



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、静力学1. 二力平衡原理适用于。(a)(a) 刚体 (b)变形体 (c) 刚体和变形体2. 力的平行四边形合成法则适用于。(c)(a)刚体(b)变形体(c)刚体和变形体3. 加减平衡力系原理适用于。(a)(a)刚体(b)变形体(c)刚体和变形体4. 力的可传性原理适用于。(a)(a)刚体(b)变形体(c)刚体和变形体5. 作用力与反作用力原理适用于。(c)(a)刚体(b)变形体(c)刚体和变形体6. 若作用在A点的两个大小不等的力F i和F 2,沿同一直线但方向相反。则其合力可以表示为。(c)F 1一 F 2;(b) F2 F i;(c) F 什 F 27.重为G的钢锭,放在水平支承面上,钢锭
2、对水平支承面的压力为F n,水平支承面对钢锭的约束力是F n。这三个力它们的大小关系是。(a)8.9.G、F N、上面图里, G与F n 上面图里,(b)F N、 G与F n 力(b)(c) F n大于G和F nFn之中哪两力是二平衡力?G 与 F n (c) F n 与 F nFN之中哪两力是作用力与反作用力?G 与 F n (c) F n 与 F n (d)(b)(d)哪两个都不是平衡的(c)哪两个都不是作用力与反作用10.重为G的物体,用无重绳挂在天花板上(图2)。Fs为重物对绳子的拉力,Ft为绳子对(a)天花板的拉力,G为物体的重力。这三个力它们的大小关系是11.(b) 不相等F s、
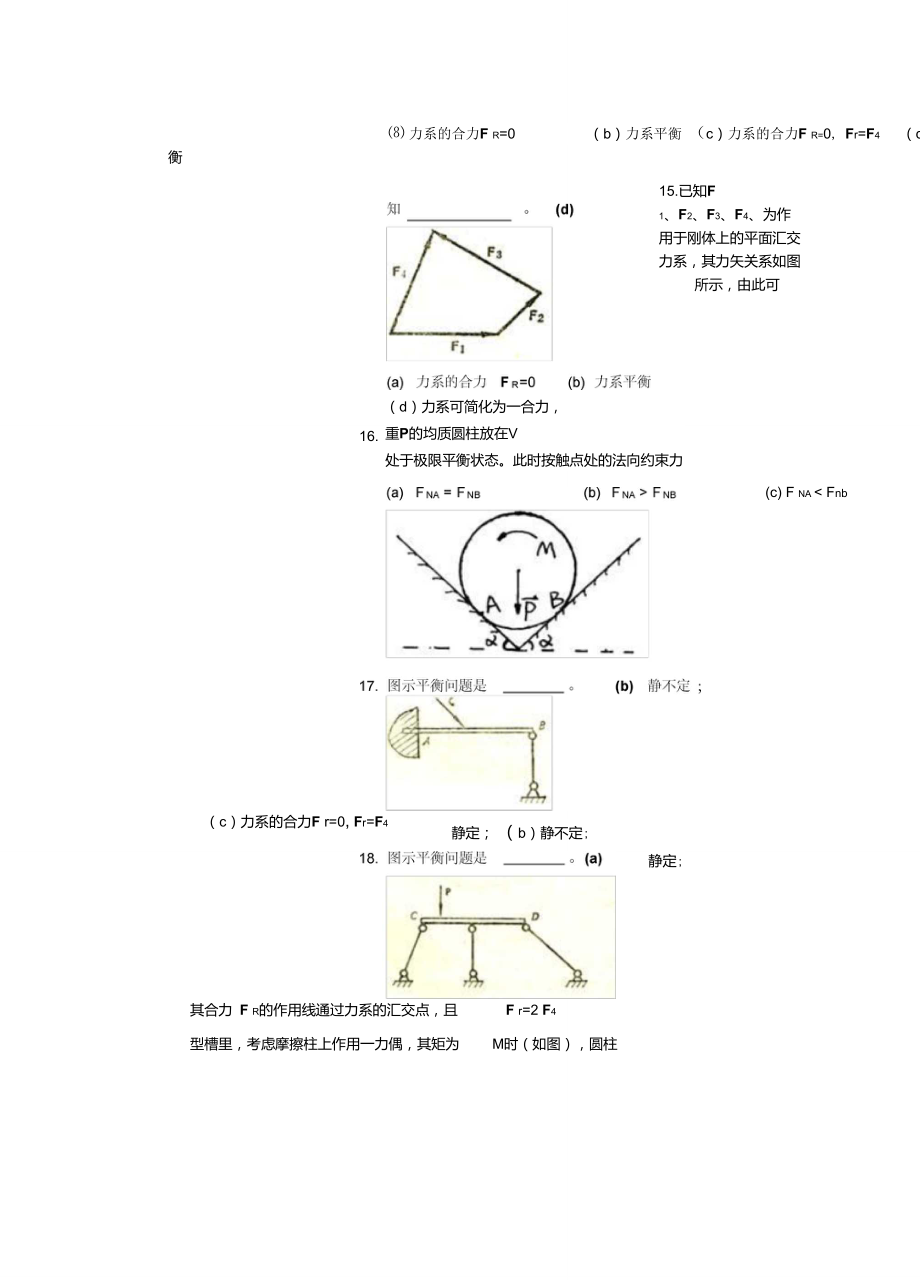
3、F t之中(c) F t大于F s和G 是作用与反作用力。(c) F s 与 F T(d)(d)哪两个都不是作用与反作用Fl(a) G 与 F t (b) G 与 F s力12.已知F 1、F2、F3、F4、为作用于刚体上的平面汇交力系,其力矢关系如图所示,由此可知。(a)(a)力系的合力Fr=0(b)力系平衡(c)力系的合力F盯0, Fr=2F2(d)力系不平衡13.已知F 1、F2、F3、F4、为作用于刚体上的平面汇交力系,其力矢关系如图所示,由此可知。(b)Fl 力系可简化为一合力,其合力F r的作用线通过力系的汇交点,且Fr=2F 2(b)力系平衡(c)力系的合力Fr=0, Fr=2F
4、2(d)力系不平衡亠16.(d)力系可简化为一合力, 重P的均质圆柱放在V 处于极限平衡状态。此时按触点处的法向约束力(c) F NA F 3三个力,并构成封闭三角形,如 图所示。此力系。(c)(a) 力系平衡 (b)力系可简化为合力(c)力系可简化为合力偶23. 某一平面平行力系各力的大小、方向和作用线的位置如图所示。此力系的简化结果与简化中心的位置 。(a)FgJV 內 hKWI.to 10100(a)无关 (b)有关24. 重量G=10 ( N)的搁置在倾角:=300的粗糙上,如图所示。物块与斜面间的静摩擦因数f=0.6,则物块处于状态。 (a)25.26.静止 (b)向下滑动(c)临界
