



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
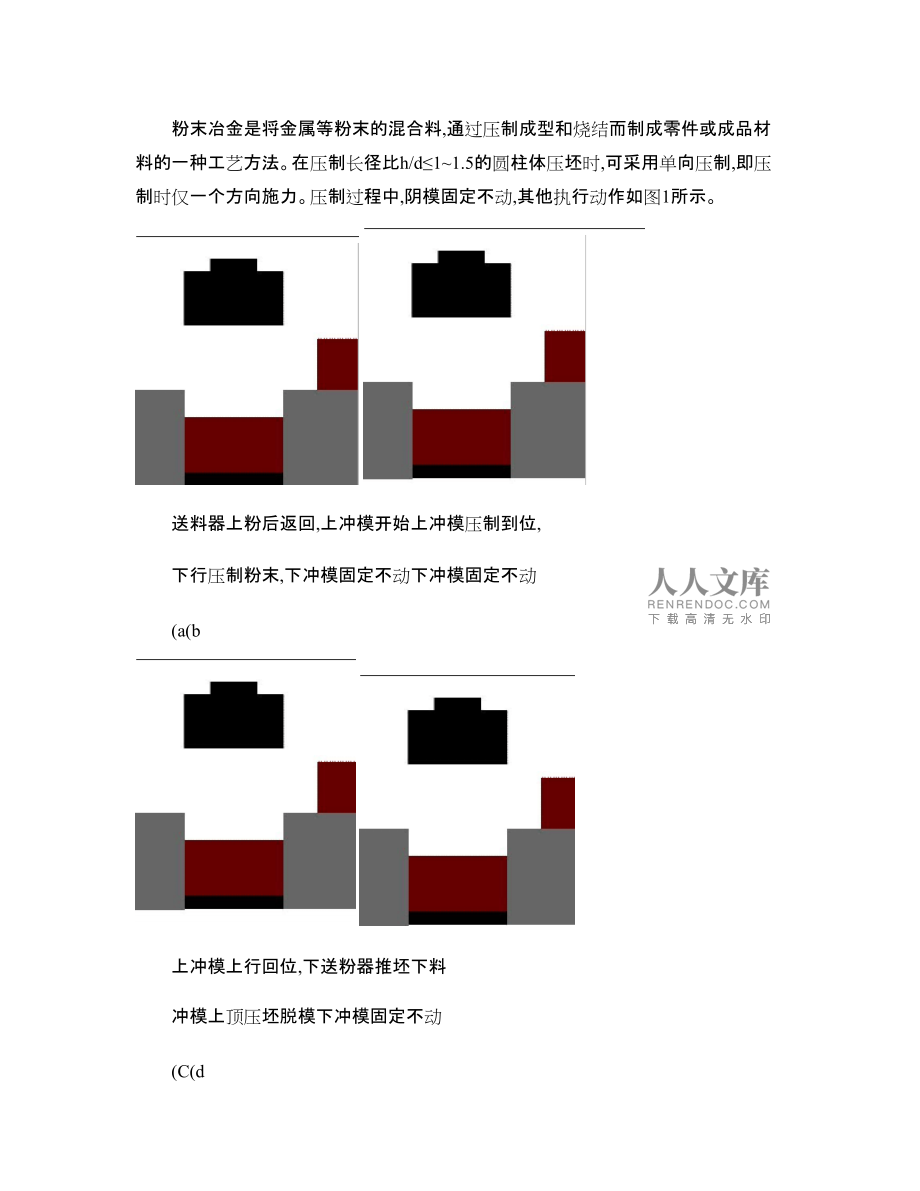
1、目录一、课题- 02二、机构总体设计- 03三、机构具体设计3.1上冲模机构设计- 043.2脱模机构设计- 213.3送粉机构设计- 46四、机构动力设计- 80五、参考文献- 82课题:粉末成形压机一.工作原理及工艺动作过程粉末冶金是将金属等粉末的混合料,通过压制成型和烧结而制成零件或成品材料的一种工艺方法。在压制长径比h/d11.5的圆柱体压坯时,可采用单向压制,即压制时仅一个方向施力。压制过程中,阴模固定不动,其他执行动作如图1所示。 送料器上粉后返回,上冲模开始上冲模压制到位,下行压制粉末,下冲模固定不动下冲模固定不动(a(b 上冲模上行回位,下送粉器推坯下料冲模上顶压坯脱模下冲模固
2、定不动(C(d 送粉器到位后上料准备回位下冲模下行回位,准备循环(e二.设计要求1.上冲模压制机构应具有以下的运动特性:快速接近粉料,慢速等速压制,压制到位后停歇片刻(约0.4秒左右保压或接近压制行程终点时再放慢而几道保压作用。2.脱模机构应使下冲模顶出距离准确,复位时要求速度快而冲击小。3.送粉机构要严格遵守压制周期的运动规律。4.进一步要求:让上冲模和下冲模的行程可调。三. 主要技术要求1每分钟压制次数为1040次; 2.压坯最大直径为45mm;3.上冲模最大行程为110mm;4.送粉器行程为115mm;5.脱模最大行程为45mm;6.压制及脱模能力最大为58KN;一:机构总体设计成型压机
3、的总体设计如图一所示。该成型压机包括三个机构:上冲模机构、下冲模机构(脱模机构、送粉机构。 图 1上冲模机构由一个曲柄摇杆机构(1、2、3和一个三杆滑块机构(3、4、5并联,其功能是:曲柄1做回转运动,带动摇杆3在一定范围内摆动,并且具有急回特性。摇杆3与连杆4铰接,进而带动冲头5做直线运动。上冲模在冲压完成后停歇0.30.4S,之后有一个急回过程。脱模机构由下冲模即推杆与圆盘凸轮组成。其功能是:在凸轮停歇,上冲模做冲压动作时凸轮与推杆不接触,此时推杆由机架拖住。这样,在冲压过程中推杆上受到的压力就不会作用到凸轮上。脱模机构能使下冲模顶出距离准确。回程(复位时速度快而冲击小。送粉机构由一个滚子
4、摆杆偏心圆盘机构与一个摇杆滑块机构串联而成。其功能是:具有间歇送料和急回特性送料的同时将已压制好的坯送离工作区域二.机构具体设计(1上冲模机构设计:设计选定L CD =L BC =L4=200mm,上冲模的行程为100mm。即构件2,3,4的长度均为200mm。先对曲柄摇杆机构进行作图分析: 图 21.假定CD杆运动到竖直位置时,AB杆与BC杆恰好共线,且此时BC与水平方向的夹角为30°。BC与B”C”分别是BC杆运动的两个极限位置。进而计算出杆CD的摆动角为41.4°计算得C”CD=69.3°。则C”CB=30°+C”CD-90°=9.3&#
5、176;AB与BC共线,A铰链的位置在直线B”C”上,现假设L AB =X,则有AC=200+X。还有AB”与B”C”重合,则AC”=200-X。进而由余弦定理得:COSC”CB=(200+X2+2002-(200-X2/2x100x1.414(200+X解得X=68.78mm即曲柄1的长度约等于68.8mm。进一步计算其机位夹角 =9.97°,即其机位夹角约等于10°,从而得该机构的行程速比系数K=1.17。最后得到的上冲模机构简图如下图三。 图 32.现对进行运动分析: 图 4计算得L AD=242mm、L AE=L AB+L BC=268.8mm、AD与水平线的夹角为
