



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
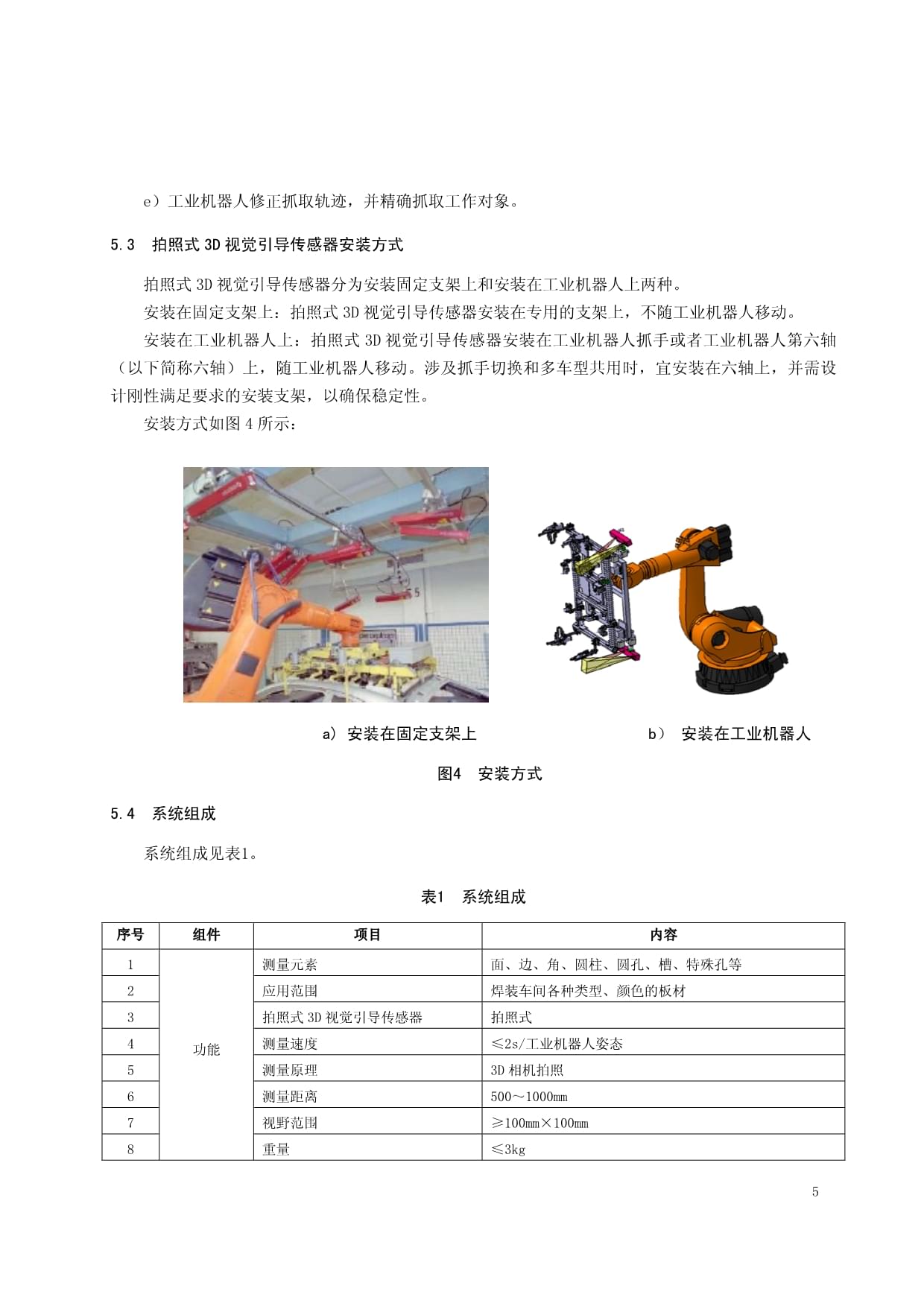
智能视觉引导安装系统技术要求范围本文件规定了智能视觉引导系统基本组成、系统原理、定位原理、运行方式、系统硬件与软件要求、设备清单及技术参数等。本文件适用于广西行政区域内汽车白车身的自动化焊装生产线、风挡玻璃自动化安装导入的工业机器人视觉引导系统设备及相关组件。规范性引用文件本文件没有规范性引用文件。术语和定义下列术语和定义适用于本文件。汽车白车身Automobilebodyinwhite汽车白车身是指完成焊接但未涂装之前的车身,不包括四门两盖等运动件。智能视觉引导系统Intelligentvisualguidancesystem利用智能视觉检测技术和工业机器人运动学原理,实现工作对象的拍照式3D定位,引导工业机器人根据工作对象的位置变化,调整工作轨迹,以促进生产效率、提高生产质量。拍照式3D视觉引导传感器Photographic3Dvisualguidancesensor高精度的拍照式3D视觉引导传感器主要用于取件工业机器人的“抓手”对工作对象的抓取等操作的视觉感知,结构紧凑,拍照范围广。拍照式3D定位Photographic3Dpositioning利用拍照式3D视觉引导传感器拍照,通过特征提取和特征匹配,并结合特征之间的相对位置信息,实现工作对象在拍照式3D视觉引导传感器建立的坐标系下的3D定位(在参考坐标系x、y、z方向上的移动和旋转)。智能视觉引导系统系统原理视觉引导系统结合了视觉检测技术和工业机器人运动学原理,旨在为取件工业机器人安装“眼睛”,通过激光测量或图像处理等算法运算出工件实际3D姿态与理论基准3D姿态的偏差(x,y,z,Rx,Ry,Rz),再反馈给取件工业机器人调整运动轨迹,解决取件工业机器人只能单纯地重复示教轨迹的限制,使其能根据被操作工件的位置变化实时调整工作轨迹,促进生产效率,提升生产质量。拍照式3D定位原理,基于特征点的拍照式位姿确定方法,通过已经经过标定的相机对目标拍照,利用目标图像上至少4个非共线特征点的图像坐标,以及特征点在空间中相对位置关系,建立目标约束方程,求解目标与相机间的相对位置和相对姿态,如图1所示。图1拍照式3D定位原理利用工作对象上的特征点间几何关系的基本思想是利用几何模型来表示物体的结构和形状,并通过提取某些物体特征点,在模型和图像之间建立起对应关系,然后通过几何或者其它方法实现物体空间姿态的估计。基本组成视觉引导系统硬件包含:图像处理工控机、拍照式3D视觉引导传感器、安装于抓具上的一体式摄像头、图像处理工控机通过I/O和网线与工业机器人通讯的线路。视觉引导系统基本构成如图2所示。图2引导系统基本构成视觉引导系统软件包含:测量控制软件和数据查询与分析软件。根据工位工艺情况,为增强功能、集约配置、优化功能与成本,视觉引导系统的设备结构配置可扩展为图3所示。图3扩展的视觉引导系统设备结构配置例如:汽车白车身左、右侧围焊合总成视觉引导方案,可以设计为左、右侧围焊合总成各一套独立的视觉系统,每个抓手支架上安装3个视觉传感器,考虑到左、右侧围焊合总成上件位置距离不远,为了节约成本和小型化设计,两个视觉工控机统一放置于一个控制柜内,共用一台显示器显示操作界面(支持切换)。运行方式拍照计算偏差与轨迹修正取件工业机器人每运动1次,视觉传感器同时对工作对象上特征孔进行拍照,利用3D视觉引导算法计算工作对象位置及角度的偏移,并反馈修正取件工业机器人的抓取轨迹。