


版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、6-11) 以M为原点,在翻斗上建立动坐标系,设在动坐标系上两个圆点分别为和。两个圆点在动坐标系中坐标分别为:=(5,-5);=(30,-5)根据翻斗的三个方位,可以得到动坐标系与固定坐标系之间的关系如下:;其中,表示翻斗第i个位置(i=1,2,3)动坐标系与固定坐标系之间的变换矩阵;角标F表示固定坐标系,M表示动坐标系角标j表示动坐标系中第j个点,j=1,2位置1的变换矩阵为:位置2的变换矩阵为:位置3的变换矩阵为:对于此三位置精确综合问题,有下列方程组成立:其中,、任意选取编写matlab程序:clearclcth1=-5*pi/180;th2=-30*pi/180;th3=-80*pi/
2、180;M1=cos(th1) -sin(th1) 10;sin(th1) cos(th1) 45;0,0,1;M2=cos(th2) -sin(th2) 30;sin(th2) cos(th2) 50;0 0 1;M3=cos(th3) -sin(th3) 56;sin(th3) cos(th3) 46;0 0 1;x1m=5;y1m=-5;x2m=30;y2m=-5;m1=x1m;y1m;1;m2=x2m;y2m;1; f11=M1*m1;f12=M2*m1;f13=M3*m1; f21=M1*m2;f22=M2*m2;f23=M3*m2; A=solve(f11(1)-xa)2+(f11
3、(2)-ya)2-ra2. ,(f12(1)-xa)2+(f12(2)-ya)2-ra2. ,(f13(1)-xa)2+(f13(2)-ya)2-ra2. ,xa,ya,ra); B=solve(f21(1)-xb)2+(f21(2)-yb)2-rb2,. (f22(1)-xb)2+