



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
4.2.1GPS的组成4.2全球定位系统简介2/4/20231青海大学生物科学系牛海林GPS(GlobalPositioningSystem)即全球定位系统,是由美国建立的一个卫星导航
定位系统,利用该系统,用户可以在全球范围内实现全天候、连续、实时的三维导航定位和测速;另外,利用该系统,用户还能够进行高精度的时间传递和高精度的精密定位。
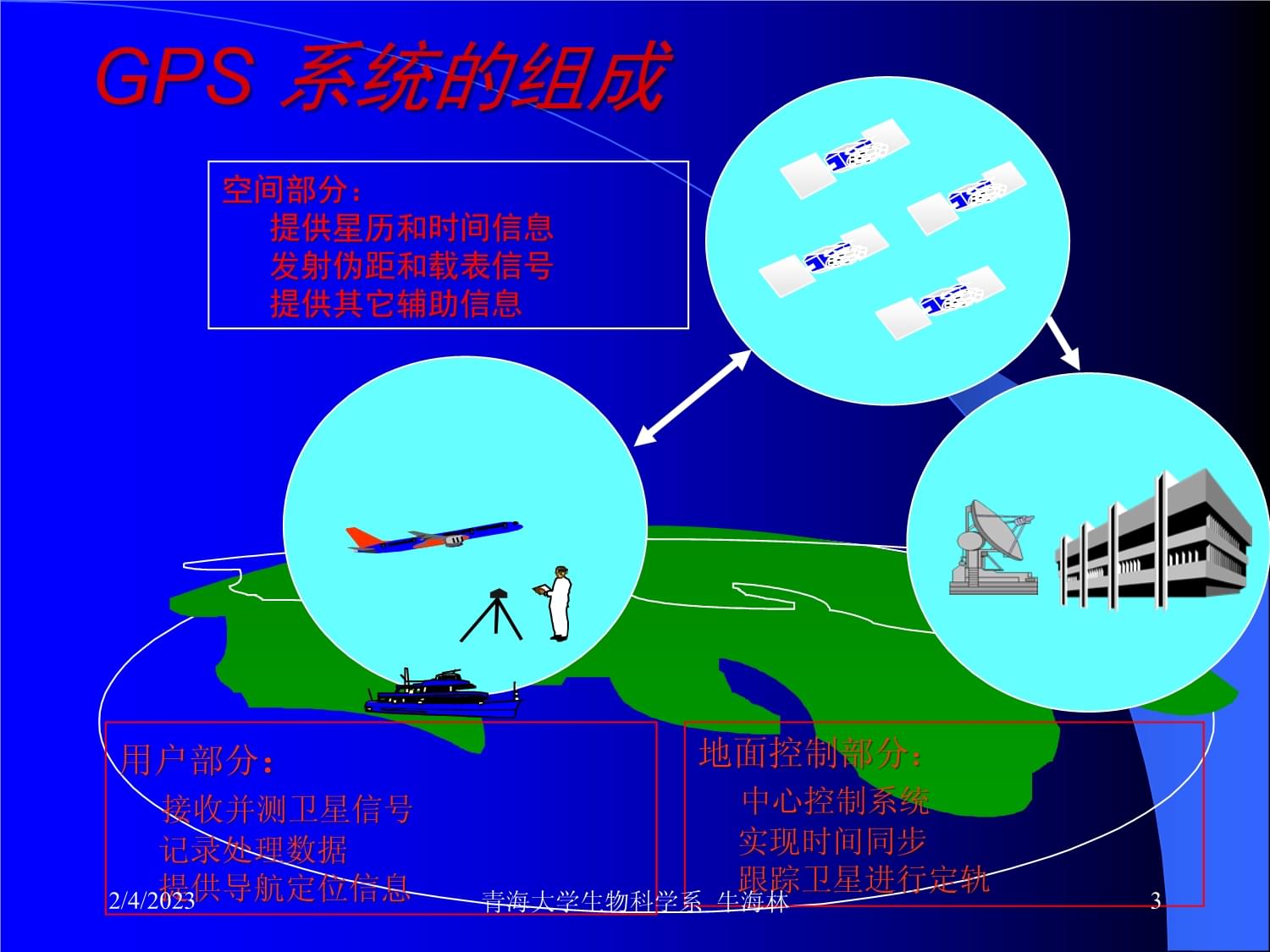
GPS计划始于1973年,已于1994年进入完全运行状态。GPS的整个系由空间部分、地面控制部分和用户部分所组成:2/4/20232青海大学生物科学系牛海林GPS系统的组成空间部分:提供星历和时间信息发射伪距和载表信号提供其它辅助信息地面控制部分:
中心控制系统实现时间同步跟踪卫星进行定轨用户部分:
接收并测卫星信号记录处理数据提供导航定位信息2/4/20233青海大学生物科学系牛海林空间部分24颗卫星(21+3)6个轨道平面55º轨道倾角20200km轨道高度(地面高度)12小时(恒星时)轨道周期5个多小时出现在地平线以上(每颗星)2/4/20234青海大学生物科学系牛海林地面控制部分一个主控站:科罗拉多•斯必灵司三个注入站:阿松森(Ascencion)
迭哥•伽西亚(DiegoGarcia)
卡瓦加兰(kwajalein)五个监测站=1个主控站+3个注入站+夏威夷(Hawaii)55HawaiiAscencionDiegoGarciakwajaleinColoradosprings2/4/20235青海大学生物科学系牛海林
用户部分
通用接收机(定位型):导航型接收机一般情况下无数据输出的记录存储设备天线前置放大器电源部分射电部分微处理器数据存器显示控制器供电信号信息命令数据供电,控制供电数据控制2/4/20236青海大学生物科学系牛海林4.2.2GPS信号2/4/20237青海大学生物科学系牛海林
GPS卫星信号
卫星信号结构每颗卫星都发射一系列无线电信号(基准频率ƒ)
两种载波(L1和L2)
两种码信号(C/A码和P码)一组导航电文(信息码,D码)基准频率10.23MHZ
L11575.42MHZ
C/A码
1.023MHZP•码
10.23MHZL21227.60MHZ15412050比特/S卫星信息电文(D码)2/4/20238青海大学生物科学系牛海林4.2.3定位原理2/4/20239青海大学生物科学系牛海林接收机对跟踪的每一颗卫星进行测距地心SiPijPj
riRjRj
=ri
+Pij有关各观测量及已知数据如下:r—为已知的卫地矢量P—为观测量(伪距)R—为未知的测站点位矢量对卫星进行测距2/4/202310青海大学生物科学系牛海林距离观测值的计算接收机至卫星的距离借助于卫星发射的码信号量测并计算得到的接收机本身按同一公式复制码信号比较本机码信号及到达的码信号确定传播延迟的时间t传播延迟时间乘以光速就是距离观测值=C•t卫星钟调制的码信号接收机时钟复制的码信号tt2/4/202311青海大学生物科学系牛海林单点定位结果的获取单点定位解可以理解为一个后方交会问题卫星充当轨道上运动的控制点,观测值为测站至卫星的伪距(由时延值推算得到)由于接收机时钟与卫星钟存在同步误差所以要同步观测4颗卫星,解算四个未知参数:精度
,经度
,高程h,钟差t2/4/202312青海大学生物科学系牛海林采用载波相位观测值发自卫星的电磁波信号:信号量测精度优于波长的1/100载波波长(L1=19cm,L2=24cm)比C/A码波长(C/A=293m)短得多所以,GPS测量采用载波相位观测值可以获得比伪距(C/A码或P码)定位高得多的成果精度L1载波L2载波C/A码P-码
p=29.3
m
L2=24
cm
L1=19c
m
C/A=293
m2/4/202313青海大学生物科学系牛海林
组成星际站际两次差分观测值可以消去卫星钟的系统偏差可以消去接收机时钟的误差PikPljPijPjPlkPkSlSi可以消去轨道(星历)误差的影响可以削弱大气折射对观测值的影响2/4/202314青海大学生物科学系牛海林解算出初始整周未知数测站对某一卫星的载波相位观测值由三部分组成(1)初始整周未知数n;(2)t0至ti时刻的整周记数Ci;(3)相位尾数i
如果信号没有失锁,则每一个观测值包含同一个初始整周未知数n
为了利用载波相位进行定位,必须先解算出初始整周未知数,取得总观
