



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、肇庆市技师学院ABBa/-J-3ABB 机器人的手动操作3.1 任务目标Ø 掌握手动操作机器人运动的三种模式。Ø 使用“增量”模式来控制机器人的运动。Ø 熟练使用手动操纵的快捷方式。Ø 掌握 ABB 机器人转数计数器更新操作。3.2 任务描述手动操纵机器人运动一共有三种模式:单轴运动、线性运动和重定位运动。如何使用这三种模式手动 操作机器人运动是项目的主要内容。建立一个工作站,ABB 型号为 IRB120,Y 轴上建模长方体,长 200mm,宽 200mm,高 400mm,在长方 体的内角上进行重定位运动,之后恢复到机械远点。(手动操作练习需要教师指导,
2、同时需要上机练习)3.3 知识储备3.3.1 手动操作三种模式1.单轴运动一般地,ABB 机器人是由六个伺服电动机分别驱动机器人的六个关节轴,那么每次手动操纵一个关节轴 的运动,就称之为单轴运动。2.线性运动图 2IRB 120 机器人的关节轴机器人的线性运动是指安装在机器人第六轴法兰盘上工具的 TCP 在空间中作线性运动。3.重定位运动机器人的重定位运动是指机器人第六轴法兰盘上的工具 TCP 点在空间中绕着坐标轴旋转的运动,也可 以理解为机器人绕着工具 TCP 点作姿态调整的运动。3.3.2RobotStudio 中的建模功能当使用 RobotStudio 进行机器人的仿真验证时,如节拍、到
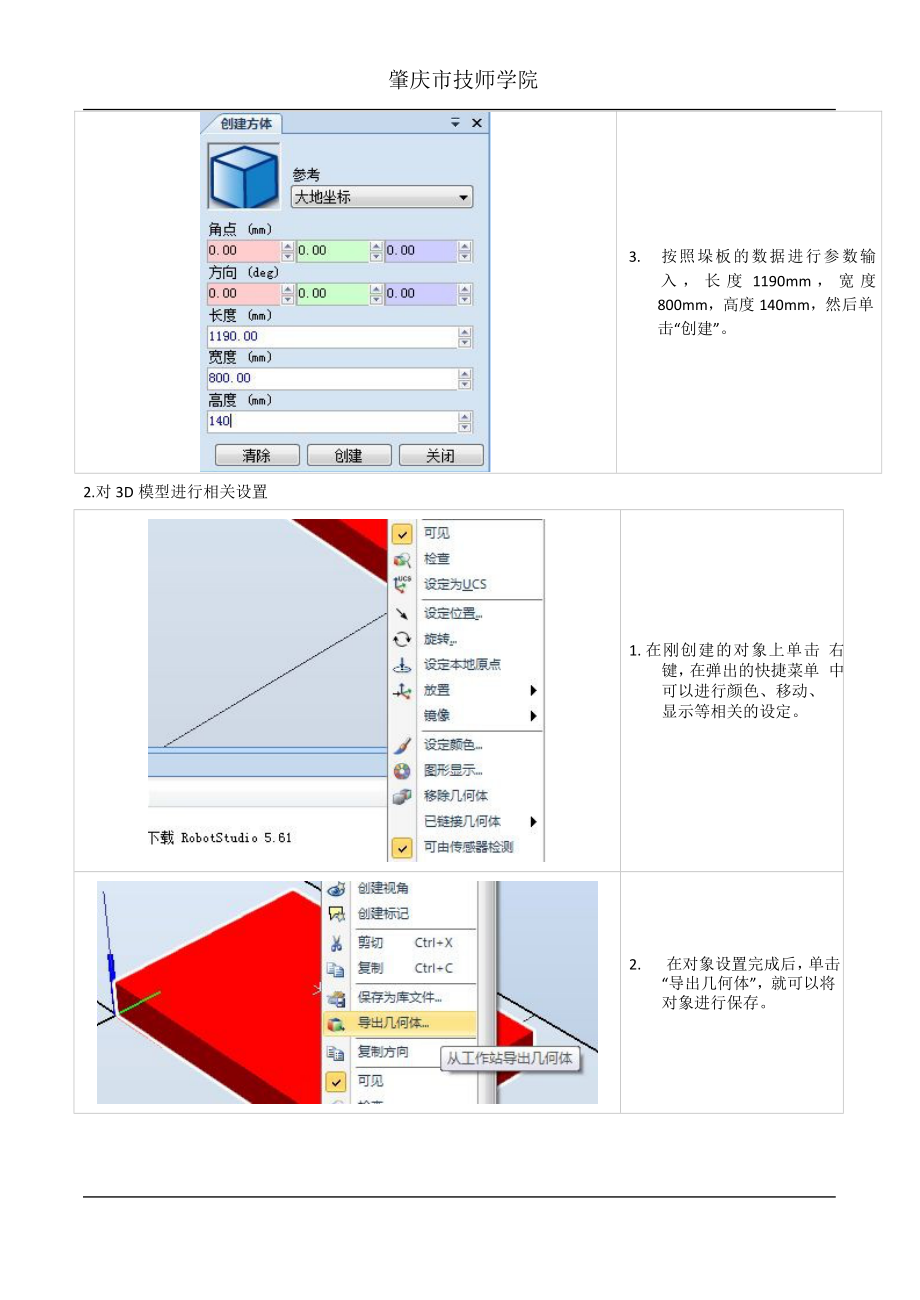
3、达能力等,如果对周边模型要求不是非常细 致的表述时,可以用简单的等同实际大小的基本模型进行代替,从而节约仿真验证的时间。如果需要精细的 3D 模型,可以通过第三方的建模软件进行建模,并通过*.sat 格式导入到 RobotStudio中来完成建模布局的工作。1.使用 RobotStudio 建模功能进行 3D 模型的创建1.单击“新建”菜单命令组,创建 一个新的空工作站。2. 在“建模”功能选项卡中,单击 “创建”组中的“固体”菜单,选择 “矩形体”。肇庆市技师学院3.按照垛板的数据进行参 数输入 , 长 度 1190mm , 宽 度800mm,高度 140mm,然后单 击“创建”。2.对 3
4、D 模型进行相关设置1. 在刚创建的对象上单击 右键,在弹出的快捷菜单 中可以进行颜色、移动、 显示等相关的设定。2. 在对象设置完成后,单击 “导出几何体”,就可以将 对象进行保存。3.4 任务实施3.4.1 单轴运动的手动操纵电源总开关 急停开关通电复位 机器人状态1. 将 控 制 柜 上 机 器 人 状 态 钥 匙 切 换 到 中 间 的 手动限速状态。2.在状态栏中,确认 机 器 人 的 状 态已切换为“手 动”。3.ABB 菜单中,选 择“手动操纵”。4.单 击 “ 动 作 模 式”。5.选中“轴 1-3”,然 后 单 击 “ 确 定 ”(选中“轴 4-6”, 就 可 以 操 纵 轴
