



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
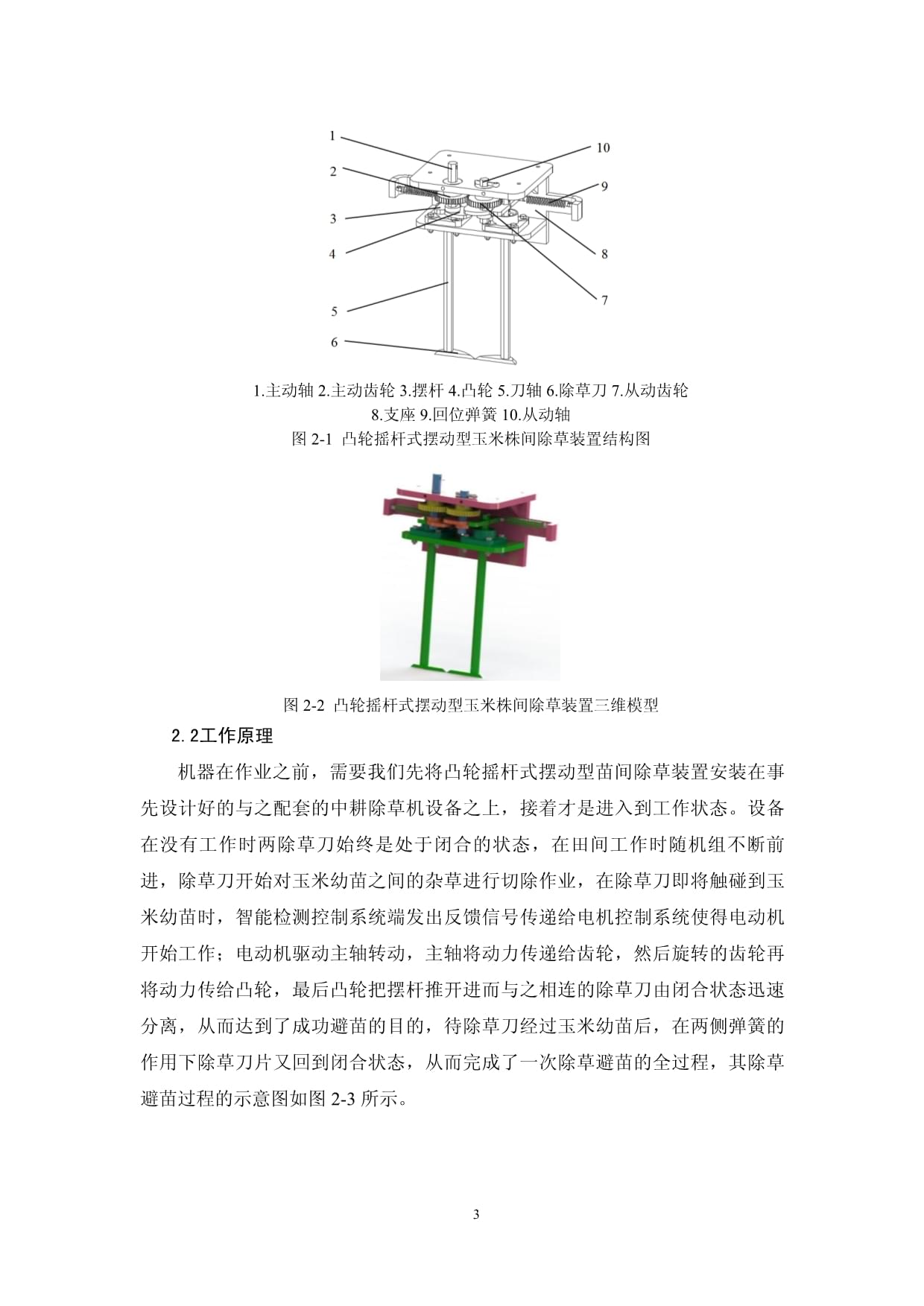
凸轮摇杆式摆动型玉米株间除草装置优化设计摘要:近年来,国内外对草害的研究热度一直未减,除草方式多种多样,除草设备也在不断地更新。为了有效地减轻农民的劳动强度,缓解除草剂中化学物质对环境造成的不良影响,加大对机械除草的研发力度势在必得。结合东北地区玉米种植模式与土壤环境的特点,本文旨在设计一种国内机械除草设备研究中存在不足的苗间除草装置。主要研究内容和结论如下:株间除草装置主要是利用凸轮摇杆摆动机构的运动来实现除草刀在苗间的除草作业,该除草装置旨在降低常规耕作苗间除草时玉米幼苗的受损率,提高苗间除草的效率。主要对株间除草装置关键部件的结构及工作原理进行了分析,建立了装置除草过程路径的数学模型,并对除草路径进行优化处理,在理论分析的基础上对关键部件凸轮摇杆、除草机构进行结构设计。关键词:苗间除草装置;玉米幼苗;摇杆机构;优化设计绪论我国作为农业大国,农业的快速发展是社会稳定和人民生活水平提高的重要标准。玉米是我国主要农作物之一,也是世界上最重要的食粮作物之一,特别在非洲比较落后的国家,玉米作为其主要口粮,具有重要的经济和社会价值。我国种植的玉米比较杂乱,地块大小不一,行距株距多种多样,玉米的种植主要集中在我国北方地区。对于不同地区的玉米种植,影响玉米产量的因素之间也有很大的差异性,根据有关统计数据显示,不同的玉米品种,各地方不同的生产管理模式,草害情况等都会直接影响到玉米的产量,其中草害情况对玉米产量的影响最为显著。杂草是整个农业生态环境中不利的一部分,它的泛滥也是导致玉米减产的重要原因之一。杂草与玉米在生长的过程中存在着竞争关系,它不仅与玉米幼苗争抢水肥,而且杂草生长速度比作物幼苗要快得多,先生长起来的杂草占据幼苗的生长空间使得幼苗光照严重不足,很难正常生长发育起来,最终导致玉米产量受损。苗间除草是我国精细农业田间中耕管理作业的重要部分之一,也是国内除草设备体系中尚未完善的地方。田间中的杂草不仅存在于行与行之间,作物株与株之间的杂草也不可小视,杂草的生命力往往要比作物幼苗要顽强得多,而且生长速度较快,它与作物幼苗争抢水肥、光照,如果杂草得不到有效地控制将会导致玉米产量和品质大幅度下降。而除草是田间中耕管理十分繁琐又十分繁琐的过程,而且需要在杂草很小的时候短时间内将其除掉,杂草生长的周期性较强,除草过程用工量较大。当前,国内主要以化学除草为主,人工除草、机械除草为辅的一种模式。喷洒除草剂是一种化学除草方式,是我国目前农民采用最多的一种除草手段,除草剂中含有的一些化学物质的确可以有效的杀死杂草,但同时也会影响到作物幼苗的正常生产,不宜过多使用;在我国贫困山区最原始的人力除草最为常见,虽然除净率高、除后杂草不易存活,但劳动强度大。近年来,有关工作部门为了有效地减轻农民的劳动强度,缓解除草剂中化学物质对环境造成的不良影响,开始大力开发高效环保的机械除草设备。