



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
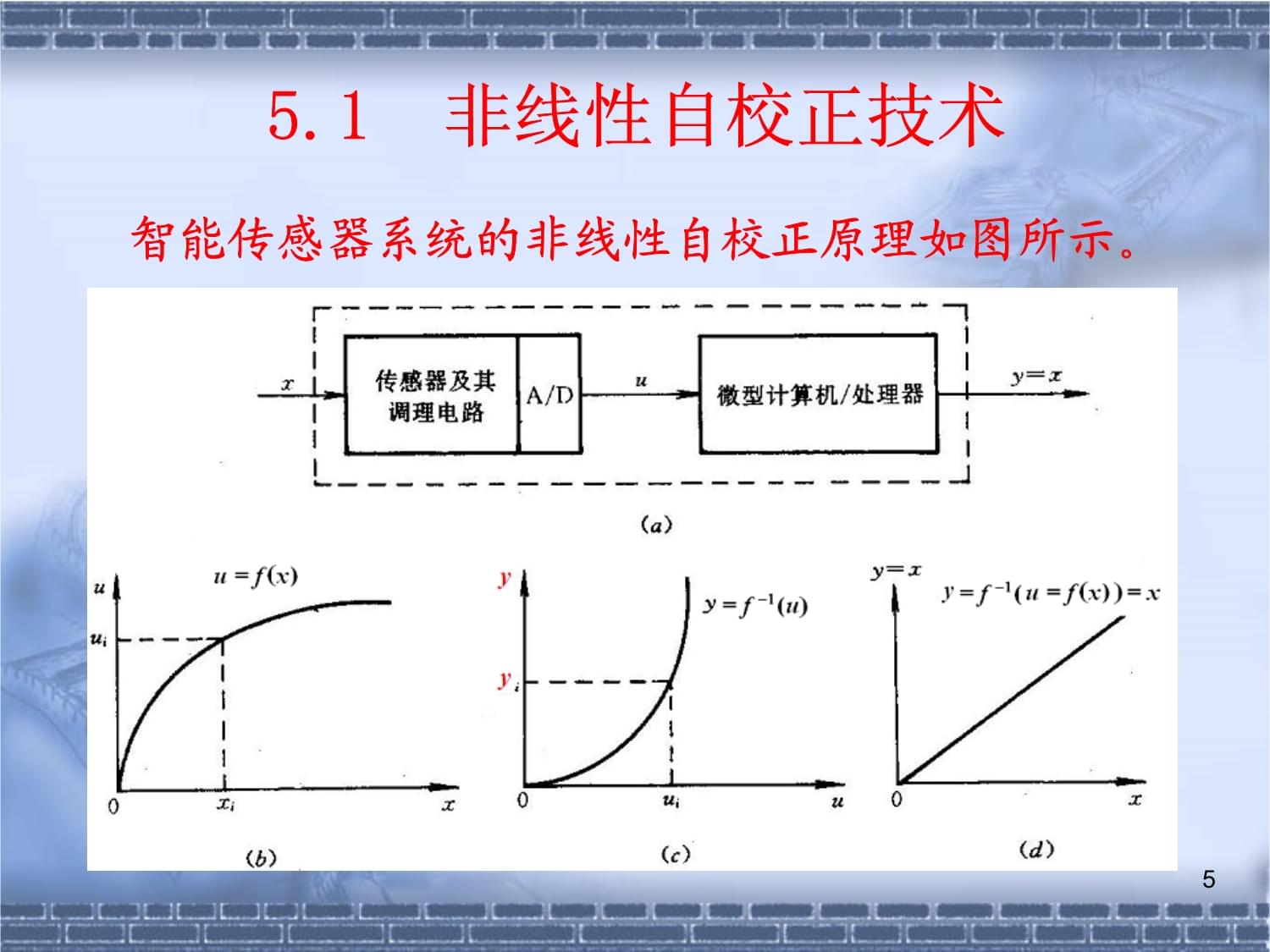
现代传感器技术第5章智能传感器系统智能化功能的实现方法(Ⅰ)1现代传感器技术第5章智能传感器系统智能化功能的实现方法(第5章智能传感器系统智能化功能的实现方法(Ⅰ)5.1非线性自校正技术5.2自校零与自校准技术5.3噪声抑制技术2第5章智能传感器系统智能化5.1非线性自校正技术25.1非线性自校正技术测量系统的线性度(非线性误差)是影响系统精度的重要指标之一。智能传感器系统具有非线性自动校正功能,可以消除整个传感器系统的非线性系统误差,提高测量精度。35.1非线性自校正技术测量系统的线性度(非线性误5.1非线性自校正技术与经典传感器技术不同的是,智能化非线性自动校正技术是通过软件来实现的。它不在乎测量系统中任一测量环节具有多么严重的非线性特性,也不需要再对改善测量系统中每一个测量环节的非线性特性而耗费精力,只要求它们的输入—输出特性具有重复性。45.1非线性自校正技术与经典传感器技术不同的是,5.1非线性自校正技术智能传感器系统的非线性自校正原理如图所示。55.1非线性自校正技术智能传感器系统的非线性自校正原理如5.1非线性自校正技术
1)传统的软件非线性校正方法。主要有反函数法、查表法、分段内插法、样条函数内插法和曲线拟合法。(1)反函数法。它是直接求出分度函数反函数的解析式,计算该函数求输入。一般只有函数很简单时才有实用意义。例如对热电阻的部分温区采用这种方法。65.1非线性自校正技术1)传统的软件非线性校正方5.1非线性自校正技术(2)查表法。它是将输入输出关系表存储在只读存储器中,使用时通过查表求得输入。为了节省存储器空间,可采用不同的表格压缩方法;为了提高查表速度,可采用各种快速查表算法。75.1非线性自校正技术(2)查表法。它是将输入输5.1非线性自校正技术(3)分段内插法。它是将传感器的输入输出关系曲线分成若干段,每段内使用线性或二次曲线内插。为了在指定精度条件下分段数最少,或在指定分段数条件下实现的误差最小,可采用各种优化分段方法。对温度传感器,国内市场上有专用的优化软件销售。85.1非线性自校正技术(3)分段内插法。它是将传5.1非线性自校正技术(4)样条函数内插法。它也是一种分段内插法,只是在分段点上不仅要求函数连续,还要求函数的一阶导数连续,因此往往采用三次曲线作为样条函数。(5)曲线拟合法。它是用最小二乘法来确定拟合函数的系数。当测量范围比较宽时,即便用曲线拟合法也是要分段的。虽然多项式是最常用的拟合函数,但也常用其他函数形式。95.1非线性自校正技术(4)样条函数内插法。它也5.1非线性自校正技术
2)非线性校正新方法。主要有遗传算法、神经网络方法和支持向量机方法。新方法主要用在传感器的特性函数未知时建立实用的函数或反函数关系。105.1非线性自校正技术2)非线性校正新方法。主要5.1非线性自校正技术(1)遗传算法。主要步骤如下①取得一组实验数据(q1,u1),(q2,u2),…,(qn,un)。②建立模型函数。常采用多项式形式作为反函数q=f-1(u)模型,同时给每一个系数确定数值范围。115.1非线性自校正技术(1)遗传算法。主要步骤如5.1非线性自校正技术③建立目标函数。常选误差平方和最小作为评估标准,如下式所示④确定编码方案。常采用二进制编码形式。通过编码形成的编码串将待处理数据表示成遗传空间的基因型结构数据;通过对编码串的运算求解模型函数系数的最佳值。125.1非线性自校正技术③建立目标函数。常选误差平5.1非线性自校正技术⑤生成初始群体,随机产生M个初始串群体。⑥转化适应值函数。适应值函数用于判别群体中个体的好坏。适应值函数F(x(i,k))通过对目标函数作简单变换得到,i是群体中的个体序号,k是遗传的代数。135.1非线性自校正技术⑤生成初始群体,随机产生M5.1非线性自校正技术⑦繁殖。繁殖是为了从当前群体中选取作为遗传父本的优良个体,按下式计算每个个体的繁殖概率,依此概率进行繁殖操作。145.1非线性自校正技术⑦繁殖。繁殖是为了从当前群5.1非线性自校正技术⑧杂交。在上一代的父本中,随机选取它们的编码串位(或片段)进行交换,产生新的个体。操作时要选择适当的杂交概率。如图所示为父辈1与父辈2通过在第6位的换位产生新的下一代。155.1非线性自校正技术⑧杂交。在上一代的父本中,5.1非线性自校正技术⑨变异。对上一代父本中的个体,随机选取它们的编码串位求反(0/1变换),产生新的个体。变异操作的概率一般选得较小。如图所示为对父辈第5位的求反操作产生的下一代。165.1非线性自校正技术⑨变异。对上一代父本中的个5.1非线性自校正技术⑩反复进行繁殖、杂交和变异三种遗传操作,直到满足事先选定的终止条件。由于遗传算法不利用模型函数的梯度信息,因此不会陷于局部最优,它的优点是可以寻求全局最优解。但由此产生的缺点是无法判断模型函数的收敛性。应用遗传算法时可以利用Matlab等工具。175.1非线性自校正技术⑩反复进行繁殖、杂交和变异5.1非线性自校正技术(2)神经网络方法。利用人工神经网络如函数链神经网络等,通过对样本数据的学习,来建立传感器的输入输出关系。(3)支持向量机方法。支持向量机方法是一种基于统计学习理论的模式识别方法,主要用于模式识别领域。它在文本分类、手写识别、图像分类、生物信息学等领域中获得了较好的应用。185.1非线性自校正技术(2)神经网络方法。利用人5.1非线性自校正技术例如,使用遗传算法对0℃以上时铂电阻阻值的经验公式系数进行拟合,即对中的A、B两个系数在0~300℃之间进行拟合。
