



下载本文档
版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、实用标准文案振动力学习题集(含答案)1、质量为mi的均质细杆约束在铅锤平面内作微幅摆动,1.1质量为m的质点由长度为 如图E1.1所示。求系统的固有频率。精彩文档图 E1.1解:系统的动能为:T =m m(xl 2 +1 Ix222其中I为杆关于镀点的转动惯量:1 m12Tdx x).lm1lx2dx = 1m1I23则有:系统的势能为:12 ,23m m1 l x61 .2 2112 2T = ml xmnl x2 6U =mgl 1 -cosxmig ; 1 -cosx12121 _2=-mglx 7 m1glx2m mi glx利用x =Gx和T =U可得:1.2 质量为m、半径为R的均
2、质柱体在水平面上作无滑动的微幅滚动,在CA=a的A点系有两根弹性刚度系数为k的水平弹簧,如图 E1.2所示。求系统的固有频率。图 E1.2解:如图,令日为柱体的转角,则系统的动能和势能分别为:TIB /mR2 mR2 22 = - mR222224U=2 1kR aF2=kR a2u2利用S=6科和T =U可得:_ 4k R a2 R a 4kn3mR2R 3m1.3 转动惯量为J的圆盘由三段抗扭刚度分别为ki, k2和k3的轴约束,如图E1.3所示。求系统的固有频率。kik2图 E1.3解:系统的动能为:T2k2和k3相当于串联,则有:卜2。2卜3%以上两式联立可得:k3_ik2k3系统的势
3、能为:2-21ki k2k3 , k2 k3 1'.22_k2k3利用日=切力和T =U可得:k2 k3ki k2k3J k2k31.4在图E1.4所示的系统中,已知ki(i =1,2,3) m, a和b ,横杆质量不计。求固有频率。图 E1.4答案图E1.4解:对m进行受力分析可得:mgX3 - k3如图可得:F1 mgbF2mgax1 = - =, x2 =二k1a b k1k2a b k2a x2 - x1a2kl b2k2Xo = X1 x = x1 =2mga b a b2kka2k1 b2k211x = x0 x3 = 2 - mg 二 一 mgILJa b k1k2 k3
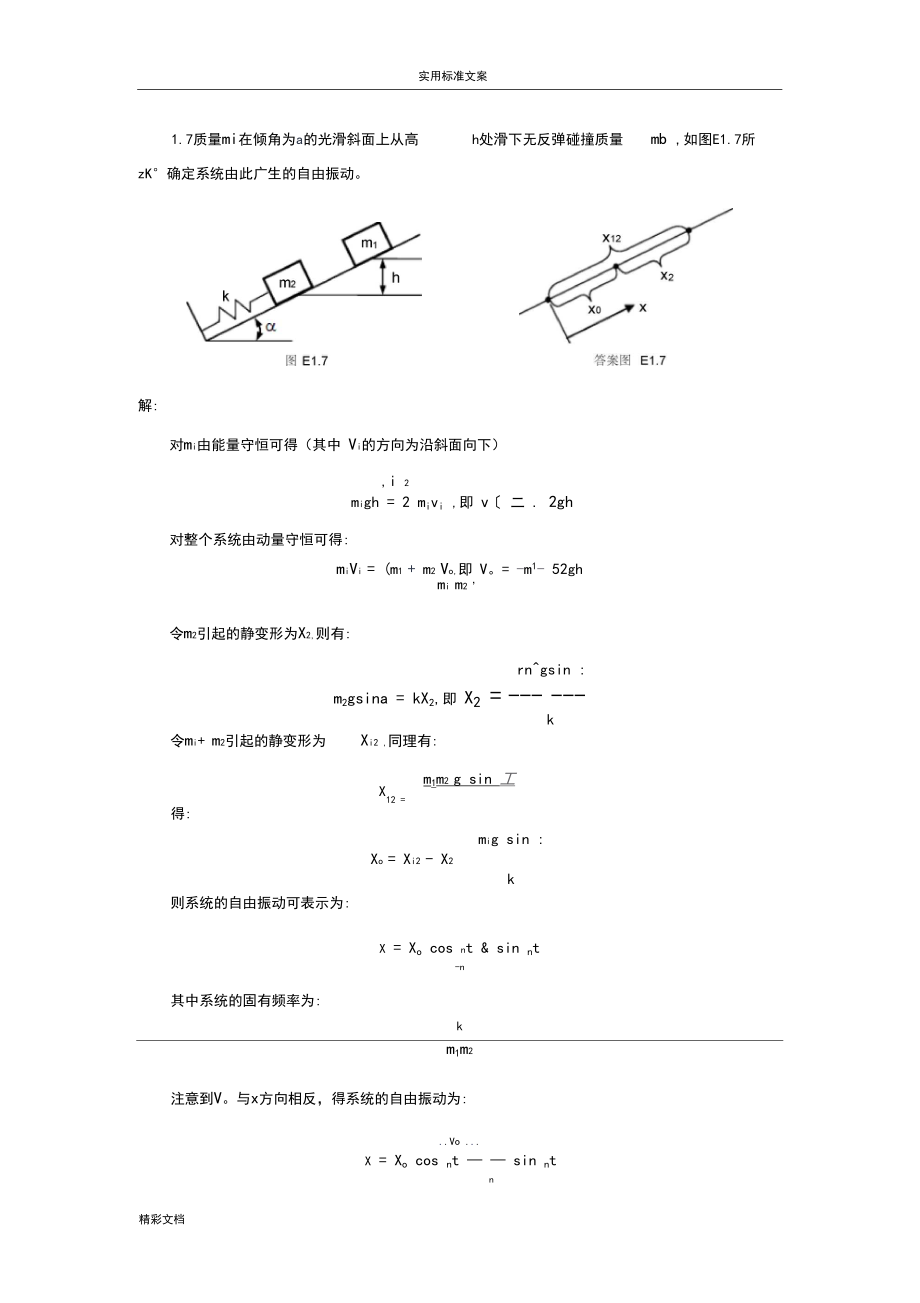
4、k0则等效弹簧刚度为:k =(a + bfkA2k3e a2k1 k3 + b2k2k3 + (a + b 2 k1k2则固有频率为:Q ='七二_ kk2k3(a+bfn m mmk1k2(a+b 2+k3(k1a2 + k2b2)1.7质量mi在倾角为a的光滑斜面上从高h处滑下无反弹碰撞质量mb ,如图E1.7所zK°确定系统由此广生的自由振动。解:对mi由能量守恒可得(其中 Vi的方向为沿斜面向下),i 2migh = 2 mivi ,即 v 二 . 2gh对整个系统由动量守恒可得:miVi = (m1 + m2 Vo,即 V。= -m1- 52ghmi m2 令m2引
