



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、1 进给伺服系统是数控系统主要的子系统。如进给伺服系统是数控系统主要的子系统。如果说果说CNC装置是数控系统的装置是数控系统的“大脑大脑”,是发布,是发布“命命令令”的的“指挥所指挥所”,那么进给伺服系统则是数控系,那么进给伺服系统则是数控系统的统的“四肢四肢”,是一种,是一种“执行机构执行机构”。它忠实地执。它忠实地执行由行由CNC装置发来的运动命令,精确控制执行装置发来的运动命令,精确控制执行部件的运动方向,进给速度与位移量。部件的运动方向,进给速度与位移量。2第一节第一节 概述概述一、进给伺服系统的定义及组成一、进给伺服系统的定义及组成1. 定义定义 进给伺服系统进给伺服系统(Feed
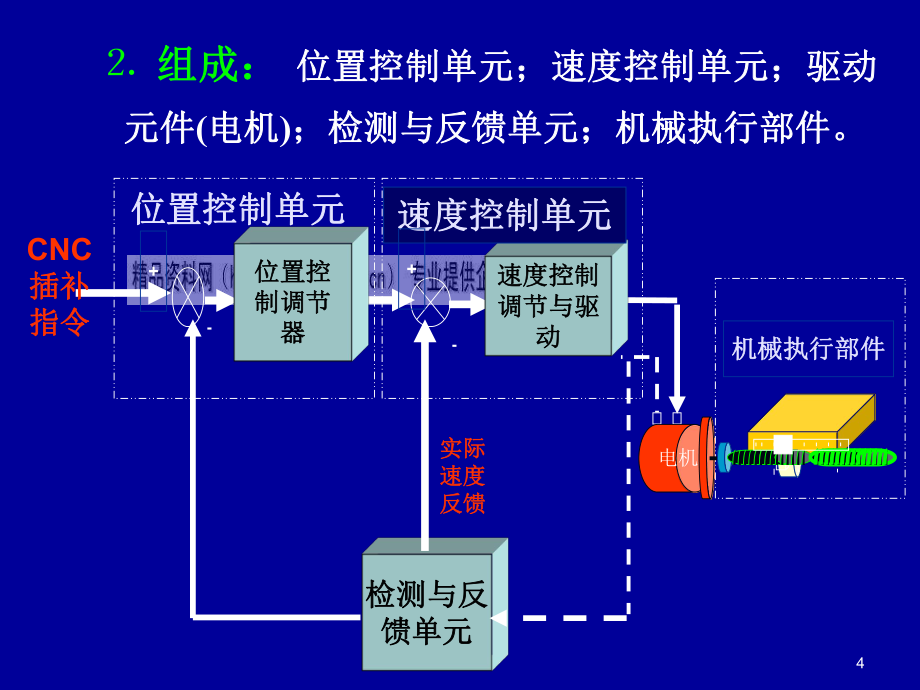
2、Servo System)以移动部件的以移动部件的位置位置和和速度速度作为控制量的作为控制量的自动控制系统。自动控制系统。3 组成:组成: 位置控制单元;速度控制单元;驱动位置控制单元;速度控制单元;驱动元件元件(电机电机);检测与反馈单元;机械执行部件。;检测与反馈单元;机械执行部件。实际实际速度速度反馈反馈位置控位置控制调节制调节器器速度控制速度控制调节与驱调节与驱动动检测与反检测与反馈单元馈单元位置控制单元位置控制单元速度控制单元速度控制单元+-机械执行部件机械执行部件CNC插补插补指令指令+-电机4二、二、NC机床对数控进给伺服系统的要求机床对数控进给伺服系统的要求1. 调速范围要宽且
3、要有良好的稳定性调速范围要宽且要有良好的稳定性 调速范围调速范围: 一般要求一般要求: 稳定性稳定性:指输出速度的波动要少,尤其是在低速时的平稳性显得特别重要。minmaxFFRNminmin.minmm1Fmm1010000RN且56 负载特性要硬负载特性要硬 当负载变化时,输出速当负载变化时,输出速度应基本不变,即度应基本不变,即F尽尽可能小;可能小; 当负载突变时,要求速当负载突变时,要求速度的恢复时间短且无振荡,度的恢复时间短且无振荡,即即t尽可能短;尽可能短; 应有足够的过载能力。应有足够的过载能力。 即,要求伺服系统有良即,要求伺服系统有良好的静态与动态刚度。好的静态与动态刚度。
4、t F t F7响应速度快且无超调响应速度快且无超调 这是对伺服系统动态这是对伺服系统动态性能的要求,即在性能的要求,即在无超调无超调的前提下,执行部件的运的前提下,执行部件的运动速度的建立时间动速度的建立时间 t p 应尽应尽可能短。可能短。 通常要求从通常要求从 0F max(F max0),其时间应小),其时间应小于于200ms,且不能有超调,且不能有超调,否则对机械部件不利,有否则对机械部件不利,有害于加工质量。害于加工质量。 t F tp8综上所述综上所述: 对伺服系统的要求包括静态静态和动态动态特性两方面; 对高精度的数控机床,对其动态性能的要求更严。5. 能可逆运行和频繁灵活启停
5、。6. 系统的可靠性高,维护使用方便,成本低。9103. 速度单元是上述驱动电机及其控制和驱动装置速度单元是上述驱动电机及其控制和驱动装置,通通常驱动电机与速度控制单元是相互配套供应的,常驱动电机与速度控制单元是相互配套供应的,其性能参数都是进行了相互匹配,这样才能获得其性能参数都是进行了相互匹配,这样才能获得高性能的系统指标。高性能的系统指标。4. 速度控制单元主要作用速度控制单元主要作用:接受来自位置控制单元的接受来自位置控制单元的速度指令信号,对其进行适当的调节运算速度指令信号,对其进行适当的调节运算(目的是目的是稳速稳速),将其变换成电机转速的控制量,将其变换成电机转速的控制量(频率,