5、下滑重量为P的物块,搁置粗糙水平面上,已知物块与水平面间的静摩擦角:m=20,当受一斜侧推力Q=P作用时,如图所示,Q与法向间的夹角=30,则物块处于状厂P态。(a)静止 (b)滑动 (c)临界平衡重量为G的物块,搁置粗糙水平面上,物块与水平面间的静摩擦因数为f,并知在水平推力P作用下,物块仍处于静止状态,如图所示,此时,水平面的全反力为。(a)F严应+审(b)(c)玉二护+丽2(d) FR=fG27.如图所示物块重 P,在水平推力F作用下处于平衡。已知物块与铅垂面间的静滑动摩擦因数为f。则物块与铅垂面间的摩擦力的大小为 。(c)28.29.(c)30.摩擦力Fs=fP(b)摩擦力Fs=fF(
6、c)摩擦力Fs=P (d)摩擦力Fs=F空间力偶矩是。(d)代数量;(b)滑动矢量;(c)定位矢量;(d)自由矢量。正立方体的顶角上作用着六个大小相等的力,此力系向任一点简化的结果主矢等于零,主矩不等于零主矢不等于零,主矩等于零一重W的物体置于倾角为.:的斜面上加物重量,则物体;若减轻物体重量,则物体(b)主矢不等于零,主矩也不等于零(d)主矢等于零,主矩也等于零,若摩擦因数为 f,且tg“. f,则物体。(a)(a)(a)。若增(a)静止不动;(b)向下滑动;(c)运动与否取决于平衡条件。运动学1. 点的运动速度用 表示。 (a)(a) 矢量 (b) 标量(c) 绝对值(b)2. 点的加速度
7、可由速度对时间求导数求得,其表达式为:dvtdva -a - a 二一(a)(b)7-i(c)3. 点的加速度在副法线轴上的投影 。(b)可能为零 (b) 定为零(c)一定不为零点作圆周运动,如果知道法向加速度越变越大,点运动的速度。(a)(a)越变越大(b)越变越小(c)越变越大还是越变越小不能确定点作直线运动,某瞬时速度vx= 2(m/s),某瞬时加速度ax=- 2(m/s2),则一秒钟以后点的 速度(c)等于零(b)等于2(m/s)(c) 不能确定点作曲线运动时, 出现速度和加速度同时等于零的瞬时。(a)有可能 (b)没有可能点作加速直线运动,速度从零开始越变越大,如果测量出开始运动后几
8、秒钟内经过的路 程,计算出加速度的大小。(b) 一定能 (b) 也不能点作直线运动,运动方程x=12t-t3, x的单位是(cm), t的单位是(s)当t = 3 (s)时,x= 9 ( cm),可以计算出点在3秒钟内经过的路程为(c) 9 (cm)(b) 25 ( cm)(c)23 (cm)点作圆周运动,弧坐标的原点在 0点,顺时针方向为弧坐标的正方向,运动方程s=-:Rt2/2,s的单位是(cm), t的单位是(s)轨迹图形和直角坐标的关系如图表示。当点第一次x轴和y轴的投影分别为:ay=:2R(c)(c)2r ay= :. R汽车左转弯时,已知车身作定轴转动,汽车左前灯A的速度为VA,汽