测值n+Ci+iTime(0)AmbiguityTime(i)AmbiguityCountedCyclesPhaseMeasurement2/4/202315青海大学生物科学系牛海林弄清楚初始整周未知数的确定与定位精度的关系
如果无法准确解出初始整周未知数,则定位精度难以优于±1m随着初始整周未知数解算精度的提高,定位精度也相应提高一旦初始整周未知数精确获得,定位精度不再随时间延长而提高经典静态定位需要30-80分钟观测才能求定初始整周未知数快速静态定位将这个过程缩短到2-5分钟m精度1.000.100.01整周未知数确定后整周未知数确定前00308025时间(分)经典静态定位快速静态定位2/4/202316青海大学生物科学系牛海林SPS和PPSGPS系统针对不同用户提供两种不同类型的服务。一种是标准定位服务(SPS–StandardPositioningService),另一种是精密定位服务(PPS–PrecisionPositioningService)。SPS主要面向全世界的民用用户。PPS主要面向美国及其盟国的军事部门以及民用的特许用户。2/4/202317青海大学生物科学系牛海林
GPS定位的误差源
1.与GPS卫星有关的因素
SA
美国政府从其国家利益出发,通过降低广播星历精度(技术)、在GPS基准信号中加入高频抖动(技术)等方法,人为降低普通用户利用GPS进行导航定位时的精度。卫星星历误差在进行GPS定位时,计算在某时刻GPS卫星位置所需的卫星轨道参数是通过各种类型的星历[7]提供的,但不论采用哪种类型的星历,所计算出的卫星位置都会与其真实位置有所差异,这就是所谓的星历误差。卫星钟差卫星钟差是GPS卫星上所安装的原子钟的钟面时与GPS标准时间之间的误差。卫星信号发射天线相位中心偏差卫星信号发射天线相位中心偏差是GPS卫星上信号发射天线的标称相位中心与其真实相位中心之间的差异。2/4/202318青海大学生物科学系牛海林电离层延迟由于地球周围的电离层对电磁波的折射效应,使得GPS信号的传播速度发生变化,这种变化称为电离层延迟。电磁波所受电离层折射的影响与电磁波的频率以及电磁波传播途径上电子总含量有关。对流层延迟由于地球周围的对流层对电磁波的折射效应,使得GPS信号的传播速度发生变化,这种变化称为对流层延迟。电磁波所受对流层折射的影响与电磁波传播途径上的温度、湿度和气压有关。多路径效应由于接收机周围环境的影响,使得接收机所接收到的卫星信号中还包含有各种反射和折射信号的影响,这就是所谓的多路径效应。2.与传播途径有关的因素2/4/202319青海大学生物科学系牛海林
接收机钟差接收机钟差是GPS接收机所使用的钟的钟面时与GPS标准时之间的差异。
接收机天线相位中心偏差接收机天线相位中心偏差是GPS接收机天线的标称相位中心与其真实的相位中心之间的差异。
接收机软件和硬件造成的误差在进行GPS定位时,定位结果还会受到诸如处理与控制软件和硬件等的影响。3.与接收机有关的因素2/4/202320青海大学生物科学系牛海林4.其它
GPS控制部分人为或计算机造成的影响由于GPS控制部分的问题或用户在进行数据处理时引入的误差等。数据处理软件的影响数据处理软件的算法不完善对定位结果的影响。2/4/202321青海大学生物科学系牛海林坐标系、基准和坐标系统测量的基本任务就是确定物体在空间中的位置、姿态及其运动轨迹。而对这些特征的描述都是建立在某一个特定的空间框架和时间框架之上的。所谓空间框架就是我们常说的坐标系统,而时间框架就是我们常说的时间系统。2/4/202322青海大学生物科学系牛海林坐标系统
一个完整的坐标系统是由坐标系和基准两方面要素所构成的。坐标系指的是描述空间位置的表达形式,而基准指的是为描述空间位置而定义的一系列点、线、面。在大地测量中的基准一般是指为确定点在空间中的位置,而采用的地球椭球或参考椭球的几何参数和物理参数,及其在空间的定位、定向方式,以及在描述空间位置时所采用的单位长度的定义。2/4/202323青海大学生物科学系牛海林坐标系的分类正如前面所提及的,所谓坐标系指的是描述空间位置的表达形式,即采用什么方法来表示空间位置。人们为了描述空间位置,采用了多种方法,从而也产生了不同的坐标系,如直角坐标系、极坐标系等。在测量中,常用的坐标系有以下几种:2/4/202324青海大学生物科学系牛海林空间直角坐标系空间直角坐标系的坐标系原点位于参考椭球的中心,Z轴指向参考椭球的北极,X轴指向起始子午面与赤道的交点,Y轴位于赤道面上,且按右手系与X轴呈90°夹角。某点在空间中的坐标可用该点在此坐标系的各个坐标轴上的投影来表示。2/4/202325青海大学生物科学系牛海林空间大地坐标系空间大地坐标系是采用大地经、纬度和大地高来描述空间位置的。纬度是空间的点与参考椭球面的法线与赤道面的夹角,经度是空间中的点与参考椭球的自转轴所在的面与参考椭球的起始子午面的夹角,大地高是空间点沿参考椭球的法线方向到参考椭球面的距离。2/4/202326青海大学生物科学系牛海林平面直角坐标系平面直角坐标系是利用投影变换,将空间坐标(空间直角坐标或空间大地坐标)通过某种数学变换映射到平面上,这种变换又称为投影变换。投影变换的方法有很,如UTM投影、Lambuda
