



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
列车牵引系统目前一页\总数三十五页\编于二十一点5/19/20231目录列车牵引理论简述列车牵引系统设备组成列车牵引控制一号线车辆牵引系统简介目前二页\总数三十五页\编于二十一点5/19/20232第一部分列车牵引理论简述目前三页\总数三十五页\编于二十一点5/19/20233列车受力分析地铁车辆在运动过程中会受到各种外力的作用,影响它的运行结果。我们把所有作用在车辆上外力的合力用G表示,根据动力学原理:当G0时,车辆加速运行;当G=0时,车辆静止或匀速运行;当G0时,车辆减速运行。作用在车辆上的诸多外力按其性质可分为三类:牵引力FK——使列车运动并可以控制的外力;车辆阻力W——在运行中产生的与列车运行方向相反的不可控制的力;制动力B——与列车运行方向相反的并使列车减速或停止的可控制的外力。这三个力作用于列车,并影响列车运行。在一般情况下不是同时存在的。在牵引工况,牵引力、阻力同时存在;在惰行工况,仅阻力存在;在制动工况,制动力、阻力同时存在。
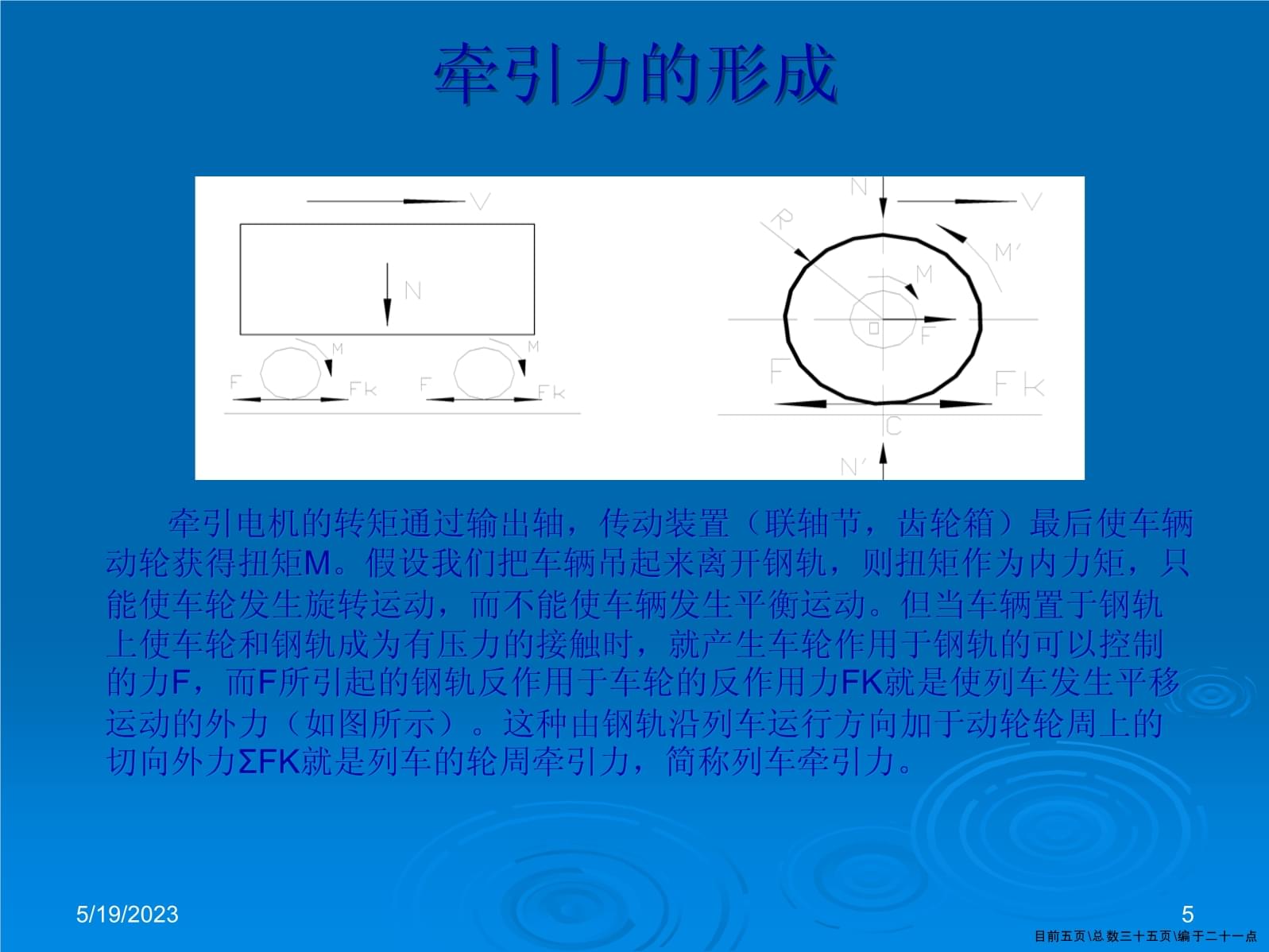
目前四页\总数三十五页\编于二十一点5/19/20234牵引力的形成牵引电机的转矩通过输出轴,传动装置(联轴节,齿轮箱)最后使车辆动轮获得扭矩M。假设我们把车辆吊起来离开钢轨,则扭矩作为内力矩,只能使车轮发生旋转运动,而不能使车辆发生平衡运动。但当车辆置于钢轨上使车轮和钢轨成为有压力的接触时,就产生车轮作用于钢轨的可以控制的力F,而F所引起的钢轨反作用于车轮的反作用力FK就是使列车发生平移运动的外力(如图所示)。这种由钢轨沿列车运行方向加于动轮轮周上的切向外力ΣFK就是列车的轮周牵引力,简称列车牵引力。目前五页\总数三十五页\编于二十一点5/19/20235黏着与黏着定律由上面的图可以看出,车轮由于受到正压力而保持动轮与钢轨的接触处的相对静止,这种现象称为“黏着”。黏着状态下的静摩擦力FK也叫“黏着力”。黏着类似于静力学里的静摩擦。当动轮的驱动转矩产生的切向力F增大时,黏着力FK也随之增大,保持与F相等,实验证明,黏着力最大值于动轮的正压力成正比,其比例常数被称为黏着系数。当F增大超过粘着力的极限值时,轮轨间的粘着被破坏,动轮因无足够的水平支承力,就不能在钢轨上滚动,而开始在钢轨上滑动,造成动轮空转,这时,钢轨对车轮的反作用力FK(牵引力)也因由静摩擦力变为动摩擦力而急剧下降。随着轮轨间相对滑动速度的增加,动磨擦系数越来越小,粘着力的下降更为严重。结果动轮以轴为中心加速空转,车轮空转易造成传动装置和走行部的损坏,并使轨与轮接触面擦伤。所以在运行中必须尽量避免。综上所述,列车牵引力最大值在任何时候都不得超过车辆各动轮与钢轨间粘着力的最大值的总和。这一原理称为粘着定律