9、车右前灯B的速度为vB, A、B之间的距离为b,则汽车定轴转动的角速度大小为 空S +巾 -叫(a)丄 (b)(c):(c)4.5.6.7.8.9.10.11.12.时钟上分针转动的角速度是 丄血肌)(rad/s) M(b)-.定轴转动刚体上点的速度可以用矢量积表示,速度可以用矢量积表示,它的表达式为(a), 匚(b)(b)(c) 一;三心:它的表达式为 ;刚体上点的加(a) (f)(c)二(e)(f) 亍:T-13. 直角刚杆AO = 2m , BO = 3m,已知某瞬时 A点的速度 I = 6m/s ;而B点的加速度与 BO成=60角。则该瞬时刚杆的角速度;二rad/s,角加速度(a)(c
10、) 53 ;(b)I、-:;I;(d) 9 T-:。14. 设1,2,3为定轴转动轮系,如轮1的角速度已知,轮3的角速度大小与轮2的齿数 轮3的齿数。(b)(a)有关;无关(b) 无关;有关 (c)有关;有关 (d)无关;无关15. 在图示机构中,杆 01A_02 B,杆 02 C_03 D,且 01 A = 200mm ,02 C = 400mm , CM = MD =cm/s,M300mm,若杆A01以角速度 J = 3 rad / s匀速转动,则D点的速度的大小为 点的加速度的大小为cm/s2。(b) (d)乡f 61 Ol(a) 60; (b) 120 ;(c) 450;(d) 360
11、。16. 在点的合成运动问题中,当牵连运动为定轴转动时 。(b)(a)一定会有科氏加速度(b)不一定会有科氏加速度(c) 一定没有科氏加速度图示机构中,O1A O2B,O1A O2B,01A_ O1O2,m,则1心2。(c)小于小于等于 (b)大于(c)(0A0i B ,AB_ 0A)时, 有;(a)(b)(b)小于 (c)大于则:-i:2。(a)(a)等于20.图示圆盘在水平面上无滑动地滚动,角速度边B点的加速度为 。(a) 0=常数,轮心A点的加速度为(b)2r,轮(d)(d)Ar(d)(d)0,轮边B23点的运动轨迹由直线和弧线组成,点作匀加速运动,如果保证直线与圆弧相切,则点的22.图
12、示圆盘在圆周曲线外侧纯滚动,角速度-=常数,轮心A点的加速度为,轮边B4少R + r2 (a)2r(b) R+f(c)/?打(c) 2 2 r2(d) 4c r(b) co2r2(a) 0(b) r(c)点的加速度为。(b)21.图示圆盘在圆周曲线内侧纯滚动,角速度=常数,轮心A点的加速度为R-r点的加速度为。(c)4护R-r运动速度是函数,加速度是函数。 (d)连续,不连续(a)不连续,不连续(b)连续,连续 (c)不连续,连续 (d)连续,不连续24. 两动点在运动过程中加速度矢量始终相等,这两点的运动轨迹相同。(b)不一疋(a) 一定 (b)不一定 (c) 一定不25. 平面图形上各点的
13、加速度的方向都指向同一点,则此瞬时平面图形的等于零。(b) 角加速度(a)角速度 (b)角加速度(c)角速度和角加速度26. 半径为R的圆盘沿直线无滑动地滚动,圆盘的瞬时速度中心P点的加速度ap指向圆心,ap 2r,这个加速度是P点的绝对运动的。(b)切向加速度(a)法向加速度(b) 切向加速度27. 刚体平动时刚体上任一点的轨迹空间曲线,刚体平面运动时刚体上任一点的轨迹平面曲线。 (b)可能是 ;一定是(a)定是;一定是(b)可能是;一定是(c)不可能是;一定是 (d)定是;可能是动力学。(c)(a)皆可能 (b)皆不可能 (c)不可能;(b)可能;(c)可能;(d)可能(d)(a)不可能;