国内对田间作物行间除草设备的研发技术已经比较成熟,研制出了各式各样的除草机。但是,对于生长在玉米苗与苗之间的杂草,由于杂草比较靠近玉米植株,用现有的除草机无法达到除草的目的,这也是机械除草中将要面临的一个很大的难题。有鉴于此,开发和设计一种新型的株间除草设备至关重要,通过对除草机关键部件的研究设计来降低整机功耗意义重大。凸轮摇杆式摆动型玉米株间除草装置结构及工作原理装置结构组成除草装置主要由转轴、弹簧、齿轮、凸轮、除草刀片等组成,如图2-1所示。该设备主要通过转轴、齿轮以及凸轮摇杆等关键工作部件之间的密切配合来实现玉米株间除草避苗的过程,进而达到玉米幼苗间除草的目的,这种方法即高效又实用。1.主动轴2.主动齿轮3.摆杆4.凸轮5.刀轴6.除草刀7.从动齿轮8.支座9.回位弹簧10.从动轴图2-1凸轮摇杆式摆动型玉米株间除草装置结构图图2-2凸轮摇杆式摆动型玉米株间除草装置三维模型工作原理机器在作业之前,需要我们先将凸轮摇杆式摆动型苗间除草装置安装在事先设计好的与之配套的中耕除草机设备之上,接着才是进入到工作状态。设备在没有工作时两除草刀始终是处于闭合的状态,在田间工作时随机组不断前进,除草刀开始对玉米幼苗之间的杂草进行切除作业,在除草刀即将触碰到玉米幼苗时,智能检测控制系统端发出反馈信号传递给电机控制系统使得电动机开始工作;电动机驱动主轴转动,主轴将动力传递给齿轮,然后旋转的齿轮再将动力传给凸轮,最后凸轮把摆杆推开进而与之相连的除草刀由闭合状态迅速分离,从而达到了成功避苗的目的,待除草刀经过玉米幼苗后,在两侧弹簧的作用下除草刀片又回到闭合状态,从而完成了一次除草避苗的全过程,其除草避苗过程的示意图如图2-3所示。图2-3凸轮摇杆式摆动型苗间除草装置除草避苗过程凸轮摇杆式摆动型玉米株间除草装置关键部件设计除草刀片的设计除草刀片是本装置最关键部件之一,为保证该装置尽量发挥出更高性能,应结合地区环境、工作环境和功耗等因素对该部件仔细研究。其研究方向包括选用钢材、切刃曲线设计及尺寸等。刀片结构尺寸的优化设计如图3-1所示,除草刀片的结构尺寸包括刀宽L1,除草刀回转中心与刀尖距离L2和至刀背距离L3,除草刀的宽度直接影响到除草作业程度的好坏,如果尺寸过小就会大大降低苗间覆盖率,除草率也会随之降低,尺寸过大则会增加整机功耗,根据前人大量的实验研究,一般取l/2≤L1≤l,l为垄台宽度。我国东北垄作地区垄台的尺寸大部分在175mm左右,根据相关研究结果取L1=0.6l=105mm。选取适当的刀片回转中心能够大大减小其工作时所需的阻力矩,取l/4<L2<L1,则L2取65mm,L3取11mm。1.玉米苗2.除草刀3.玉米垄台图3-1除草刀片结构尺寸示意图刀刃曲线设计苗间除草装置最直接的工作部件就是除草刀片,除草刀的结构尺寸对除草效果、伤苗率以及整机功耗有一定的影响。同时,为了避免发生刀尖缠草的现象,可以将刀片设计成斜切口,机具在工作的过程当中,当遇到杂草的时候,就能够通过刀片的两端划开,滑切的存在也可以有效地降低功率消耗。在设计刀片刃口线时采用阿基米德螺线式曲线。