试验得出的铂电阻的部分温度和阻值对应关系如下表所示。195.1非线性自校正技术例如,使用遗传算法对0℃5.1非线性自校正技术拟合结果如下
A=3.9680×10-3,B=-6.0000×10-7。205.1非线性自校正技术拟合结果如下205.1非线性自校正技术5.1.1查表法5.1.2曲线拟合法5.1.3函数链神经网络法215.1非线性自校正技术5.1.1查表法215.1.1查表法
查表法是一种分段线性插值法。根据精度要求对反非线性曲线进行分段,用若干段折线逼近曲线,将折点坐标值存入数据表中。测量时,首先由测量值确定应该选用哪一段,然后根据线性插值法求输出值。225.1.1查表法查表法是一种分段线性插值法。5.1.1查表法设反非线性特性曲线如图所示,下面以四段为例,折点坐标值为
横坐标:u1,u2,u3,u4,u5;
纵坐标:x1,x2,x3,x4,x5。各线性段的输出表达式为235.1.1查表法设反非线性特性曲线如图所示,5.1.1查表法245.1.1查表法245.1.1查表法输出y=x表达式的通式为式中,k为折点的序数,四条折线有五个折点,k=1,2,3,4。255.1.1查表法输出y=x表达式的通式为式中,k为5.1.1查表法
折线与折点的确定有两种方法,即D近似法与截线近似法。不论哪种方法所确定的折线段与折点坐标值都与所要逼近的曲线之间存在误差D,按照精度要求,各点误差Di都不得超过允许的最大误差界Dm,即Di≤Dm。265.1.1查表法折线与折点的确定有两种方法,5.1.1查表法
1、D近似法如图所示,折点不在曲线上,一般在折点处的误差最大,折点在±Dm误差界上。折线与逼近的曲线之间的误差最大值为Dm,且有正有负。275.1.1查表法1、D近似法275.1.1查表法
如图所示,在预定的误差界Dm内,在被逼近的函数f(x)附近作两个新的函数f(x)+Dm和f(x)-Dm,在这二者之间来回作穿越f(x)的最长折线。285.1.1查表法如图所示,在预定的误差界Dm
2、截线近似法
折点在曲线上且误差最小,这是利用标定值作为折点的坐标值。折线与被逼近的曲线之间的最大误差在折线段中部,应控制该误差值不大于允许的误差界Dm。折线段内误差符号一般相同,但各折线段之间一般不同。5.1.1查表法292、截线近似法5.1.1查表法295.1.2曲线拟合法这种方法是采用n次多项式来逼近反非线性曲线,该多项式方程的各个系数由最小二乘法确定。305.1.2曲线拟合法这种方法是采用n次多项式来逼一、列出逼近反非线性曲线的多项式方程5.1.2曲线拟合法(1)对传感器及调理电路进行静态实验标定,得校准曲线。标定点的数据为31一、列出逼近反非线性曲线的多项式方程5.1.2曲线拟合法n的数值由所要求的精度来定。若n=3,则
式中,a0、a1、a2、a3为待定常数。
5.1.2曲线拟合法(2)假设反非线性特性拟合方程为32n的数值由所要求的精度来定。若n=3,则式中,a0、a1、(3)求解待定常数a0、a1、a2、a3。最小二乘法的思想是误差的平方和最小。即5.1.2曲线拟合法33(3)求解待定常数a0、a1、a2、a3。最小二乘法
为了求得函数F(a0,a1,a2,a3)取最小值时的常数a0、a1、a2、a3,对函数求导并令它为零,即令5.1.2曲线拟合法34为了求得函数F(a0,a1,a2,a3)取最小值时的得5.1.2曲线拟合法35得5.1.2曲线拟合法35经整理后得方程组5.1.2曲线拟合法式中,N为实验标定点个数;其他各量如下36经整理后得方程组5.1.2曲线拟合法式中,N为实验标定5.1.2曲线拟合法
通过求解上面的方程组可得待定常数a0、a1、a2、a3如下375.1.2曲线拟合法通过求解上面的方程组可得待定5.1.2曲线拟合法385.1.2曲线拟合法38二、将所求得的常系数a0~a3存入内存将已知的反非线性特性拟合方程写成下面形式即可根据u求得输入被测值x。
这种方法的缺点是,当存在噪声时,可能遇到病态矩阵而使求解受阻。5.1.2曲线拟合法39二、将所求得的常系数a0~a3存入内存将已知的反非一、传感器及其调理电路的实验标定5.1.3函数链神经网络法由静态标定实验数据列出标定点的标定值为40一、传感器及其调理电路的实验标定5.1.3函数链神经网二、列出反非线性特性拟合方程5.1.3函数链神经网络法
反非线性特性拟合方程表示如下下面采用函数链神经网络法求上式中的待定常数a0~an。41二、列出反非线性特性拟合方程5.1.3函数链神经网络法函数链神经网络的一般结构如图所示。图中,Wj(j=0,1,…,n)为网络的连接权值。三、函数链神经网络5.1.3函数链神经网络法42函数链神经网络的一般结构如图所示。图中,Wj(j=0函数链神经网络的输出为5.1.3函数链神经网络法43函数链神经网络的输出为5.1.3函数链神经网络法轮流使用各组标定值,将第k步的估计输出xiest(k)与标定值xi进行比较,经神经网络学习算法不断调整权值Wj(k+1),直至估计误差的均方值足够小。5.1.3函数链神经网络法44轮流使用各组标定值,将第k步的估计输出xiest(k第k步的估计误差为5.1.3函数链神经网络法45第k步的估计误差为5.1.3函数链神经网络法45权值调节式为5.1.3函数链神经网络法式中,h为学习因子,其取值影响迭代的稳定性和收敛速度。46权值调节式为5.1.3函数链神经网络法式中,h为当权值趋于稳定时,所得权值即为多项式待定常数。5.1.3函数链神经网络法47当权值趋于稳定时,所得权值即为多项式待定常数。5.15.1.3函数链神经网络法
在进行学习之前,为了保证学习过程收敛,还应把ui归一化到[-1,1]区间上。即将ui除以umax,umax为ui的最大绝对值,或者稍大于最大绝对值的一个整数值。学习之后,还应该将Wj除以ujmax。在进行学习之前,还要为连接权值赋初值,它们的初始值可以取[-1,1]之间的随机数;或者人为地将W0与W1设为同一数量级,W2比W1低一个数量级,依此类推。485.1.3函数链神经网络法在进行学习之前,为了保
