



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
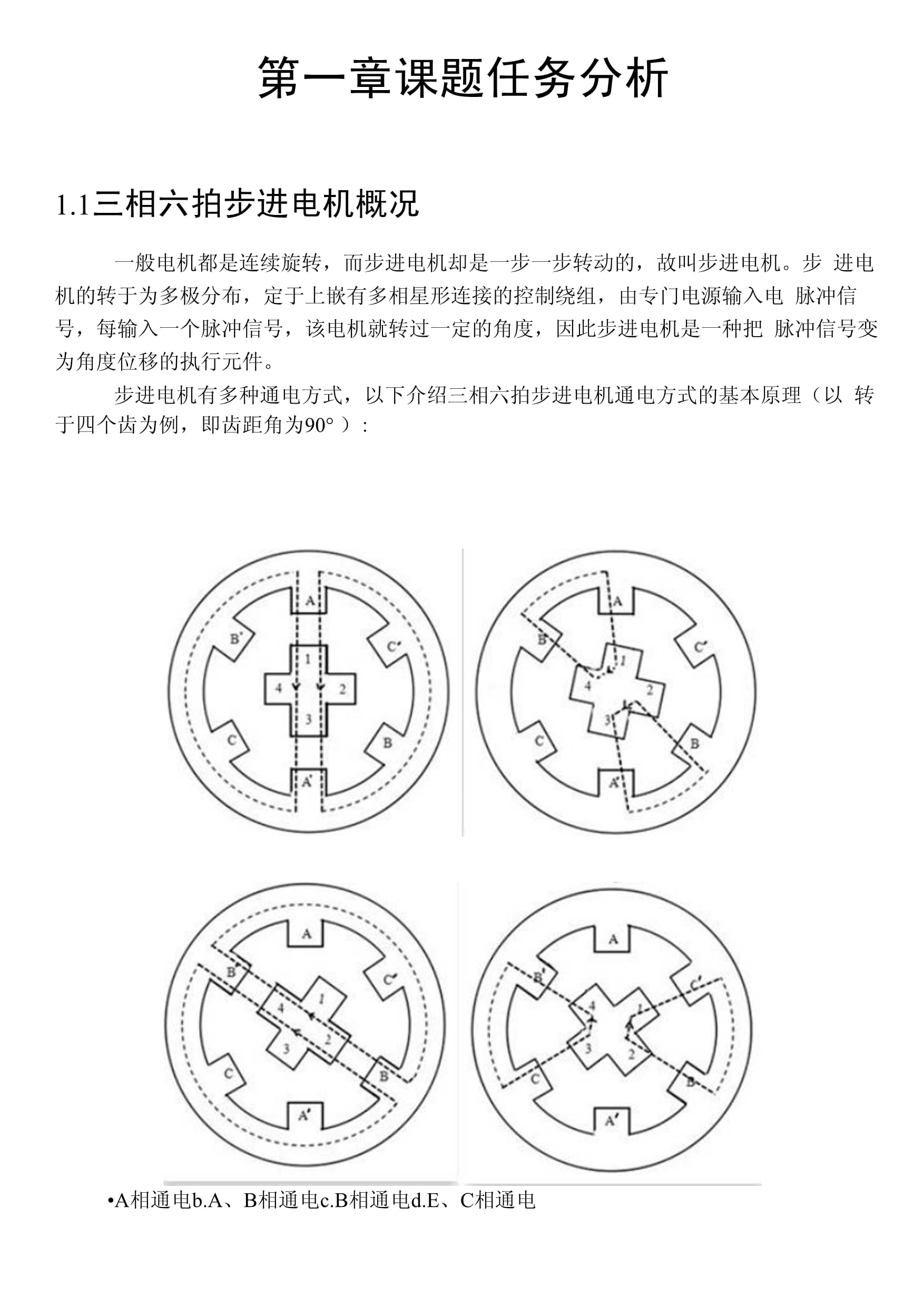
电先工程修院课程设计说明书设计题目:三相六拍步进电机PLC控制系统设计系别: 电气工程学院 年级专业: 应用电子 学号: 学生姓名: 指导教师:
电气工程学院《课程设计》任务书课程名称: 电气控制与PLC课程设计基层教学单位:电气工程及自动化系 指导教师:学号学生姓名专业班级设计题目三相六拍步进电机PLC控制系统设计设计技术参数采用PLC构成三相六拍步进电机的电气控制系统。控制要求查阅相关文献。设计要求1) 根据控制要求,进行电气控制系统硬件电路设计,包括PLC硬件配置电路。2) 根据控制要求,编制PLC控制程序3) 按要求编写设计说明书并绘制A1幅面图纸一张。参考资料1、 《PLC电气控制技术》 漆汉宏主编机械工业出版社20082、 图书馆各类期刊文献相关数据库3、 相关电气设计手册周次第一周第二周应完成内容完成全部方案设计:周一、二:査、阅相关参考资料周二至周五:方案设计周六、日:设计方案完善周一、二:完成设计说明书周三、四:绘制A1设计图纸周五:答辩考核指导教师签字基层教学单位主任签字说明:1、此表一式三份,系、学生各一份,报送院教务科一份。2、学生那份任务书要求装订到课程设计报告前面。电气工程学院教务科摘要步进电机广泛应用于数控机床,加工中心等各种自动化控制系统中,随着微电于和计算机技术的发展,步迸电机的需求量与曰俱增,在国民经济各个领域都有应用。PLC(可编程序控制器)是综合了计算机技术、自动控制技术和通信技术的一门新兴技术,是实现工业生产、科学研究以及其他各个领域自动化的重要手段之一,应用十分广泛,是现代工业控制的三大支柱之一。本设计是用PLC实现三相六拍步进电机驱动过程控制,使步进电机动作的抗干扰能力强、可靠性高,而且系统构成十分灵活,便于在线修改。关键词:步进电机PLC三相六拍目录TOC\o"1-5"\h\z\o"CurrentDocument"第一章课题任务分析 3\o"CurrentDocument"1.1三相六拍步进电机概况 3\o"CurrentDocument"1.2三相六拍步进电机的选择 4\o"CurrentDocument"1.3用PLC控制三相六拍步进电机的设计要求 5\o"CurrentDocument"第二章三相六拍步进电机的驱动控制 6\o"CurrentDocument"2.1驱动电源的组成 6\o"CurrentDocument"2.2驱动电源各部分简介 6\o"CurrentDocument"第三章硬件设计 8\o"CurrentDocument"3.1确定1/0点数及PLC机的选择 8\o"CurrentDocument"3.2控制系统的1/0口及地址分配 83.3I/O端于接线图 9\o"CurrentDocument"第四章软件设计 10\o"CurrentDocument"4.1.1转速的控制 