6、15.77°3.现以AD为基准进行机构的运动分析:f(2,3=(L BC cos2 +L CD cos3 (L AD+L AB cos1 f2(2,3=(L CD sin3 L BC sin2 L AB sin1该方程组的雅克比矩阵为J:L BC sin2 -L CD sin3J= -L BC cos2 L CD cos3接着进行MATLAB编程,对机构的运动进行分析:位移分析:原函数:function y=rrrposi(x%script used to implement Newton-Raphson mechod for%solving nonlinear position o
7、f RRR bar group%Input parameters%x(1=theta-1%x(2=theta-2 guess value%x(3=theta-3 guess value%x(4=LAB%x(5=LBC%x(6=LCD%x(7=LAD%Output parameters%y(2=theta-2%y(3=theta-3%y(4=theta-4%theta2=x(2;theta3=x(3;%epsilon=1.0E-6;%f=x(5*cos(theta2+x(6*cos(theta3-x(7-x(4*cos(x(1; x(6*sin(theta3-x(5*sin(theta2-x(4
8、*sin(x(1;%while norm(f>epsilonJ=-x(5*sin(theta2 -x(6*sin(theta3;-x(5*cos(theta2 x(6*cos(theta3;dth=inv(J*(-1.0*f;theta2=theta2+dth(1;theta3=theta3+dth(2;f=x(5*cos(theta2+x(6*cos(theta3-x(7-x(4*cos(x(1;x(6*sin(theta3-x(5*sin(theta2-x(4*sin(x(1; norm(f;end;y(1=theta2;y(2=theta3;主程序:clcclearx1=linsp
9、ace(0,2*pi,180;x=zeros(length(x1,7;for n=1:180x(n,:=x1(:,n 40*pi/180 55*pi/180 68.8 200 200 242;endp=zeros(length(x1,2;for k=1:180y= shangchongm(x(k,:;p(k,:=y;end得到P矩阵。得到的P矩阵的第二列是3在曲柄1转过360°的过程中对应各个位置的值。得摇杆与竖直线的夹角矩阵为q=90-p(:,1'*(180/pi-15.77。输出图像: 图 5上冲模的行程方程为:X= 2x200xcosq-300输出上冲模行程随1 摆动角
10、度变化的图像: 图 6分析上冲模的行程图像可知,上冲模在一个周期内约有0.33S的停歇时间。接下来分析机构运动的加速度:f1(2,3=(L BC cos2 +L CD cos3 (L AD+L AB cos1 f2(2,3=(L CD sin3L BC sin2 L AB sin1对时间t求导数得到:-2L BC Sin2-3L CD Sin3=-1L AB Sin13L CD Cos3-2L BC Cos2=1L AB Cos1 -L BC Sin 2 -L CD Sin32 -L BC Cos 2 L CD Cos33-L AB Sin1=1L AB Cos 11=2/=rad/s再次求导
11、数得到:-2L BC Sin2-22L BC Cos2-3L CD Sin3-32L CD Cos3=-12L AB Cos 13L CD Cos3-32L CD Sin3-2L BC Cos2+22L BC Sin2=-12L AB Sin 1 -L BC Sin 2 -L CD Sin 3 2 =L CD Cos 3 -L BC Cos 2 31L AB Cos 1 2L BC Cos 2 3L CD Cos 3 12-1L AB Sin 1 -2L BC Sin 2 3L CD Sin 3 3依据速度方程和加速度方程进行MATLAB编程。速度分析:主函数:function y=scmve