5、起的静变形为X2,则有:rngsin :m2gsina = kX2,即 x2 =k令mi+ m2引起的静变形为Xi2 ,同理有:X12 =m1m2 g sin 工得:mig sin :Xo = Xi2 - X2k则系统的自由振动可表示为:x = Xo cos nt & sin nt-n其中系统的固有频率为:km1m2注意到V。与x方向相反,得系统的自由振动为:.Vo .x = Xo cos nt sin ntn1.9质量为m、长为l的均质杆和弹簧 k及阻尼器c构成振动系统,如图 E1.9所示。以 杆偏角e为广义坐标,建立系统的动力学方程, 给出存在自由振动的条件。若在弹簧原长处立即释手
6、,问杆的最大振幅是多少?发生在何时?最大角速度是多少?发生在何时?是否在 过静平衡位置时?答案图E1.9解:利用动量矩定理得:12I 日=-k6a a -c0l l , I = ml32 .2 .2 .ml 6 +3cl 日 +3ka 日=0,ml23cl2ml23c 12m n:1mgl2ka21.12面积为S、质量为m的薄板连接于弹簧下端,在粘性流体中振动,如图 E1.12所 示。作用于薄板的阻尼力为 Fd = N2Sv, 2S为薄板总面积,v为速度。若测得薄板无阻尼自由振动的周期为To ,在粘性流体中自由振动的周期为Td。求系数N。解:平面在液体中上下振动时:mx 2Sx kx = 02
7、2-2 二 To2日S=2 . % =Sm n1- 2k -j2S22 二 2 二Td - To 'k - j2s2 k2.1图E2.2所示系统中,已知 m, c, ki,k2, F0和切。求系统动力学方程和稳态响应。Xiki AAAA/Hci解:k2X2CEW图 E2.1等价于分别为x1和x2的响应之和。先考虑力为图(b),故:答案图E2.1(a)Xmxk1 x x1c1 x,x1答案图E2.1(b)x1,此时右端固结,系统等价为图(a),受mx k1k2 x g c2 x = k1x gxkik2mmx cx kx = KAsin GA cos,1tc = g + c2, k =
8、ki + k2, 0nkiAi(1)的解可参照释义(2.56),为:sin jt - %c1Ai 1 cos d-%V(1 - s2 ) +(2-sfk Ki -s2)+(2bf其中:2 s1 -s,+ ci 女2 以限 ki + k2 J 1 ki + k2 1vi +(2-s 2J(ki +k2 f +(g +c2J(i -s2 2 +(2* 2 =k1 k2故(2)为:ki k2 - mkif+(G +c2 20i2k2xt 二kiAi sin it - -iCiAi i cos it 一 %,(ki +k2 -m%2 2 +(g +5 2孙2J-khjsin 侬it - 日i +3 )
9、(ki+k2mR )十匕十。2/1Egc i kik22,1 mkik2EgJC1C2 1k1k2 - 12 m口21 ci 1二tg T考虑到x2a)的影响,则叠加后的x(t )为:x t =一i -kik2 - m iAK2 G22sin 飒t -tgc1 ' c2 - ' i . j_1Cik1k2 - 2m g '2.1 一弹簧质量系统沿光滑斜面作自由振动,如图T 2-1所示。已知,Ct =301m = 1 kg,k = 49 N/cm,开始运动时弹簧无伸长,速度为零,求系统的运动规律。答案图T 2-1解:1 9.8 1mgsin a = kx0, x0 = m