投影等,在我国采用的是高斯-克吕格投影,也称为高斯投影。2/4/202327青海大学生物科学系牛海林基准所谓基准是指为描述空间位置而定义的点、线、面,在大地测量中,在大地测量中,基准是指用以描述地球形状的参考椭球的参数,如参考椭球的长短半轴,以及参考椭球在空间中的定位及定向,还有在描述这些位置时所采用的单位长度的定义。2/4/202328青海大学生物科学系牛海林GPS测量中常用的坐标系统
WGS-84坐标系是目前GPS所采用的坐标系统,GPS所发布的星历参数就是基于此坐标系统的。WGS-84坐标系的坐标原点位于地球的质心,Z轴指向BIH1984.0定义的协议地球极方向,X轴指向BIH1984.0的启始子午面和赤道的交点,Y轴与X轴和Z轴构成右手系。2/4/202329青海大学生物科学系牛海林1954年北京坐标系
1954年北京坐标系是我国目前广泛采用的大地测量坐标系,采用的参考椭球是克拉索夫斯基椭球,遗憾的是,该椭球并未依据当时我国的天文观测资料进行重新定位,而是由前苏联西伯利亚地区的一等锁,经我国的东北地区传算过来的,该坐标系的高程异常是以前苏联1955年大地水准面重新平差的结果为起算值,按我国天文水准路线推算出来的,而高程又是以1956年青岛验潮站的黄海平均海水面为基准。2/4/202330青海大学生物科学系牛海林克拉索夫斯基椭球参数同现代精确的椭球参数的差异较大,并且不包含表示地球物理特性的参数,因而给理论和实际工作带来了许多不便。
椭球定向不十分明确,椭球的短半轴既不指向国际通用的CIO极,也不指向目前我国使用的JYD极。参考椭球面与我国大地水准面呈西高东低的系统性倾斜,东部高程异常达60余米,最大达67米。
该坐标系统的大地点坐标是经过局部分区平差得到的,因此,全国的天文大地控制点实际上不能形成一个整体,区与区之间有较大的隙距,如在有的接合部中,同一点在不同区的坐标值相差1-2米,不同分区的尺度差异也很大,而且坐标传递是从东北到西北和西南,后一区是以前一区的最弱部作为坐标起算点,因而一等锁具有明显的坐标积累误差。1954年北京坐标系存在着很多缺点
2/4/202331青海大学生物科学系牛海林1980年西安大地坐标系
1978年,我国决定重新对全国天文大地网施行整体平差,并且建立新的国家大地坐标系统,整体平差在新大地坐标系统中进行,这个坐标系统就是1980年西安大地坐标系统。1980年西安大地坐标系统所采用的地球椭球参数的四个几何和物理参数采用了IAG1975年的推荐值,椭球的短轴平行于地球的自转轴(由地球质心指向1968.0JYD地极原点方向),起始子午面平行于格林尼治平均天文子午面,椭球面同似大地水准面在我国境内符合最好,高程系统以1956年黄海平均海水面为高程起算基准。2/4/202332青海大学生物科学系牛海林GPS静态定位在测量中的应用
GPS静态定位在测量中主要用于测定各种用途的控制点。其中,较为常见的方面是利用GPS建立各种类型和等级的控制网,在这些方面,GPS技术已基本上取代了常规的测量方法,成为了主要手段。较之于常规方法,GPS在布设控制网方面具有以下一些特点:2/4/202333青海大学生物科学系牛海林测量精度高:GPS观测的精度要明显高于一般的常规测量手段,GPS基线向量的相对精度一般在10-5~10-9之间,这是普通测量方法很难达到的。选点灵活、不需要造标、费用低:GPS测量不要求测站间相互通视,不需要建造觇标,作业成本低,大大降低了布网费用。全天侯作业:在任何时间、任何气候条件下,均可以进行GPS观测,大大方便了测量作业,有利于按时、高效地完成控制网的布设。观测时间短:采用GPS布设一般等级的控制网时,在每个测站上的观测时间一般在1~2个小时左右,采用快速静态定位的方法,观测时间更短。观测、处理自动化采用GPS布设控制网,观测工程和数据处理过程均是高度自动化的。2/4/202334青海大学生物科学系牛海林4.2.4布设GPS网的工作步骤