5、4-6)。6.用 左 手 按 下 使能按钮,进入“电 动机开启”状态,在状态栏中,确认“电动机开启”状态。7.此 处 显 示 “ 轴1-3”的操纵杆方 向。黄箭头代表 正方向。*操纵杆的使用 技巧:可以将机器人 的操纵杆比作汽车 的节气门,操纵杆的 操纵幅度是与机器人的运动速度相关 的。操纵幅度较小, 则机器人运动速度 较慢。操纵幅度较大, 则机器人运动速度 较快。所以在操作时, 尽量以小幅度操纵 使机器人慢慢运动。3.4.2 线性运动1.“手动操纵”-“动作模式” 界 面 中 选 择 “线性”,然 后 单 击 “ 确 定”。2.单击“工具 坐标”。*机器人的线性 运动要在“工具 坐标”中指定
6、对 应的工具。肇庆市技师学院3. 选 中 对 应 的工具(工 具 数 据 的 建立,参见 程 序 数 据 内容)。4.用 左 手 按下 使 能 按 钮,进入“电动 机开 启 ”状态,在状 态栏中,确认“ 电 动机 开启”状态。5. 此 处 显 示 轴 X、Y、Z 的 操 纵 杆 方向。黄箭 头 代 表 正 方向。3.4.3 重定位运动6. 操 作 示 教 器 上 的 操 纵杆,工具 的 TCP 点在 空 间 中 作 线性运动。1.“ 手 动 操纵 ”-“ 动 作 模 式” 界 面 中,选中“重 定位”,然后 单 击 “ 确 定”。2.单 击“ 坐 标 系”。3. 选 中 “ 工 具”,然后单
7、击“确定”。4.单 击“ 工 具 坐标”。5. 选 中 正 在 使 用 的 工 具,然后单 击“确定”。6.用 左 手 按下 使 能 按 钮,进入“电动 机开 启 ”状态,在状 态栏中,确认“ 电 动机 开启”状态。7. 此 处 显 示 X、Y、Z 的 操 纵 杆 方 向。黄箭头 代 表 正 方 向。3.4.4 增量模式控制机器人运动8. 操 纵 示 教 器 上 的 操 纵杆,机器 人 绕 着 工 具 TCP 点作 姿 态 调 整 的运动。如果对使用操纵杆通过位移幅度来控制机器人运动的速度不熟练的话。那么可以使用“增量”模式来控制机器人的运动。 在增量模式下,操纵杆每位移一次,机器人就移动一步