学习因子的选取也要合适。学习因子的选择影响到迭代稳定性和收敛速度。h大则收敛速度快,但稳定性不好;反之,h小则稳定性好,但收敛速度慢。为了兼顾两者,可将h取为变数,学习刚开始取一个较大的值,随着学习过程的深入逐渐减小。5.1.3函数链神经网络法49学习因子的选取也要合适。学习因子的选择影响到迭代稳定5.1.3函数链神经网络法四、函数链神经网络非线性校正应用实例
以铂电阻为例。铂电阻Pt100在0~200℃的标定值如表所示。505.1.3函数链神经网络法四、函数链神经网络非线性校正应5.1.3函数链神经网络法
以电阻值作为ui;温度值作为xi;umax取为整数200;取n=2;Wj的初始值为[-1,1]之间的随机数;学习因子取为1.2。515.1.3函数链神经网络法以电阻值作为ui;温度
然后按照上述方法,不断调整网络连接权值,得到的最终结果为
a0=-243.472173,a1=2.320811,a2=0.0011475.1.3函数链神经网络法52然后按照上述方法,不断调整网络连接权值,得到的最终结该铂电阻的反非线性函数为
由上式计算得到的温度值如表所示。由表可见,温度的计算值与标定值是非常接近的,最大相对误差不超过0.07%。5.1.3函数链神经网络法53该铂电阻的反非线性函数为由上式计算得到的温度5.2自校零与自校准技术假设一传感器系统经标定实验得到的静态输出y与输入x之间的关系如下式中,a0——零位值,即x=0时的输出值;
a1——灵敏度,又称传感器系统的转换增益。545.2自校零与自校准技术假设一传感器系
对于一个理想的传感器系统,a0与a1应为保持恒定不变的常量。但是实际上,由于各种内在和外来因素的影响,a0与a1都不可能保持恒定不变。譬如,决定放大器增益的外接电阻的阻值就会因温度变化而变化,因此就会引起放大器增益改变,从而使得传感器系统总增益改变,也就是系统总的灵敏度发生变化。5.2自校零与自校准技术55对于一个理想的传感器系统,a0与a1应为保持恒定不变式中,Da0——零位漂移;
Da1——灵敏度漂移。5.2自校零与自校准技术
设a1=S+Da1,其中S为增益的恒定部分,Da1为变化量;又设a0=P+Da0,P为零位值的恒定部分,Da0为变化量,则56式中,Da0——零位漂移;5.2自校零与自校准技术5.2自校零与自校准技术传统的传感器技术一直追求精心设计、精心制作、严格挑选高质量的材料及元器件,以期将Da1及Da0控制在某一限度内。但这是以高成本为代价的。智能传感器系统则另辟蹊径,它能够自动校正零位漂移和灵敏度漂移引入的误差。主要实现方法有三种。575.2自校零与自校准技术传统的传感器技术一直追5.2自校零与自校准技术5.2.1实现自校准功能的方法之一5.2.2实现自校准功能的方法之二5.2.3实现自校准功能的方法之三585.2自校零与自校准技术5.2.1实现自校准功能的5.2.1实现自校准功能的方法之一这种方法的原理框图如图所示。该实时自校环节不含传感器,其零点漂移和灵敏度漂移无法消除。标准发生器产生的UR、0与UX为同类属性。595.2.1实现自校准功能的方法之一这种方法的原自校准步骤如下①校零。输入信号为零点标准值,输出值为y0=a0;②标定。输入信号为标准值UR,输出值为yR;③测量。输入信号为传感器的输出UX,输出值为yX。5.2.1实现自校准功能的方法之一60自校准步骤如下5.2.1实现自校准功能的方法之一于是,可根据下式得到被校环节的增益a1被测信号UX则为这种方法是实时测量零点,实时标定灵敏度。5.2.1实现自校准功能的方法之一61于是,可根据下式得到被校环节的增益a1被测信号UX则5.2.1实现自校准功能的方法之一
对宽量程多挡多增益系统,一般对每挡增益都应实时进行自校。因此,标准发生器给出的标准值也应该有多个。多个标准值的建立有时不太经济,可以采用如图所示的斜率比动态校准法进行自校。625.2.1实现自校准功能的方法之一对宽量程多挡5.2.1实现自校准功能的方法之一
标准发生器产生三角波信号UR,被校增益环节G的输出信号yR可能为三角波或梯形波。增益值不同三角波或梯形波的斜率也将不同。测出输入与输出波形斜率比即可确定增益的数值。635.2.1实现自校准功能的方法之一标准发生器产将阈值电压比较器的下限比较电平置为-4.5V,上限比较电平置为+4.5V。输入到阈值电压比较器的电压在-4.5~+4.5V范围内时,阈值电压比较器输出UC为高电平,否则为低电平。5.2.1实现自校准功能的方法之一64将阈值电压比较器的下限比较电平置为-4.5
微处理器系统记录UC为高电平的起始与结束时刻。设标准信号UR从-4.5V升至+4.5V的时间间隔为(tR2-tR1),如图所示。5.2.1实现自校准功能的方法之一65微处理器系统记录UC为高电平的起始与结束时刻。设标准
再设被校环节输出信号yR从-4.5V升至+4.5V的时间间隔为(ty2-ty1),如图所示。5.2.1实现自校准功能的方法之一66再设被校环节输出信号yR从-4.5V升至+4.5则被校环节的增益G即为时间间隔比
5.2.1实现自校准功能的方法之一67则被校环节的增益G即为时间间隔比5.2.1实现自校准功5.2.2实现自校准功能的方法之二这种方法的原理框图如图所示,能实现包含传感器在内的自校。标准值xR、零点标准值x0与被测量x的属性相同。685.2.2实现自校准功能的方法之二这种方法的原例如输入压力传感器的被测目标参量是压力P=x,则标准发生器为压力发生器,其产生的标准压力PR=xR,若传感器测量的是相对大气压PB的压差(又称表压),那么零点标准值就是通大气x0=PB,多路转换器则是非电型的可传输流体介质的气动多路开关——扫描阈。同样,微处理器在每一特定的周期内发出指令,控制多路转换器执行校零、标定、测量三步测量法,可得全传感器系统的增益/灵敏度a1为5.2.2实现自校准功能的方法之二69例如输入压力传感器的被测目标参量是压力P=x,则标准被测目标参量x为式中,yX——被测目标参量x为输入量时的输出值;