视觉引导取件流程视觉引导取件流程如下要求:a)工业机器人运动至工作对象前约800mm处。b)工业机器人运动1次,拍照式3D视觉传感器对工作对象4处不同的特征孔进行拍照。c)利用3D视觉引导算法,确定工作对象的位置及角度偏移。d)计算工业机器人运动修正值,反馈至工业机器人。e)工业机器人修正抓取轨迹,并精确抓取工作对象。拍照式3D视觉引导传感器安装方式拍照式3D视觉引导传感器分为安装固定支架上和安装在工业机器人上两种。安装在固定支架上:拍照式3D视觉引导传感器安装在专用的支架上,不随工业机器人移动。安装在工业机器人上:拍照式3D视觉引导传感器安装在工业机器人抓手或者工业机器人第六轴(以下简称六轴)上,随工业机器人移动。涉及抓手切换和多车型共用时,宜安装在六轴上,并需设计刚性满足要求的安装支架,以确保稳定性。安装方式如图4所示:安装在固定支架上b)安装在工业机器人图4安装方式系统组成系统组成见表1。系统组成序号组件项目内容1功能测量元素面、边、角、圆柱、圆孔、槽、特殊孔等2应用范围焊装车间各种类型、颜色的板材3拍照式3D视觉引导传感器拍照式4测量速度≤2s/工业机器人姿态5测量原理3D相机拍照6测量距离500~1000mm7视野范围≥100mm×100mm8重量≤3kg9系统综合引导精度≤±0.5mm10传感器安装方式安装在固定支架上或工业机器人上11控制上位机独立机柜控制拍照式3D视觉引导传感器12系统软件多车型画面切换功能支持,不少于5款13更改参数确认提示功能支持,以防误改参数14数据储存功能推荐存储时间不小于2年15示教功能可对测量系统进行示教,具有完整的测量算法应对车身上各个特征16监控功能具备对测量数据的监控功能,可实时监控被测工件的测量数据状态17分析功能具有MicrosoftEXCEL或WPS表格等类型的数据报告形式,帮助使用者进行数据分析,支持数据导出18用户多权限管理支持19支持语言中文、英文等20系统硬件柜体带冷凝水自蒸发式空调21显示器19吋彩色显示器22工控机处理器:i7以上内存:16GB以上硬盘容量:1TB以上网卡:100/1000bpsI/O接口:含DP、RS23223硬盘双硬盘RAID阵列,硬盘容量不小于1TB24网络接口主流工业通讯协议,如Profinet、Ethernet等25应急电源内置的后备电源(UPS)来防止突然掉电26输入电源要求AC220~230V,50/60Hz表1系统组成(续)序号组件项目内容27环境条件环境温度-5°~45℃28环境湿度10%~90%29照明条件无太阳光和弧焊光直射运行状态信息记录上位机在运行过程中,可自动生成日志,记录控制器运行状态信息,日志可用专用或通用工具调取。系统硬件及软件引导精度视觉引导系统应保证测定工作对象在抓取时不变形,综合引导精度≤±0.5mm。硬件传感器应安装保护罩盖,预防机械损伤。单个测量传感器的更换应在不重新标定整个工位的情况下,实现功能恢复。传感器在更换后的安装应在没有复杂辅助设备(激光跟踪仪、经纬测量仪)的情况下可以进行。应在不更换测量传感器的情况下可以更换其线缆和电控模块,同时不允许出现对整个工位的重新标定。固定式传感器应固定在一个可调的万向节头上,传感器的位置应在半紧固状态下可进行微调。传感器的首次校准过程和所采用的技术应进行详细描述并存档。软件应采用在汽车工业批量生产中已投入使用的操作软件。视觉引导软件包含测量控制软件和数据查询与分析软件,可实现引导状态实时监控,引导结果具备可视化界面,同时可对引导数据进行统计管理,并可导出固定格式的数据。所有系统设置,测量数据和关联数据应可以输出和存储(不是通过截屏),可以自由选择报告种类进行打印。应给出趋势信息,以防止超差(报警极限及干预极限)。