6、电压频率,电压等等),再经功率放大部件将其变换成电机的驱动电再经功率放大部件将其变换成电机的驱动电量,使驱动电机按要求运行。量,使驱动电机按要求运行。 即,即,调节、变换、功放调节、变换、功放。115. 进给驱动系统的特点(与主运动(主进给驱动系统的特点(与主运动(主轴)系统比较):轴)系统比较):q 功率相对较小;功率相对较小;q 控制精度要求高;控制精度要求高;q 控制性能要求高,尤其是动态性能。控制性能要求高,尤其是动态性能。12二、步进电机及其驱动装置、步进电机及其驱动装置 步进电机步进电机流行于流行于70年代,该系统结构简年代,该系统结构简单、控制容易、维修方面,且控制为全数字单、控
7、制容易、维修方面,且控制为全数字化。随着计算机技术的发展,除功率驱动电化。随着计算机技术的发展,除功率驱动电路之外,其它部分均可由路之外,其它部分均可由软件实现软件实现,从而进,从而进一步简化结构。因此,这类系统目前仍有相一步简化结构。因此,这类系统目前仍有相当的市场。目前步进电机仅当的市场。目前步进电机仅用于小容量、低用于小容量、低速、精度要不高的场合,速、精度要不高的场合,如经济型数控、打如经济型数控、打印机、绘图机等计算机的外部设备。印机、绘图机等计算机的外部设备。131415步进电机是一种将电脉冲信号转化为机械角位移的电步进电机是一种将电脉冲信号转化为机械角位移的电磁机械装置。磁机械装
8、置。由于所用电源是脉冲电源,所以也称为脉冲马达。脉冲马达。 步进电机和一般电机不同,一般电机通电后连续转动,而步进电机则随输入的脉冲按节拍一步一步地转动。对步进电机施加一个电脉冲信号时,步进电机就旋转一个固定的角度,称为一步一步。每一步所转过的角度叫做步距角。步距角。 步进电机步进电机16 步进电机的角位移量和输入的脉冲数成正比。在步进电机的角位移量和输入的脉冲数成正比。在时间上与输入的脉冲同步。时间上与输入的脉冲同步。 因此,因此,只需要控制输入脉冲的只需要控制输入脉冲的数量数量、频率频率及电机及电机绕组绕组通电相序通电相序,便可以获得所需要的便可以获得所需要的转角转角、转速转速及转及转动动
9、方向方向。 在无脉冲输入时,步进电机在绕组电源激励下,在无脉冲输入时,步进电机在绕组电源激励下,气隙磁场能使转子保持原有的位置而处于定位状态。气隙磁场能使转子保持原有的位置而处于定位状态。 步进电机步进电机17 步进电机的分类步进电机的分类 按运动方式分:按运动方式分: 旋转运动、直线运动式步进电机旋转运动、直线运动式步进电机 按工作原理分:按工作原理分: 反应式(磁阻式)、电磁式、永磁式;反应式(磁阻式)、电磁式、永磁式; 按结构分:按结构分: 单段式(径向式)、多段式(轴向式)单段式(径向式)、多段式(轴向式) 按使用场合分:按使用场合分: 功率步进电机和控制步进电机;功率步进电机和控制步
10、进电机; 按相数分:按相数分: 三相、四相、五相、六相、八相等三相、四相、五相、六相、八相等 按使用频率分:按使用频率分: 高频率和低频步进电机高频率和低频步进电机 不同的步进电机,其工作原理、驱动装置也不完不同的步进电机,其工作原理、驱动装置也不完全一样。全一样。18 步进电机的工作原理步进电机的工作原理如图所示,如图所示,三相反应式步进电机工作原理图。三相反应式步进电机工作原理图。由转子和定子组成。定子上有A、B、C三对磁极绕组三对磁极绕组,分别为A相、相、B相、相、C相相。转子转子是硅钢片软磁材料迭合成的带齿廓形状的铁心。 如果在定子上的三对绕组中通直流电流,就会产生磁场。B相通电A相通