10\o"CurrentDocument"4.1.2正反转控制 10\o"CurrentDocument"4.1.3状态转移图 124.1.4步进梯形图 134.1.5指令表 19\o"CurrentDocument"第五章心得体会 21\o"CurrentDocument"参考文献 22第一章课题任务分析1.1三相六拍步进电机概况一般电机都是连续旋转,而步进电机却是一步一步转动的,故叫步进电机。步进电机的转于为多极分布,定于上嵌有多相星形连接的控制绕组,由专门电源输入电脉冲信号,每输入一个脉冲信号,该电机就转过一定的角度,因此步进电机是一种把脉冲信号变为角度位移的执行元件。步进电机有多种通电方式,以下介绍三相六拍步进电机通电方式的基本原理(以转于四个齿为例,即齿距角为90°):•A相通电b.A、B相通电c.B相通电d.E、C相通电图1三相六拍步进电机通电时转子位置设A相首先通电,转于齿与定于A、A'对齐(图b)。然后在A相继续通电的情况下接通B相,这时定子B、B'极对转子齿2、4产生磁拉力,使转于顺时针方向转动,但是A、Az极继续拉住齿1、3,因此,转于转到两个磁拉力平衡为止,这时转子的位置如图lb所示,即转于从图"位置顺时针转过了15°o接着A相断电,B相继续通电,这时转于齿2、4和定于B、£极对齐(图lc),转于从图lc的位置又转过了15°,其位置如图Id所示。这样,如果按A—AE—B—ECfC~CA—*A…的顺序轮流通电,则转子便顺时针方向一步一步地转动,步距角15°o电流换接六次,磁场旋转一周,转子前进了一个齿距角。如果按A—AC—C—CBfE—BA—A…的顺序通电,则电机转于逆时针方向转动。采用六拍方式时,转于走六步前进一个齿距角,即每走一步前进六分之一齿距角,因此步距角A的计算公式为:A=360°/ZrXmZr是转于齿数,tn是运行拍数。一般步进电机最常见的步距角是3°或1.5°o由上式可知,转于上不只4个齿(齿距角90°),而是20个齿(齿距角为18°)或40个齿(齿距角为9°)。为了使转于齿与定于齿对齐,两者的齿宽和齿距必须相等。因此,定子上除了6个极以外,在每个极面上还有很多小齿。由上面介绍可知,步进电机具有结构简单、维护方便、精确度高、起动灵敏、停车准确等性能。此外,步进电动机的转速决定于电脉冲频率,并与频率同步。1.2三相六拍步进电机的选择步进电机的种类很多,本设计中选择36BF02型反应式步进电机作为控制对象,其结构图如下所示。反应式步进电机有如下特点:精度为步进角的3-5%,且不累积。外表允许的最高温度在摄氏80-90度。力矩随转速的升高而下降。低速时可以正常运转,但若高于一定速度就无法启动,并伴有啸叫声。转子铁芯转子铁芯图2单定于径向分相反应式伺服步进电机结构原理图13用PLC控制三相六拍步进电机的设计要求三相步进电动机有三个绕组:A、B、C,正转通电顺序为:A—ABfBfBC->C—CAfA反转通电顺序为:A—CAfC~BCfBfAB—要求能实现正、反转控制,且正、反转切换无须经过停车步骤。