yR——标准值xR为输入量时的输出值;
y0——零点标准值x0为输入量时的输出值。5.2.2实现自校准功能的方法之二70被测目标参量x为式中,yX——被测目标参量x为输入量时的输
整个传感器系统的精度由标准发生器产生的标准值的精度来决定。只要求被校系统的各环节如传感器、放大器、A/D转换器等在三步测量所需时间内保持短暂稳定。在三步测量所需时间间隔之前和之后产生的零点、灵敏度时漂、温漂都不会引入测量误差。因此,这种实时在线自校准功能可以采用低精度的传感器、放大器、A/D转换器等环节,达到高精度测量结果的目的。5.2.2实现自校准功能的方法之二71整个传感器系统的精度由标准发生器产生的标准值的精度来5.2.3实现自校准功能的方法之三上面所述实现自校准功能的两种方法都要求被校系统的输出—输入特性呈线性,这样仅需两个标准值(其中一个是零点标准值)就能完善地标定系统的增益/灵敏度。然而,对于输入—输出特性呈非线性的系统,只采用两个标准值的三步测量法来进行自校准则是不够完善的。此时,至少需要三个标定点。725.2.3实现自校准功能的方法之三上面所述实现5.2.3实现自校准功能的方法之三实施过程如下
①对传感器系统进行现场、在线、测量前的实时三点标定,即依次输入三个标准值,xR1、xR2、xR3,测得相应输出值yR1、yR2、yR3。
②列出反非线性特性拟合方程式(二阶多项式)如下735.2.3实现自校准功能的方法之三实5.2.3实现自校准功能的方法之三③由标定值求反非线性特性曲线拟合方程的系数C0、C1、C2。按照最小二乘法的方差最小原则,即根据函数求极小值的条件,令偏导数为零,即745.2.3实现自校准功能的方法之三③由得5.2.3实现自校准功能的方法之三整理后得矩阵方程75得5.2.3实现自校准功能的方法之三整理后得矩阵方程75.2.3实现自校准功能的方法之三式中,N=3为在线实时标定点个数;其他量如下765.2.3实现自校准功能的方法之三式中,N=3为在线实5.2.3实现自校准功能的方法之三
由标定值计算出P、Q、R、S、D、E、F后,解上面矩阵方程可得待定系数C0、C1、C2的表达式为775.2.3实现自校准功能的方法之三由标定值计算5.2.3实现自校准功能的方法之三
已知C0、C1、C2后,反非线性特性拟合方程即被确定,这时智能传感器系统可由转换开关转向测量状态,按式(5-22)求出x(y)即代表系统测出的输入待测目标参量x。因此,只要传感器系统在实时标定与测量期间保持输出—输入特性不变,传感器系统的测量精度就决定于实时标定的精度,其他任何时间特性的漂移带来的不稳定性都不会引入误差。785.2.3实现自校准功能的方法之三已知C0、C
实验证明,对一个零漂、温漂在100℃温度变化范围内总误差达±1%的压力传感器系统,采用满度值精度为±0.02%的标准压力值进行实时三点校准/标定,系统的短时精度可优于±0.1%FS。但是,这种实时校准/标定方法要求提供至少三个标准值的一套外围设备,这不是任一个待测目标参量都能方便地做到的事。目前已经成熟应用这种实时校准法的目标参量是压力。5.2.3实现自校准功能的方法之三79实验证明,对一个零漂、温漂在100℃温度变化范围内5.2.3实现自校准功能的方法之三
如图所示为780B(PCU)压力自校准系统原理示意图。805.2.3实现自校准功能的方法之三如图所示为75.2.3实现自校准功能的方法之三
图中EV1~EV5为电驱动阀门,由微处理器经控制线P1.1、P1.2、P1.3、P1.4、P1.5发出控制信号来控制气路是“通”还是“断”。815.2.3实现自校准功能的方法之三图中EV1~5.2.3实现自校准功能的方法之三
气动开关受气动控制压力P1、P2的控制。EV1接通时EV2断开,推动气动开关使压力传感器与校准管路接通,处于校准状态。825.2.3实现自校准功能的方法之三气动开关受气5.2.3实现自校准功能的方法之三此时有三个标准压力值PR1、PR2和PR3按顺序施加到被校传感器上。835.2.3实现自校准功能的方法之三此时有三个标5.2.3实现自校准功能的方法之三
校准结束后,EV2接通,EV1断开,推动气动开关使传感器回到测量状态。845.2.3实现自校准功能的方法之三校准结束后,5.2.3实现自校准功能的方法之三
R1、R2、R3是三个压力调节器,将它们事先调节到合适位置,则可得到三个不同数值的标准压力值PR1、PR2、PR3,由高精度压力传感器读出。855.2.3实现自校准功能的方法之三R1、R2、5.3噪声抑制技术
如果信号的频谱和噪声的频谱不重合,可以用滤波消除噪声;当信号的频谱和噪声的频谱重叠或者噪声的幅值比信号还大时,则需要采用其他噪声抑制方法,如相关技术、平均技术等来消除噪声。865.3噪声抑制技术如果信号的频谱和噪声的频谱不重5.3噪声抑制技术5.3.1滤波5.3.2相关5.3.3其他滤波技术875.3噪声抑制技术5.3.1滤波875.3.1滤波