11、电C相通电19BACBCABACBCABACBCA12341234逆时针回转逆时针回转300逆时针回转逆时针回转300当当A、B、C三对磁极的绕组依次轮流通电,则三对磁极的绕组依次轮流通电,则A、B、C三对磁极依次产生磁场吸引转子转动。三对磁极依次产生磁场吸引转子转动。当当A相通电时,相通电时,B相和C相不通电,电机铁心的AA轴方向产生磁通,在磁拉力的作用下,转子1、3齿与A相磁极对齐,2、4两齿与B、C两磁极相对错开30020当当B相通电时,相通电时,C相和A相断电,电机铁心的BB轴方向产生磁通,在磁拉力的作用下,转子沿逆时针方向旋转300,2、4齿与B相磁极对齐。1、3两齿与C、A两磁极相
12、对错开300当当C相通电时,相通电时,A相和B相断电,电机铁心的CC轴方向产生磁通,在磁拉力的作用下,转子沿逆时针方向旋转300,1、3齿与C相磁极对齐。2、4两齿与A、B两磁极相对错开300 若按若按A B C。通电相序连续通电,则步进电通电相序连续通电,则步进电机就连续地沿逆时针方向转动,每换接一次相序,步机就连续地沿逆时针方向转动,每换接一次相序,步进电机沿逆时针方向转动进电机沿逆时针方向转动300,即步距角为,即步距角为300。21 若按若按A C B。进行,则转子沿顺时针方向旋进行,则转子沿顺时针方向旋转。转。上述通电方式称为上述通电方式称为三相单三拍三相单三拍通电方式。通电方式。所
13、谓所谓“单单”是指每次只有一相绕组通电的意思。是指每次只有一相绕组通电的意思。“一拍一拍”从一相通电换接到另一相通电称为一拍。从一相通电换接到另一相通电称为一拍。“三拍三拍”每一拍转子转过一个步距角,这样每一拍转子转过一个步距角,这样“三拍三拍”是指通电换接三次后完成一个通电周期。是指通电换接三次后完成一个通电周期。 三相六拍通电方式三相六拍通电方式 即按即按A AB B BC C CA相序通电。(见下图)相序通电。(见下图)22B相通电BC相通电C相通电AB相通电A相通电CA相通电工作原理:工作原理: 当当A相通电,相通电,1、3齿齿与与A相磁极对齐相磁极对齐。当。当A、B两相同时通电,因两
14、相同时通电,因A极吸引极吸引1、3齿,齿,B极吸引极吸引2、4齿,转子逆时针旋转齿,转子逆时针旋转150。随着。随着A相断电,只有相断电,只有B相通电相通电13A吸1、3两齿 A吸1、3两齿B吸2、4两齿B吸2、4两齿B吸2、4两齿C吸1、3 24C吸1、3 A吸2、4C吸1、3 23转子又逆时针转转子又逆时针转150,2、4齿与齿与B相磁极对齐相磁极对齐,如果继,如果继续按续按BC C CA A。相序通电,步进电机就相序通电,步进电机就沿着逆时针方向,以沿着逆时针方向,以150的步距角一步一步移动。的步距角一步一步移动。这种通电方式采用这种通电方式采用单、双相轮流通电单、双相轮流通电,在通电
15、换接时,在通电换接时,总有一相通电,所以工作较平稳。,总有一相通电,所以工作较平稳。实际使用的步进电机,一般都要求有较小的步实际使用的步进电机,一般都要求有较小的步距角,因为步距角越小所达到的位置精度越高距角,因为步距角越小所达到的位置精度越高。以上所述,以上所述,步进电机的步距角大小不仅与通电方式步进电机的步距角大小不仅与通电方式有关,还与转子的齿数有关。有关,还与转子的齿数有关。计算公式为:计算公式为:mzk360m定子励磁绕组相数定子励磁绕组相数Z转子齿数转子齿数K通电方式,单为通电方式,单为1,双为,双为224步进电机转速计算步进电机转速计算:360on60f=6fo式中:式中:n转速
16、(转速(r/min);f脉冲频率,即每秒输入脉冲频率,即每秒输入步进电机的脉冲数;步进电机的脉冲数; 用度数表示的步距角。用度数表示的步距角。式中,式中,当转子的步距角一定时,步进电机的转速与输当转子的步距角一定时,步进电机的转速与输入的脉冲频率成正比。入的脉冲频率成正比。25步进电机的特点:步进电机的特点:(1)步进电机的输出转角与脉冲频率严格成正比,所)步进电机的输出转角与脉冲频率严格成正比,所以控制输入步进电机的脉冲个数就能控制位移量。以控制输入步进电机的脉冲个数就能控制位移量。(2)步进电机的转速与输入的脉冲频率成正比,只要)步进电机的转速与输入的脉冲频率成正比,只要控制脉冲频率就能调