具有两种转速:高速:转过一个步距角需0.05秒低速:转过一个步距角需0.5秒第二章三相六拍步进电机的驱动控制步迸电动机需配置一个专用的电源供电,电源的作用是让电机的控制绕组按照特定的顺序通电,即受输入的电脉冲控制而动作,这个专用电源称为驱动电源。步进电机及其驱动电源是一个互相联系的整体,步进电机的运行性能是由电动机和驱动电源两者配合所形成的综合效果。2.1驱动电源的组成在步进电机控制系统中,步进电机作为一种控制用的特种电机,利用其没有积累误差的特点,广泛应用于各种控制中。对于步进电动机来讲,它受控于脉冲量,比直流电机或交流电机组成的开环精度高,适用于精度要求不太高的机电一体化伺服传动系统。步进电机的驱动电源开环控制基本上由脉冲发生器、脉冲分配器和脉冲放大器(也称功率放大器)三部分组成,如图3所示。输出输出图3步迸电机的驱动电源开环控制2.2驱动电源各部分简介(1)脉冲发生器脉冲发生器是一个脉冲频率由几赫兹到几千赫兹可连续变化的脉冲信号发生器。脉冲信号一般由单片机或CPU产生,一般脉冲信号为方波信号。(2)脉冲分配器脉冲分配器中由门电路和双稳态触发器组成的逻辑电路,它根据指令把脉冲信号按一定的逻辑关系加在脉冲放大器上,使步进电动机按确定的运行方式工作。下面介绍CH250环形脉冲分配器。CH250环形脉冲分配器是三相步进电机的理想脉冲分配器,其三相六拍的工作方式的解法如图4所示。图4CH250三相六拍接法J6r、J6L是三相六拍的控制端,三相六拍供电时,若J6r=T,J6L=“0”,电机正转;若J6r=“0”,J6L=“1”,电机反转。R1为复位端,使用时,首先将其对应复位端接入高电平,使其进入工作状态,然后换接到工作位置。CL端是时钟脉冲输入端,EN是时钟脉冲允许端,用以控制时钟脉冲的允许与否。当脉冲CP由CL端输入,只有EN端为高电平时,时钟脉冲的上升沿才起作用。CH250也允许以EN端作脉冲CP的输入端,此时,只有CL为低电平时,时钟脉冲的下降沿才起作用。AO、BO、C0为环形分配器的三个输出端,经过脉冲放大器后分别接到步进电动机的三相线上。(3)脉冲放大器(功率放大器)由于脉冲分配器输出端AO、BO、C0的输出电流很小,如CH250脉冲分配器的输出电流大约为200-400^1A,而步进电动机的驱动电流较大,为了满足驱动要求,脉冲分配器输岀的脉冲需经脉冲放大器(即功率放大器)后才能驱动步进电机。第三章硬件设计3.1确定I/O点数及PLC机的选择PLC的输入信号有5个,包括停止开关、高低速控制按钮,正反转控制按钮。PLC的输出信号有三个,即三个输岀继电器。根据1/0端于的数量和种类,选择FX2N-16MRPLC机一台。3.2控制系统的I/O口及地址分配名称代码地址编号输入停止SB0X000正转SB1X001反转SB2X002低速SB3X003高速SB4X004输出A相KM1Y000B相KM2Y001C相KM3Y0023.3I/O端子接线图图5I/O端子接线图第四章软件设计三相步进电机分低速和高速二档,分别通过开关SB3、SB4选择;正、反转控制由开关SB1,SB2选择。