目前六页\总数三十五页\编于二十一点5/19/20236影响牵引力的两个因素一是牵引装置传给轮对的转矩。它和牵引电机的速度特性和扭转特性所决定的牵引特性有关;二是动轮与钢轨的相互作用,主要是轮轨间的粘着系数以及动轮的荷重有关。当牵引电机选定后,轮轨间的粘着就变成产生牵引力的决定条件,牵引力不能大于轮轨粘着力,否则动轮就会产生空转,列车不能前进并造成轮对踏面和钢轨面擦伤的恶果。目前七页\总数三十五页\编于二十一点5/19/20237阻力阻力是车辆运行中必然存在的一种外力与列车运动方向相反,根据阻力引起的原因可把阻力分为基本阻力和附加阻力。基本阻力:列车在运行中总是存在,列车在平直道上运行时一般只有基本阻力。附加阻力:发生在特定的情况下,上坡、曲线、起动。列车阻力随所处环境的不同而变化,也与车辆结构设计,保养质量有关。影响阻力的因素极为复杂,变化也很大,很难进行理论推算。目前八页\总数三十五页\编于二十一点5/19/20238基本阻力产生基本阻力的主要因素有:滚动轴承及车辆各摩擦处之间的摩擦;车轮与钢轨间的滚动的滚动摩擦和滑动摩擦;冲击和振动引起的阻力;空气阻力。基本阻力诸因素对列车阻力的影响程度与运行速度有关。低速时,轴承、轮轨等摩擦的影响大,空气阻力影响小;高速时,空气阻力占主导地位,而摩擦影响就不大。对于地铁车辆而言,车辆主要在隧道中运行,由于车辆与隧道的横截面之比很小,在车辆与隧道的间隙中存在着强烈气流摩擦和车辆前后的空气压力差,使空气阻力成为车辆的主要运行阻力。列车运行速度越高,基本阻力越大。地铁在A车前端下部设计扰流板的目的就是为了减少运行时的空气阻力。高速列车把外形设计成流线形也是为了减少高速时很大的气流阻力。因为影响阻力的因素极为复杂,变化很大,所以一般采用理论和实验相结合,求出经验公式,在车辆单位重量下车辆的基本阻力公式为:W=a+bv+cv2(N/KN)阻力与速度是二次函数的关系,式中a、b、c为实验数据目前九页\总数三十五页\编于二十一点5/19/20239附加阻力坡道阻力:列车进入坡道后,由列车重力产生的沿坡道斜面的分力称为坡道阻力。曲线阻力:曲线阻力是列车通过曲线时增加的阻力,引起曲线阻力的原因有:缘与外轨头内侧的摩擦;柱轴承的轴端摩擦;轮对于钢轨的横向及纵向滑动;心销及中心销座因转向架的回转而发生的摩擦。曲线阻力与许多因素有关,如:曲线半径、运行速度、外轨超高、车重、轴距、踏面的磨耗程度等。经验公式:起动阻力:起动阻力对地铁车辆而言起动性能好,影响不大。对内燃机车是一主要阻力。目前十页\总数三十五页\编于二十一点5/19/202310制动力制动力的形成:制动是车辆运行的重要性能,制动性能的好坏在很大程度上限制了车辆的载重和列车的运行速度。地铁车辆主要采用电制动,但是由于电制动的制动力和车辆运行速度之间的关系是速度越低制动力越小,所以停车和紧急制动时还要采用空气制动系统。空气制动又称摩擦制动。列车运行时,增大制动力可缩短制动距离,提高行车的安全性,但是,并不是制动力越大,制动效果越好。制动力也和实现牵引力一样,必须遵守粘着定律。当制动力大于轮轨间的粘着力时,就像牵引力一样,也会发生轮轨间的滑行,此时,车轮被闸瓦抱死,车轮在钢轨上滑行。列车一旦滑行,首先是制动力下降,其次会发生轮对踏面及轨面的擦伤。对此司机在驾驶列车,尤其是天气不良,轮轨粘着状态不好时,要特别加以注意。为了保证正常制动,制动力必须不超过粘着力目前十一页\总数三十五页\编于二十一点5/19/202311第二部分列车牵引系统设备组成目前十二页\总数三十五页\编于二十一点5/19/202312牵引系统设备组成受电弓高速断路器HSCBVVVF牵引逆变器牵引控制单元DCU牵引电机制动电阻司控器目前十三页\总数三十五页\编于二十一点5/19/202313受电弓组成:底座下臂下导杆上臂上导杆弓头张紧弹簧气压升弓装置导电桥线机构阻尼器托最低点位置指示器高位阻挡用途:从接触网获得1500V直流电,将其转化为三相交流电,来满足列车牵引和车上其他的设备的用电需求。