其曲线方程为: (3-1)式中r—曲线上某点的极径,mm;r0—曲线开始极径,mm;K—滑切角值与极径的比例系数;θ—曲线上某点的极角,rad。通过查阅《农业机械设计手册》最终确定r0为110mm,K取0.75除草机刀片在作业的过程中始终与土壤接触,因此刀片应选用耐磨性较好的材料,45号钢表面经过热处理后其硬度可以达到HRC45;如果除草刀片厚度过薄在进行热处理时很容易产生较大的弯曲量,因此除草刀不宜过薄,本设计中选择除草刀的厚度为8mm,除草刀三维图如图3-2所示。1.除草刀片2.刀片固定杆图3-2除草刀三维图凸轮摇杆机构设计由前一章对凸轮摇杆式摆动型苗间除草装置工作原理的分析可知,凸轮机构的结构参数直接影响到苗间除草时除草效果和避苗性能,凸轮轮廓曲线的形式直接决定了除草避苗的运动路径,本采用解析的方法设计凸轮机构的曲线基本思路,在控制刀片除草的过程中根据避苗轨迹要求,选择各个时刻合适三维凸轮角度,弄清摆杆的最大移动量。只有在凸轮运动轨迹恰到好处时,才能实现避苗除草的目的。可以借助凸轮机构基本参数和运动方程来设计比较符合要求的轮廓曲线。凸轮机构最大移动量及运动角的确定对玉米幼苗基本物理参数进行测定,测量得到玉米土下15mm左右处根系的宽度大部分都居中在43mm左右。在设计凸轮机构的时候就可以确定好它的直径应取d1=60mm,这样一来就能够保证在幼苗根部生长的最大范围内进行除草,可以通过图3-3发现,本文取L=d1。通过图解法可推导出两除草刀最大摆动角度为π/4,此时凸轮最大移动量为ψm=π/4。图3-3凸轮机构最大张角示意图通过上文对除草装置的工作过程进行理论分析,可以发现凸轮结构参数对除草效果有着直接的影响,为了满足除草设备在工作的过程中能够成功地避开玉米幼苗进行除草,为此设计了凸轮外轮廓曲线所形成的转动的角度,确定了摆杆的最大位置点。根据凸轮的工作原理,在设计凸轮时,通过运动方程来确定凸轮的外轮廓曲线。如图3-4a所示,凸轮的运动角由推程运动角ϕ、回程运动角ϕ'、远休止角ϕs、近休止角ϕ's组成。a)凸轮工作段b)避苗运动轨迹图3-4凸轮工作段及在避苗轨迹上对应的位置为更进一步解释避苗运动轨迹可得其设计要求主要有: (3-2)同时有: (3-3)式中v0—除草机前进速度,m/s;ω—凸轮角速度,rad/s;SCD—凸轮转过远休止段,除草刀移动的距离,m;SFB、SEF—凸轮转过近休止段一半,除草刀移动的距离,m。将式(3-3)代入式(3-2)可求得5π/24<ϕs<3π/8,ϕ's<ϕs。凸轮各区间段要按照一定原则进行划分:增大凸轮推程工段,确保两除草刀片能够快速无误地分开形成一定的空间距离;凸轮能够从推进工段慢慢的过渡至回位工段,此过程是为了确保除草刀片安全顺利渡过玉米苗;凸轮再由回位工段快速的过渡至推程工段,有效地增加了除草刀在苗与苗之间的停留时间,大大提高了除草效果。由上文避苗路径的理论分析,得知凸轮近静止角为11π/36,推出角为2π/3,返回角为2π/3,远静止角为13π/36。