10、g:n =2 = 0.1cmx = x0cos nt - -0.1cos70t cm2.2 如图T 2-2所示,重物W1悬挂在刚度为k的弹簧上并处于静平衡位置,另一重物 W从高度为h处自由下落到W1上而无弹跳。求W2下降的最大距离和两物体碰撞后的运动规 律。Wi图 T 2-2平衡位置答案图T 2-2解:,1W2 2W2h2 v2, v2 = 2gh2 g动量守恒:W2V2 gWiW2Vi2 ,v12W2W1W2平衡位置:Wi = kx1 , x1 =四k皿W2故:WI +W2 = kxi2 , X12 ='kW2Xo -X12 - Xi =-kk:gn wW2 g . W W2故:x
11、= -x0 cos ntX0 sin ntnv12=-Xo cos ntsin nt 'n2.4在图E2.4所示系统中,已知 m,原长。求物块运动规律。xik2F0 sin tkiXk2 x2 'X k2 x2 - xi-rr Fosin tmx2解:图 E2.4答案图E2.4取坐标轴”和X2,对连接点A列平衡方程:k1x1k2 x2 -x1F0sin t = 0即:k1k2 为: k2x2F0 sin t对m列运动微分方程:mx2 = -k2 % - x1即:mx2 k2x? = k2x1由(1), (2)消去xi得:故:由(3)得:mx2x2 =in t k1k2k1k2(
12、3)2k1k2m k1 k2乂2 t =F ok2mkik22 - 12cosin t - sin ntconki, k2, Fo和切,初始时物块静止且两弹簧均为x=Vo ,求系2.5 在图E2.3所示系统中,已知 m, c, k, Fo和,且t=0时,x=%,统响应。验证系统响应为对初值的响应和零初值下对激励力响应的叠加。解:x t )=e 0t Cc0s dt Dsin dt 产 Acos t - 二a3一1一.k q(i-s2)+(2321 -sx 0 = x0 =C Acos1= C = x0 - Acosx(t )=&0e&t(Ccos8dt + Dsinodt)+
13、et(-Ccd sin8dt + D0d cos%t)-Ao sin(ot -9 )v0 ;匚二0c A sin 1x 0 二 v0 二一 0c D d A,sin【二 D =.'d'd求出C, D后,代入上面第一个方程即可得。2.7由一对带偏心质量的等速反向旋转齿轮构成的振动机械安装在弹簧和阻尼器构成的支承上,如图 E2.7所示。当齿轮转动角速度为 6时,偏心质量惯性力在垂直方向大小为meE2sinCOt。已知偏心重 W = 125.5 N,偏心距e = 15.0 cm,支承弹簧总刚度系数 k = 967.7N/cm,测得垂直方向共振振幅 Xm = 1.07cm,远离共振时垂
14、直振幅趋近常值X。= 0.32cm。求支承阻尼器的阻尼比及在 於=300r/min运行时机器的垂直振幅。解:Xt =imem2 sinmt图 E2.7meMtg1 -s2s=1时共振,振幅为:Xime1, -=1.07cm 2(1)远离共振点时,振幅为:X2me=0.32cm(2)me由(2 =. M = -X2由(1)一me 1 me一 M 2X1 - me X212X1二翕川150 3300门 min , 00 =, s M1故:2X =mes=3.8 104mM . 1-s22 s22.7求图T 2-7中系统的固有频率,悬臂梁端点的刚度分别是K及k3 ,悬臂梁的质量忽量图T 2-7答案图