2/4/202335青海大学生物科学系牛海林测前工作项目的提出:一项GPS测量工程项目,往往是由工程发包方、上级主管部门或其他单位或部门提出,由GPS测量队伍具体实施。对于一项GPS测量工程项目,一般有如下一些要求:测区位置及其范围:测区的地理位置、范围,控制网的控制面积。用途和精度等级:控制网将用于何种目的,其精度要求是多少,要求达到何种等级。点位分布及点的数量:控制网的点位分布、点的数量及密度要求,是否有对点位分布有特殊要求的区域。提交成果的内容:用户需要提交哪些成果,所提交的坐标成果分别属于哪些坐标系,所提交的高程成果分别属于哪些高程系统,除了提交最终的结果外,是否还需要提交原始数据或中间数据等。2/4/202336青海大学生物科学系牛海林时限要求:对提交成果的时限要求,即何时是提交成果的最后期限。投资经费:对工程的经费投入数量。技术设计:负责GPS测量的单位在获得了测量任务后,需要根据项目要求和相关技术规范进行测量工程的技术设计。关于技术设计的具体内容将在第四章中作详细介绍。测绘资料的搜集与整理:在开始进行外业测量之前,现有测绘资料的搜集与整理也是一项极其重要的工作。需要收集整理的资料主要包括测区及周边地区可利用的已知点的相关资料(点志记、坐标等)和测区的地形图等。仪器的检验:对将用于测量的各种仪器包括GPS接收机及相关设备、气象仪器等进行检验,以确保它们能够正常工作。踏勘、选点埋石:在完成技术设计和测绘资料的搜集与整理后,需要根据技术设计的要求对测区进行踏勘,并进行选点埋石工作。2/4/202337青海大学生物科学系牛海林测量实施实地了解测区情况:由于在很多情况下,选点埋石和测量是分别由两个不同的队伍或两批不同的人员完成的,因此,当负责GPS测量作业的队伍到达测区后,需要先对测区的情况作一个详细的了解。主要需要了解的内容包括点位情况(点的位置、上点的难度等)、测区内经济发展状况、民风民俗、交通状况、测量人员生活安排等。这些对于今后测量工作的开展是非常重要的。卫星状况预:报根据测区的地理位置,以及最新的卫星星历,对卫星状况进行预报,作为选择合适的观测时间段的依据。所需预报的卫星状况有卫星的可见性、可供观测的卫星星座、随时间变化的PDOP值、随时间变化的RDOP值等。对于个别有较多或较大障碍物的测站,需要评估障碍物对GPS观测可能产生的不良影响。确定作业方案:根据卫星状况、测量作业的进展情况、以及测区的实际情况,确定出具体的作业方案,以作业指令的形式下达给各个作业小组,根据情况,作业指令可逐天下达,也可一次下达多天的指令。作业方案的内容包括作业小组的分组情况,GPS观测的时间段以及测站等。2/4/202338青海大学生物科学系牛海林外业观测:各GPS观测小组在得到作业指挥员所下达的作业指令后,应严格按照作业指令的要求进行外业观测。在进行外业观测时,外业观测人员除了严格按照作业规范、作业指令进行操作外,还要根据一些特殊情况,灵活地采取应对措施。在外业中常见的情况有不能按时开机、仪器故障和电源故障等。数据传输与转储:在一段外业观测结束后,应及时地将观测数据传输到计算机中,并根据要求进行备份,在数据传输时需要对照外业观测记录手簿,检查所输入的记录是否正确。数据传输与转储应根据条件,及时进行。基线处理与质量评估:对所获得的外业数据及时地进行处理,解算出基线向量,并对解算结果进行质量评估。作业指挥员需要根据基线解算情况作下一步GPS观测作业的安排。重复确定作业方案、外业观测、数据传输与转储与基线处理与质量评估四步,直至完成所有GPS观测工作。2/4/202339青海大学生物科学系牛海林测后工作结果分析(网平差处理与质量评估):,对外业观测所得到的基线向量进行质量检验,并对由合格的基线向量所构建成的GPS基线向量网进行平差解算,得出网中各点的坐标成果。如果需要利用GPS测定网中各点的正高或正常高,还需要进行高程拟合。技术总结:根据整个GPS网的布设及数据处理情况,进行全面的技术总结。成果验收2/4/202340青海大学生物科学系牛海林技术设计在布设GPS网时,技术设计是非常重要的。这是因为技术设计提供了布设GPS网的技术准则,在布设GPS网时所遇到的所有技术问题,都需要从技术设计中寻找答案。因此,在进行每一项GPS工程时,都必须首先进行技术设计。2/4/202341青海大学生物科学系牛海林技术设计的内容项目来源:介绍项目的来源、性质。测区概况:介绍测区的地理位置、气候、人文、经济发展状况、交通条件、通讯条件等。工程概况:介绍工程的目的、作用、要求、GPS网等级(精度)、完成时间等。