



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、控制科学与工程综合技术实验项目设计说明书项 目:电机转速控制系统姓 名: 学 号:xxxxxxxxxxxxxxxxxxxxx系xxxx年xx月xx日1 概述(系统基本功能描述)本项目主要介绍一种单片机实现直流电机闭环转速控制系统,该项目可以根据用户设定电机的转速,然后由单片机控制电机的转速在设定的范围内。该项目分为上位机的软件实现和下位机的软硬件实现,在上位机上可以设定电机的转速和PID控制中的参数,下位机实现控制电机转速为设定值。2 总体设计本系统以STC12C5A16S2单片机为核心,进行PWM斩波控制,以实现普通直流电机按设定速度运行。其中利用光电开关检测普通直流电机的转速,通过信号放大
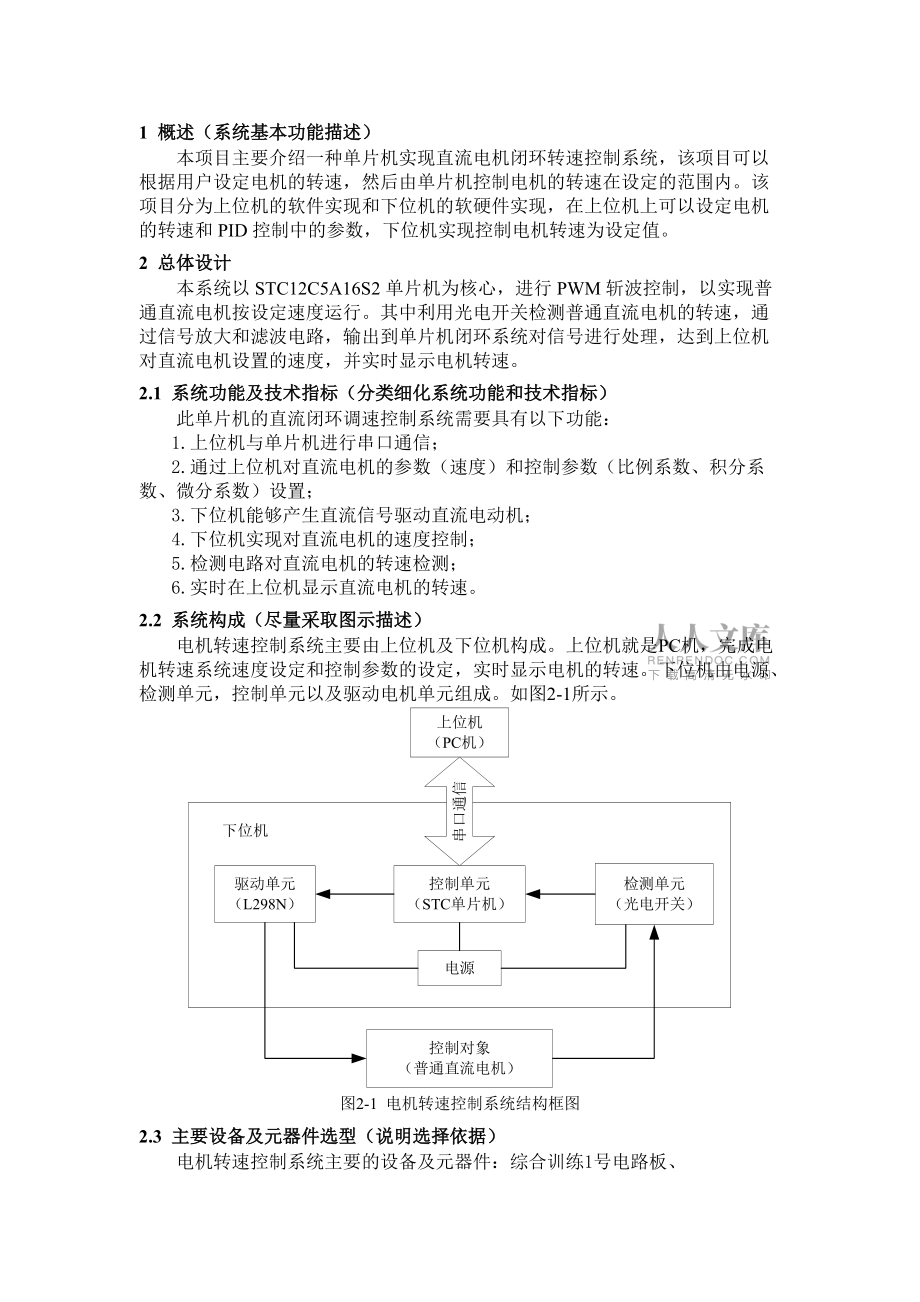
2、和滤波电路,输出到单片机闭环系统对信号进行处理,达到上位机对直流电机设置的速度,并实时显示电机转速。2.1 系统功能及技术指标(分类细化系统功能和技术指标)此单片机的直流闭环调速控制系统需要具有以下功能:1.上位机与单片机进行串口通信;2.通过上位机对直流电机的参数(速度)和控制参数(比例系数、积分系数、微分系数)设置;3.下位机能够产生直流信号驱动直流电动机;4.下位机实现对直流电机的速度控制;5.检测电路对直流电机的转速检测;6.实时在上位机显示直流电机的转速。2.2 系统构成(尽量采取图示描述)电机转速控制系统主要由上位机及下位机构成。上位机就是PC机,完成电机转速系统速度设定和控制参数
3、的设定,实时显示电机的转速。下位机由电源、检测单元,控制单元以及驱动电机单元组成。如图2-1所示。图2-1 电机转速控制系统结构框图2.3 主要设备及元器件选型(说明选择依据)电机转速控制系统主要的设备及元器件:综合训练1号电路板、STC12C5A60S2系列单片机、L298N电机驱动芯片、7805电压转换芯片、光电开关、发光二极管、电阻、电容、串行通信线、普通直流电机。2.4 系统核心处理策略(控制算法、信号处理方法等)电机转速控制系统采用自制光电传感器实时检测反馈脉冲信号,经单片机处理获得直流电机的实时速度,与给定速度比较得速度偏差e;速度偏差e,通过PID算法计算获得所要求的PWM占空比
4、,形成PWM控制电压驱动直流电动机运转,直至偏差e为0,实现普通直流电机的速度调节。 在电机转速控制系统中,对直流电机的速度的控制采用了常用的PID控制算法,即比例、积分、微分算法。一个系统要正常工作,起码的条件是要保证系统的稳定性,即系统不产生持续的振荡,甚至扩散的振荡。衡量一个系统的控制品质还有其他一些指标,分为稳态指标和动态指标两大类。稳态指标最重要的是稳态误差,在本例中就是稳态下的速度误差。动态指标主要包括:调节时间,超调量和振荡次数。PID控制中的每一项对系统的性能会产生不同的影响。PID算法包括3项:比例项、积分项和微分项。比例控制是根据被控制量(在本控制系统中是电机的实时转速)的