8、。如果操纵杆持续一秒或数秒钟,机器人就会持续移动(速率为 10 步/s)。1.“ 手动操纵” 界面中,选中“ 增量”。2.根 据 需 要 选 择 增 量 的 移 动 距离,然后单击“确定”。增量移动距离Mm角度°小0.050.005中10.02大50.2用户自定义自定义3.5 知识链接3.5.1 手动操纵的快捷方式1.手动操纵的快捷按钮标号说明A机器人/外轴的切换B线性运动/重定位运动的切换C关节运动轴 1-3/轴 4-6 的切换D增量开/关A B C D2.手动操纵的快捷菜单1.单击此快捷菜单按 钮。2.单击“ 手动操纵” 按 钮。3.单击“ 显示详情” 展 开菜单。4.界面说明:
9、标 号说明A选择当前使用 的工具数据B选择当前使用 的工件坐标C操纵杆速率D增量开/关E碰撞监控开/关F坐标系选择G动作模式选择5. 单击“ 增量模式” 按 钮,选择需要的增 量。6. 自定义增量值的方 法 : 选 择 “ 用 户 模 块”,然后单击“显示 值”就可以进行增量 值的自定义了。3.5.2ABB 机器人转数计数器更新操作ABB 机器人六个关节轴都有一个机械原点的位置。 在以下的情况,需要对机械原点的位置进行转数计数器的更新操作:1)更换伺服电动机转数计数器电池后。2)当转数计数器发生故障,修复后。3)转数计数器与测量板之间断开过以后。4)断电后,机器人关节轴发生了移动。5)当系统报
10、警提示“10036 转数计数器未更新”时。1. 机 器 人 六 个 关 节 轴 的 机 械 原 点刻度示意图。提示:使用手动 操纵让机器人各关 节轴运动到机械原 点刻度位置的顺序 是:4-5-6-1-2-3。注意:各个型号的机器人机械原点 刻度位置会有所不 同,请参考 ABB 随 机光盘说明书。2.在 手 动 操 纵 菜 单中,选择“轴4-6”动作模式, 将 关 节 4 运 动到 机 械 原 点 的刻度位置。3.在 手 动 操 纵 菜单中,选择“轴4-6”动作模式, 将 关 节 轴 5 运动 到 机 械 原 点的刻度位置。4.在 手 动 操 纵 菜 单中,选择“轴4-6”动作模式, 将 关 节
11、 轴 6 运 动 到 机 械 原 点 的刻度位置。5.在 手 动 操 纵 菜单中,选择“轴1-3”动作模式, 将 关 节 轴 1 运动 到 机 械 原 点的刻度位置。6.在 手 动 操 纵 菜 单中,选择“轴1-3”动作模式, 将 关 节 轴 2 运动 到 机 械 原 点的刻度位置。7.在 手 动 操 纵 菜 单中,选择“轴1-3”动作模式, 将 关 节 轴 3 运动 到 原 点 的 刻度位置。8.ABB 菜单中,选 择“校准”。9.单击“ROB_1”。10. 选 择 “ 校 准 参 数”。11. 选择“编辑电动 机校准偏移”。12. 将 机 器 人 本 体 上 电 动 机 校 准偏 移 记