技术依据:介绍作业所依据的测量规范、工程规范、行业标准等。2/4/202342青海大学生物科学系牛海林施测方案:介绍测量所采用的仪器、采取的布网方法等。作业要求:介绍外业观测时的具体操作规程、技术要求等,包括仪器参数的设置(如采样率、截止高度角等)、对中精度、整平精度、天线高的量测方法及精度要求等。观测质量控制:介绍外业观测的质量要求,包括质量控制方法及各项限差要求等。数据处理方案:详细的数据处理方案,包括基线解算和网平差处理所采用的软件和处理方法等内容。2/4/202343青海大学生物科学系牛海林布网方法国家测绘局1992年制订的我国第一部“GPS测量规范”将GPS的精度分为A—E五级(见下表)。其中A、B两级一般是国家GPS控制网。C、D、E三级是针对局部性GPS网规定的。2/4/202344青海大学生物科学系牛海林
应通过独立观测边构成闭合图形,以增加检核条件,提高网的可靠性。应尽量与原有地面控制网相重合,重合点一般不少于3个,且分布均匀。应考虑与水准点相重合,或在网中布设一定密度的水准联测点。点应设在视野开阔和容易到达的地方联测方向。可在网点附近布设一通视良好的方位点,以建立联测方向。根据GPS测量的不同用途,GPS网的独立观测边均应构成一定的几何图形,基本形式有:设计的一般原则2/4/202345青海大学生物科学系牛海林三角形网优点:图形几何结构强,具有良好的自检能力,经平差后网中相邻点间基线向量的精度均匀。缺点:观测工作量大。只有在网的精度和可靠性要求比较高时,才单独采用这种图形。2/4/202346青海大学生物科学系牛海林环形网优点:观测工作量较小,且具有较好的自检性和可靠性。缺点:非直接观测基线边(或间接边)精度较直接观测边低,相邻点间的基线精度分布不均匀。是大地测量和精密工程测量中普遍采用的图形。通常采用上述两种图形的混合图形。2/4/202347青海大学生物科学系牛海林星形网优点:观测中只需要两台GPS接收机,作业简单。缺点:几何图形简单,检验和发现粗差能力差,广泛用于工程测量、边界测量、地籍测量和碎部测量等。2/4/202348青海大学生物科学系牛海林GPS快速定位图形布设两台仪器作业的基本图形:多边形环状网。两接收机同步作业,交替迁站n-1次,得到首尾相接的n边形闭合环,每个新点均与两条独立基线相连。单基准形状网。两接收机同步作业,1台固定不动,1台快速流动迁站n-1次,得到n条独立基线,每个新点只与1条独立基线相连。因此每个点上必须进行第二次设站。123451234562/4/202349青海大学生物科学系牛海林1单基准星状网。1台固定不动,2台各快速流动迁站n-1次,得到2n条独立基线,每个新点只与1条独立基线相连。因此每个点上必须进行第二次设站。2双基准菱状网。2台固定不动,1台快速流动迁站n-1次,得到2n条独立快速定位基线。如果两基准站采用静态定位方式,可得到2n+1条独立基线向量。如果采用在流动站迁站期间两基准站多次快速定位得到多组快速定位基线向量的方法,最多可得到3n-1条独立基线向量。12345652341三台接收机作业的基本图形:2/4/202350青海大学生物科学系牛海林GPS基线解算
基线解算的过程实际上主要是一个平差的过程,平差所采用的观测值主要是双差观测值。在基线解算时,平差要分三个阶段进行,第一阶段进行初始平差,解算出整周未知数参数
的和基线向量的实数解(浮动解);在第二阶段,将整周未知数固定成整数;在第三阶段,将确定了的整周未知数作为已知值,仅将待定的测站坐标作为未知参数,再次进行平差解算,解求出基线向量的最终解-整数解(固定解)2/4/202351青海大学生物科学系牛海林GPS基线解算的过程
1.原始观测数据的读入在进行基线解算时,首先需要读取原始的GPS观测值数据。一般说来,各接收机厂商随接收机一起提供的数据处理软件都可以直接处理从接收机中传输出来的GPS原始观测值数据,而由第三方所开发的数据处理软件则不一定能对各接收机的原始观测数据进行处理,要处理这些数据,首先需要进行格式转换目前,最常用的格式是RINEX格式,对于按此种格式存储的数据,大部分的数据处理软件都能直接处理。2.外业输入数据的检查与修改在读入了GPS观测值数据后,就需要对观测数据进行必要的检查,检查的项目包括:测站名、点号、测站坐标、天线高等。对这些项目进行检查的目的,是为了避免外业操作时的误操作。2/4/202352青海大学生物科学系牛海林3.设定基线解算的控制参数基线解算的控制参数用以确定数据处理软件采用何种处理方法来进行基线解算,设定基线解算的控制参数是基线解算时的一个非常重要的环节,通过控制参数的设定,可以实现基线的精化处理。