4.1.1转速的控制由脉冲发生器产生不同周期T的控制脉冲,通过脉冲控制器的选择,可以获得不同频率的控制脉冲,从而实现对步进电机的转速控制。4.1.2正反转控制步进电机的正反转控制可通过改变步进电机各绕组的通电顺序来改变其转向,三三相六拍步进电机通电顺序为A-AB-B-BC-C-CA-A……时电机正转;当绕组按A-AC-C-CB-B-BA-A……顺序通电时电机反转。因此,可以通过编程改变输出脉冲的顺序来改变步进电机绕组的通电顺序,即通过调换接通相序,改变YO、Y1和Y2接通的顺序,以实现步进电动机的正反转控制。正转:¥0 ()、Yl 1 仁Y2Y2 2、Y0反转:[0 0、Y2J2、Y1Y0整理文档4.1.3状态转移图S1-5114.1.4步进梯形图训训伽删2伽S15删2HSIS删2W10HisrS2ISI![m[型〔刖[w.[1〔a[w,[呱[a〔a[呱[朋〔刖[呱[w,[SIS比IillJOISOI13$}I卩n\;ii581SIF9ISi呱MlSSI3)呱Ml»1WSIMDSSISI1SKISi「卩鋼13$}11$ 抵 II一IFTOC\o"1-5"\h\zUK !i幡 B] 外一IL02 肉 11一ILOIK !i霊 W,13S}KSS!lIOOJ.KSS!l筒13Sj 1LflW1 W,13S]Mil83ISI13S}册in511Ul\n13S}]r[伽13S}[伽13S}]r[伽[恤81?13$13S}1!$[恤W?013S}II?[IISB}i»UihmiS35S35"14-1-5流程图第五章心得体会为期十天的PLC课程设计即将要结束,心中也松了一口气,自己的课题终于完成To在这期间遇到了很多问题,而这些琐碎的问题是在课本学习中难以察觉的,只有在动手实践的过程中才会一个个出现,阻拦在自己面前,考验我们的能力。就我个人而言,我的课题是“三相六拍步进电机PLC控制”,网I拿到自己的课题时,
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 高端产业人才助力泸州市“专精特新”中小企业高质量发展的实践研究
- 婚姻登记工作规范
- 25年三月份度事业单位地理信息数据保密协议
- 幼儿园性教育
- 西湖吟趣图课件
- 行业协会会议
- 酒店转让协议合同范文
- 软件项目团队管理制度
- 长春保洁公司管理制度
- 运动器械车间管理制度
- 三亚崖州中心渔港休闲渔业码头工程项目 环评报告
- 能源托管项目解决方案
- 消化道肿瘤防治知识讲座
- 头疗项目规划设计方案
- 产科输血治疗专家共识(2023版)解读
- 综合实践活动《我和水果交朋友》55
- 关羽单刀赴会
- 历史 小钱币大历史教学设计
- 2020年教师教学技能大赛公共基础组-市级一等奖-(生态文明教育)实施报告
- 论王安忆小说《米尼》的女性悲剧
- 认识交通标志-课件
评论
0/150
提交评论