12、录 下 来( 位 于 机 器 人 机身)。13. 单击“是”。14. 输 入 刚 才 从 机 器 人 本 体 记 录 的 电 动 机 校 准 偏移数据,然后 单击“确定”。 如 果 示 教 器 中 显 示 的 数 据 与 机 器 人 本 体 上 的 标 签 数 据 一 致 , 则 无 需 修 改 , 直 接 单 击 “取消”退出, 跳到第 18 步。15. 确定修改后,在 弹 出 的 重 启 对 话 框 中 单 击 “是”。16. 重启后,ABB 菜 单 中 选 择 “ 校 准”。17. 单击“ROB_1”。18. 选择“更新转数 计数器”。19. 单击“是”。20. 单击“全选”, 然 后
13、单 击 “ 更 新”。(如果机器 人 由 于 安 装 位 置的关系,无法 六 个 轴 同 时 到 达 机 械 原 点 刻 度位置,则可以 逐 一 对 关 节 轴 进 行 转 数 计 数 器更新)21. 单击“更新”。3.5.3RobotStudio 中测量工具的使用1.单击“选择部件”。2.单击“捕捉末端”。3.在“建模”选项卡中,单击“点 到点”。4.单击 A 角点。5.单击 B 角点。6.垛板长度的测量结果就显示 在这里。(1)测量垛板的长度(2)测量锥体的角度22. 操作完成后,转 数 计 数 器 更 新 完成。1.在“建模”功能选项卡中,单击“角度”。2.单击 A 角点。3.单击 B 角点。4.单击 C 角点。5.椎体顶角角度的测量结果就显 示在这里。(3)测量圆柱体的直径1.单击“捕捉边缘”。2.在“ 建模” 功能选项卡中
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 2025年哈尔滨传媒职业学院单招职业适应性测试题库含答案
- 品牌管理全套试卷四复习测试题
- 科技教育中的绿色课堂构建
- 印度合同范本
- 2025年云南省建筑安全员C证(专职安全员)考试题库
- 电子文件中规范处理技巧与格式规范例如Office办公环境
- 幼儿园中班元旦活动策划方案范文
- 2025年抚州职业技术学院单招职业技能测试题库含答案
- 计算机辅助设计Iphotoshop知到智慧树章节测试课后答案2024年秋齐齐哈尔工程学院
- 2025年河北省唐山市单招职业倾向性测试题库含答案
- 2024年度中国宠物行业研究报告
- 工业自动化控制系统升级与维护服务合同
- 定岗定编定员实施方案(5篇)
- 药品经营质量管理规范
- 爆破工程师培训
- 2024年云南省公务员考试《行测》真题及答案解析
- 教科版初中物理八年级下册知识梳理
- 《飞科电器公司盈利能力存在的问题及完善对策(7800字论文)》
- 零星维修工程项目施工方案1
- 楚辞离骚的原文全文完整注音版、拼音版标准翻译译文及注释
- 湖北省荆州市2024年七年级上学期期中数学试题【附答案】
评论
0/150
提交评论