15、 T 2-7解:kikoki和k2为串联,等效刚度为:ki2 =一。(因为总变形为求和)ki k23和k3为并联(因为ki2的变形等于k3的变形),则:k123=k12k3 二k1k2kik2k3k1k2k1k3k2k3kik2ki23和k4为串联(因为总变形为求和),故:kek123k4k123k4k1k2k4 k1k3k4k2k3k4此 kk k2k3 心 k2k4故:2.9如图T 2-9所示,一质量 m连接在一刚性杆上,杆的质量忽略不计,求下列情况系 统作垂直振动的固有频率:(1)振动过程中杆被约束保持水平位置;(2)杆可以在铅锤平面内微幅转动;(3)比较上述两种情况中哪种的固有频率较高
16、,并说明理由。图 T 2-9解:(1)保持水平位置:nk1k2(2)微幅转动:FiX2 - liX = xix :一, l2kili12mglil2 ki12mglilil2lil2liI2 ki-li I2Mi I2 k2 li I2 ki11kl l2k2 mgli I2 k1k2mg12k2 li l2 Yki-liMm- 2mgli l2 k1k222112kl 122k22mgli l2 k1k2故:li l2 谒 112kl 12k22.i0求图T 2-10所示系统的固有频率,刚性杆的质量忽略不计。解:图 T 2-10答案图T 2-10m的位置:x = x2 +xk2Xamgl =
17、 F1a ,FimglX1aXa 1axA _ i x1 一一 12mgla2k1x2XA =mg . mgl 22k a kk2l2mgK22a k11k2a k1k2mga2 k1k2a2k112k2 '2.11图T 2-11所示是一个倒置的摆。摆球质量为m,刚杆质量可忽略,每个弹簧的刚k度为ko2(1)求倒摆作微幅振动时的固有频率;(2)摆球质量m为0.9 kg时,测得频率(fn )为1.5 Hz, m为1.8 kg时,测得频率为0.75Hz ,问摆球质量为多少千克时恰使系统处于不稳定平衡状态?零平衡位置O0/、答案图T 2-11(1)解:(1)=22 (if 2-mgl 1 -
18、 cosl cos 二,零平衡位置答案图T 2-11(2)12 21. 212. 2ka - mgh =一 ka -mgl?222利用 Tmax = U maxmax =n? max,2, 2ka - mglkagml2ml2 lg 'ka2l (mgl-1JT =1 H2 =1ml2-2U =2111k 而a 2 +2 2m glcos -=,ka2日2+mgl 1 - 2sin2 i2I 2 J12 21212 2ka mgl mgh =- ka -mgl 二 mgl222d(T+U1=0, 2ml28+28ka2mglp =0 dtml21 ka2 - mgl 1-0ka2 -
19、mglml22.17(1)图T 2-17所示的系统中,四个弹簧均未受力,k1= k2= k3= k4= k,试问:若将支承缓慢撤去,质量块将下落多少距离?(2)若将支承突然撤去,质量块又将下落多少距离?图 T 2-17sirk2解:k23 -k2 k3 -2kkik23_2"kik23 -3_ki23 k4k123k4=2k(i),2mgmg =1234%,xok4mg(2) X(t )= xo COSE nt , xmaX = 2 X。= k2.19如图T 2-19所示,质量为m2的均质圆盘在水平面上可作无滑动的滚动,鼓轮绕轴的转动惯量为I,忽略绳子的弹性、质量及各轴承间的摩擦力,