5、期望值与实测值之差(控制误差)驱动被控对象(电机);积分控制是根据控制误差的积分去驱动被控对象;微分控制是根据控制误差的微分(在数字系统中就是差分)去驱动被控对象。根据系统品质要求,为上述3个控制项选择合适的比例常数、和并把它们综合起来,产生一个综合的控制作用,就构成了PID控制算法。在本系统中,我们将实际转速值与预置转速值比较,得出差值。单片机通过对该差值进行PID运算,得出控制量,再由单片机输出控制参数,由PWM输出电路改变电机两端的有效电压,最终达到控制转速的目的。2.5 系统软硬件功能划分直流电机控制环节由转速检测环节、单片机控制环节、电机驱动电路以及上位机软件组成。其中转速检测环节和
6、电机的驱动电路环节属于该系统的硬件环节;而单片机控制环节和上位机软件属于该系统的软件环节。下面对系统的硬件和软件功能分别进行表述。2.5.1 系统硬件功能电机转速控制系统中,系统的硬件功能主要有:电机转速的检测环节和电机驱动电路环节。电机转速的检测环节是目的是检测电机的实际转速,本系统是通过间接的方法获得电机的转速,它通过光电开关的打开与关闭这两种状态的交替次数计算出电机的实际转速。电机转速控制系统的电机驱动电路环节采用L298N驱动芯片产生电机驱动信号,直接驱动直流电机运行。由电机检测环节检测到的上一时刻的速度,与设定值作比较,得出速度偏差e,单片机内部对偏差信号e经PID运算后,输出PWM
7、控制信号给驱动芯片L298N,根据PWM波形的占空比不同,施加在电机输入端的电压不同,从而达到对电机速度形成闭环控制。2.5.2 系统软件功能电机转速控制系统的软件分为上位机软件与下位机软件。上位机软件主要完成向下位机设置电机的设定速度;设置PID调节的比例系数Kp、积分系数Ki、微分系数Kd;显示电机的实时转速并绘图。其软件流程图如图2-2所示,图2-3是上位机串口中断服务程序流程图。图2-2 上位机软件流程图图2-3 上位机串口中断程序流程图下位机软件主要完成读入检测电路输入的脉冲个数,间接计算出电机的实际转速,然后根据PID算法计算出输出的PWM波形的占空比,然后由PCA0模块输出PWM
8、波,这样子就可以改变普通直流电机两端的电压,以实现控制电机转速的目的。其流程图如图2-4所示,图2-5是下位机定时器中断流程图,图2-6是下位机串口服务程序流程图。图2-4 下位机软件流程图图2-5 下位机定时器中断程序流程图图2-6 下位机串口中断程序流程图2.6 其他(人机交互、结构设计等)上位机的界面是采用VC编写,主要完成的功能有:设置PID调节的比例系数Kp、积分系数Ki、微分系数Kd;显示电机的实时转速并绘图。其截面图如图2-7所示。图2-7 VC编写的上位机界面3 详细设计直流电机控制环节由电源电压转换电路环节、转速检测环节、单片机控制环节、电机驱动电路以及上位机软件组成。其中系
9、统的硬件环节有转速检测环节和电机的驱动电路环节;而系统的软件环节有单片机控制环节和上位机软件。下面对系统的硬件设计和软件设计分别进行介绍。3.1 硬件设计硬件设计首先要确定系统的输入输出的,然后进行各个功能子系统的设计。3.1.1 输入与输出(确定输入、输出性质、数量和指标要求)在电机转速控制系统中首先确定系统的输入与输出。把该系统分为电源电压转换电路、最小系统电路(单片机控制系统)、电机转速检测电路和电机驱动电路这四个子系统。其各个子系统的输入输出变量如下表所示。输入变量输出变量电源电压转换电路12V5V最小系统(单片机控制部分)5V电源转速检测的脉冲信号PWM波形电压信号串口输入信号电机控
