



下载本文档
版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
飞思卡尔智能车设计方案一:项目名称:第五届飞思卡尔智能汽车。二:设计要求:参考飞思卡尔智能车竞赛基本要求。三:设计制作思路为了用单片机系统实现小车智能控制,本设计以MC9S12DG128为核心,附以外围电路,将摄像头传感器得到的图像信息进行综合判别和处理,并通过速度传感器获得当前车辆速度,然后发出指令给电机驱动器(包括舵机和驱动电机),控制小车,从而使小车能够快速、准确地识别特定路线行驶。快速准确的图像分析处理、准确的实时速度控制、CPU的综合数据处理为小汽车实现自动加速、减速、限速、左转、右转提供了充分的保证。通过组装车模、传感器的选择与布置、系统电路板的设计与安装、仿真软件的制作、安装与调试以及控制算法的调试等等,首先使智能车运行起来,由低速逐渐向高速过渡。在实验的基础上不断发现问题,不断调试,不断解决问题,使智能车能够最大限度的沿着轨道快速、准确的行驶。1.路径识别系统软硬件设计方案:§道路寻找软件设计由于每行搜索的是最黑点,因此可以将黑点的阈值稍稍扩大一点,即使远方的黑白不清,由于找的是最黑点因此还是可以提取出真确的黑线的.它的主要问题是,不一定每行都有符合要求的点,会造成一行丢失而失去后面的黑点.解决的方法是当发现一行丢失以后,不立即退出搜索,而是置一个丢失计数器,只有当丢失计数器的值连续累加到一定的阈值后才退出.当每次搜索到一行的黑线后看看丢失计数器是否为非零.若不是,则说明前面没有丢失行.若是,则说明前面有几行丢失了.我们可以根据这一行与上以有效行对中间的丢失行对中间的丢失行做一个线性化处理.然后清零丢失计数器.有了丢失计数器,我们可以对赛道的提取条件加以严格的限制,而不必担心黑线的漏检.比如我们可以严格限制黑线的宽度,这样我们可以很容易滤除看到大块的黑斑带来的干扰;对于上述的斜看十字交叉线的问题我们只要根据上一行的黑线严格限制下一行黑线出现范围便可轻松滤除.当然在发现丢失行以后对于下一行的搜索必需加大黑线搜索的范围,允许的连续丢失行越多则再次找回的黑线的可信度也就越低,在实际的提取过程中必须把握好这一阈值,使得即可以顺利找到前方的道路,又不至于误提取黑线.实际证明这种方法实现简单,可靠性也最高,黑线提取十分稳定。软件设计框图如下:
§硬件设计:OV7620面阵数字式CMOS传感器OV7620是一款高集成度、中分辨率(640X480)、逐行/隔行扫描、彩色/黑白CMOS数字图像传感器芯片。它的数字视频口支持多种输出格式,输出帧频可于0.5到30帧/秒范围内编程。OV7620内部集成I2C总线兼容的SCCB(SerialCameraControlBus)接口,外部主机以此来操作芯片内部寄存器,对芯片的功能进行设置。次芯片可以有效地对赛道图像数据进行采集。先入先出FIFO缓冲器SN74V293SN74V293是64K深度18位高速同步先入先出缓冲器。该器件具有灵活的位宽配置(9位/18位),工作于9位宽度时,深度可达128K,同时具有6ns的低访问延迟。该器件十分适合应用于网络、视频、电信、数据通讯以及其他需要缓冲大量数据和进行总线匹配的场合。FIFO可以缓存一帧以上的图像数据。2:转向舵机控制软件设计方案及算法:§软件设计由于舵机的控制信号是一个脉宽调制信号,所以很方便和数字系统进行接口。只要能产生标准的控制信号的数字设备都可以用来控制舵机,比方PLC、单片机等。这里介绍利用单片机产生舵机的控制信号来进行控制的方法。考虑舵机对PWM信号的要求较高,为了提高精度,将单片机的8路8位的PWM输出调整为4路16位的PWM输出。舵机的转角是通过调整高电平的宽度来控制的。舵机的PWM周期为18ms〜20ms,两侧的极限位置的高电平宽度为1ms和2ms。晶振频率为12M,一个时钟周期为12个晶振周期,正好是1/1000ms,计数器每隔1/1000ms计一次数。以计数器1为例,先设定脉宽的初始值,在for循环中可以随时通过改变a值来改变脉宽,然后设定计数器计数初始值为a。当计数结束时,触发计数器溢出中断函数,就是voidtimer0(void)interrupt1using1,在子函数中,改变输出为反相(此时跳为低位),在用20000(代表20ms周期)减去高位用的时间a,就是本周期中低位的时间,c=20000-a,并设定此时的计数器初值为c,直到定时器再次产生溢出中断,重复上一过程。§舵机方向控制算法信号AD采集之后,进行阈值判断之后进行简单的路径算法,能够使单排分辨率达到30个以上,足以使小车平滑的转向形式。我们对舵机采用的是PD算法,即比例加微分算法。原因如下:比例算法在速度比较慢的时候,能产生很好的效果。但是在速度较快的时候,直道入弯道的时候转弯会来不及。因此加上D算法,记录以下先前一段时间的位置变化率,当直道入弯道的时候,位置变化会非常快,因此可以加大转向角,比单纯的P算法效果好很多。当然,记录的时间和D因子的参数调整是需要大量的时间和精力来调整的。3:电机驱动模块设计方案:
本队采用一些大功率管来驱动。譬如下面的电路,当然日后不一定会采用该电路,但是思想方法是一样的。