如果信号的频谱和噪声的频谱不重合,可以使用的滤波器有①模拟滤波器,由硬件实现的连续时间系统;②数字滤波器,由软件实现的离散时间系统。885.3.1滤波如果信号的频谱和噪声的频谱5.3.1滤波数字滤波器主要指具体实现数字滤波器算法的软件。与模拟滤波器相比,数字滤波器主要具有以下优点(1)不须增加硬件设备,尤其是在多通道检测装置中,可共用滤波子程序,从而大大降低费用和成本。(2)系统的可靠性高,重复性好。895.3.1滤波数字滤波器主要指具体实现数5.3.1滤波(3)可构成极低频的低通滤波器,而模拟滤波器则很难做到。(4)传递函数的参数易于调整。(5)易于实现复杂的滤波性能,且具有良好的一致性。(6)不必考虑阻抗匹配的问题。905.3.1滤波(3)可构成极低频的低通滤一、数字滤波器的数学基础——Z变换简介对于如图所示的连续时间系统,它的输入与输出信号在时域中的关系由微分方程来描述。经拉氏变换,在频域或复频域中的关系则变为代数方程。5.3.1滤波91一、数字滤波器的数学基础——Z变换简介对于如图所示对于具有采样/保持的计算机系统,即离散时间系统,如图所示。因信号不是连续的,其输入与输出的关系不能再用微分方程描述。5.3.1滤波92对于具有采样/保持的计算机系统,即离散时间系统,如图采样时间间隔很小时,在时域中可近似由差分方程描述。经Z变换,在Z域中的关系也为代数方程。图中,W(z)称为离散时间系统的脉冲传递函数。5.3.1滤波93采样时间间隔很小时,在时域中可近似由差分方程描述。经当幅值上也被量化时,系统中含有A/D,则称含有A/D转换器的离散时间系统为数字滤波器。5.3.1滤波94当幅值上也被量化时,系统中含有A/D,则称含有A/D
1、数值序列x(nT)或x(n)的Z变换
对x(t)求Z变换,就是对t=0,T,2T,…,nT的离散时间点上的离散时间序列x(nT)求Z变换,记为X(z)。Z变换的定义式为其中z=ejwT,为复变量,故5.3.1滤波951、数值序列x(nT)或x(n)的Z变换其中z=ej
2、冲激响应序列gD(nT)对于如图所示的脉冲传递函数为GD(z)的离散时间系统,当输入为狄拉克函数d(n)即5.3.1滤波时,在Z域有如下关系962、冲激响应序列gD(nT)5.3.1滤5.3.1滤波因d(z)=1,故则它们的Z反变换,也就是时域中的时间序列有如下关系975.3.1滤波因d(z)=1,故则它们的Z反变换即离散时间系统的输出y(n)就是该系统特性GD(z)的Z反变换gD(n),称gD(n)为冲激响应序列。5.3.1滤波98即离散时间系统的输出y(n)就是该系统特性GD(z)的Z反变二、连续时间滤波器H(s)的离散时间等效滤波器GD(z)
幅值量化了的离散时间等效滤波器称为数字滤波器GD(z)。求图中H(s)的等效GD(z)的方法有多种,下面仅介绍三种方法。5.3.1滤波99二、连续时间滤波器H(s)的离散时间等效滤波器GD(z)5.3.1滤波
1、脉冲响应不变法(Z变换法)
用脉冲/冲激响应不变法求得等效离散数字滤波器GD(z),它的脉冲响应序列gD(nT)是连续滤波器在采样瞬时相应的脉冲/冲激响应h(t)的T倍,T为采样周期,即对上式进行Z变换后得1005.3.1滤波1、脉冲响应不变法(Z变换5.3.1滤波
【例】求连续滤波器H(s)的等效数字滤波器GD(z)。已知H(s)如下【解】对H(s)求拉普拉斯反变换,可得其冲激响应h(t)为1015.3.1滤波【例】求连续滤波器H(s)再对h(t)求Z变换,查表5-3得则由式(5-33)可知,H(s)的等效数字滤波器GD(z)为5.3.1滤波102再对h(t)求Z变换,查表5-3得则由式(5-33)可知,5.3.1滤波
2、后向差分法
这是一种数值积分法。以一阶系统为例进行说明。一阶系统的归一化微分方程为传递函数为
1035.3.1滤波2、后向差分法传递函数为将上面微分方程的等号两边从0到t进行积分,即5.3.1滤波若欲求解每个采样周期T时y(t)的值,可将t=kT代入上式,得104将上面微分方程的等号两边从0到t进行积分,即5.3.1同理,从0到t=(k-1)T进行积分,则有5.3.1滤波两式相减,得105同理,从0到t=(k-1)T进行积分,则有5.3.15.3.1滤波上式右侧两项在数值上可由各种方法进行积分。运用后向差分法积分就是由矩形面积近似曲线y(t)和x(t)下的面积,如下图所示。1065.3.1滤波上式右侧两项在数值上可由各5.3.1滤波1075.3.1滤波1075.3.1滤波则变为
对上式两边求Z变换,得1085.3.1滤波则变为对上式两边求Z变换,与传递函数W(s)相比可知,采用后向差分法求等效数字滤波器GD(z)时,只需令即可。整理后得5.3.1滤波109与传递函数W(s)相比可知,采用后向差分法求等效数字5.3.1滤波
3、双线性变换法(梯形积分法或Tustin变换法)式(5-36)右侧积分,运用双线性变换法就是由梯形面积近似曲线下的面积,如图所示。1105.3.1滤波3、双线性变换法(梯形积分5.3.1滤波即于是,式(5-36)变为1115.3.1滤波即于是,式(5-36)变为111上式的Z变换为5.3.1滤波112上式的Z变换为5.3.1滤波112整理后得即可。与传递函数比较可知,用双线性变换法求模拟滤波器W(s)的等效数字滤波器GD(z)时,只需令5.3.1滤波113整理后得即可。与传递函数比较可知,用双线性变换法求模拟滤波5.3.1滤波4、频率预曲折双线性变换法讨论下式给出的连续滤波器G(s)由双线性变换法可得G(s)的等效数字滤波器GD(z)为1145.3.1滤波4、频率预曲折双线性变换法
5.3.1滤波
1)检查G(s)的频率响应G(jw)与GD(z)的频率响应GD(ejwt)。为了进行比较,先令s=jwA,再将z=ejwDT代入s中,于是可得1155.3.1滤波1)检查G(s)的频率响5.3.1滤波由此可得上式给出的在s域中的wA与z域中的wD之间的关系为①当wD<<p/T时,wA≈wD。因此离散滤波器GD(ejwt)与连续滤波器G(jw)特性近似相同。1165.3.1滤波由此可得上式给出的在s域中的wA与5.3.1滤波②当wD=p/T时,频率畸变大得惊人!因为