17、节步进电机的转速。控制脉冲频率就能调节步进电机的转速。(3)当停止送入脉冲时,只要维持绕组内电流不变,)当停止送入脉冲时,只要维持绕组内电流不变,电机轴可以保持在某固定位置上,不需要机械装制装电机轴可以保持在某固定位置上,不需要机械装制装置。置。(4)改变通电相序即可改变电机转向。)改变通电相序即可改变电机转向。(5)步进电机存在齿间相邻误差,但不存在累积误差)步进电机存在齿间相邻误差,但不存在累积误差26A相、B相C相、A相、B相C相、f、nCNC插补指令脉冲频率f和脉冲个数n换算脉冲环形分配变换功率放大步进电机27步进电机Z1Z2 tf, 28t360ZZi21t i360:2925Z20
18、Z2520800106750360t360ZZi2121.25Z20Z2520800106750360t360ZZi2121.步进电机Z1Z2 tf, 30minmmf60Fminmaxmm96004800Fminmaxmm960480FmaxfmaxFZH160008000fmax313233例例2 设设X-Y 工作台由步进电机直接经丝杆螺母副驱工作台由步进电机直接经丝杆螺母副驱动,丝杆螺距为动,丝杆螺距为5mm,步进电机步距角为,步进电机步距角为150,工作,工作方式三相六拍,工作台最大行程为方式三相六拍,工作台最大行程为400mm,求:,求:(1)脉冲当量;)脉冲当量;(2)微机发出的脉
19、冲总数是多少?)微机发出的脉冲总数是多少?步进电机步进电机Z1Z2 tf, 34(2)计算脉冲数计算脉冲数n,由 n =L=L( (工作台最大行程)工作台最大行程)所以,脉冲数为所以,脉冲数为: n = =L/ L/ 400/0.0208319200400/0.0208319200步步解: (1)由计算脉冲当量)由计算脉冲当量:360 L0已知, L0=5mm, =150求脉冲当量求脉冲当量 ? 5/360 5/360 1.5=0.02083(mm)35例例3 步进电机直接经丝杆螺母驱动工作台,步进电机步进电机直接经丝杆螺母驱动工作台,步进电机步距角步距角0.720,工作台质量为工作台质量为1
20、00kg,负载质量为,负载质量为50kg,切削负载为切削负载为4000N,丝杆螺距为,丝杆螺距为5mm,如果步进电机,如果步进电机从从500Hz线性加速到线性加速到2000Hz,加速时间为,加速时间为0.2S,求步,求步进电机的驱动转距?进电机的驱动转距?解解:(:(1)忽略滚珠丝扛及电机的转动惯量,则折算忽略滚珠丝扛及电机的转动惯量,则折算到电机轴上等效转动惯量:到电机轴上等效转动惯量:V=f =500=500 0.01=5mm/s360 L0=0.01mmJ=m(V)236J=m(V)2所以,=(100+50) (5/2)=95.08 10-6(kg.m)22(2)求电机轴的等效转矩:求电
21、机轴的等效转矩: T =F( )VF为切削负载为切削负载4000N;V5mm/s=4000(5/2 )=3184.7 N.mm=3.184 N.M(3)步进电动机的角加速度:步进电动机的角加速度:=d dt=dfdt=(t 0 )t2 3600.72.=2000 5000.2 2 360 0.72=94.2 rad/s237所以,步进电机的启动转矩为:步进电机的启动转矩为: T q T + J T等效转矩;等效转矩;J 空载启动时空载启动时, 产生最大加速度所需的转矩产生最大加速度所需的转矩; 步进电动机的角加速度。步进电动机的角加速度。所以, T q T + J =3.184+95.08 1
