不仅对转子绕组进展了旋转变换,对定子绕组也施行了
54、组进展了旋转变换,对定子绕组也施行了相应的旋转变换。相应的旋转变换。恣意旋转变换恣意旋转变换 从外表上看来,恣意旋转坐标系从外表上看来,恣意旋转坐标系(dq)中的中的数学模型还不如静止两相坐标系数学模型还不如静止两相坐标系()中的中的简单,实践上恣意旋转坐标系的优点在于简单,实践上恣意旋转坐标系的优点在于添加了一个输入量,提高了系统控制的自添加了一个输入量,提高了系统控制的自在度,磁场定向控制就是经过选择而实现在度,磁场定向控制就是经过选择而实现的。的。 完全恣意的旋转坐标系无实践使意图义,完全恣意的旋转坐标系无实践使意图义,常用的是同步旋转坐标系,将绕组中的交常用的是同步旋转坐标系,将绕组中
55、的交流量变为直流量,以便模拟直流电动机进流量变为直流量,以便模拟直流电动机进展控制。展控制。异步电动机在两相坐标系上的形异步电动机在两相坐标系上的形状方程状方程 以上讨论了用矩阵方程表示的异步电动机以上讨论了用矩阵方程表示的异步电动机动态数学模型,其中既有微分方程电压动态数学模型,其中既有微分方程电压方程与运动方程,又有代数方程磁链方程与运动方程,又有代数方程磁链方程和转矩方程,本节讨论用形状方程方程和转矩方程,本节讨论用形状方程描画的动态数学模型。描画的动态数学模型。形状变量的选取形状变量的选取 可选的形状变量变量分为可选的形状变量变量分为5组:转速;组:转速;定子电流;转子电流;定子磁链;
56、定子电流;转子电流;定子磁链;转子磁链。转子磁链。 转速作为输出必需选取,其他的转速作为输出必需选取,其他的4组变量组变量可以恣意选取两组,定子电流可以直接检可以恣意选取两组,定子电流可以直接检测,应中选为形状变量,剩下的测,应中选为形状变量,剩下的3组均不组均不可直接检测或检测非常困难,思索到磁链可直接检测或检测非常困难,思索到磁链对电机的运转很重要,可以在定子磁链和对电机的运转很重要,可以在定子磁链和转子磁链中任选转子磁链中任选1组。组。 为形状变量的形状方程为形状变量的形状方程 dq坐标系上的转矩公式坐标系上的转矩公式 rsi)()(rqsdrdsqrmpsqsdmrqsdsqsdmrd
57、sqrmpeiiLLniiLiiiLiLLnT 为形状变量的形状方程为形状变量的形状方程 dq坐标系上形状方程坐标系上形状方程rsissqsdsqrsmrrsrdrsmrqrrsmsqssdsqsdrsmrrsrqrsmrdrrsmsdsqrmrdrqrrqsdrmrqrdrrdLprqsdrdsqrmpLuiiLLLRLRLLLTLLLdtdiLuiiLLLRLRLLLTLLLdtdiiTLTdtdiTLTdtdTJniiJLLndtd12221222112)(1)(1)( 为形状变量的形状方程为形状变量的形状方程 dq坐标系上形状变量坐标系上形状变量 rsi dq坐标系上输入变量坐标系上输
58、入变量TLsqsdTuu1UTsqsdrqrdiiX 为形状变量的形状方程为形状变量的形状方程 ,恣意旋转坐标退化为静止两相坐标,恣意旋转坐标退化为静止两相坐标系系 ,静止两相坐标系,静止两相坐标系中形状方程中形状方程 rsisssrsmrrsrrsmrrrsmssssrsmrrsrrsmrrrsmssrmrrrrsrmrrrrLprsrsrmpLuiLLLRLRLLLTLLLdtdiLuiLLLRLRLLLTLLLdtdiiTLTdtdiTLTdtdTJniiJLLndtd222222211)(01 为形状变量的形状方程为形状变量的形状方程 坐标系上形状变量坐标系上形状变量 rsi 坐标系上
59、输入变量坐标系上输入变量TssrriiXTLssTuuU 为形状变量的形状方程为形状变量的形状方程 dq坐标系上形状方程坐标系上形状方程ssissqsdsqrssrrssdssqrssqssdsqsdrssrrssqssdrssdsqsdsqssqsdsqsdssdLpsqsdsdsqpLuiiLLLRLRLTLdtdiLuiiLLLRLRLTLdtdiuiRdtduiRdtdTJniiJndtd)(11)(11)(11112磁链变了 为形状变量的形状方程为形状变量的形状方程 dq坐标系上形状变量坐标系上形状变量 dq坐标系上输入变量坐标系上输入变量TLsqsdTuu1UTsqsdsqsdii
60、Xssi 为形状变量的形状方程为形状变量的形状方程 ,恣意旋转坐标退化为静止两相坐标系,恣意旋转坐标退化为静止两相坐标系 ,静止两相坐标系静止两相坐标系中形状方程中形状方程 01ssissssrssrrssssrssssssrssrrssssrssssssssssLpsssspLuiiLLLRLRLTLdtdiLuiiLLLRLRLTLdtdiuiRdtduiRdtdTJniiJndtd1111)(2异步电动机按转子磁链定向的矢异步电动机按转子磁链定向的矢量控制系统量控制系统 经过坐标变换和按转子磁链定向,可以得经过坐标变换和按转子磁链定向,可以得到等效的直流电动机模型,在按转子磁链到等效的直
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 浙大宁波理工学院《装配式建筑》2023-2024学年第二学期期末试卷
- 宁夏卫生健康职业技术学院《边坡与基坑工程》2023-2024学年第二学期期末试卷
- 新版汽车维修工考试技巧试题及答案
- 咸阳职业技术学院《界面交互设计》2023-2024学年第二学期期末试卷
- 整形外科主治医师:男性外生殖器畸形、泌尿外科学真题一
- 硬件基础知识考题及答案
- 河北地质大学华信学院《工程编程语言》2023-2024学年第二学期期末试卷
- 2025年济南历程区九年级中考语文一模考试试题(含答案)
- 学校风险管控责任清单校园安全风险管控工作实施方案
- 异形斜拉桥施工方案
- 新版中国食物成分表
- 无人机应用与基础操控入门课件
- 完整版:美制螺纹尺寸对照表(牙数、牙高、螺距、小径、中径外径、钻孔)
- 债权法学习通超星期末考试答案章节答案2024年
- 安全生产标准化基本规范评分表
- 《Linux网络操作系统实用教程(CentOS8)第2版》全套教学课件
- 2015年919公务员联考《申论》政法干警河北卷及参考答案
- 幼儿园中班语言散文欣赏《芽》课件
- 汽轮发电机组轴系扭振在线监测、分析与保护系统研究
- 期中测试卷(1-4单元)(试题)-2023-2024学年六年级下册数学苏教版
- 医务人员不良执业行为记分管理制度
评论
0/150
提交评论