电机驱动部分我们采用4片大功率MOS管IRF3205组成的H桥电路,以增强对电机的驱动能力桥式驱动电路的控制电路由ST微电子公司的TD340组成,大大简化了调速控制系统的硬件电路,而且具有单片机接口,可以很方便地与MC9S12DG256相连4■C36220nF±J_C3Jioi.E*22R2644■C36220nF±J_C3Jioi.E*22R264567PP28PP3910.FVbatOcsVoutCblResetHlCwdSIWdCb2StbyH2TempS2IniL2In2LlCfGnd234:整车运行控制系统设计方案及算法系统的基本软件流程为:首先,对各功能模块和控制参数进行初始化。然后,通过图像采集模块获取前方赛道的图像数据,同时通过速度传感器模块获取赛车的速度。采用PID对舵机进行反馈控制。另外根据检测到的速度,结合速度控制策略,对赛车速度不断进行适当调整,使赛车在符合比赛规则的前提下,沿赛道快速行驶。算法部分主要涉及到PID-PD控制算法和预判算法等。5:其他辅助系统软、硬件设计方案测速模块的设计与应用本系统速度检测模块采用了型旋转编码器作为车速检测元件(如:日本欧姆龙公司的E6A2-CWZ3C)。其精度达到车轮每旋转一周,产生360个脉冲,不仅硬件电路简
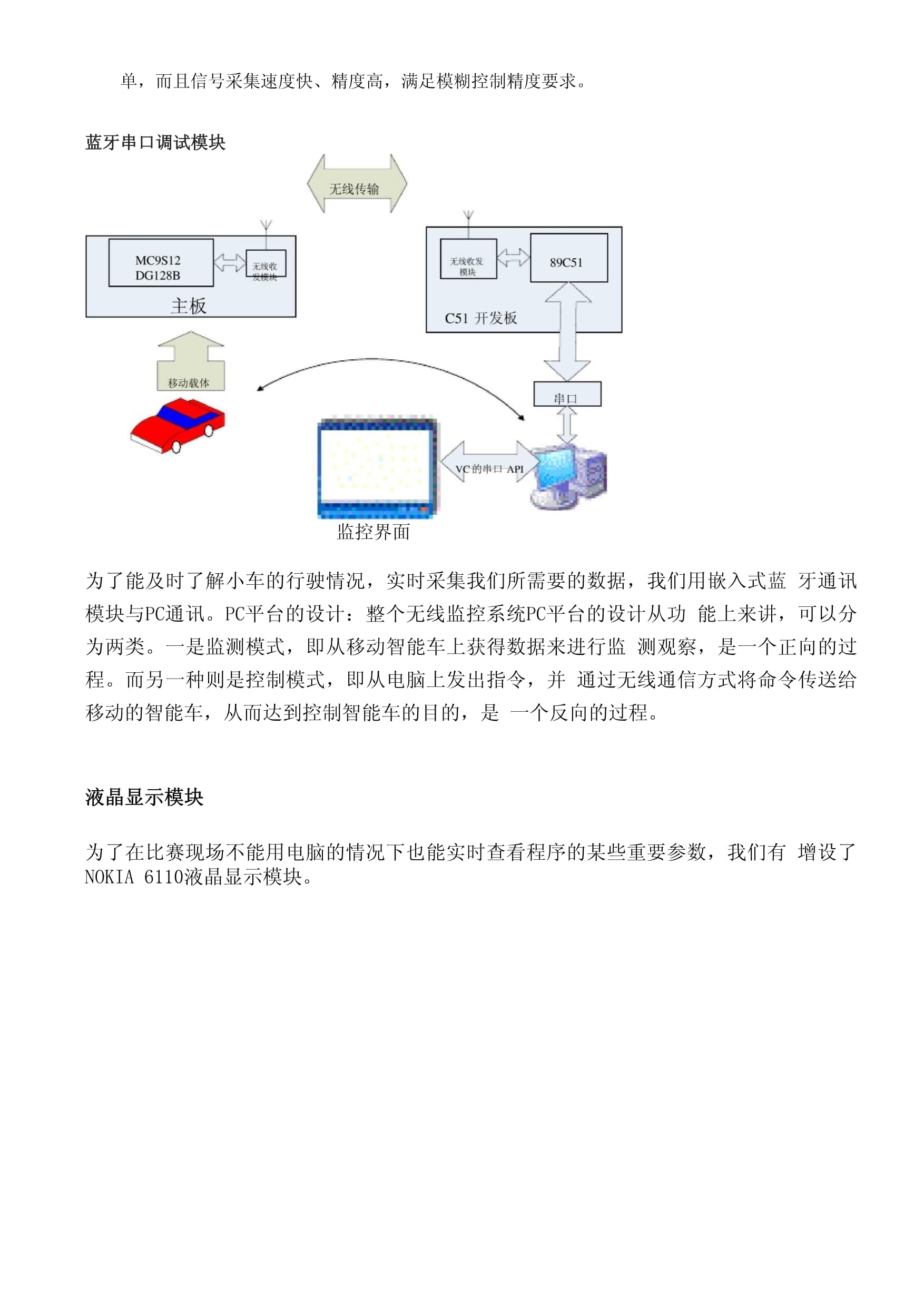
单,而且信号采集速度快、精度高,满足模糊控制精度要求。蓝牙串口调试模块监控界面为了能及时了解小车的行驶情况,实时采集我们所需要的数据,我们用嵌入式蓝牙通讯模块与PC通讯。PC平台的设计:整个无线监控系统PC平台的设计从功能上来讲,可以分为两类。一是监测模式,即从移动智能车上获
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 2026年交警考试题库带答案(新)
- 2026年湖北省宜昌市工程技术高、中级专业技术职务水平能力测试(测绘工程)模拟试题及答案
- 2026年妇女联合会招聘考试笔试试题(含答案)
- 2026年福建省社区工作者招聘考试试卷(含答案解析)
- 2025年中小学教师中级高级职称评定答辩题目(附答案)
- 2026跳槽税务面试题及答案
- 2026外贸面试题模板及答案
- 2026潍坊大企业面试题及答案
- 2026文旅类公考面试题及答案
- 2026武馆招聘面试题及答案解析
- 2025年八年级下册英语期末试卷及答案
- 北京市海淀区2024-2025学年八年级(下)期末数学试卷
- 四川省内江市2024-2025学年八年级下学期期末考试数学试卷(含答案)
- 侗歌弹唱教学课件下载
- 2025年上海市初中学业水平考试中考道德与法治真题试卷(真题+答案)
- 出血、血肿应急预案
- TCPAPE 01-2024 无菌药品生产污染控制策略技术指南
- 学习《吴军阅读与写作》 (50讲 )
- 《决胜B端:驱动数字化转型的产品经理》札记
- (正式版)SH∕T 3541-2024 石油化工泵组施工及验收规范
- 冶金物理化学课件
评论
0/150
提交评论