如图所示,曲线a表示G(jw)=10/(jw+10)的波德图,曲线b表示由双线性变换法所得GD(z)的波德图。1175.3.1滤波②当wD=p/T时,频率畸5.3.1滤波
2)频率预曲折
为了在较宽的范围使G(jwA)与GD(ejwDT)有近似的频率特性,在把G(s)变到z域之前,先使频率刻度曲折。也就是把转折频率wt=1/t=a调整到z域中所希望的新数值wD,即用取代a。1185.3.1滤波2)频率预曲折1185.3.1滤波即可。
于是,由频率预曲折双线性变换法确定G(s)的等效数字滤波器GD(z)的措施是:令取代G(s)中的a,且令1195.3.1滤波即可。于是,由频率预曲折双5.3.1滤波如低通滤波器1205.3.1滤波如低通滤波器120高通滤波器5.3.1滤波121高通滤波器5.3.1滤波1215.3.1滤波【例】试证明与式(5-41)给出的在w=a处有相同的幅频特性,即1225.3.1滤波【例】试证明
【证明】在w=a处,G(s)的频率特性G(jw)的幅值为因为z=ejwT,GD(z)的频率特性为5.3.1滤波123【证明】在w=a处,G(s)的频率特性G(jw)的幅在w=a处,GD(z)的幅值为5.3.1滤波可见,在w=a处,G(s)与GD(z)的幅值相同。如下图所示。124在w=a处,GD(z)的幅值为5.3.1滤波可5.3.1滤波
图中,曲线a表示G(jw)=10/(jw+10)的波德图,曲线b表示由双线性变换法所得GD(z)的波德图,曲线c表示由频率预曲折双线性变换法所得GD(z)的波德图。1255.3.1滤波图中,曲线a表示G(jw)5.3.1滤波三、数字滤波器设计应用举例【例一】设计一个低通滤波器,使它的频域响应特性与下面的模拟滤波器相同即要求所设计的数字滤波器GD(z)在wD=a=10
rad/s处的幅值为-3dB。设已知采样周期T=0.2s。1265.3.1滤波三、数字滤波器设计应用举例5.3.1滤波【解】采用频率预曲折双线性变换法。设计步骤如下①令可得双线性变换法的等效数字滤波器GD(z)为1275.3.1滤波【解】采用频率预曲折双线性5.3.1滤波
②频率预曲折。用取代上式中的a,即1285.3.1滤波②频率预曲折。用再将a=10rad/s与T=0.2s代入上式,得5.3.1滤波③求差分方程。因为
129再将a=10rad/s与T=0.2s代入上式,得5.5.3.1滤波所以整理后得1305.3.1滤波所以整理后得1305.3.1滤波对上式求反Z变换得于是1315.3.1滤波对上式求反Z变换得于是1315.3.1滤波
【例二】采用后向差分法求低通滤波器H(s)的等效数字滤波器H(z)
【解】①等效数字滤波器H(z)的编程实现。令a=1/t,则1325.3.1滤波【例二】采用后向差分法求低
再令s=(1-z-1)/T,T为采样间隔,得等效数字滤波器5.3.1滤波经整理后有133再令s=(1-z-1)/T,T为采样间隔,得等效数字故对上式求Z反变换,得差分方程如下5.3.1滤波于是134故对上式求Z反变换,得差分方程如下5.3.1滤即式中但q+p=1,即其和为1。5.3.1滤波135即式中但q+p=1,即其和为1。5.3.1滤5.3.1滤波
②低通滤波器转折角频率wt=a=1/t的调节。通过调整p、q的值可以方便地改变低通滤波器的时间常数t,从而可以调节低通滤波器的转折角频率wt。
若令1365.3.1滤波②低通滤波器转折角频率wt则可解得如果希望时间常数t值减小,以使系统动态响应更快,则可加大q值并减小p值,可再令5.3.1滤波解得时间常数t为137则可解得如果希望时间常数t值减小,以使系统动态响应可见,t值大大减小。由此例可见,在智能传感器系统中采用软件实现的数字滤波器调整起来非常方便。在信号缓变的流量、压力、温度测量的智能传感器系统中,常用式(5-46)所表征的低通数字滤波器来滤除高频噪声。5.3.1滤波138可见,t值大大减小。5.3.1滤波1385.3.1滤波
【例三】求模拟滤波器H(s)的等效数字滤波器GD(z)
【解】采用后向差分法,其步骤如下
①将H(s)整理为标准形式1395.3.1滤波【例三】求模拟滤波器H(s式中,5.3.1滤波
②令则得等效数字滤波器为
140式中,5.3.1滤波②令故有5.3.1滤波③对上式求Z反变换,得差分方程141故有5.3.1滤波③对上式求Z反变换,得差分因而5.3.1滤波
上式即为采用后向差分法实现H(s)的等效数字滤波器H'(z)=Y(z)/X(z)的编程算式。放大A倍即为H(z)=AH'(z)。142因而5.3.1滤波上式即为采用后向差分5.3.1滤波
【例四】求数字式PID控制器的脉冲传递函数。
【解】广义地说,控制器也是一种滤波器,故本问题也是求与模拟PID控制器等效的数字式PID。由此,智能传感器系统可以方便地具有控制功能。1435.3.1滤波【例四】求数字式PID控制
①模拟PID控制器的控制作用。通过三种控制作用的适当配合来控制一个变量。这三种控制作用是
a.比例控制——控制作用与偏差信号e(t)成比例;
b.积分控制——控制作用与偏差信号e(t)的积分成比例;
c.微分控制——控制作用与偏差信号e(t)的微分成比例。5.3.1滤波144①模拟PID控制器的控制作用。通过三种控制作用的适当5.3.1滤波控制作用的数学表达式如下式中,e(t)——控制器的输入信号(偏差信号);
m(t)——控制器的输出信号(控制信号);
K——比例增益;
Ti——积分时间;
Td——微分时间。1455.3.1滤波控制作用的数学表达式如下式中,e(
模拟PID控制器的原理框图如图所示。其传递函数为5.3.1滤波146模拟PID控制器的原理框图如图所示。其传递函数为5.
