



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
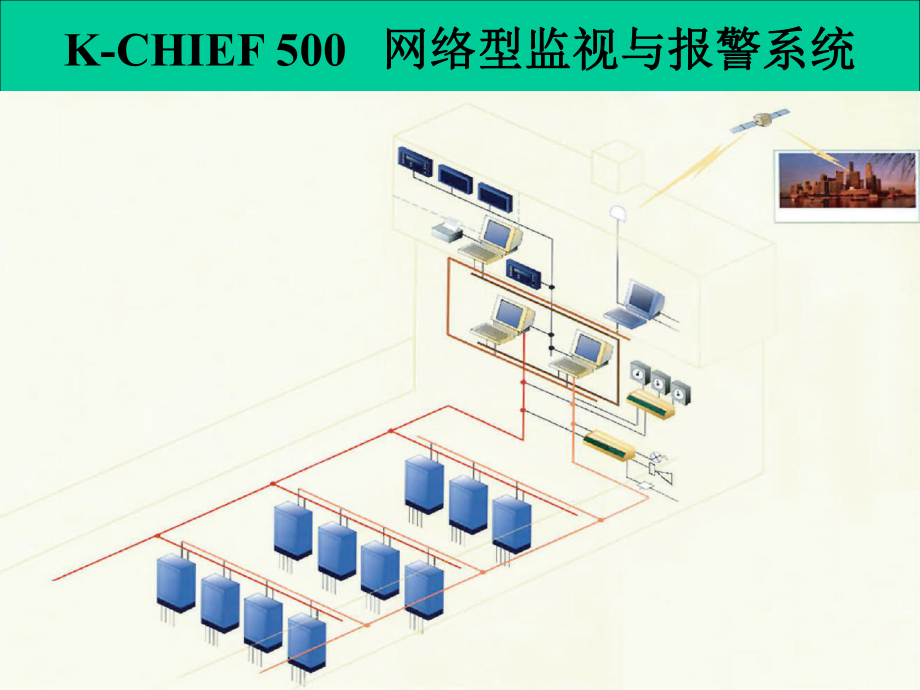
1、K-CHIEF 500 网络型监视与报警系统网络型监视与报警系统一、概述一、概述 系统类型:集中型、分散型、网络型(全分布式)。系统类型:集中型、分散型、网络型(全分布式)。 集中型系统:采用单台计算机的结构形式,可靠性集中型系统:采用单台计算机的结构形式,可靠性较差,一旦计算机发生故障,则整个系统完全瘫痪。较差,一旦计算机发生故障,则整个系统完全瘫痪。 集散型系统(集散型系统(DCS):采用集中和分散相结合的系):采用集中和分散相结合的系统结构,监视任务由多台微机分别完成,各子系统统结构,监视任务由多台微机分别完成,各子系统与上位机进行通信,实现集中管理和信息共享。与上位机进行通信,实现集中
2、管理和信息共享。DCS是一种对生产过程进行是一种对生产过程进行分散控制、集中监视和分散控制、集中监视和操作管理操作管理的系统。的系统。 集散型系统通常由操作站集散型系统通常由操作站(或称总站或称总站)、现场控制站、现场控制站(或称分站或称分站)和通信总线三部分组成。和通信总线三部分组成。 在集散型系统中,如果操作站发生故障,现场控制站仍在集散型系统中,如果操作站发生故障,现场控制站仍然可以独立工作;反之,如果某现场控制站有故障,只然可以独立工作;反之,如果某现场控制站有故障,只会影响它负责的部分监视点,不至于导致系统全盘瘫痪。会影响它负责的部分监视点,不至于导致系统全盘瘫痪。在早期的集散型系统
3、中,各子系统计算机与现场仪表之在早期的集散型系统中,各子系统计算机与现场仪表之间大多采用模拟量进行信号传输,所以在机旁和子系统间大多采用模拟量进行信号传输,所以在机旁和子系统计算机之间需敷设大量的电缆。另外,模拟信号长距离计算机之间需敷设大量的电缆。另外,模拟信号长距离传输所引起的干扰也较严重。传输所引起的干扰也较严重。 一些公司应用传统控制网络技术对子系统进行改造,一些公司应用传统控制网络技术对子系统进行改造,即在控制对象附近放置现场处理单元来实现模拟信即在控制对象附近放置现场处理单元来实现模拟信号的收发,而现场处理单元与子系统微机之间则通号的收发,而现场处理单元与子系统微机之间则通过过RS
4、-485等网络进行数据交换。等网络进行数据交换。 这种改造虽然起到了一定的效果,但未能实现真正这种改造虽然起到了一定的效果,但未能实现真正意义上的全分布式控制,而且各公司所研制控制网意义上的全分布式控制,而且各公司所研制控制网络的封闭性,也阻碍了船用现场控制设备间互换与络的封闭性,也阻碍了船用现场控制设备间互换与互操作的实现。互操作的实现。 进入进入20世纪世纪90年代后,随着现场总线技术的不断完年代后,随着现场总线技术的不断完善,在新造船舶中,越来越多地善,在新造船舶中,越来越多地采用现场总线作为采用现场总线作为各个子系统的内部控制网络,上层网络采用局域网,各个子系统的内部控制网络,上层网络
5、采用局域网,形成全分布式的网络型监控系统。形成全分布式的网络型监控系统。现场总线现场总线(FIELD BUS) 网络型系统当前的最新发展:现场总线系统网络型系统当前的最新发展:现场总线系统(FCS)。)。 FCS的主要优点:用可靠的数字信号取代模拟信号的主要优点:用可靠的数字信号取代模拟信号(420mA电流信号),把控制、报警、计算等功电流信号),把控制、报警、计算等功能分散到系统最底层的现场传感器,实现彻底的分能分散到系统最底层的现场传感器,实现彻底的分散控制,从而也可以节省大量的硬件和信号电缆,散控制,从而也可以节省大量的硬件和信号电缆,真正实现全数字、全分散和全开放的现场控制系统。真正实