(f22(2)-yb)2-rb2,. (f23(1)-xb)2+(f23(2)-yb)2-rb2,. xb,yb,rb); Xa=eval(A.xa)Ya=eval(A.ya)Ra=eval(A.ra)Xb=eval(B.xb)Yb=eval(B.yb)Rb=eval(B.rb)计算结果:Xa = 34.0979Y
4、a =-11.2030Ra =54.4201Xb =39.8915Yb =20.3409Rb =17.0691图解法验证:2)通过作图法来实现 eq oac(,1)坐标系的转换原坐标系如左图所示,此时是站在固定坐标系上看动坐标系;若站在动坐标系上看固定坐标系的移动,则得到动坐标系通过平面的三个位置如右图所示:可以通过matlab求解原变换矩阵的逆阵来验证坐标变换。clearclcth1=-5*pi/180;th2=-30*pi/180;th3=-80*pi/180;M1=cos(th1) -sin(th1) 10;sin(th1) cos(th1) 45;0,0,1;M2=cos(th2) -
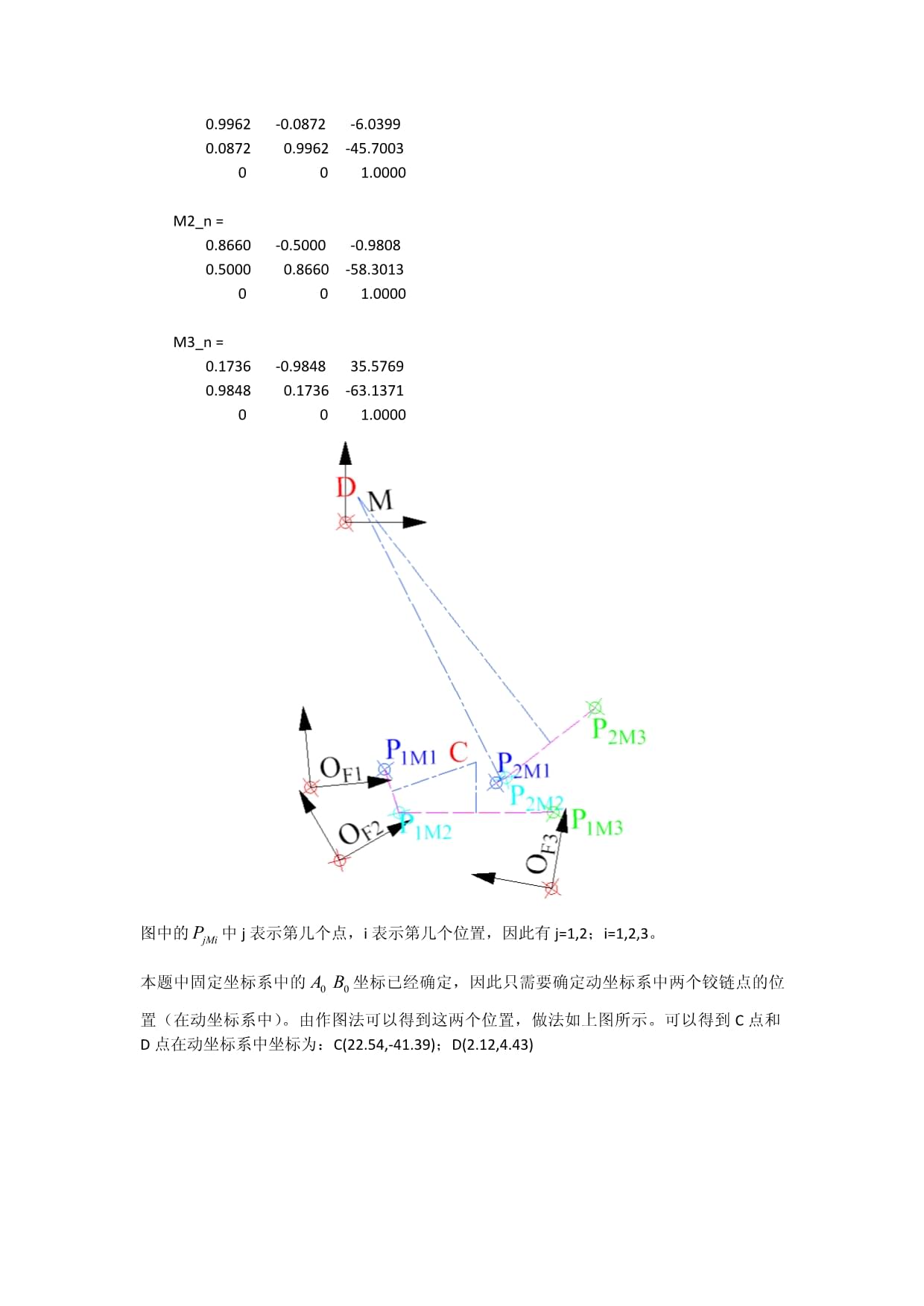
5、sin(th2) 30;sin(th2) cos(th2) 50;0 0 1;M3=cos(th3) -sin(th3) 56;sin(th3) cos(th3) 46;0 0 1; M1_n=inv(M1)M2_n=inv(M2)M3_n=inv(M3)计算结果如下:M1_n = 0.9962 -0.0872 -6.0399 0.0872 0.9962 -45.7003 0 0 1.0000M2_n = 0.8660 -0.5000 -0.9808 0.5000 0.8660 -58.3013 0 0 1.0000M3_n = 0.1736 -0.9848 35.5769 0.9848 0.