②若采用后向差分法,即令则得等效数字滤波器为
5.3.1滤波式中,KP=K——比例增益;
KI=KT/Ti——积分增益;
KD=KTd/T——微分增益。147②若采用后向差分法,即令则得5.3.1滤波
书上相当于对积分采用双线性变换法,对微分采用后向差分法,即1485.3.1滤波书上相当于对积分采用双线性5.3.1滤波由于所以1495.3.1滤波由于所以1495.3.1滤波差别在于,前面KP=K,而此时
④数字式PID控制器GD(z)的计算机编程算式。由式(5-52a)1505.3.1滤波差别在于,前面KP=K,而此时对上式进行Z反变换,有故5.3.1滤波151对上式进行Z反变换,有故5.3.1滤波1515.3.2相关随机信号是一种不确定性信号,即信号波形的变化不存在任何确定的规律,因而无法准确预测其未来值。随机信号具有两个基本特点①在所定义的观察区间是以时间t作为参变量的随机函数;②其随机性表现在信号的取值在事前不可精确地预测,在重复观察时又不是或不能肯定是重复地出现。1525.3.2相关随机信号是一种不确定性信号5.3.2相关几种随机信号如图所示。1535.3.2相关几种随机信号如图所示。1535.3.2相关在自然界中,经常会遇到这样一类随机过程,它们的特征是,产生随机现象的主要因素不随时间推移而改变。例如,恒温条件下热噪声电压X(t)是由于电路中电子的热运动引起的,这种热运动不随时间推移而改变。由于产生随机现象的主要因素不随时间推移而改变,因此,这类随机过程的统计特性也不随时间的推移而改变。1545.3.2相关在自然界中,经常会遇到这样
在相同条件下,对同一个随机信号x(t)进行多次重复观测记录,如图中的x1(t),…,xi-1(t),xi(t)。5.3.2相关一、随机信号的各种均值155在相同条件下,对同一个随机信号x(t)进行多次重复观
它的每一次的观测记录xi(t)被称为一个样本函数,称各次观测记录的整体{x(t)}={x1(t),…,xi-1(t),xi(t)}为样本集合。5.3.2相关156它的每一次的观测记录xi(t)被称为一个样本函数,称5.3.2相关对于实际工程中的信号,大多是随机信号。它们是平稳的随机过程,即某一时刻t1的总体平均值等于任一时刻tm的总体平均值,而且还是各态历经的,即等于任一样本的时间平均值,即它们的统计平均值不随时间而变化。其数学表述如下1575.3.2相关对于实际工程中的信号,大多某一时刻t1的总体平均值任一时刻tm的总体平均值任一样本的时间平均值5.3.2相关158某一时刻t1的任一时刻tm的任一样本的5.3.2相5.3.2相关由此可见,一个平稳随机过程其随机变量的概率密度函数不随时间坐标的变化(平移)而改变,换句话说其数字特征与所选的时间起点无关。在实际中这就意味着过程的统计特性在相当长的时间内不会改变,亦即现在所观测到的统计特性与过去或将来所观测到的结果是一致的。1595.3.2相关由此可见,一个平稳随机过程5.3.2相关
1.平均值
式(5-53)表示信号的直流分量,又称恒定分量,记为m或E[x(t)]。实际上记录时间T不可能无限长,只能在有限时间内求估计值,记为
。1605.3.2相关1.平均值1605.3.2相关
2.均方值
式(5-54)表示信号的强度,记为y2或E[x2(t)]。同理,只能在有限时间T内求得均方值的估计值,记为
。1615.3.2相关2.均方值161
5.3.2相关
3、方差方差用来描述随机信号的波动分量,记为s2。故方差s2,均方值y2与平均值m有如下关系1625.3.2相关3、方差故方差s2,5.3.2相关平均值与方差描述的只是随机信号在各个时刻的统计特性,而不能反映出在不同时刻各数值之间的内在联系,例如x(t)过去值、现在值与将来值之间或两个随机信号x(t)与y(t)数值之间的关联程度如何等等。1635.3.2相关平均值与方差描述的只是随机5.3.2相关如图所示,两个随机信号虽然具有近似相同的平均值与方差,但它们之间的变化规律却有着很大的差别。1645.3.2相关如图所示,两个随机信号虽然5.3.2相关
x(t)各样本随时间变化缓慢,在不同时刻的取值关系密切,相关性强,y(t)各样本随时问变化剧烈,在不同时刻的取值关系松散,相关性弱。1655.3.2相关x(t)各样本随时间变化缓5.3.2相关
4、自相关函数式(5-55)描述的是随机信号在时间间隔为t的任意两个时刻t与(t+t)的取值x(t)与x(t+t)的相关性,记为Rx(t)或E[x(t)x(t+t)]。当记录时间T不为∞时,求得的是估计值,记为。1665.3.2相关4、自相关函数166二、相关函数的定义式5.3.2相关
1、自相关函数Rx(t)信号x(t)的自相关函数定义式如下它描述一个随机过程在相隔t的两个不同时刻取值的相关程度。167二、相关函数的定义式5.3.2相关1、自5.3.2相关
2、互相关函数两个信号x(t)、y(t)的互相关函数Rxy(t)的定义式如下它描述了两个不同的随机过程在相隔t的两个不同时刻取值的相关程度。1685.3.2相关2、互相关函数它描5.3.2相关三、自相关函数的性质与特点
1、自相关函数的性质(1)自相关函数是偶函数,即证明:因为1695.3.2相关三、自相关函数的性质与特点令t-t=t',则t=t'+t,代入上式,得可知Rx(t)的波形以t为横轴,以t=0处的纵坐标呈对称形。5.3.2相关170令t-t=t',则t=t'+t,代入上式,得可知Rx(t)5.3.2相关(2)t=0时的自相关值Rx(0)是自相关函数Rx(t)的最大值,且等于均方值y2。证明:根据自相关函数定义及均方值y2的定义式有由式(5-58)得知1715.3.2相关(2)t=0时的自相关值R5.3.2相关为了证明自相关函数Rx(t)的最大值在t=0处,需要证明因为已知两个量的差的平方必为正数,对于一样本集合有下式成立1725.3.2相关为了证明自相关函数Rx(t因为各态历经的平稳随机过程统计平均值与时间无关,故由5.3.2相关得173因为各态历经的平稳随机过程统计平均值与时间无关,故由5.3.而故
将(5-64)与(5-65)式代入(5-63)式中,则有
5.3.2相关174而故将(5-64)与(5-65)式代入(5-63)式中,5.3.2相关(3)平稳随机过程的自相关函数Rx(t)不反映相位信息,只与两个时刻的时间延迟间隔t有关。(4)在t=∞处的自相关函数值为自相关函数的最小值,且等于平均值的平方,即1755.3.2相关(3)平稳随机过程的自相关5.3.2相关可以认为,t→∞时随机变量不相关。这表现为:x(t)与x(t+t)的数值相对于它们的平均值有大有小,符号有正有负,如图所示。证明:根据定义,有1765.3.2相关可以认为,t→∞时随机变量不相关。5.3.2相关当样本数目N足够大时,x(t)与x(t+t)取值的坐标点相对均值mx、m'x呈对称分布。证明:根据定义,有1775.3.2相关当样本数目N足够大时,x(t)与x5.3.2相关因为将x(t)、x(t+t)用平均值m与差值D或D'来表示。在图中,以取对称的四个坐标点为例,说明如下1785.3.2相关因为将x(t)、x(t+t)用平均5.3.2相关