6、现全数字、全分散和全开放的现场控制系统。 机舱中采用的有代表性的现场总线:机舱中采用的有代表性的现场总线:CAN、LONWORKS、PROFIBUS、CC-LINK等。等。 现场总线技术实际上是采用现场总线技术实际上是采用串行数据传输和连接串行数据传输和连接方式方式代替传统的并联信号传输和连接方式。代替传统的并联信号传输和连接方式。DCSFCS二、二、K-CHIEF 500系统的组成系统的组成 DATACHIEF C20系统系统 C A N W.CallEthernetC A N line 2EthernetDistributedProcessing UnitCommissioning too
7、l LOSLocal OperatorStation (LOS)ROS / GW no.1ROS / GW no.2ROSROS LOSLocal OperatorStation (LOS) WBU WCU WCU WCU WCUWatch Calling systemC A N line 1Distributed Processing systemDistributedProcessing UnitDistributedProcessing UnitDistributedProcessing UnitDistributedProcessing Unit K-CHIEF 500系统的性质:系统
8、的性质: 采用采用CAN现场总线网和现场总线网和Ethernet网的网网的网络型机舱监视报警和控制系统络型机舱监视报警和控制系统 。 系统的主要组成单元:系统的主要组成单元: 分布式处理单元分布式处理单元DPU; 现场操作站现场操作站 MOS; 操作站操作站OS(远程操作站(远程操作站ROS );); CAN现场总线网、现场总线网、Ethernet网和网关单网和网关单元(元(SGW和和dPSC);); 值班呼叫单元(延伸报警单元)值班呼叫单元(延伸报警单元)WBU、WCU。 K-chief 500系统的基本工作原理系统的基本工作原理 通过通过DPU单元实现分散的监视或控制,再通过操作单元实现分
9、散的监视或控制,再通过操作站站OS实现集中管理和操作。实现集中管理和操作。 CAN现场总线与以太网组成的双网络系统各自采用现场总线与以太网组成的双网络系统各自采用双冗余方案。双冗余方案。CAN网主要用于网主要用于现场信息的采集、转现场信息的采集、转换和控制换和控制。CAN总线分成总线分成Local和和Global两个分段,两个分段,两个分段各自又是双冗余的。两个分段各自又是双冗余的。Ethernet网是高速网,网是高速网,负责负责系统信息的管理,系统信息的管理,OS之间的数据传送借助于之间的数据传送借助于Ethernet网进行。网进行。 系统网关(系统网关(SGW)用来使)用来使CAN和和Et
10、hernet两种不同两种不同的网络实现互联;的网络实现互联;dPSC用来实现同一用来实现同一CAN网中分段网中分段总线(如总线(如Local CAN和和Global CAN )间的通信。)间的通信。三、三、k-chief 500系统的主要功能系统的主要功能 可以根据需要选择系统功能,组成基本的报警监视系可以根据需要选择系统功能,组成基本的报警监视系统直至集报警监视、控制功能于一体的综合系统。统直至集报警监视、控制功能于一体的综合系统。 主要的控制功能:主要的控制功能:备用泵的控制、阀门遥控、备用泵的控制、阀门遥控、PID控控制器、电站功率管理、压载水控制、空压机控制、空制器、电站功率管理、压载