14、(b)可能;(c)可能;(d)不可能2. 女口图所示,自同一地点,以相同大小的初速vo斜抛两质量相同的小球,对选定的坐标系Oxy,问两小球的运动微分方程、运动初始条件、落地速度的大小和方向是否相同? (b)!/a匕 , 运动微分方程和运动初始条件不同,落地速度大小和方向相同(b) 运动微分方程相同,运动初始条件不同,落地速度大小相同,速度方向不同(c) 运动微分方程和运动初始条件相同,落地速度大小和方向不同(d) 运动微分方程和运动初始条件不同,落地速度大小相同,速度方向不同3. 质点系动量的微分等于。(b)(a)外力的主矢(b)所有外力的元冲量的矢量和(c) 内力的主矢(d)所有内力的元冲量
15、的矢量和4. 质点系动量守恒的条件是 。(d)(a)作用于质点系的主动力的矢量和恒为零(b)作用于质点系的内力的矢量和恒为零(c)作用于质点系的约束力的矢量和恒为零(d)作用于质点系的外力的矢量和恒为零5. 边长为L的均质正方形平板,位于铅垂平面内并置于光滑水平面上,如图示,若给平板一微小扰动,使其从图示位置开始倾倒,平板在倾倒过程中,其质心C点的运动轨迹是。(d)(a)半径为L/2的圆弧;(b)抛物线;(c)椭圆曲线;(d)铅垂直线。6. 如图所示,已知质量为 M的刚体作平面运动,其角速度为-,质心C的速度为vc,A为刚体上任一点,C点相对于A点的矢径为rc,Ja,Jc为刚体的转动惯量,其转
16、轴分别过 A、 C两点且与图形垂直,则刚体对点A的动量矩为。(d)冏=Si(b)出讥X朋詁(c)- 二;- -(d) - - -7. 如图所示,已知两个均质圆轮对转轴的转动惯量分别为Ja、Jb,半径分别为Ra、Rb,作用在A轮上的转矩为 M,则系统中A轮的角加速度为 。(d)Tf二(b) 一上(d)心8. 如图所示。已知两个半径相等的轮子对其转轴的转动惯量分别为Ji、J2,皮带单位长度质量为,轮心距OQ2=I,轮子转动的角速度为-.O此系统的动能为。(a)討詞+M+曲)沪*(b)T二押0 +押新+外+斶以0(c)(d)T二側 +戚切* +曲3)卅+妒9. 如图所示坦克的履带重为P,两轮共重Q,
17、车轮被看成均质圆盘,半径均为 R,两轴间的距离为R。设坦克前进的速度为V。此系统的动能为。(d)汐+扫如(b)T 二V2 +-v4g g(c)(d)(c)(c)至少有三根相互垂直的旦10. 对于刚体上任一点惯性主轴。(a)只有一根(b)至少有二根相互垂直的11. 刚体作定轴转动时,附加动压力为零的必要充分条件是。(c)(a)刚体质心位于转轴上(b)刚体有质量对称面,转动轴与对称面垂直(c) 转动轴是中心惯性主轴(d)刚体有质量对称轴,转轴过质心并与该对称轴垂直12. 虚位移原理与静力学平衡方程都可以用来求解平衡问题,。(b)(a) 二者都给出了质点系平衡的必要充分条件而虚位移原理却给出了任意质