xi(t)
xi(t+t)
xi(t)xi(t+t)点1m+D
m+D'
m2+m(D+D')+DD'点2 m-D
m+D'
m2-m(D-D')-DD'点3 m-D
m-D'
m2-m(D+D')+DD'点4 m+D
m-D'
m2+m(D-D')-DD'
将该四个对称点坐标值之积相加,并平均,则得
1795.3.2相关xi故N足够大时,图中的坐标点均相对平均值mx,m'x对称分布,因此当t→∞时,样本总体有5.3.2相关且为最小值。180故N足够大时,图中的坐标点均相对平均值mx,m'x对称分布5.3.2相关
2、自相关函数的特点(1)确定性信号在所有t值,包括t→∞,都有自相关函数值不为平均值m2的数值存在,即Rx(t→∞)≠m2,而随机信号在很小的t值,其自相关函数就降到平均值m2。1815.3.2相关2、自相关函数的特点181(2)若确定性信号x(t)是周期信号,则它的自相关函数Rx(t)也是周期函数,其周期与信号x(t)的周期相同。如图所示为周期方波x(t)的自相关函数。该方波幅值为a,周期为TP。5.3.2相关182(2)若确定性信号x(t)是周期信号,则它的自相关函5.3.2相关
周期为T=2p/w的正弦波x(t)=Asin(wt+f)的自相关函数如下。波形图如图所示。上式表明,正弦波的自相关函数是与初位相无关的余弦函数,其周期与正弦波的相同。
典型波形的自相关函数如下图所示。1835.3.2相关周期为T=2p/w的正弦波5.3.2相关1845.3.2相关1845.3.2相关1855.3.2相关1855.3.2相关
3、自相关函数的应用
利用自相关函数有利于检测和识别淹没在随机噪声中的周期信号。
例如求正弦波加随机噪声的自相关函数Rx(t)。设输入信号为式中,x0(t)——正弦波信号;
N(t)——干扰噪声。1865.3.2相关3、自相关函数的应用式中,5.3.2相关x(t)的自相关函数Rx(t)为注意,干扰噪声和正弦信号不相关,所以第2、3项积分为零。1875.3.2相关x(t)的自相关函数Rx(t)为注5.3.2相关上式可写为所以,正弦波加干扰噪声的自相关函数等于正弦波的自相关函数和噪声的自相关函数之和。1885.3.2相关上式可写为所以,正弦波加干扰噪声的5.3.2相关
例如,若X1(t)的自相关函数如图所示,则可以知到X1(t)中含有周期为T1的正弦信号,均方值为y12=Rx1(0),有直流分量,因m≠0。1895.3.2相关例如,若X1(t)的自相关5.3.2相关
又如,X2(t)的自相关函数如图所示。可知X2(t)中含有周期T2的正弦信号,均方值为y22=Rx2(0),没有直流分量,因m=0。1905.3.2相关又如,X2(t)的自相关函5.3.2相关因Rx2(t)随t的增加而衰减的速率较Rx1(t)慢,可知X2(t)中含有频带较窄的窄带噪声,X1(t)中含有频带较宽的宽带噪声。1915.3.2相关因Rx2(t)随t的增加而5.3.2相关
汽车在沙石搓板路上高速行驶时,其上垂直加速度传感器的输出波形如图(a)所示,自相关函数如图(b)所示。T=0.1s,说明汽车本身存在一个频率为10Hz的周期性振动。1925.3.2相关汽车在沙石搓板路上高速行驶5.3.2相关四、互相关函数的性质与特点
1、互相关函数的性质(1)互相关函数不是偶函数。根据定义令t'=t+t,则t=t'-t,dt=dt',则上式可写为1935.3.2相关四、互相关函数的性质与特点5.3.2相关在一般情况下,Ryx(-t)≠Ryx(t),Rxy(t)≠Ryx(t),Rxy(-t)≠Ryx(-t),故
所以,互相关函数不是偶函数。由式(5-69)给出的互相关函数的这一性质说明互相关函数与两信号的相位有关。1945.3.2相关在一般情况下,Ryx(-t)≠Ry5.3.2相关(2)互相关函数Rxy(t)在t=0处的值Rxy(0)不具有特征性。(3)互相关函数Rxy(t)有时也有最大值,即将两个信号中的某一个在时间上延迟一个t0后,则两信号最为相关或最为相似,但最大值的位置与具体情况有关。1955.3.2相关(2)互相关函数Rxy(t5.3.2相关
2、互相关函数的特点(1)互相关函数的计算要用到时间延迟信息,因而可用来测量有时间延迟信息的物理量,例如速度、流量等,而构成相关速度、流量计。这是一种先进的速度、流量测量方法。(2)对信号中的随机干扰噪声有极强的抑制能力。基于相关原理可将混叠在噪声中的微弱有用信号提取出来,或者说将噪声从信号中分离出去。1965.3.2相关2、互相关函数的特点1965.3.2相关
3、相关测速原理
这里讨论的速度是指运动物体相对于参考坐标系的移动速度,例如,带钢相对于辊道的速度等。如图所示为利用相关原理测量带钢速度的示意图。1975.3.2相关3、相关测速原理1975.3.2相关
两个光源的特性相同,照射到带钢表面上产生漫反射光,被光敏器件接收。两个光敏器件沿带钢运动方向安装,相距为L,将带钢表面产生的漫反射光转换成电信号,也要求它们的特性相同。1985.3.2相关两个光源的特性相同,照射到5.3.2相关两个光敏器件输出信号的波形图如图所示。在理想情况下,两个光敏器件产生的信号x1(t)和x2(t)除了在时间上相差t0(t0是带钢运动距离L所需的时间)之外,其波形是完全相似的。1995.3.2相关两个光敏器件输出信号的波形5.3.2相关实际上,这两个信号不可能做到完全相似,因为带钢还有横向振动,光源和光敏器件的特性也不可能完全相同。但实践证明,在一定条件下,二者的波形还是十分相似的。2005.3.2相关实际上,这两个信号不可能做5.3.2相关
如果设法将时间t0测出,而距
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 2026年保密工作知识竞赛活动方案策划
- 2026年高校知识产权管理规范贯标方案
- 2026年节能减排知识竞赛活动
- 2026年中小学语文阅读理解冲刺模拟题
- 2026年教育学初级模拟试卷
- 浙江省浙里2026年初中升学联考仿真卷(四)数学试卷
- 2026年小学二年级上册语文基础巩固与提升综合卷含答案
- 2026年小学二年级下册素养提升综合卷含答案
- 2026年海南省五指山市高三生物下册期末考试模拟卷含答案(轻巧夺冠)
- 接触网工(高级技师)理论知识试题
- 1956-1967国家科学技术发展远景规划纲要
- 山西省万家寨水务控股集团有限公司招聘笔试试题及答案2022
- 口语交际:倾听
- 导线三角高程计算表(表内自带计算公式)
- 清明古诗欣赏课件
- 电路基础实验北大未名BBS北京大学教学课件
- 2023广东惠州市惠城区桥西街道办事处招聘治安队员、党建联络员、社区“两委”班子储备人选考试通告考试备考试题及答案解析
- 大学生心理健康教育(第3版)PPT全套完整教学课件
- GB/T 9124.1-2019钢制管法兰第1部分:PN系列
- 现代通俗小说与-张恨水课件
- 人工气道的气囊管理
评论
0/150
提交评论