11、水控制、空压机控制、空调控制、分油机控制、辅锅炉控制、冷藏箱监视、火调控制、分油机控制、辅锅炉控制、冷藏箱监视、火灾报警等。灾报警等。 主要的监视与报警功能:主要的监视与报警功能: 1、报警和监视显示;、报警和监视显示; 2、过程模拟图、过程模拟图、BAR图图和趋势曲线;和趋势曲线; 3、打印记录;、打印记录; 4、自检和故障诊断。、自检和故障诊断。四、分布式处理单元四、分布式处理单元DPU(DISTRIBUTED PROCESSING UNIT) DPU是采用模块化设计、具有通信功是采用模块化设计、具有通信功能的智能化远程能的智能化远程I/O单元,单元, 以单片机作为以单片机作为微处理器,是
12、系统的核心单元。微处理器,是系统的核心单元。 DPU的主要功能:的主要功能: DPU单元直接与传感器和执行器连单元直接与传感器和执行器连接,独立实现参数的监视、报警和控制;接,独立实现参数的监视、报警和控制; 对来自传感器的信号进行处理和监对来自传感器的信号进行处理和监视,向外设输出模拟量和开关量控制信号。视,向外设输出模拟量和开关量控制信号。 DPU用双芯屏蔽电缆(或双绞线)用双芯屏蔽电缆(或双绞线)连接到冗余的连接到冗余的CAN总线上,与总线上,与OS和和MOS进行数据通信。进行数据通信。 DPU单元单元(DISTRIBUTED PROCESSING UNIT) 1、DPU模块的类型模块的
13、类型 DPU有模拟量输入、热电偶输入、模拟量有模拟量输入、热电偶输入、模拟量输出、数字量输入、数字量输出模块或输输出、数字量输入、数字量输出模块或输入输出混合模块(入输出混合模块(RIO C1C4,用于电站,用于电站系统)等各种类型,可以根据需要选用。系统)等各种类型,可以根据需要选用。通道数为(通道数为(832)。)。 10通道热电偶输入模块通道热电偶输入模块 RAI-10tC16通道开关量输出模块通道开关量输出模块 RDO-16混合输入输出模块混合输入输出模块RIO-C1 模拟量输入:模拟量输入:2个个AC电压输入;电压输入;1个个AC电流输入;电流输入;4个通用输入信号。个通用输入信号。
14、 模拟量输出:模拟量输出:2个电流输出。个电流输出。 开关量:开关量: 6个输出通道;个输出通道;4个输入通道;个输入通道;2个传感器探头输入通道。个传感器探头输入通道。 发电机监控模块发电机监控模块RIO-C4RIO-C1:电站系统的开关量、模拟量输入输出信号处理。RIO-C2:电站系统的开关量输入输出信号处理。RIO-C3:用于发电机安全保护。RIO-C4: RIO-C1 的升级换代产品。2、DPU模块的主要特点模块的主要特点 (1)能独立完成参数的监视、报警和控制。所)能独立完成参数的监视、报警和控制。所有的数据采集、过程控制都能在每个独立的有的数据采集、过程控制都能在每个独立的DPU上
15、进行,因而即使上进行,因而即使OS失效,局部操作仍然失效,局部操作仍然有效。有效。 (2)完备的通信功能,这是)完备的通信功能,这是DPU和普通和普通I/O单单元最大的不同之处。元最大的不同之处。DPU单元配备有双单元配备有双CAN总总线接口,线接口,DPU单元之间通过冗余的单元之间通过冗余的CAN总线进总线进行通信。行通信。DPU还配备一个还配备一个RS422或或RS485串行接串行接口,以便和其它外部设备进行通信。口,以便和其它外部设备进行通信。 (3)用于)用于DPU硬件组态和编程所需的软件可以硬件组态和编程所需的软件可以从从OS下载并永久性地储存在下载并永久性地储存在DPU的的EEPR