20、求此系统的固有频率。图 T 2-19解:系统动能为:系统动能为:= 1imi2R2m2 x2= 2mex121Vk2xk122R2k2kiR2_ 1 12=2 kex根据:Tmax - Vmax ?xmaxk2 k1RiR2miR2R222.20如图T 2-20所示,刚性曲臂绕支点的转动惯量为Io,求系统的固有频率。mi图 T 2-20121 .T 二 - m1x-Ii22 R2m2x2+111m2r2丫"1解:系统动能为:|2212Ar J系统动能为:1.2121; 2T = 2I0i 5ml 为5m2 T1 .2,2.2=一 I0m1am2l 二2V -1k1 -a2 1k2 -
21、l 2 1k3 -b2=-k1a2 k2l2 k3b2 12根据:2Tmax = Vmax, 【max = 'nmax2222k1ak2lk3b'n22"10m1am2l答案图T 2-242.24 一长度为l、质量为m的均匀刚性杆较接于 O点并以弹簧和粘性阻尼器支承,如 图T 2-24所示。写出运动微分方程,并求临界阻尼系数和无阻尼固有频率的表达式。图 T 2-24解:利用动量矩方程,有:12J 8 = k% a -cl l , J = 一 ml3ml% 3cl2u 3ka% - 03cl2 ml2=2"2.25 图T 2-25所示的系统中,刚杆质量不计,写
22、出运动微分方程,并求临界阻尼系数 及阻尼固有频率。答案图T 2-25解:mW l ca a k北 b = 0ml% ca21kb21 - 0m*2 ca ml2= 2-0n,-2ca222ml n2ca2mlb kl m4m2l2b2 k1,4kml2b2 -c2a42ml2, , 2bli由=1= c = 2 v mka2.26 图 T 2-26 所示的系统中,m = 1 kg , k = 144 N / m , c = 48 N ?s / m, li = l = 0.49 m ,12= 0.5 l, I3 = 0.25 l,不计刚杆质量,求无阻尼固有频率8n及阻尼二。图T 2-26答案图
23、T 2-25解:受力如答案图T 2-26。对O点取力矩平衡,有:m 111 11 cT3 l3k112 12 =02 .2 .2 .m11,c13 rl k12 1-011m t1 ct1 k 1 - 0164k =36 m= n =6 rad /s c=J =16m1=0.252.n4.7两质量均为m的质点系于具有张力 F的弦上,如图E4.7所示。忽略振动过程中弦 张力的变化写出柔度矩阵,建立频率方程。求系统的固有频率和模态,并计算主质量、主刚度、简正模态,确定主坐标和简正坐标。图 E4.7答案图E4.7(1)解:sin a161, sin 仇=% = , sin 包=a=根据mi和m2的自
24、由体动力平衡关系,有:m1y1 - -F sin % F sin 叫-F ; F y2 y1 = : y2 - 2y1N2- Ni_、2m2y2 = -F sin i2 - F sin 飞=-F - -F = -p yi - 2y2故:m10y1F 2一1y1=0_0m2_y2 i IL-12 _y22 .ml当色=m2时,令:y1 =丫 sincct, y2 = Y2 sin6t,代入矩阵方程,有:一九-1 fl。L-1 2fM2 一九 12、.、=(2 九)一1=(九一1 (九一3 )= 012 人1,2 = 1,32 _ F _ F 2 _ F _ 3F8 1 一 加 一 , 切 2 一