凸轮运动规律选择及基本参数确定为了使凸轮运动时不产生振动并减小凸轮外缘与摆杆之间的冲击,凸轮运用正弦加速度运动机理,摆杆位移的计算公式为: (3-4)式中φ—凸轮运动角,rad;Ψ—凸轮摆角,rad。凸轮机构的基圆半径Rb和中心距LOA,都是根据凸轮外轮廓曲线运动规律得到的。如图3-5所示,凸轮机构的中心距取合理的值时,可大大降低机构作业的总推力,FN为凸轮作用在摆杆上的推力,计算凸轮机构中心距的公式为: (3-5)式中Mr—摆杆的工作力,N;JA—摆杆绕轴心转动的惯动矩,kg﹒m;LAT—摇杆回转中心与凸轮接触点的距离,m。图3-5凸轮机构基本参数本文取凸轮机构的中心距为LOA=63.5mm。选择基圆半径的基本依据是要保证平底从动件凸轮外轮廓都呈现外凸的形式,即凸轮的曲率半径Rk始终大于0。 (3-6)其中 (3-7)在Rk=0时,基圆半径Rbmin=35mm,在设计中取基圆半径Rb为37mm。凸轮机构轮廓曲线的设计如图3-6所示,以点O为坐标原点,建立平面直角坐标系xOy。图3-6凸轮机构轮廓曲线设计根据运动的理论分析,利用反转的方法得出凸轮轮廓曲线在二维坐标轴上的计算公式: (3-8)式中θK——凸轮廓线的极角,rad;ρK——凸轮廓线的极径,m。其中 (3-9) (3-10)将从动件运动角参数和相应的凸轮转角代入式(3-8),可以计算出凸轮轮廓的坐标值,凸轮三维模型如图3-7所示。图3-7凸轮三维模型图摆杆长度的确定选择合适的摆杆长度,可以提高整个装置的除草效率,以下面就是摆杆长度的计算公式: (3-11)且摆杆边缘点至轴心的距离也应满足: (3-12)将相关数据代入上式,可以计算出摆杆长度为65mm。凸轮摇杆式摆动型苗间除草装置运动轨迹分析与建模除草刀避苗运动轨迹分析如图4-1所示,L1为两棵玉米苗之间的距离,d1为玉米苗根部保护区,根据东北地区垄作种植的特征,本章将除草过程中的避苗运动轨迹假设成“菱形”,避苗过程可以细分为三个部分:两刀片分离过程、除草刀以最大开度角通过苗区过程、两刀片回位闭合的过程。图4-1除草装置避苗运动轨迹规划除草刀运动轨迹数学模型建立在除草的整个过程中,不同时刻两除草刀所处的状态顺序为:分离,越苗和闭合三个状态。分离、闭合过程是合成运动,越苗过程是均匀的直线运动。选择刀片尖点M进行分析,以除草刀的回转轴作为坐标原点,X轴的正向为机具的移动方向。除草刀运动轨迹的数学模型如图4-2所示。在除草的整个过程中,刀片尖点M的轨迹方程为:两刀片分离过程: (4-1)除草刀越过玉米苗过程: (4-2)除草刀回位过程: (4-3)式中ρ—M点的极径,m;θ0—初始时M点和坐标原点连线与x轴方向的夹角,rad;S0—从初始到完全张开,除草刀的位移,m;θ1—刀齿张开到最大位置时M点极径与x轴方向的夹角,rad;ω1—刀片角速度,rad/s;S1—除草刀越苗过程中,其所走的位移,m。由以上几式可知,除草的整个过程中刀片尖点M的运动路径与机具移动速度和刀片角速度有关。在确定好除草刀曲线运动轨迹方程后,通过任意改变机具移动速度或刀片角速度都可使得除草刀运动路径发生变化,以提高苗间除草效果。