18、(b) 但静力学平衡方程只给出了刚体平衡的必要充分条件, 点系平衡的必要充分条件13.曲柄连杆机构如图所示。其系统的自由度数为,约束方程有。(a) (c)(a) 一个 (b)二个(c)三个14球摆中质点M到固定中心点 0的距离等于摆长I,点M的位置限制在以0为中心、I为半径球面上,如图所示。该系统的自由度数为,约束方程有。(b)(a)(a) 一个(b) 二个(c)三个15. 一平面双摆,OA=a,AB=b,如图所示。该系统的自由度数为 ,约束方程有。(b)(b)静力学1. 力是物体间的相互作用,其结果使物体的动态和形态发生变化(包括变形)。2. 力系就是作用在物体上的 一群力 。3. 在一般工
19、程问题中,物体平衡是指相对地球处于静止或匀速直线运动状态。4. 力对物体作用的效果取决于力的三要素:力的大小、力的方向和力的作用点,力是个矢量。5. 作用力与反作用力的大小相等,方向相反,作用在两个不同的物体上6. 在任一力系中加上或减去一个平衡力系,并不改变原力系对刚体的效应。7. 平面汇交力系可以合成为丄个合力,其结果有一2_种可能情况,即合力 等于 零或合力不等于零 。8. 物体的受力图是表示研究对象所受的主动力和约束反力的简图。9. 平面汇交力系的合力其作用线通过 力系的汇交点,其大小和方向可用力多边形的封闭边表示。10. 平面汇交力系,有 两 个独立的平衡方程,可求解两 个未知量。1
20、1. 力在正交坐标轴上的投影的大小与力沿这两个轴的分力的大小相等;力在不相互垂直的两个轴上的投影的大小与力沿这两个轴的分力的大小不相等 。12. 作用在刚体上的两个力 Fa、Fb,若满足Fa = Fb的条件,则该两力可能是一对平衡 力或一个力偶。13. 平面力偶系有1_个独立的平衡方程;平面平行力系有2个独立的平衡方程。14. 力偶在任一轴上的投影恒等于零,功偶对其作用面内任一点的矩等于力偶矩,亟 矩心的位置无关。15. 平面任意力系二力矩式平衡方程的限制条件是二矩心不能与投影轴相垂直16. 平面任意力系向作用平面内指定点简化的结果,可能有4 种情况,这些情况是:1) 主矢等于零,主矩等于零,
21、这是平衡情况;2)主矢等于零,主矩不等于零,这是力系简化为合力偶情况;3)主矢不等于零,主矩等于零,这是力系简化为合力情况 ;4)主矢不等于零,主矩不等于零,这是力系可以再简化为合力情况。17. 平面任意力系向作用平面内指定点简化的结果,可能有4 种情况,这些情况是:1)主矢等于零,主矩等于零,这是平衡情况; 2)主矢等于零,主矩不等于零,这是力系简化为合力偶情况;3)主矢不等于零,主矩等于零,这是力系,这是力系可以再简化为简化为合力情况;4)主矢不等于零,主矩不等于零合力情况。18.19.平面力偶等效的充分与必要条件是由等值、反向、不共线的两平行力所组成的力系,称为力偶。它对刚体仅产生转动