16、OM中,中,可以在可以在OS上对上对DPU进行遥控组态。进行遥控组态。 在在OS和和MOS上,可以实现对上,可以实现对DPU的监视、的监视、控制和参数调整。控制和参数调整。 (4)所有的)所有的DPU模块均用模块均用24V DC电源供电。电源供电。模块采用单块印刷电路板设计,模块采用单块印刷电路板设计,DPU模块的硬模块的硬件没有任何附加部件,无须设定微型电位器、件没有任何附加部件,无须设定微型电位器、DIP开关、跳线或插座。开关、跳线或插座。DPU模块的主要特点(续)模块的主要特点(续) (5)电源、)电源、I/O通道与通信总线连接采用电气通道与通信总线连接采用电气隔离。隔离。 (6)具有强
17、大的自检功能。若模块内部温度、)具有强大的自检功能。若模块内部温度、存储器性能、存储器性能、CAN总线状态、电缆或传感器有总线状态、电缆或传感器有异常,则会产生报警以提醒值班人员。异常,则会产生报警以提醒值班人员。 (7)故障)故障DPU的更换可以在系统不断电的情的更换可以在系统不断电的情况下进行,在更换况下进行,在更换DPU模块后,需要在模块后,需要在OS上将上将参数下载给新模块。参数下载给新模块。DPU模块的主要特点(续)模块的主要特点(续)五、操作站五、操作站OS 1、组成和功能、组成和功能 组成:标准组成:标准PCPC微机、操作控制面板微机、操作控制面板CRPCRP、触摸屏、触摸屏TC
18、P TCP 、显示器和打印机等。、显示器和打印机等。 OSOS通常位于集控室,驾驶台、货油控制室、船舶通常位于集控室,驾驶台、货油控制室、船舶办公室等场所也可以配备办公室等场所也可以配备OSOS,各,各OSOS之间通过双之间通过双冗余的冗余的EthernetEthernet网相连。网相连。 OSOS通过通过CANCAN总线接受总线接受DPUDPU单元送出的现场信息,单元送出的现场信息,并可向并可向DPUDPU发送指令、参数和程序。发送指令、参数和程序。OSOS可以监可以监控每个连接到控每个连接到CANCAN上的上的DPUDPU的通信,并对的通信,并对DPUDPU的的所有数据进行备份。所有数据进
19、行备份。TCP (Touch Control Panel )CRP (Control Room Panel)控制室操作面板控制室操作面板 CRP OS的主要功能的主要功能 (1)通过)通过CAN总线和总线和DPU单元进行双向数单元进行双向数据传送,即从据传送,即从DPU接收数据或向接收数据或向DPU传送指传送指令、数据和程序;令、数据和程序; (2)报警信息的显示、监测及应答;)报警信息的显示、监测及应答; (3)将报警信息延伸送到驾驶台和值班轮)将报警信息延伸送到驾驶台和值班轮机员房间;机员房间; (4)作为)作为CAN网络和网络和Ethernet网之间的网网之间的网关。关。 OS的其它功能
20、的其它功能 OS可以作为系统的数据库。用于可以作为系统的数据库。用于OS和不同和不同DPU的软件储存在的软件储存在OS的的PC机中。机中。在在OS上,上,可以修改报警限值和系统参数,在一个可以修改报警限值和系统参数,在一个OS上进行的修改将会自动地刷新其它所有的上进行的修改将会自动地刷新其它所有的OS。 当现场变量或状态发生变化时,当现场变量或状态发生变化时,DPU将刷将刷新每个新每个OS中的数据库,这就意味着在任何中的数据库,这就意味着在任何一个一个OS上显示的数据总是最新的。上显示的数据总是最新的。 在在OS上可以进行驾驶台和集控室之间的值上可以进行驾驶台和集控室之间的值班转换以及轮机员呼
21、叫。班转换以及轮机员呼叫。Mimics 图 ME OVERVIEWDG OVERVIEWSYSTEM OVERVIEW.MIMIC图用于过程监测图用于过程监测/控制的模拟图显示。控制的模拟图显示。DC C20系统系统 DC C20系统与系统与K-CHIEF500系统的硬件结构、系统系统的硬件结构、系统功能基本相同,但两者在操作站的操作面板上有较功能基本相同,但两者在操作站的操作面板上有较大区别。大区别。 遥控操作站遥控操作站ROS:由计算机、显示器、打印机、操:由计算机、显示器、打印机、操作控制屏等组成。作控制屏等组成。 操作控制屏操作控制屏OCP(OPERATOR CONTROL PANEL