4.基线解算基线解算的过程一般是自动进行的,无需过多的人工干预。2/4/202353青海大学生物科学系牛海林5.基线质量的检验基线解算完毕后,基线结果并不能马上用于后续的处理,还必须对基线的质量进行检验,只有质量合格的基线才能用于后续的处理,如果不合格,则需要对基线进行重新解算或重新测量。基线的质量检验需要通过RATIO、RDOP、RMS、同步环闭和差、异步环闭和差和重复基线较差来进行。6.结束2/4/202354青海大学生物科学系牛海林GPS基线向量网平差GPS基线解算就是利用GPS观测值,通过数据处理,得到测站的坐标或测站间的基线向量值。我们在采用GPS观测完整个GPS网后,经过基线解算可以获得具有同步观测数据的测站间的基线向量,为了确定GPS网中各个点在某一坐标系统下的绝对坐标,需要提供位置基准、方位基准和尺度基准,而GPS基线向量只含有在WGS-84下的方位基准和尺度基准,而我们布设GPS网的主要目的是确定网中各个点在某一特定局部坐标系下的坐标,这就需要通过在平差时引入该坐标系下的起算数据来实现。当然,GPS基线向量网的平差,还可以消除GPS基线向量观测值和地面观测中由于各种类型的误差而引起的矛盾。根据平差所进行的坐标空间,可将GPS网平差分为三维平差和二维平差,根据平差时所采用的观测值和起算数据的数量和类型,可将平差分为无约束平差、约束平差和联合平差等。2/4/202355青海大学生物科学系牛海林高程拟合法所谓高程拟合法就是利用在范围不大的区域中,高程异常具有一定的几何相关性这一原理,采用数学方法,求解正高、正常高或高程异常。2/4/202356青海大学生物科学系牛海林技术总结的内容项目来源:介绍项目的来源、性质。测区概况:介绍测区的地理位置、气候、人文、经济发展状况、交通条件、通讯条件等。工程概况:介绍工程目的、作用、要求、等级、完成时间等。技术依据:介绍作业依据的测量规范、工程规范、行业标准等。施测方案:介绍测量所采用的仪器、采取的布网方法等。作业要求:介绍外业观测时的具体操作规程、技术要求等,包括仪器参数的设置(如采样率、截止高度角等)、对中精度、整平精度、天线高的量测方法及精度要求等。观测质量:控制介绍外业观测的质量要求,包括质量控制方法及各项限差要求等。数据处理方案:说明详细的数据处理方案,包括基线解算方法、网平差处理方法等。结论:对整个工程的质量及成果作出结论。2/4/202357青海大学生物科学系牛海林2/4/202358青海大学生物科学系牛海林五、GPS定位测量特点及前景一、GPS特点:
1、定位精度高应用实践已经证明,GPS相对定位精度在50KM以内可达10-6,100-500KM可达10-7,1000KM可达10-9。在300-1500m工程精密定位中,1小时以上观测的解其平面其平面位置误差小于1mm。
2、观测时间短随着GPS系统的不断完善,软件的不断更新,目前,20KM以内相对静态定位,仅需15-20分钟;快速静态相对定位测量时,当每个流动站与基准站相距在15KM以内时,流动站观测时间只需1-2分钟,然后可随时定位,每站观测只需几秒钟。
3、测站间无须通视
4、可提供三维坐标经典大地测量将平面与高程采用不同方法分别施测。GPS可同时精确测定测站点的三维坐标。目前GPS水准可满足四等水准测量的精度。2/4/202359青海大学生物科学系牛海林5、操作简便随着GPS接收机不断改进,自动化程度越来越高,有的已达“傻瓜化”的程度;接收机的体积越来越小,重量越来越轻,极大地减轻测量工作者的工作紧张程度和劳动强度。使野外工作变得轻松愉快。6、全天候作业目前GPS观测可在一天24小时内的任何时间进行,不受阴天黑夜、起雾刮风、下雨下雪等气候的影响。7、功能多、应用广
GPS系统不仅可用于测量、导航,还可用于测速、测时。测速的精度可达0。1M/S,测时的精度可达几十毫微秒。其应用领域不断扩大。2/4/202360青海大学生物科学系牛海林二、应用前景
1、GPS系统用途广泛
2、多元化空间资源环境的出现(GPS/GLONASS/GNSS)3、发展GPS产业
4、GPS的应用将进入人们的日常生活
有人说过,只有我们想不到的,没有GPS做不到的。GPS信号接收机在人们生活中的应用,是一个难以用数字预测的广阔天地,手表式的GPS接收机,将成为旅游者的忠实导游。尽管目前大多数人还不知道什麽是GPS,但有人预言,GPS将改变我们的生活方式。今后,所有运载器,都将依赖于GPS。GPS就象移动电话、传真机、计算机互联网对我们生活的影响一样,人们日常生活将离不开它。