25、 " 九2 一 ' ml ml ml ml根据(2九X -Y,=0得:丫2.,12f IX,22%第一振型答案图4.11多自由度振动系统质量矩阵 M和刚度矩阵K均为正定。对于模态 为和Xj及自然数n证明:xT (MKMx j=0, X (KM,Kxj=0解:Kxj = 6 2 Mx j,等号两边左乘 KM,KMKxj =0:KM,Mxj =mjKxj,等号两边左乘 xTxT KMK< j =0: xT Kxj 】=0,当 i # j 时重复两次:KM,Kx j =sj Kx j ,等号两边再左乘 KMKMKMKxj =co: KM,K 4j ,等号两边左乘 xTxiT
26、KM:Kxj =6:xT KM/K Kj = 0 ,当 i # j 时重复n次得到:xT KM 打 Kx j =0 21Kxj =co:Mx j,等号两边左乘 MKMK,Kxj = :MK/Mxj故:Mxj =«:MK,Mxj ,等号两边左乘 xiTxTMxj =0:xT MK,M k=0,当 i # j 时即 xT Mx j = 0 ,当 i * j 时重复运算:MK 4Mx j = : MK:Mx jxiTMK,Mxj =8:xT MK。了Mxj =0 ,当 i # j 时重复n次。2.10图T 4-11所示的均匀刚性杆质量为 mi,求系统的频率方程。解:先求刚度矩阵。令 a =
27、 1, x = 0,得:图 T 4-11k11 = k1b bk2a a = k1b2k2a2kiik2i = -k2a令a =0, x =1ki2 = -k2ak22 - -k2则刚度矩阵为:kb2k2a2K 二IL - k2a-k2ak2再求质量矩阵。m11=1m1a2,m21 =03mi2=0, m22则质量矩阵为:2m1a故频率方程为:5.1质量m、长m2I、抗弯刚度kubmhk271ak21 1答案图T 4-11(1)mim2ki2* k2 im2答案图T 4-11(2)m1k22mum2答案图T 4-11(3)m21EI的均匀悬臂梁基频为3.515(EI / ml3)1/2,在梁自
28、由端放置集中质量mi。用邓克利法计算横向振动的基频。解:211 =3.515''2l33EI m1l32.,2EI 112.355EI6.088l 3m 12.355ml l5.2不计质量的梁上有三个集中质量,如图 E5.2所示。用邓克利法计算横向振动的基频。3mo解:l/4l/4l/4l/4图 E5.2当系统中三个集中质量分别单独存在时:f119 1/4312EI二,f22 -16 l /4 312EI- I2129 1/4 312EI11一二2 =mf11 mf22 3mL ®3,2213ml3192EI3.843 EI1 = l l5.3在图E5.3所示系统中,
29、已知m和k。用瑞利法计算系统的基频。WW 2m 2k7777777T77777779z7777777777j图 E5.3解:近似选取假设模态为:甲-1 1.5 2.5 T系统的质量阵和刚度阵分别为:3k-2k0M =diag(m 2mm), K= -2k 3k -k-0-kk _由瑞利商公式:RV'PT K'P,, M 彳2.5k11.75m5.9 在图E5.9所示系统中,已知 k和J。用传递矩阵法计算系统的固有频率和模态。J/2(2)图 E5.9解:两端边界条件为:固定端:自由端:xrFJ”X2 LirX 2R=S2 X 1R2 JCO 22k 一由自由端边界条件得频率方程:
30、2 J-O 2kJ0二J十2kk12 J I:2k人2 J Y + 10 11 < 2k人=* =0.765. k12= 1.8481k : J代入各单元状态变量的第1,kJk2得到模态:巾=1 1.414T ,巾1 -1.414T5.10 在图E5.10所示系统中,已知 GIpi ( i = 1 , 2) , li ( i = 1 , 2)和Ji ( i = 1 , 2)。用传递矩 阵法计算系统的固有频率和模态。J1J2GI p1GI p2 12 解:两自由端的边界条件为:图 E5.10实用标准文案,3 2ml 1精彩文档X 2R=S2 X 1R5x : =sP x 1L =RL _
31、QF RX 1.5 一 X 1.5 一 S1 X 1k21_ .2 Jk2其中:k1 = ap1 , k2I1GIp2=oI 2由自由端边界条件得频率方程:12 CO1 k1 "jk11Tlik1 2 .-J1c/jjk1k1J1Jk2k24JJ - 2J1 - 2j2 k2=0= ' -1=0,G"J1 J , JJ 2 1P112 T p211代入各单元状态变量的第元素,即:得到模态:12J1-ok12 J1k2型1) = 1 1,©=|15.11在图E5.11所示系统中悬臂梁质量不计, 的固有频率。m、l和EI已知。用传递矩阵法计算系统图 E5.11解:引入无量纲量:yMly = , M =, FSyI日_ Fsl2EIEI实用标准文案精彩文档定义无量纲的状态变量:X - y - MFs T边界条件:左端固结:x 0R=00 M FsT,右端自由:-ly 1 0 0T根据传递矩阵法,有:X1R=S1P sF X 0R其中点传递矩阵和场传递矩阵分别为:一100101【61得:MFs = 0-AM + 261 FS=01a)= 1 , 一flj21 3EIlml利用此齐次
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 零售行业市场营销策略与效果分析互动方案
- 广告投放效果评估作业指导
- 小学主题班会课件:创新如源泉激发智慧花
- 更新设备采购清单确认函6篇范文
- 企业员工网络安全防护规范指南
- 2026闽都创新实验室高端合金粉体项目组招聘1人(福建)考试备考试题及答案详解
- 2026年泉州市洛江区事业单位人员招聘考试备考题库及答案详解
- 旅游景区服务质量全面提升指南
- 2026重庆水利电力职业技术学院招聘考试模拟试题及答案详解
- 2026年山西省事业单位人员招聘笔试模拟试题及答案详解
- 心电图操作技术讲课文档
- 课堂满意度调查问卷设计方案
- 2026年法考主观题预测预测
- (2026年)分级护理制度与流程课件
- 2026届广东高考志愿填报参考课件
- 2026年重庆市八年级地理生物会考考试题库(含答案)
- 三年级数学计算题300道
- 2026华泰证券Fintech金融科技人才专场校园招聘备考题库完整参考答案详解
- (2025年)四级物业管理师练习试题附答案
- 2025年输血技术正高考试试题回忆版
- 四川省凉山州2022-2023学年五年级下学期数学期末试卷(含答案)
评论
0/150
提交评论