12、l(x%Input parameters%x(1=theta-1%x(2=theta-2%x(3=theta-3%x(4=dtheta-1%x(5=LAB%x(6=LBC%x(7=LCD%x(8=LDA%Outout parameters%y(1=dtheta-2%y(2=dtheta-3%A=-x(6*sin(x(2 -x(7*sin(x(3;-x(6*cos(x(2 x(7*cos(x(3;B=-x(5*sin(x(1;x(5*cos(x(1*x(4;y=inv(A*B;主程序:>> x2=x1' p(:,1 p(:,2 pi*ones(180,1 68.8*ones(
13、180,1 200*ones(180,1.200*ones(180,1 242*ones(180,1;>> m=zeros(2,180;>> for k=1:180y2=scmvel(x2(k,:;m(:,k=y2;end得到的m矩阵的第二行是CD杆的角速度进一步输出CD杆角速度图像: 图7 上冲模的速度函数V=-W3x400xsin 3输出上冲模速度图像: 图 8求加速度:主函数:function y=scma(x%Input parameters%x(1=theta-1%x(2=theta-2%x(3=theta-3%x(4=dtheta-1%x(5=dtheta-
14、2%x(6=dtheta-3%x(7=LAB%x(8=LBC%x(9=LCD%x(10=LAD%Outout parameters%y(1=a2%y(2=a3%A=-x(8*sin(x(2 -x(9*sin(x(3;x(9*cos(x(3 -x(8*cos(x(2;B=-x(4*x(7*cos(x(1 x(5*x(8*cos(x(2x(6*x(9*cos(x(3;-x(4*x(7*sin(x(1 -x(5*x(8*sin(x(2x(6*x(9*sin(x(3;C=x(4;x(5;x(6;y=inv(A*B*C;主程序:>> x3=x1' p(:,1 p(:,2 pi*one
15、s(180,1 m(1,:' m(2,:' 0.0688*ones(180,1.0.200*ones(180,1 0.200*ones(180,1 0.242*ones(180,1;>> n=zeros(2,180;for k=1:180y3=scma(x3(k,:;n(:,k=y3;end得到的n矩阵的第二行是CD杆的角加速度。输出杆CD运动的角加速度图像: 图9上冲模加速度:>> A=zeros(1,180;>> for k=1:180A(k=-0.4*n(2,k*sin(p(k,2-0.4*m(2,k2*cos(p(k,2;end输出上
16、冲模加速度图像: 图10整理数据列表: (2脱模机构设计:这里运用Camtrax 软件对凸轮进行设计。由第一步对上冲模机构的设计列出三个机构协调运动的时间表: 现依据表一进行脱模机构的凸轮设计。凸轮的动作时间分布为:(周期为2S0.5s1.5s:推杆悬空(挂在机架上,保持行程S=01.6s1.9s:推杆以摆线规律(cycloidal上顶40mm,使推杆加速度过度平稳,没有冲击2.0s0.1s:推杆保持S=40mm0.2s0.4s:推杆以摆线规律(cycloidal急回,速度快,无冲击具体设计阴模及推杆尺寸设计,如图: 图 11机构为滚子对心直动推杆圆盘凸轮依据上述行程分析在Camtrax输入运
17、动信息: 图 12利用Camtrax 软件不断对凸轮进行优化设计,既要保证运动规律,使凸轮的压力角满足a=30°,又使推杆运动无冲击,并使机构尽量紧凑。最终选定凸轮基圆半径为r0=130mm,滚子半径为rr=30mm。设定凸轮运动周期为2S。运行软件,画出凸轮轮廓图: 图 13 输出推杆运动规律图像: 图 14 输出推杆运动速度图像: 图 15输出推杆运动加速度图像: 图16 输出凸轮各个位置的压力角图像: 图17分析图15和图16可知该凸轮在运动过程中加速度过度平稳,无冲击,并且压力角满足设计要求。SolidWorks建模结果如图: 图18输出该凸轮的各项数据列表: 2.机构为平底