22、0-6 94.2= 3.27 Nm38例例4 一台五相步进电机,五相五拍运行时其步距角是一台五相步进电机,五相五拍运行时其步距角是1.50,此电动机转子上应有几个齿?齿距角是多少?,此电动机转子上应有几个齿?齿距角是多少?此电动机若按十拍运行,齿距角度是多少度?按五拍此电动机若按十拍运行,齿距角度是多少度?按五拍和十拍运行时,每走一步对应的电角度是多少?和十拍运行时,每走一步对应的电角度是多少?解:(解:(1)步距角:)步距角:360 mKz 0Z齿数;m相数;K1 五拍(单拍)2 十拍(双拍)39所以,五拍运行时:五拍运行时:360 mKz 0=1.5 0K=1m=5Z=360 0/5 1=
23、48齿十拍运行时:十拍运行时:360 5 2 48 0=0.75 0(2)齿距角齿距角:c=360 48 0=7.5 0齿距角的电角度齿距角的电角度:e=360 m K 0五拍运行时五拍运行时:e=360 5 1 0=72 040十拍运行时十拍运行时:e=360 5 2 =36 0 041例例5 设有一步进电机驱动的工作台,步进电机通过设有一步进电机驱动的工作台,步进电机通过减速齿轮副驱动滚珠丝杆,其参数符号如下:脉冲减速齿轮副驱动滚珠丝杆,其参数符号如下:脉冲当量当量 ,滚珠丝杆的基本导程为,滚珠丝杆的基本导程为L。步进电机的步距。步进电机的步距角为角为 ,减速齿轮比为,减速齿轮比为1:i。
24、问题:。问题:(1)试写出)试写出 、 、 L、i之间之间 的关系;的关系;(2)若)若 =0.001mm, L。=5mm;减速比为减速比为1:5,问,问选择步进电机的步距角应为多少?选择步进电机的步距角应为多少?42360 L0 i =360 5 0.001/5=0.36 0 0360 L0 0i解:(解:(1)求脉冲当量:)求脉冲当量:(2) 步进电机的步距角步进电机的步距角4344454647电磁式反应式磁滞式非电磁式交流同步伺服电机交流感应伺服电机交流伺服电机永永磁磁式式48可控硅整流器可控硅整流器逆变器逆变器整流器整流器逆变器逆变器交变频器(直接式)交电流型交变频器(间接式)直交变频器电电压压型型电压型变频器方案示意图电压型变频器方案示意图49LdUdT3T4T5T3T1T2CdUVWABC 结论:结论:变频器实现变频调压的关变频器实现变频调压的关键是逆变器控制端获得要求控制波键是逆变器控制端获得要求控制波形(如形(如SPWM波)。波)。50515253545556全数字型系统数字模拟混合型数字型系统全软件型系统半软件型系统全硬件型系统57_ NC装装 置置F/V偏差偏
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 专题01 热爱生活 热爱写作+作文选材技巧-【同步作文课】六年级语文上册单元写作深度指导(统编版2024·五四学制)
- 幼儿园小班音乐《红眼睛》课件
- 西京学院《影像设备创新设计》2023-2024学年第一学期期末试卷
- 西京学院《数控技术与编程》2021-2022学年期末试卷
- 冰淇淋素描课件
- 核心制度课件
- 管理会计实务 课件情境3、4 谋而后定:企业战略执行的有效工具、做好企业的战略参谋官
- 西华师范大学《体育科学研究方法》2023-2024学年第一学期期末试卷
- 西华师范大学《科学教育学》2022-2023学年第一学期期末试卷
- 移动机器人原理与技术 课件 第7、8章 移动机器人语音识别与控制、移动机器人的通信系统
- 磷酸二氢钾的安全技术说明书
- (高级)信息通信网络运行管理员技能鉴定考试题库(附答案)
- 垃圾渗滤液处理站运维及渗滤液处理投标方案(技术标)
- 3.3《不简单的杠杆》课件
- 弗洛伊德生平及精神分析学说的发展历程
- 普通高中语文课程标准解读课件
- 招商引资面试题
- 二次离子质谱仪(SIMS)分析技术及其在半导体产业中的应用获奖科研报告
- 32气温的变化与分布课件
- 飞机机电设备维修
- 初中物理重点名词解释
评论
0/150
提交评论