目前十四页\总数三十五页\编于二十一点5/19/202314高速断路器HSCB低压控制高压的开关设备。其作用就是将电网与车辆高压设备分开,利用HSCB过电流(如短路)后的快速响应特性来保护直流侧设备。目前十五页\总数三十五页\编于二十一点5/19/202315VVVF逆变器组成:电源电流传感器滤波电抗器直流电压传感器过电压释放晶闸管过电压放电电阻放电电阻,滤波电容器IGBT模块相电流传感器作用:牵引时,通过控制内部的IGBT模块的通断来产生三相交流电源供牵引电机使用;制动时,将感应电机产生的交流电整流成直流电反馈给电网或制动电阻。
目前十六页\总数三十五页\编于二十一点5/19/202316牵引控制单元DCUDCU的主要功能异步电动机控制
牵引控制单元DCU将机车控制级给定值和控制指令转换成VVVF逆变器用的控制信号,对VVVF逆变器和牵引电机进行控制,包括调节、保护、逆变器脉冲模式的产生等。对VVVF逆变器和牵引电机进行保护控制电制动(ED-BRAKE)进行调整、保护和逆变器脉冲模式的产生,实现在再生制动和电阻制动之间的平滑过渡。防空转/防滑保护控制列车加减速冲击限制保护通信网路功能故障诊断功能等目前十七页\总数三十五页\编于二十一点5/19/202317牵引电机基本参数类型和冷却: 自通风铜条鼠笼式三相感应电机额定方式: 持续制额定功率: 190kW转矩:766N·m电机电压: 1100V电机电流: 130A额定频率: 80Hz额定转速: 2370r/min转差率: 1.4%-转差率极数: 4极效率: 93%功率因数: 84%最大功率:牵引时:277kW,DC1350V车速40km/h,电流210A制动时:455kW,DC1650V车速80km/h,电流215A绝缘等级: 200级(IEC60349-2)齿轮传动比: 7.71(131/17)轮径: 840mm(新)805(半磨耗,计算用)770(全磨耗)最高转速: 4780r/min最高试验转速: 5740r/min转向: U-V-W正常相序时按照顺时针方向旋转(从牵引端看)估计重量: 625Kg目前十八页\总数三十五页\编于二十一点5/19/202318制动电阻为牵引系统在电制动时消耗过高再生电压的耗能设备,保证线网及列车的安全。因为在电制动的情况下,当能量不能被电网完全吸收时,多余的能量必须转换为热能消耗在制动电阻上,否则电网电压将抬高到不能承受的水平。因此制动电阻的存在确保了电网上的其它设备的安全。额定电阻值(20℃) 2.95Ω±5%采用自然风冷的冷却方式目前十九页\总数三十五页\编于二十一点5/19/202319司控器司机控制器是用来操纵地铁车辆运行的主令控制器,是利用控制电路的低压电器间接控制主电路的电气设备。司机控制器的面板上有控制手柄、换向手柄两种可操作机构。