18、推杆直动对心圆盘凸轮依据上述行程分析在Camtrax输入运动信息: 图19利用Camtrax 软件不断对凸轮进行优化设计,既要保证运动规律,使凸轮的压力角满足a=30°,又使推杆运动无冲击,并使机构尽量紧凑,凸轮轮廓不出现失真。最终选定凸轮基圆半径为r=180mm,导轨长度L=100mm。设定凸轮运动周期为2S。运行软件,画出凸轮轮廓图: 图20输出推杆运动规律图像: 图21输出推杆运动速度图像: 图22 输出推杆运动加速度图像: 图23分析图21可知该凸轮在运动过程中加速度过度平稳,无冲击。输出该凸轮各项数据。 分析比较两个形式的凸轮都能满足运动及功能要求,但是比较两者的基本尺寸发
19、现平底推杆对心直动圆盘凸轮的基圆半径要180mm才能满足功能及力学要求,但是滚子推杆对心直动圆盘凸轮在满足相同功能及力学要求是所需的最小基圆半径只要130mm。从机构尺寸,紧凑的角度考虑,脱模机构选用滚子推杆对心直动圆盘凸轮,即第一种设计方案。(3送粉机构设计: 图24该机构由摆动推杆凸轮机构与摇杆滑块机构串联而成。机构设计尺寸:摆动推杆L3=30mm、摇杆L4=200mm、连杆L5=400mm、摆杆3与机架铰接的位置和连杆与料斗铰接的位置在同一条水平线上,且铰链A 到阴模中心线的距离L=500mm。料斗的宽度d=60mm。滚子半径r r=15mm。摇杆L4与摆动推杆L3固连在一起,两杆成90
20、°夹角。由料斗的运动规律来设计连杆机构主动件的角度摆动规律,进而设计摆杆凸轮的运动规律。考虑料斗运动与上冲模机构以及脱模机构运动的协调,先设计其运动规律如下:00.4s:料斗停在阴模口的正上方,进行加粉。此时连杆AB与水平线的夹角为49.46°。此时对应的摆动推杆L3与水平线的夹角为40.54°。0.50.6s:料斗在这个时间段有一个急回动作,急回一个料斗的宽度即60mm。连杆机构运动到ABC处时,AB杆与水平线的夹角为65.28°。此时对应的摆动推杆L3与水平线的夹角为24.72°,即在这段时间内,摆动推杆的摆角从40.54°减小到24.72°,为保证运动加速度的平稳,这段时间凸轮运动规律我们设计为摆线运动规律(cycloidal。0.70.9s:料斗在这段时间内继续做回程运动,回程60mm,相比于过程这个时间段经历比较长。连杆机构运动到AB”C”处时,AB
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- Unit+2+Travelling+Around+词汇课件 高一英语人教版(2019)必修第一册
- 走进化学科学+同步练习 高一上学期化学鲁科版(2019)必修第一册
- 校园环保倡议行动主题班会
- 健康生活主题班会
- 联盟项目初始审查申请表+复审申请表+递交文件清单(医院版)
- 篝火晚会活动方案
- 定制协议书模板中译英
- 离婚协议书模板剪辑打印
- 采购竞标合作协议书模板
- 儿童乒乓球培训淘汰赛协议
- 公司授权收款委托书英文版(3篇)
- 五年级上册数学课件-5.3 除数是整数的小数除法丨苏教版 (共11张PPT)
- 病员搬运技术课件
- 一篇散文《水银花开的夜晚》弄懂散文题型
- 云教版四年级劳动教案上
- 拼音田字格(A4打印模板)
- (新教材)五四制青岛版三年级下册科学 1.土壤的成分 教学课件
- 有限空间作业安全技术交底
- 公司安全职责界定和机构设置管理办法
- 小学音乐人音一年级上册(2023年新编)第2课快乐的一天-《快乐的一天》教案
- 企业管理概论-课件全书课件完整版ppt全套教学教程最全电子教案电子讲义(最新)
评论
0/150
提交评论