22、) OCP是一个是一个专用键盘专用键盘,用按钮和指示灯的结合,用按钮和指示灯的结合实现系统的报警和状态指示以及基本操作,并与外实现系统的报警和状态指示以及基本操作,并与外部消声按钮相连。部消声按钮相连。远程操作站远程操作站ROSDATA CHIEF C20 系统系统Alarm Groups 报警分组报警分组 LO, FO, FW, EX, CW, CA, DO, BW, MI, DS, BO, BR, OM, DG, SG, ES, FI, TS, ST, LS.: 系统所监测的报警点被分为不同的组(系统所监测的报警点被分为不同的组(128组),组),当某点报警时,相应的指示灯和显示器上相应的
23、文当某点报警时,相应的指示灯和显示器上相应的文字或符号会闪烁,同时报警蜂鸣器鸣叫。按下该按字或符号会闪烁,同时报警蜂鸣器鸣叫。按下该按钮可显示该组内的活动报警。当该组内所有报警都钮可显示该组内的活动报警。当该组内所有报警都被应答确认后,指示灯转为常亮,所有报警点状态被应答确认后,指示灯转为常亮,所有报警点状态恢复正常后指示灯熄灭。恢复正常后指示灯熄灭。 MOS是一个专门设计的操作屏,可以方便地使是一个专门设计的操作屏,可以方便地使用操作员功能。用操作员功能。MOS可以用作为局部的或主要可以用作为局部的或主要的操作员站。的操作员站。六、现场工作站(就地操作站)六、现场工作站(就地操作站) Mid
24、i Operator Station (MOS) MOS通常位于机舱,可以实现:通常位于机舱,可以实现: (1)检查)检查DPU处理的过程变量;处理的过程变量; (2)就地操作设备;)就地操作设备; (3)模拟)模拟DPU的输入的输入/输出信号;输出信号; (4)调整)调整DPU的参数。的参数。 MOS可以与所有和其一起连接到同一段可以与所有和其一起连接到同一段CAN总线总线上的上的DPU单元相连。在单元相连。在MOS上,操作者可以选择并控上,操作者可以选择并控制所选择的制所选择的DPU。 如果由于通信中断或如果由于通信中断或OS出现严重故障等原因使得出现严重故障等原因使得一个一个DPU与系统
25、的其它部分隔离,可以在与系统的其它部分隔离,可以在MOS上就地上就地获得所有必要的报警和监视功能。获得所有必要的报警和监视功能。 在在K-CHIEF500系统中,用系统中,用MOS 代代替替LOS。 MOS安装在安装在DPU箱的面板上箱的面板上MOS七、值班呼叫系统(延伸报警单元七、值班呼叫系统(延伸报警单元 ) 驾驶台值班单元(驾驶台值班单元(WBU) 舱室值班单元舱室值班单元 (WCU) 实现延伸报警、人员呼叫和无人机舱值班交实现延伸报警、人员呼叫和无人机舱值班交接等功能。接等功能。 1、WBU及功能及功能 显示值班责任岗位(驾驶台还是集控室);显示值班责任岗位(驾驶台还是集控室); 显示
26、值班者;显示值班者; 显示当前报警状态;显示当前报警状态; 当值班交接和有报警时,蜂鸣器会鸣叫;当值班交接和有报警时,蜂鸣器会鸣叫; 呼叫值班员。呼叫值班员。2、舱室值班单元、舱室值班单元(Watch Cabin Unit WCU)WCU单元有单元有LED式和式和LCD式两种,式两种,LED式可有式可有17个报个报警分组,警分组,LCD式只有式只有6个报警分组。个报警分组。WCU、WBU的功的功能和操作方法基本相同。能和操作方法基本相同。设定驾驶台值班模式时,必须安排轮机员待命。如果报设定驾驶台值班模式时,必须安排轮机员待命。如果报警发生,在值班轮机员的住所和公共场所,就会有报警警发生,在值班