控制手柄有:牵引区、0位、制动区、快速制动位;换向手柄有:“向后”、“0”、“向前”三个档位。司机控制器的控制手柄0位、牵引最大位、制动最大位、快速制动位有定位;在这些档位之间为无级调节;通过转动同轴的驱动电位器用来调节输入到电子柜的电压指令,从而达到调节机车牵引力和电阻制动的目的;换向手柄在每个档位均定位,换向手柄稳定在相应的档位中。控制手柄、换向手柄和机械锁之间相互机械联锁。在使用时,先打开机械锁,再由换向手柄选定机车的行车方向和工况,再操作控制手柄来控制机车的速度。在行车过程中,如需要改变机车的工况时,必须将控制手柄放回“0”位后,才可进行换向手柄的操作。如司机需要进行异端操作时,必须将本端司控器的控制手柄置“0”位,且换向手柄置“0”位,锁闭机械锁,拔出钥匙,方可进行异端操作。目前二十页\总数三十五页\编于二十一点5/19/202320第三部分列车牵引控制目前二十一页\总数三十五页\编于二十一点5/19/202321整列车的牵引指令控制车辆牵引指令中有对车辆各种状态的监控,一旦这些因素有一点不满足要求,牵引指令线就会断开,列车将无法牵引,以此来进行保护。这其中除了信号系统相关的保护外,还有车门状态监控、主风缸压力大小监控、停车制动状态监控、紧急制动状态监控,如下图所示:DCR为车门全关闭继电器,当车门全部关好后,DCR得电,其串在牵引回路中的常开触点闭合,一旦车门中有一个未能关闭,继电器失电,触点断开,牵引指令就法发送出去。MRPR2为主风缸压力继电器,是由列车管理系统TMS控制,当主风缸的压力高于6bar时得电,其辅助触点闭合,一旦主风缸压力低于6bar,继电器失电,触点断开,牵引封锁。PKBR为停放制动继电器,列车在牵引前必须按停放制动缓解按钮缓解停放制动才能让继电器得电来牵引,若停放制动不缓解,继电器不得电,将牵引封锁。EBR为紧急制动继电器,若列车处于紧急制动状态,继电器失电,列车将无法牵引。DCRDLCOSPKBRPKBRCOSMRPR2MPR2COS110vEBRVVVFDCU目前二十二页\总数三十五页\编于二十一点5/19/202322牵引主电路原理高速断路器(HB),线路接触器(LB),充电电阻(CHRe),充电接触器(LCH),制动斩波模块(BCH1,2),制动电阻(BRe1,2)输入电流传感器(DCCTS),差动电流传感器(DCCT1),滤波电抗器(FL),直流电压传感器(DCPT1、2),放电电阻(DCHR)滤波电容器(FC),牵引电机(IM1~4),U相电流传感器(CTU),V相电流传感器(CTV),IGBT模块(IGU~IGZ)目前二十三页\总数三十五页\编于二十一点5/19/202323主电路功能与说明功能主电路通过HB、线路接触器连至接触网,从电网获得电能。逆变器将1500V直流电压转换为三相交流电压,从而驱动三相感应电机。逆变器由IPM模块组成。该逆变器能够实现变压变频控制,它能够控制感应电机的转速,也就使得列车速度能在一个很宽的范围内调节。它还能够实现牵引/再生制动和向前/向后操作,不需切换主电路,而是通过对滑差频率及输出相序的控制来实现的,也就是说只需控制门极信号。电容滤波器用以吸收地铁接触网电压中的纹波。制动电阻用于消耗再生制动网压过高时,不能反馈到网上的能量。