



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
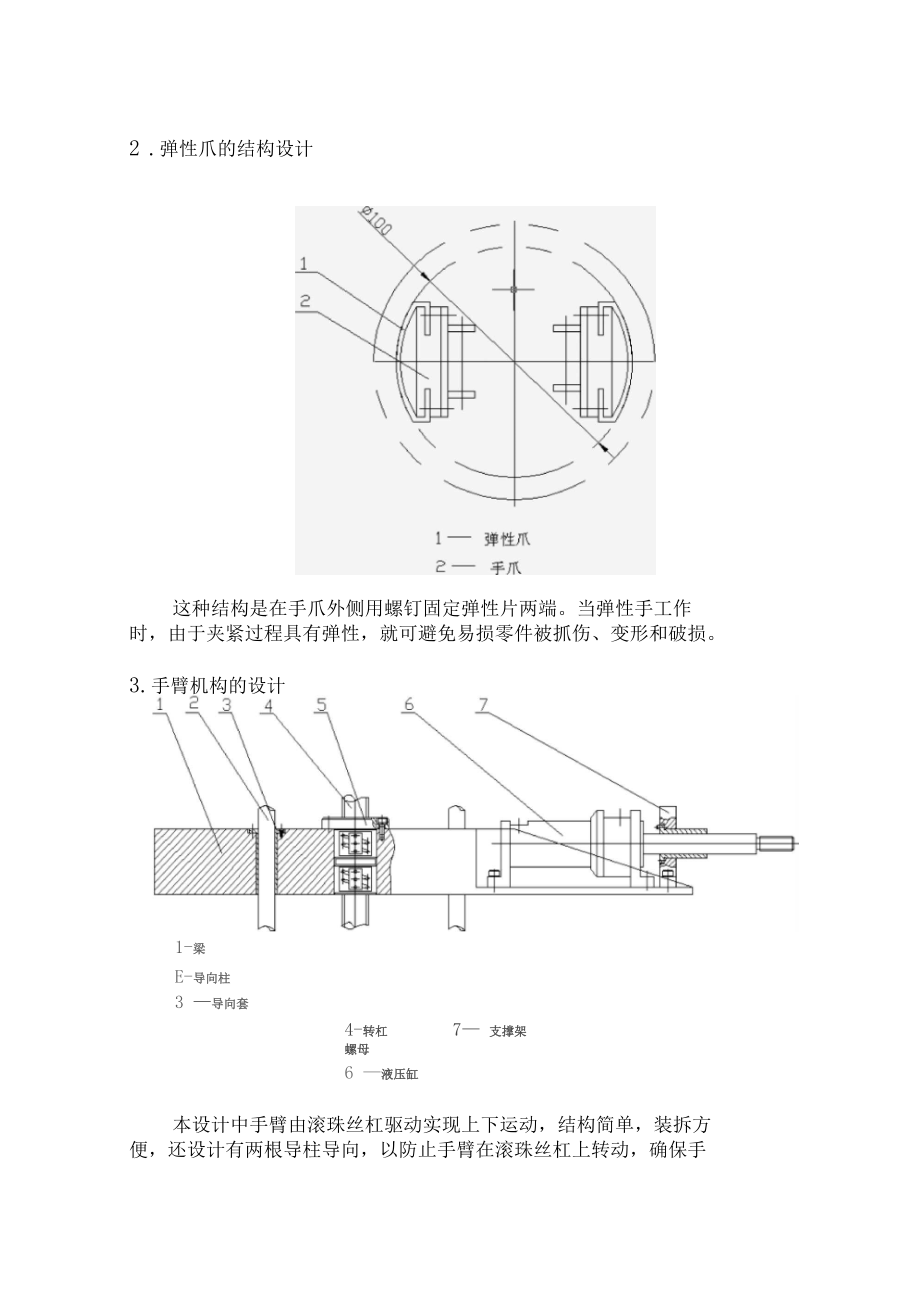
1、自由度圆柱坐标型工业机器人设计学院:机电工程学院班级:姓名:学号:基座执行机构驱动机构机械系统控制系统智能系统工业机器人1 .末端执行机构设计12341 漉压缸2 推杆3 钳爪4平衡那簧5 -弹性爪采用内撑连杆杠杆式夹持器,用小型液压缸驱动夹紧,它的结构形式如图。内撑连杆杠杆式夹持器采用四连杆机构传递撑紧力, 即 当液压缸1工作时,推动推杆2向下运动,使两钳爪3向外撑开,从 而带动弹性爪4夹紧工件。该种夹持器多用于内孔薄壁零件的夹持。2 .弹性爪的结构设计这种结构是在手爪外侧用螺钉固定弹性片两端。当弹性手工作 时,由于夹紧过程具有弹性,就可避免易损零件被抓伤、变形和破损。3.手臂机构的设计1-
2、梁E-导向柱3 导向套4-转杠7 支撑架螺母6 液压缸本设计中手臂由滚珠丝杠驱动实现上下运动,结构简单,装拆方 便,还设计有两根导柱导向,以防止手臂在滚珠丝杠上转动,确保手臂随机座一起转动。它的结构如下图。选用轴向脚架型液压缸,活塞杆末端为外螺纹结构,手臂与末端执行器连同活塞杆一起转动。4 .腰部和基座设计1支座,2步进电机,3谐波齿轮,4转动机座5支承才g钢梁,6滚珠丝杠,7导向柱,8锥环无键联轴器通过安装在支座上的步进电机和谐波齿轮直接驱动转动壳体转动,从而实现机器人的旋转运动;通过安装在顶部的步进电机和联轴器带动滚珠丝杠转动实现手臂的上下移动。采用双导柱导向,防止手臂在滚珠丝杠上转动,确
3、保手臂随机座一起转动。支撑梁采用梢钢,以减轻重量和节省材料,它的结构如上图。5 .驱动方式的选择各种驱动方式比较一比较内容n驱动方式'机械传动。电机驱动口气压传动-液压传动口异步电机, 直流电机1步进或伺服 电机n输出力 矩口输出力矩较大产输出力亘 较大,输出力矩较 小气体压力小,输 出力矩小,如需 输出力矩较大, 结构尺寸过大C液体压力高,可以 获得较大的输出力,控制性 能户速度可图,速度 和加速度均由机 构控制,定位精 度高,可与主机 严格同步1控制性能 较差,惯性 大,步易精 雕位炉控制性能好, 可精确定位, 但控制系统复杂产可高速,气体压 缩性大,阻力效 果差,冲击较严 重,精
4、确定位较 困难,(S速场油液压缩性小,压 力流量均容易控 制,可无吸漏速, 反应员软,可实现 连续轨迹控制产应用范困年适用于自由度少 的专用机械手, 高速低速均能适用口适用于抓 取重量大 和速度低 的专用机 械手裂可用于程序 复杂和运动 轨迹要求严 格的小型通 用机械手炉中小型专用通 用机械手都有中小型专用通用机 械手都有,特别时 重型机械手多用口由上表知步进电机应用于驱动工业机器人有着许多无可替代的 优点,如控制性能好,可精确定位,体积较小可用于程序复杂和运动 轨迹要求严格的小型通用机械手等,所以本设计采用它来实现机器人 的旋转和上下移动。选电机为BF反应式步进电机,型号为:90BF001由