6、1736 -63.1371 0 0 1.0000图中的中j表示第几个点,i表示第几个位置,因此有j=1,2;i=1,2,3。本题中固定坐标系中的坐标已经确定,因此只需要确定动坐标系中两个铰链点的位置(在动坐标系中)。由作图法可以得到这两个位置,做法如上图所示。可以得到C点和D点在动坐标系中坐标为:C(22.54,-41.39);D(2.12,4.43)6-2题中给了四组数据,为四个位置的函数综合问题。五个未知量,只有一个可以任意给定。给定初始距离x=1000mm将函数综合问题转化为位置综合问题:设、分别为动坐标系四个位置的原点可以通过坐标变换得到这四个位置:四个点在动坐标系中的坐标分别为(10
7、00,y)、(950,y)、(865,y)、(745,y).四个位置的分别为0、-20、-40、-60clearclcth1=0;th2=-20*pi/180;th3=-40*pi/180;th4=-60*pi/180; M1=cos(th1) -sin(th1);sin(th1) cos(th1);M2=cos(th2) -sin(th2);sin(th2) cos(th2);M3=cos(th3) -sin(th3);sin(th3) cos(th3);M4=cos(th4) -sin(th4);sin(th4) cos(th4); syms y;m1=1000;y;m2=950;y;m3
8、=865;y;m4=745;y; f1=M1*m1f2=M2*m2f3=M3*m3f4=M4*m4得到结果:设未确定的铰链点坐标为C(xc,yc)对于此四位置精确综合问题,有下列方程组成立:解此方程组则可以得到铰链C在固定坐标系下的位置,即可以确定摇杆滑块机构的尺寸。6-3根据题意,首先确定铰链点A和D在车厢壁上的位置和标线AE的方向。其中AD=150mm。沿着标线AE的方向延伸至水平线,可以得到活动铰链点C,这个位置的C记为。为了使这个机构能稳定在张开的位置,需要利用连杆机构的死点,则活动铰链点B一定在铰链点A和的连线上。这时,如果以连架杆AB作为固定机架(假设),则这个问题可以转化为一个两
9、位置精确综合问题。可以用作图法来实现,作图方法如下图所示。图中所得到的即为得到的满足设计要求的四杆机构。6-5题目中一共三个构件,注意图中机架为杆3。杆2和杆3的速度瞬心为铰链C,凸轮1和杆3的速度瞬心为铰链A;由于杆2和凸轮1之间既存在相对滚动又存在相对滑动,因此它们之间的速度瞬心不容易确定,但是可以知道的是两者的速度瞬心在它们的公法线BO上。又根据三心定理可知,三个构件之间两两构件的三个速度瞬心应该在同一条直线上。因此我们可以将杆2和凸轮1的公法线延长并于直线CA相交于点通过解三角形可以得到=2根据瞬心的性质,有下式成立:所以已知可知6-6我们已知原动件4的转速,目的是求解构件6的位置、速度和加速度的值。我们可以试着用瞬心法来解决这个问题。图中构件3、4的瞬心为点,构件2、3之间既有相对滚动又有相对滑动,因此它们的瞬心点不能确定,但是可以知道在它们的公法线上,如图所示在虚线上。因此构件2、4的瞬心也在上。又知道构件1、4的瞬心为点,构件1、2的瞬心点为。再根据三心定理,可知也在虚线上。两条虚线的交点即为瞬心点。找到了构件2、4的瞬心
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 初中九年级物理:第十六章电压电阻知识点及练习
- 脉搏仪的课程设计
- 共同合作开创餐饮经营合同(标准版)
- 模电高频课程设计
- 办公楼施工合同(范本)
- 宠物饲料营养均衡与调整考核试卷
- unit1(拔尖作业)2024-2025学年五年级上册 英语 译林版
- 电影道具设计中的生态环境意识考核试卷
- 火工品企业运营与管理考核试卷
- 矿山机械创新驱动发展与技术改造考核试卷
- 城市赛马场规划设计建议报告
- 广场管网施工方案
- 校园滑冰商业计划书
- 档案整理及数字化服务方案
- ISO14001环境管理体系内审记录表 评审表
- 中国特色社会主义思想概论 课件 第四章 坚持以人民为中心
- 碳酸钠与碳酸氢钠教案教学设计
- 管道安全检查表
- 绿色卡通风学校心理健康委员培训PPT
- 一节失控的卫生课教材
- 中国当代文学七十年知到章节答案智慧树2023年湘潭大学
评论
0/150
提交评论