操作人员应可以自由进行灵敏度的调节。实时数据显示:在一个测量循环完成后,显示被测点与理论值的偏差。测量点数据查询、分析和统计功能:测点误差在三个方向上的变化曲线或误差统计图,所有测量点的测量结果进行实时显示,按月或按年对测量点的合格率进行统计,并可输出统计图数据与图线输出。按班次、日、月或按年对测量点的合格率进行统计,并可输出统计图。系统参考清单以汽车白车身车身左、右侧围焊合件方案说明。左右侧围各一套独立的视觉系统,每个六轴支架上安装3个传感器,两个视觉工控机统一放置于一个控制柜内,共用一台显示器显示操作界面(支持切换),参考图3。智能视觉引导系统设备参考清单见表2。智能视觉引导系统设备清单序号设备名称数量单位使用规格备注1拍照式3D视觉引导传感器6个2控制柜工控机2个处理器:i7以上;内存:16GB以上;硬盘容量:1TB以上;网卡:100/1000Mbps;I/O接口:含DP、RS232。显示器1个19吋彩色显示器(含DP接口)适合在标准机柜内安装交换机2个支持Profinet、Ethernet总线进行通讯。柜体1个带冷凝水自蒸发式空调。满足使用,预制接头。UPS后备电源1套3电缆若干4系统软件1套支持两套系统切换监控,不支持配备两套。5传感器安装支架2套6其他必要组件技术参数智能视觉引导系统技术参数见表3。技术参数表序号组件项目内容1系统功能参数要求检测项目定位工作对象沿X、Y、Z方向位移和绕X、Y、Z转动共6个自由度。2应用范围汽车白车身焊装、总装车间不同工作对象抓件、放件。3拍照距离500~1000mm。4拍照范围700×700~1000×1000mm。5允许最大综合偏移量±70mm的位置偏移;±5°的工作对象偏转。6视觉引导综合精度优于±0.5mm。7系统拍照及处理时间≤2s。表3技术参数表(续)序号组件项目内容8拍照式3D视觉引导传感器传感器重复性/精度:±0.02mm/±0.05mm9相机与光源设计450nm蓝光光源10传感器保护片安装方式11系统软件支持语言中文、英文等12区域索引功能具备13实时数据储存功能具备,1个月以上14用户多权限管理支持15引导实时状态监控支持16引导结果可视化支持17引导数
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 母婴护理师师资婴儿玩具选择与使用
- 2026年常州市钟楼区网格员招聘考试备考题库及答案解析
- 2026年常州市钟楼区林业系统人员招聘考试参考试题及答案解析
- 2025年中小学高级教师职称答辩真题(附答案)
- 碳酸锂行业深度报告:供需双击碳酸锂新周期仍在途
- 2026潍坊眼科面试题及答案
- 2026年四川省凉山州中考英语试卷含详细答案解析
- 2026文旅文创面试题目及答案
- 2026武汉医疗岗位面试题目及答案
- 2026西藏考试面试题库及答案
- GA/T 2198-2024法庭科学可疑样品中毒品和易制毒化学品定性定量检验方法通用规则
- 郑州市金水区2025-2026学年第二学期三年级语文期末考试卷(部编版含答案)
- 2026年食品安全规章制度目录清单
- 物流公司业务部管理制度
- 铝屑收集储存安全管理制度(3篇)
- (正式版)DB33∕T 1224-2020 《城市轨道交通结构监测技术规程》
- 2025中考满分作文开头结尾集锦
- 北森测评题库及答案2026
- 2026年高考理科综合新高考一卷试题解析及答案
- 2025年危化品安全员资格证考试题库及答案
- 2025年少先队辅导员技能大赛考试测试题及参考答案(共四套)
评论
0/150
提交评论