27、轮机员的住所和公共场所,就会有报警信号。信号。WCU上的蜂鸣器鸣响,一个或一组指示灯闪光,上的蜂鸣器鸣响,一个或一组指示灯闪光,轮机员应该去集控室查找故障原因。当集控室进行了报轮机员应该去集控室查找故障原因。当集控室进行了报警应答或清除了报警后,在警应答或清除了报警后,在WCU上也将清除报警。如上也将清除报警。如果轮机员在规定时间内未进行应答操作,值班轮机员住果轮机员在规定时间内未进行应答操作,值班轮机员住所、驾驶台会重新出现报警,直到报警被应答。所、驾驶台会重新出现报警,直到报警被应答。WCU也可以用来呼叫轮机员到驾驶台或集控室。也可以用来呼叫轮机员到驾驶台或集控室。八、系统通信八、系统通信
28、 1、CAN现场总线现场总线 CAN是控制器区域网(是控制器区域网(CONTROLER AREA NET)的简称,特别适用于分布式系统。的简称,特别适用于分布式系统。CAN的信号传输介的信号传输介质为双绞线、同轴电缆或光纤等,通信速率最高可达质为双绞线、同轴电缆或光纤等,通信速率最高可达1Mbps/500m,总线上最多可挂接,总线上最多可挂接110个设备。在系统中个设备。在系统中主要用于主要用于现场信息的采集、转换和控制现场信息的采集、转换和控制。 2、局域网、局域网LAN 系统局域网采用系统局域网采用Ethernet网,在系统中负责网,在系统中负责操作站操作站OS之间的数据传送,之间的数据传
29、送,传输速率为传输速率为10Mbps。LAN网的传网的传输介质与传输距离有关,传输距离在输介质与传输距离有关,传输距离在100m内,可以采内,可以采用用2对五类双绞屏蔽电缆对五类双绞屏蔽电缆STP;若超过;若超过100m,则可采用,则可采用光纤实现光纤实现HUBHUB的传输方案的传输方案。3、网关单元 系统的两种网关:系统网关系统的两种网关:系统网关SGW; 双分段处理控制器双分段处理控制器dPSC。 SGW用作用作CAN总线和总线和LAN之间的网关,之间的网关, dPSC则用作连接两个则用作连接两个CAN分段的网关。分段的网关。 (1)系统网关)系统网关SGW SGW是一个连接是一个连接CAN总线网和总线网和Ethernet网网的四通道网关。的四通道网关。Global CAN总线与总线与SGW相连,相连,实现实现CAN与与Ethernet之间的冗余连接,使之间的冗余连接,使DPU和和OS之间实现数据的双向传送。之间实现数据的双向传送。(2)双分段处理控制器)双分段处理控制器dPSC dPSC是一个双重二通道的是一个双重二通道的CAN网关,拥有两个单网关,拥有两个单独供电的处理器,每个处理器有两个
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 不锈钢栏杆工程施工合同书
- 精准农业设备租赁及服务合同
- 专业培训机构线上培训服务合同
- 劳动合同范本保密
- 私企买房合同范本
- 2025年装运乱石租船合同
- 春季开学安全教育主题班会
- (8)-小学文言文阅读训练 70 篇
- 钩机施工合同范本
- 布料釆购合同范本
- 安全事故案例图片合集事故警示
- 正确认识汽车太阳膜课件
- 工程建筑给排水外文文献翻译1
- 曲线上梁的平分中矢坐标计算方法解读
- DB4201∕T 646-2021 轨道交通工程运营期结构监测技术规程
- 200句话搞定上海中考单词(精华版)
- 船舶辅锅炉的自动控制系统分析
- 49000DWT江海直达成品油船设计
- 第三章第四节2--厚壁圆筒-应力
- 建设工程监理费计算器
- 合成宝石特征x
评论
0/150
提交评论