10、制的使能信号电机转速检测电路5V电源转速检测的脉冲信号电机驱动电路12V电源PWM波形电压信号电机电压信号电机控制的使能信号表3-1 电机转速控制系统的输入输出变量3.1.2 功能划分(以框图形式表示)硬件设计按功能划分为四个部分:电源电压转换电路、最小系统电路(单片机控制系统)、电机转速检测电路和电机驱动电路。如图3-1所示。图3-1 下位机功能划分示意图3.1.3 电源电压转换电路(元器件选型、硬件原理及功能描述)电源电压转换电路主要是为电机转速检测电路提供+5V的电源,电压转换电路主要由LM7805电压转换芯片组成。此电路产生的+5V电源电压稳定,可靠性高。此电路还包括系统上电指示LED
11、,通过它可以很方便的判断系统是否上电。图3-2 电源电压转换电路3.1.4 最小系统电路(单片机控制系统)最小系统电路(如图3-3所示)包括:STC12C5A08S2芯片、MAX232电平转换芯片、振荡电路、电源单元、输入输出部分、通信电路及复位电路。芯片选择宏晶所产的STC12C5A08S2型号的单片机,其功能齐全,性价比高,最重要的是,是在采用的是增强型51内核,指令兼容51,而且有ISP下载功能,只需用串口通信电路就能下载程序,免去了编程器。MAX232电平转换芯片是RS-232标准串口设计的单电源电平转换芯片,将电脑用的RS-232串口电平和单片机的TTL电平相互转化的。在最小系统电路
12、(如图3-3所示)中,该最小系统集成直流电源模块(采用USB供电,直流5V电源),USB模块,串口通讯模块,STC12C5A16S2单片机,22.1184MHz晶振时序模块等。图3-3 单片机最小控制系统3.1.5 电机转速检测电路电机转速检测电路(如图3-4所示)选择价格便宜、功能单一的光电开关(GK105A)来实现对转速的检测。图3-4所示电路中,R10起限流电阻的作用,当有光直射回来时,光电开关中的三极管导通,R11的下端变为低电平;当没有光直射回来时,光电开关中的三极管不导通,R11的下端为高电平。图3-4 电机转速检测电路3.1.4 电机驱动电路直流电机驱动电路的组成如图3-5所示,
13、电机驱动电路主要由L298N驱动芯片组成。图3-5 电机驱动电路L298N是一款单片集成的高电压、高电流、双路全桥式电机驱动,设计用于连接标准TTL逻辑电平,驱动电感负载(诸如继电器、线圈、直流电机和步进电机)。L298N可以用来驱动两个电机,但是在本设计中我们只用来驱动一个普通的直流电机。INPUT1输入PWM波,INPUT2接低电平,使能端ENABLEA输入高低电平,来驱动电机。其控制逻辑表如下:ENAIN1IN2电机运转情况HHL正转HLH反转HHH刹停LXX停止表3-2 L298N逻辑关系由表3-2可知EnA为低电平时,输入电平对电机控制起作用,当EnA为高电平,输入电平为一高一低,电