5、上表知,液压驱动方式反应灵敏,可实现连续轨迹控制,液体压 力高,可获得较大的输出力,因此机器人的伸缩运动采用液压驱动方 式来实现,从而使机器人容易找准工件。它的型号为 Y-HG1-C50/28X 100LJ1HL1Q它的主要技术参数如下表|冶金设备标睢液压油技术规格*/nun*3活塞“杆直径/im油口直径速度比卡通径v联接螺线41,46 42卓50r23炉36P10PM13k145/6 .工业机器人的计算机控制系统概述工业机器人具有多个自由度,每个自由度一般包括一个伺服机 构,它们必须协调起来,组成一个多变量控制系统。这种多变量的控 制系统,一般要用计算机来实现。因此,机器人控制系统也是一个计
6、 算机控制系统。控制系统的功能是控制机器人操作机的运动和操作以 满足作业的要求。在作业中机器人的工作任务是要求操作机的末端执 行器按点位或轨迹运动,并保持设定的姿态。在运动中或在规定的某 点位执行作业规定的操作。7 .工业机器人运行时应采取的安全措施工业机器人能代替人在危险有害的环境中作业, 但又给人另一种 危险,即机器人伤人事故。这是工业机器人安全管理的最为重要的一 条原则。止匕外,除了通用的工业安全规程外,还要注意工业机器人的 特殊性,采取相应可靠的对策。对工业机器人应用工程的安全要求有 如下几条:必须为工业机器人和周边设备安装安全护栏,以防止人靠近而造 成伤害。工业机器人的动作范围不能超越护栏。 在护栏出入口的门上 必须设置插拔式电接点开关,其插座有导线与控制系统的电路连接。
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 灌溉井浇地协议书
- 甲乙丙送货协议书
- 海盐市消防协议书
- 旧合同补充协议书
- 炸药库看守协议书
- 淘宝客线下协议书
- 淘宝店装修协议书
- 正畸结束后协议书
- 女职工岗位协议书
- 经销商保密协议书
- 2025购销茶叶合同范本
- 山东济南历年中考作文题与审题指导(2005-2021)
- 职业技术学院2024级工业互联网技术专业人才培养方案
- 罗森加盟合同协议
- 2025年中考英语押题预测卷(徐州专用)(原卷版)
- 锝99mTc替曲膦注射液-药品临床应用解读
- 武汉各区2023-2024学年九下化学四调压轴题分类汇编-第8题选择题
- 脑血管造影术的术前及术后护理
- 外墙涂料施工劳务合同范本(8篇)
- 成人重症患者颅内压增高防控护理专家共识2024
- 网络灾难与信息安全应急
评论
0/150
提交评论