2/4/202361青海大学生物科学系牛海林六、GPS技术应用一、GPS在大地控制测量中的应用时至今日,可以说GPS定位技术已完全取代了用常规测角、测距手段建立大地控制网。我们一般将应用GPS卫星定位技术建立的控制网叫GPS网。归纳起来大致可以将GPS网分为两大类:一类是全球或全国性的高精度GPS网,这类GPS网中相邻点的距离在数千公里至上万公里,其主要任务是做为全球高精度坐标框架或全国高精度坐标框架,为全球性地球动力学和空间科学方面的科学研究工作服务,或用以研究地区性的板块运动或地壳形变规律等问题。另一类是区域性的GPS网,包括城市或矿区GPS网,GPS工程网等,这类网中的相邻点间的距离为几公里至几十公里,其主要任务是直接为国民经济建设服务。2/4/202362青海大学生物科学系牛海林用常规的测图方法(如用经纬仪、测距仪等)通常是先布设控制网点,这种控制网一般是在国家高等级控制网点的基础上加密次级控制网点。最后依据加密的控制点和图根控制点,测定地物点和地形点在图上的位置并按照一定的规律和符号绘制成平面图。
GPS新技术的出现,可以高精度并快速地测定各级控制点的坐标。特别是应用RTK新技术,甚至可以不布设各级控制点,仅依据一定数量的基准控制点,便可以高精度并快速地测定界址点、地形点、地物点的坐标,利用测图软件可以在野外一次测绘成电子地图,然后通过计算机和绘图仪、打印机输出各种比例尺的图件。应用RTK技术进行定位时要求基准站接收机实时地把观测数据(如伪距或相位观测值)及已知数据(如基准站点坐标)实时传输给流动站GPS接收机,流动站快速求解整周模糊度,在观测到四颗卫星后,可以实时地求解出厘米级的流动站动态位置。这比GPS静态、快速静态定位需要事后进行处理来说,其定位效率会大大提高。故RTK技术一出现,其在测量中的应用立刻受到人们的重视和青睐。二、GPS在地形、地籍及房地产测量中的应用2/4/202363青海大学生物科学系牛海林七、GPS在其他领域中的应用军事领域2/4/202364青海大学生物科学系牛海林七、GPS在其他领域中的应用陆地运输导航2/4/202365青海大学生物科学系牛海林七、GPS在其他领域中的应用陆地运输导航2/4/202366青海大学生物科学系牛海林4.2.5GPS基本操作2/4/202367静态GPS接收机(南方9600北极星)2/4/202368青海大学生物科学系牛海林系统组成9600型GPS接收机包括硬件、软件两个部分:硬件:
a.9600接收机(内置天线及抑制多路径板);
b.9600单片机内置采集器(内置采集软件);
c.可充电电池及充电器;
d.铝或木三脚架;
e.数据传输电缆。软件:包括数据传输软件、GPS数据处理系统(包含基线向量处理、闭合差自动搜索、网平差、高程拟合以及图形输出等功能)。2/4/202369青海大学生物科学系牛海林9600型GPS测量系统采用静态相对定位模式。此时外业部分需两台或两台以上GPS接收机。数据经过处理可方便的进入CAD进行图形编辑,数据成果可导入Mapinfo等GIS系统。应用:土地管理部门、测量部门、海洋调查、水利水土保持、森林详情普查、地质调查、林业资源勘查、石油、地矿勘探等行业。2/4/202370青海大学生物科学系牛海林主要技术参数一、9600接收机:12个并行的独立通道、可同时接收12颗卫星L1载波相位、C/A码伪距,1575.42MHz扁平有源天线带内装式抑径板根据卫星高度及卫星运行的健康状况自动选择卫星flash闪存内存16M,可存储连续约20天数据量240160液晶显示屏两块高性能锂电池连续工作时间长达16小时之久二、静态相对定位精度:静态基线:±(5mm+1ppm)高程:±(10mm+2ppm)三、同步观测时间:45分钟左右2/4/202371青海大学生物科学系牛海林9600型GPS测量系统文件及操作一、开机初始界面:使用PWR键开机
初始界面中模式的选择指示灯含义F1F2F3F4PWR2/4/202372青海大学生物科学系牛海林二、系统界面选手动或智能模式后进入主界面F1F2F3F4PWR主界面分三大部分:卫星分布图、系统提示框、功能项2/4/202373青海大学生物科学系牛海林1、“文件”功能操作按F1键进入“文件”功能的操作F1F2F3F4PWRPWR键返回主界面2/4/202374青海大学生物科学系牛海林按F2键进入“设置”功能的操作2、“设置”功能操作F1F2F3F4PWR注意:同时工作的几台9600主机高度截止角、采集间隔最好保证一致,即同样的设置值。PWR键“取消”:返回主界面。2/4/202375青海大学生物科学系牛海林按F3键进入“测量”功能的操作3、“测量”功能操作F1F2F3F4PWR有状态、卫星、点名(采集)、返回、记录图标五个子项2/4/202376青海大学生物科学系牛海林F1键“状态”:F1F2F3F4PWR显示单点定位的经纬度坐标、高程和精度因子PDOP值、定位状态、锁定卫星数目、可视卫星数2/4/202377青海大学生物科学系牛海林F2键“卫星”:F1F2F3F4PWR2/4/202378青海大学生物科学系牛海林F3键“点名”:
F1F2F3F4PWR智能模式下显示点名。在人工模式下显示采集,此时用户可以输入测站的相关信息,如:测站点名、测站采集的时段号、测站天线高。2/4/202379青海大学生物科学系牛海林按F4键进入“系统”功能的操作4、“系统”功能的操作F1F2F3F4PWR长按PWR键关机2/4/202380青海大学生物科学系牛海林三.9600型文件系统野外数据采集打开主机电源后,初始界面有三种采集工作方式选择,用户可根据实际情况和方便性来选择不同的工作方式来采集数据,若不选择,则延时10秒后自动进入默认采集方式“智能模式”。注意:每一次只能用一种工作方式来采集数据。2/4/202381青海大学生物科学系牛海林1、智能模式采集(1)
数据的采集在初始界面下选F1键进入“智能模式”F1F2F3F4PWR2/4/202382青海大学生物科学系牛海林(2)
给记录的数据取一个文件名按F3键“测量”进入测量功能界面(可看到接收机状态,单点经纬度坐标,定位状态、精度因子)F1F2F3F4PWR2/4/202383青海大学生物科学系牛海林按F3键“点名”进入点名输入功能界面,给正在记录的数据起一个文件名、输入时段号及输入测站天线高。
F1F2F3F4PWR2/4/202384青海大学生物科学系牛海林(3)
退出数据记录退回到主界面,然后长按PWR键关机。在任何界面下同时按下F1+F4快捷键关机,即可退出采集,且不会丢失数据。注意:“智能模式”和“人工模式”的区别:人工模式先取文件名再记录采集数据;智能模式先已自动记录采集数据再取文件名。2/4/202385青海大学生物科学系牛海林(1)
数据的采集在9600主机电源打开后,在初始界面下选F2键进入“人工模式”2、
人工模式采集F1F2F3F4PWR2/4/202386青海大学生物科学系牛海林(2)
给记录的数据取一个文件名当满足条件时,请按下F3键“采集”进入文件名输入界面,输入完文件名、时段号、天线高后,按F4键“确定”,接收机就开始记录数据。
F1F2F3F4PWR4.2.3退出数据记录:操作同“智能模式”。2/4/202387青海大学生物科学系牛海林本方式操作最简单实用,完全“傻瓜式”操作,进入该方式后,你就可以去一边休息,等采集时间足够时就可收机搬站。(1)
数据的采集在9600主机电源打开后,在初始界面下选F3键进入“节电模式”。节电模式一进入之后就自动关闭液晶显示屏,仅靠指示灯来显示卫星状态和采集状态。3、节电模式采集2/4/202388青海大学生物科学系牛海林电源灯卫星灯信息灯A电池为绿灯B电池为黄灯A、B均不足,为红灯卫星灯和信息灯的工作情况:1.未进入3D状态时,信息灯每闪N次红灯,则卫星闪烁1次红灯
可视的卫星数2.进入3D状态时,信息灯每闪M次绿灯,则卫星闪烁1次绿灯
采集间隔2/4/202389青海大学生物科学系牛海林(2)退出数据记录在任何界面下同时按下F1+F
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 竹鞭墙纸施工方案(3篇)
- 福建麦当劳活动策划方案(3篇)
- 炒饭餐厅活动策划方案(3篇)
- 清淤上岸施工方案(3篇)
- 突起地标施工方案(3篇)
- 清远展厅施工方案(3篇)
- 阜阳涵管施工方案(3篇)
- 气象服务业务规范手册(标准版)
- 外墙涂料安全培训
- 2025年大学(食品科学与工程)食品营养学试题及答案
- 浙江开放大学信息时代的生产技术作业题库
- 防爆工具安全操作规程(4篇)
- 劲拓作业指导书
- 30以内加减法练习(每页100题A4纸)
- 社会实践-形考任务三-国开(CQ)-参考资料
- 卢氏县横涧壮沟铁矿矿山地质环境保护与土地复垦方案
- 医护人员形象礼仪培训
- 中国的“爱经”(一)-《天地阴阳交⊥欢大乐赋》
- 心房钠尿肽基因敲除小鼠的繁殖和鉴定
- 母婴护理职业道德课件
- 口腔颌面外科学(全)
评论
0/150
提交评论