14、机正或反转。同为低电平电机停止,同为高电平电机刹停。3.1.6 系统原理图及元器件清单系统的原理图就是由以上的电源电压转换电路、最小系统电路(单片机控制系统)、电机转速检测电路和电机驱动电路这四部分组成,各个部分的原理图见图3-2到图3-5所示。电机转速控制系统的元器件清单如下表3-3所示:表3-3 电机转速控制系统的元器件清单3.2 软件设计电机转速控制系统的软件设计分为下位机控制程序设计、上位机显示程序设计和传输的数据格式设计。3.2.1 下位机控制程序设计(以框图形式表示,确定主程序框架)单片机控制软件的功能主要有:单片机的初始化、计算电机的实时转速、发送实时速度给上位机、根据PID参数
15、计算输入信号的占空比、PCA0模块输出PWM波形、定时器中断、PCA1模块的捕获电平上升沿中断、串口中断。其流程图见图3-4所示。图3-4 单片机控制流程下位机软件主要完成读入检测电路输入的脉冲个数,间接计算出电机的实际转速,然后根据PID算法计算出输出的PWM波形的占空比,然后由PCA0模块输出PWM波,这样子就可以改变普通直流电机两端的电压,以实现控制电机转速的目的。图3-5是下位机定时器中断流程图,图3-6是PCA1模块的捕获电平上升沿中断服务流程图。图3-7是下位机串口服务程序流程图。图3-5 下位机定时器中断服务程序流程图图3-6 PCA1模块的捕获电平上升沿中断服务程序流程图图3-
16、7 下位机串口服务程序流程图3.2.2 上位机显示程序设计上位机的软件流程有:初始化界面及其参数、设置电机的转速、设置PID参数、串口中断。其流程如图3-8所示。图3-8 上位机软件流程图上位机的界面是用VC6.0编写的。界面如图3-9所示。图3-9 VC6.0编写的上位机界面上位机软件主要完成向下位机设置电机的设定速度;设置PID调节的比例系数Kp、积分系数Ki、微分系数Kd;显示电机的实时转速并绘图。图3-10是上位机串口中断服务程序流程图。图3-10 上位机串口中断服务程序流程图3.2.3 数据传输格式设计在电机转速控制系统中涉及到上位机向单片机发送设置的电机转速、设置PID参数,下位机
17、要向上位机发送电机的实时转速,这就要设计他们之间的数据传输格式。下位机通过串口向上位机发送的数据只有电机的实时转速,所以设计其格式为四个字节的数据包。其中第一个字节发送0xFF,数据发送的起始字节;第二位是电机实时转速的高位字节;第三位是电机实时转速的低位字节;第四位发送的数据是0x00,数据发送的终止字节。其结构如图3-11所示。0xFF转速的高字节转速的低字节0x00图3-11 下位机向上位机传输数据格式上位机通过串口向下位机发送的数据有:电机的启动、电机的停止、PID的比例系数Kp、PID的积分系数Ki、PID的微分系数Kd、设置电机的转速,所设计的发送数据包为五个字节,其中第一个字节是
18、数据的起始字节0xFF;第二个字节是所要设置数据的标号(电机启动0x01,电机停止0x02,比例系数Kp0x03,积分系数Ki0x04,微分系数Kd0x05,电机的转速0x06);第三位是所要发送数据的高字节,第四位是数据的低字节;第五位是停止字节0x00。其结构如图3-12所示。0xFF数据标号数据的高字节数据的低字节0x00图3-12 上位机向下位机发送数据格式4 调试与测试在设计了电机转速控制系统的硬件和软件之后,就可以编写软件程序和焊接电路板。有了硬件电路板,就能够进行软件调试。4.1 调试(主要控制参数或策略确定方法、实验结果、出现问题与解决方法)在电机转速控制系统中,PID的参数影