说明整个主电路具有驱动4台感应电机的能力。采用大容量的IPM模块,逆变器的每个桥臂由一个1S1P连接到功率单元组成。为了减少IPM和滤波电容器之间的杂散电感,把滤波电容器的安装尽量靠近IPM,并采用了叠片式低感母排。采用了大容量的电容滤波器(FC)以吸收接触网电压中的纹波。当检测到主电路中有过电压时,BCH动作,使滤波电容通过电阻放电,从而实现过压保护。检测电压的DCPT2连在电容滤波器上。充电时,主电路的能量通过充电电阻传递过来。目前二十四页\总数三十五页\编于二十一点5/19/202324牵引系统基本控制原理一
整个牵引控制系统由输入值设定、速度测量、电机控制、脉冲发生器、能量反馈各环节构成。DCU通过列车线接受来自控制系统的牵引/制动力绝对值(以百分比的形式),与此同时还接受司机发出牵引或制动指令,来决定是施加牵引或制动力。在给定值进行实际电机控制前,必须经过以下条件的处理:一、输入值设定载荷校验DCU根据相应动车的载荷状况来调整实际牵引/制动力,这是由于采用了动力分散型控制,为了保持车钩之间的相对运动最小,并且使整车达到相同的动态特性。冲击限制不同的给定值大小的改变速率必须符合冲击限制的规定,但在防滑/防空转功能激活的时候则不受此限制。速度限制(牵引时)一号线规定了3个速度限制,速度控制的优先级高于电机控制。正常速度: 80km/h倒车速度: 10km/h慢行速度: 3km/h目前二十五页\总数三十五页\编于二十一点5/19/202325牵引系统基本控制原理二线电流限制(牵引时)在牵引工况时,线电流控制的优先级高于电机控制,出于功耗的考虑,会设置一个限制值。欠压保护(制动时)在制动时,网压一直受到检测,当网压降到1500V以下时,制动力矩随速度和网压相应的减少,这时不足的制动力由气制动补充。空转/滑行保护空转/滑行保护通过比较拖车动车之间的速度差异来实现,通过适当减少力矩设定值,该保护能确保输出最大所要求的牵引/制动力,当拖车速度检测失败时,该保护还可以通过仿真计算拖车速度来保证正常功能目前二十六页\总数三十五页\编于二十一点5/19/202326牵引系统基本控制原理三二、速度检测每个牵引电机带一个速度传感器,每个牵引控制单元连接3个速度传感器。在正常情况下,该数值直接送入DCU进行牵引控制,在进行速度测量的时候,如果出现各速度值不相等的情况(例如,空转/滑行时),甚至在极端情况下,只有一个电机的速度信息对于牵引控制来说都是足够的。当DCU监控逻辑系统发现有一个速度传感器故障时,马上封锁该速度信号,以免对牵引控制造成严重的影响。除了电机速度,在DCU中同样检测拖车的速度。在拖车一个轴上装有一个编码速度传感器。三、脉冲模式发生器脉冲模式发生器根据电机控制的三个输入变量:相控因数、定子频率、和校正角实时计算牵引逆变器中的IGBT触发脉冲。目前二十七页\总数三十五页\编于二十一点5/19/202327牵引系统基本控制原理四四、能量反馈在电机的能量反馈中,能量反馈到电网中,如果在电制动的情况下,能量不能被电网完全吸收,多余的能量必须转换为热能消耗在制动电阻上,否则电网电压将抬高到不能承受的水平。制动斩波器的存在确保大部分的能量能反馈回电网,同时又保护了电网上的其他设备。