22、效应,并用力偶矩来度量。力偶矩相等20.平面内一非平衡共点力系和一非平衡力偶系最后可能的合成结果是一合力。21.两个相接触的物体有 相对滑动 或相对滑动趋势 时,其接触处有阻碍 其滑动的作用,这种阻碍作用称为滑动摩擦力。滑动摩擦力的方向与 相对滑动或相 对滑动趋势相反。22.摩擦角是:m是最大静滑动摩擦力 角。与法向约束力的合力与支承面的法线间的夹23.24.当作用在物体上的主动力系不论该合力大小如何,物体总是处于平衡状态,这种现象称为摩擦角-m与静滑动摩擦因数f之间的关系为 tanm =的合力作用线与接触面法线间的夹角:小于:m时,自锁25.空间汇交力系有3 个独立的平衡方程;空间平行力系有
23、程;空间力偶系有 3 个独立的平衡方程。3 个独立的平衡方26.空间的力对点之矩是定点矢 量;空间力偶矩矢是自由矢是代数量。量;力对轴之矩27.作用在刚体上的力可平移到刚体上任意指定点,欲不改变该力对刚体的作用效果, 必须在该力与指定点所决定的平面内附加一力偶,其力偶矩矢等于该力对指定点之矩矢28.29.空间力偶等效条件是若空间力系有合力时,合力对任一点之矩矢等于 和;合力对某轴之矩矢等于力偶矩矢相等力系中各力对同一点之矩的矢量力系中各力对同一轴之矩的代数和某一平面平行力系各力的大小、方向和作用线的位置如图所示,试问此力系简化的30.无关。31.已知 A( 1,0,1),B( 0,1,2)(长度单位为米),F=T-; kN。则力F对x轴的33. 曲杆AB自重不计,在五个已知力的作用下处于平衡,试问作用于点B的四个力的合力FR的大小Fr= F5 ,方向沿 AB 。34. 单个物体在考虑摩擦力的平衡问题中,当 OW FsW Fmax时,物体都能保持平衡但是这时物体处于平衡有一个范围 。当Fs =Fmax时,物体处于临界平衡状态,这时摩擦力为fsFN。35. 已知A重100kN , B重25k
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 人教版数学六年级下册1.1负数练习卷含答案
- 宣化科技职业学院《人体解剖生理学》2023-2024学年第一学期期末试卷
- 天津生物工程职业技术学院《医学气功与方法》2023-2024学年第一学期期末试卷
- 三亚航空旅游职业学院《深基坑工程理论与实践》2023-2024学年第一学期期末试卷
- 运城学院《报刊选读(俄)(一)》2023-2024学年第二学期期末试卷
- 云南轻纺职业学院《中学体育教学专题案例分析》2023-2024学年第一学期期末试卷
- 西安航空学院《心理统计学》2023-2024学年第二学期期末试卷
- 四川省德阳市东湖博爱中学2024-2025学年初三4月质量检查物理试题试卷含解析
- 人教PEP版英语五年级下册教学课件Unit 5 Part B 第三课时
- 江苏省苏州市吴江汾湖中学2024-2025学年高三下学期期末考试数学试题理试题含解析
- 教学实验常用低值易耗品目录表(玻璃器皿类)
- 人教精通版四下Lesson 23课件
- 自动转运小车结构及控制系统设计说明书
- 饮水设备巡查维护记录表
- 洛阳十三朝古都课件
- RomaxDesigner 培训教程(合)教学提纲
- 《中国传统服饰——汉服》PPT课件
- 顾洁Storytime
- 小学信息技术认识《画图》
- 【精品】宇通客车涂装车间实习报告
- 冷冻机的制冷效率与运行电费
评论
0/150
提交评论