19、响着控制精度,对于该系统,我选择的PID参数如下所示:PID算法中的参数Kp是误差放大倍数,Kp加大,使系统的动作灵敏,速度加快,稳态误差减小;Kp偏大,振荡次数加多,调节时间加长;Kp太大时,系统会趋于不稳定;Kp太小,又会使系统的动作缓慢。经过反复试验,我的Kp选为15-30。Ki是调整控制精度的,Ki太小,系统超调量大,增大Ki可以消除稳态误差,提高系统的控制精度。经调试,Ki选为20左右。Kd可以改善动态特性,Kd只有取得合适,才能使超调量较小,减短调节时间。本系统的Kd选为20左右。在系统的调试过程中,遇到了许多的问题,例如:(1)板子连接好后,单片机的输出电平不一致,解决方法是将单
20、片机的地线和12V的外接电源的地线接到一起,达到公地的目的。(2)串口发送数据与接收数据的不一致,在发现问题之后,设置断点,查看发送数据与接收数据,发现问题出现在自己设置的数据类上面,修改数据类型之后,串口发送数据正确。(3)还有就是协议的问题,没有设置好,导致发送的数据无法接收,最后完善自己以前的协议内容,数据发送与接受正常,满足自己的传输要求。4.2 测试(测试内容及结果)在调试完程序之后,基本保证程序能够正常的完成所要求的基本功能之后,然后将程序下载到单片机里,用串口和PC机相连,联调程序。基本上能够使电机的转速在设定的范围内。在设置电机转速在1300r/min时,控制效果如图4-1所示。当设置为2000r/min时,控制效果如图4-2所示。当设置为3000r/min时,控制效果如图4-3所示。当设置为4000r/min时,控制效果如图4-4所示。当设置为45000r/min时,控制效果如图4-5所示。图4-1 在设置电机转速在1300r/min时,控制效果
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 狼获奖课件教学课件
- 统计分析软件模拟试题三及答案
- 飞向太空的航程说课稿
- 队列口令说课稿
- 适合小班课件教学课件
- 怎样评价课件教学课件
- 南京工业大学浦江学院《公益营销》2021-2022学年第一学期期末试卷
- 南京工业大学浦江学院《筹资原理和技巧》2022-2023学年第一学期期末试卷
- 秸秆打捆协议书(2篇)
- 南京工业大学《应用统计学》2023-2024学年第一学期期末试卷
- 新苏教版三年级上册科学全册知识点
- 2024版专升本宣讲课件完整版
- 2025数学步步高大一轮复习讲义人教A版复习讲义含答案
- 车站调度员技能大赛理论考试题库(单选、多选题)
- 2024-2030年桦树汁行业市场现状供需分析及重点企业投资评估规划分析研究报告
- 创新创业心智模式探索智慧树知到期末考试答案章节答案2024年天津农学院
- 2024年九年级化学上册 第6单元 碳和碳的氧化物教案 (新版)新人教版
- 2024详解新版《公司法》课件
- 医院法律、法规培训课件
- 2024年高考作文真题解读(立意+提纲+范文+总评)
- 美沙酮门诊管理新规制度
评论
0/150
提交评论