可计算出三个运动时刻刀尖M点的绝对速度: (4-4)式中va1—除草分离开过程中,M点的绝对速度;va2—除草刀越苗过程中,M点的绝对速度;va3—除草刀闭合过程中,M点的绝对速度。图4-2除草刀运动学分析由式(4-4)可以看出,刀片的结构尺寸大小及有关参数对除草刀尖点M的绝对速度起到一定的影响。依据前人的研究成果以及自己的理论分析可以得出除草刀片的绝对速度对除草率和伤苗率都具有不同程度的影响。随着速度的不断提高,除草效果也随之增大,但伤苗情况也不断加剧。通常绝对速度不高于4m/s,除草机的作业速度一般为0.6~1m/s,ρ为0.071m,θ0为11π/180,θ1为13π/45,将已知参数代入上式,可以得到其转速范围为130~150r/min。结论因为株间机械除草的工作环境不仅复杂且干扰因素繁多,想要单方面的研究除草机械使其达到理想的苗间除草效果是十分困难的。本文针对玉米苗间除草技术还存在许多不足之处,结合现有机型的结构特点,借助现有的计算机模拟技术设计了一种凸轮摇杆式摆动型玉米苗间除草装置,借助三维软件完成了对装置结构的立体建模。同时对除草装置的工作过程进行描述,完成了对除草装置除草避苗轨迹的分析,并建立避苗运动路径数学模型。对除草装置的关键部件进行结构设计和理论分析,根据玉米幼苗根部分布情况,设计了除草刀的总体尺寸,使装置在除草率与能耗之间相互调和,使其即拥有良好的工作效率,有尽可能地降低能耗,与此同时杜绝刀尖缠草的现象发生;通过模拟装置避苗过程确定除草装置避苗轨迹为“菱形”,将凸轮外缘轮廓设计四个工作区间,将数值代入公式确定凸轮外缘轮廓曲线;采用反转法建立凸轮轮廓曲线方程,得到了合理的凸轮轮廓曲线,最终确定了摆杆的长度。参考文献权龙哲,张景禹,姜伟,李
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 心理干预技术的评估试题及答案
- 2024心理咨询师考试深度访谈试题及答案
- 中医康复理疗师考试难易程度分析试题及答案
- 中医康复理疗师重点试题及答案梳理
- 2025-2030年金车木地板项目商业计划书
- 2024年初中语文常识测验及答案
- 【初中生物】人类的食物教案2024-2025学年北师大版生物七年级下册
- 心理咨询师考试框架搭建与试题及答案
- 语言的结构与功能试题及答案
- 2025-2030年视频电话会议系统项目商业计划书
- 2024年中科院心理咨询师官方备考试题库-上(单选题)
- TCHAS 10-3-6-2023 中国医院质量安全管理 第3-6部分:医疗保障多学科联合诊疗(MDT)
- 2015医院处方集(妇幼保健院)
- 电梯救援演练方案及流程
- 水库大坝红火蚁防治投标方案(技术方案)
- 部编版四年级下册必读《十万个为什么》阅读测试题(分章节)
- 5G网络安全挑战与应对策略
- 小组合作学习小组长培训
- 《两弹一星》课件
- 乐理视唱练耳简明教程课后习题答案
- 如何培养幼儿的语言表达能力
评论
0/150
提交评论