在制动时,电网电压一直被检测,如果网压降到1500V以下,制动力矩随速度和网压相应受限制,不足的电制动由气制动补充,如果网压降到回馈制动的保护值1000V时,电制动切除,列车制动完全由气制动承担。目前二十八页\总数三十五页\编于二十一点5/19/202328电机控制原理VVVF逆变器由六个IGBT开关SU–SZ组成,同一时间总是开通三个开关输出三相交流电。交流电的频率、电压是通过开关的导通时间来控制的。采用空间矢量控制电机的磁通大小和方向(空间矢量)通过逆变器输出线电压和相电流,电机速度等参数近似得到。绕组中的电流和电机电压作为空间矢量与磁通量有关,目前二十九页\总数三十五页\编于二十一点5/19/202329列车运行控制模式图目前三十页\总数三十五页\编于二十一点5/19/202330第四部分一号线列车牵引系统简介目前三十一页\总数三十五页\编于二十一点5/19/202331一号线车辆牵引系统概况沈阳地铁一号线牵引系统由日本三菱公司提供:采用3动3拖方案采用受电弓受流方式采用1C4M供电方式,即每辆动车配置一台VVVF逆变器向同一辆动车上的四台牵引电动机供电的交流传动方式,。设一台高速断路器。牵引电机采用矢量控制,在AW0~AW3范围内能自动调整牵引力和电制动力的大小。列车运行控制分为手动控制和自动控制。基本功能(1)牵引工况向异步牵引电动机提供频率和电压连续可调的三相电源;(2)再生制动工况当异步电动机变成异步发电机时,将异步发电机的电能反馈给电网;(3)电阻制动工况当异步电动机变成异步发电机,并且接触网不能一部分或全部吸收再生能量时,制动斩波器导通,制动电阻投入,消耗电网不能吸收的制动能量。目前三十二页\总数三十五页\编于二十一点5/19/202332牵引逆变器参数
逆变器模块:最大输出容量1110kVA(牵引,1350Vdc,40km/h)额定输出容量760kVA额定输入电压DC1500V(100
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 宝宝成长纪念册
- 吉兰巴雷综合症护理课件
- 脊柱侧弯护理
- 行政总监工作总结
- 年终总结汇报扁平化模板
- 护理检查反馈整改措施
- 中医护理整体病历书写
- 北京市大兴区名校2025年初三适应性月考(九)英语试题含答案
- 河北科技师范学院《主题摄影创意与实践(文史类)》2023-2024学年第二学期期末试卷
- 贵阳职业技术学院《领导力开发》2023-2024学年第二学期期末试卷
- 大象版小学科学四年级下册全册教案(教学设计)及反思
- 2025年重庆出版集团招聘笔试参考题库含答案解析
- 职业技术学院《直播电商运营主持》课程标准
- iso28000-2022供应链安全管理手册程序文件表单一整套
- 医院肾脏病健康宣教
- 【MOOC】电动力学-同济大学 中国大学慕课MOOC答案
- 介入手术宣教
- 论持久战全文(完整)
- 2023-2024学年广东省深圳市罗湖区八年级(下)期中英语试卷
- 2024年教师资格考试高级中学面试生物试题与参考答案
- GB/T 27728.2-2024湿巾及类似用途产品第2部分:婴童湿巾专用要求
评论
0/150
提交评论