



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
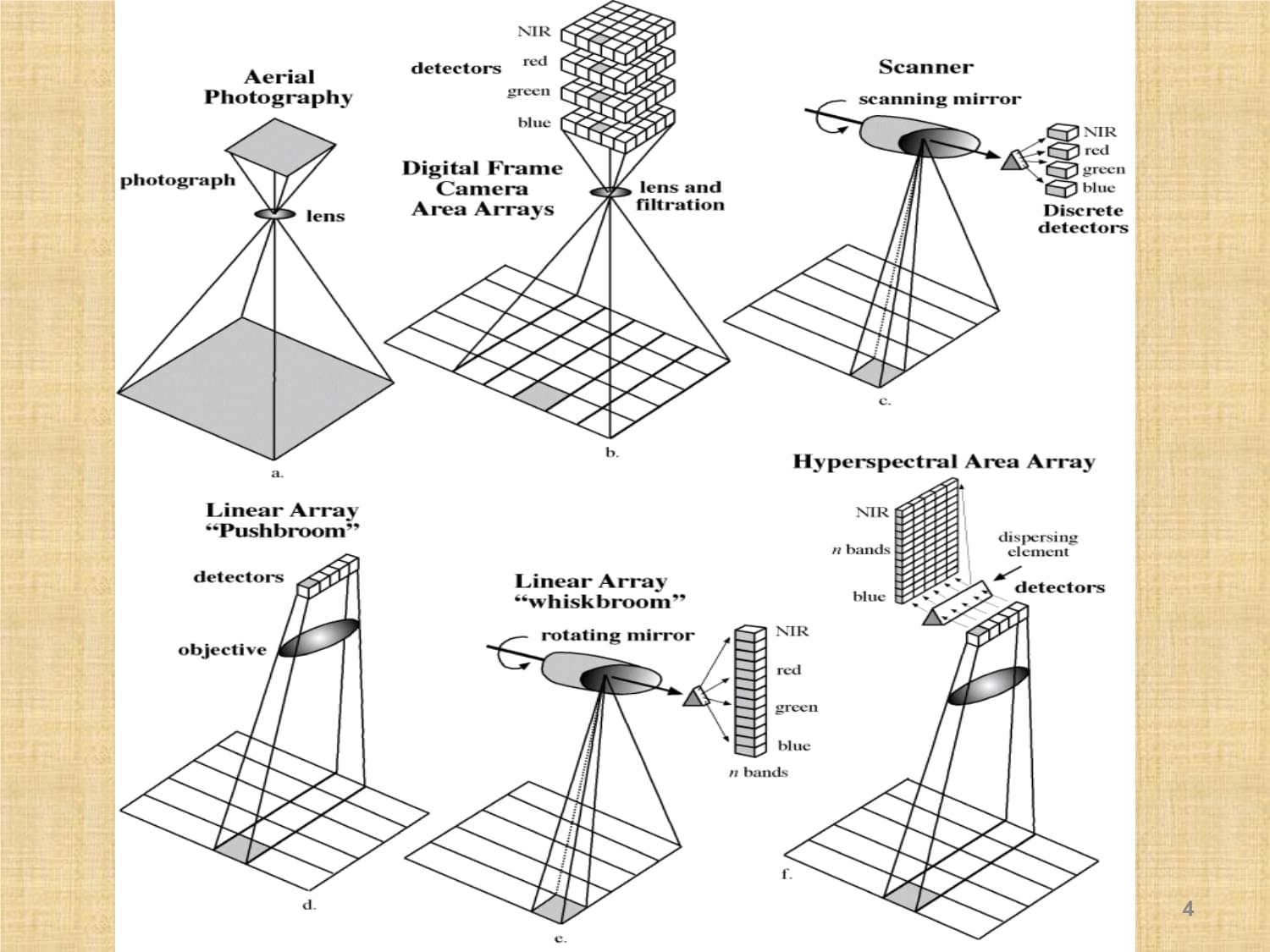
1、第三章 遥感传感器及其成像原理1内容提纲扫描成像类传感器雷达成像仪2传感器分类摄影类型的传感器扫描成像类型的传感器雷达成像类型的传感器非图像类型的传感器 343.1扫描成像类传感器对物面扫描的成像仪对地面直接扫描成像(红外扫描仪、多光谱扫描仪) 对像面扫描的成像仪瞬间在像面上先形成一条线图像或一幅二维影像,然后对影像进行扫描成像(线阵列CCD推扫式成像仪 )成像光谱仪以多路、连续并具有高光谱分辨率方式获取图像信息的仪器 53.1.1 对物面扫描的成像仪红外扫描仪MSS多光谱扫描仪 TM专题制图仪 ETM+增强型专题制图仪6红外扫描仪7当旋转棱镜旋转时,第一个镜面对地面横越航线方向扫视一次,在扫
2、描视场内的地面辐射能,由刈幅的一边到另一边依次进人传感器经探测器输出视频信号经电子放大器放大和调制在阴极射线管上显示出一条相应于地面扫描视场内的景物的图像线,这条图像线经曝光后在底片上记录下来接着第二个扫描镜面扫视地面,由于飞机向前运动,胶片也作同步旋转,记录的第二条图像正好与第一条衔接。依次下去,就得到一条与地面范围相应的二维条带图像。instantaneous field of view;IFOV定义:在扫描成像过程中一个光敏探测元件通过望远镜系统投射到地面上的直径或对应的视场角度扫描成像过程当旋转棱镜旋转时,第一个镜面对地面横越航线方向扫视一次,在扫描视场内的地面辐射能,由刈幅的一边到另
3、一边依次进人传感器,经探测器输出视频信号,经电子放大器放大和调制,在阴极射线管上显示出一条相应于地面扫描视场内的景物的图像线,这条图像线经曝光后在底片上记录下来。接着第二个扫描镜面扫视地面,由于飞机向前运动,胶片也作同步旋转,记录的第二条图像正好与第一条衔接。依次下去,就得到一条与地面范围相应的二维条带图像。8红外扫描仪的分辨率9红外扫描仪的瞬时视场d:探测器尺寸(直径或宽度);f:扫描仪的焦距红外扫描仪垂直指向地面的空间分辨率H: 航高 在仪器设计时已经确定,所以对于一个使用着的传感器,其地面分辨率的变化只与航高有关。航高大,a0值自然就大,则地面分辨率差。10:扫描角 :航高:地面分辨率:
4、平行于航行方向地面分辨率:垂直于航行方向地面分辨率全景畸变由于地面分辨率随扫描角发生变化,使红外扫描影像产生畸变,这种畸变通常称之为全景畸变,形成原因是像距保持不变,总在焦面上,而物距随扫描角发生变化所致。11温度分辨率温度分辨率与探测器的响应率R和传感器系统内的噪声N有直接关系红外系统的噪声等效温度限制在0.1 0.5K之间,系统的温度分辨率一般为等效噪声的26倍。12扫描线的衔接13当扫描镜的某一个反射镜面扫完一次后,第二个反射镜面接着重复扫描,飞机的飞行使得两次扫描衔接。如何让每相邻两条带很好地衔接,可由以下的关系式来确定。假定旋转棱镜扫描一次的时间为t,一个探测器地面分辨率为a,若要使
5、两条扫描带的重叠度为零,但又不能有空隙,则必须W为飞机的地速:将出现扫描漏洞:将出现扫描重叠瞬时视场和扫描周期都为常数,所以只要速度w与航高H之比为一常数,就能使扫描线正确衔接,不出现条纹图像。热红外像片的色调特征 14热红外像片上的色调变化与相应的地物的辐射强度变化成函数关系。地物发射电磁波的功率和地物的发射率 成正比,与地物温度的四次方成正比,因此图像上的色调也与这两个因素成相应关系。图3-5 红外像片热红外扫描仪对温度比对发射本领的敏感性更高,因为它与温度的四次方成正比,温度的变化能产生较高的色调差别。MSS多光谱扫描仪陆地卫星上的 MSS(Multispectral Scanner)由
6、扫描反射镜、校正器、聚光系统、旋转快门、成像板、光学纤维、滤光器和探测器等组成。15扫描反射镜扫描反射镜是一个表面镀银的椭圆形的铍反射镜,长轴为33cm,短轴为23cm。当仪器垂直观察地面时,来自地面的光线与进入聚光镜的光线成90。扫描镜摆动的幅度为2.89,摆动频率为13.62Hz,周期为73.42ms,它的总观测视场角为 11.56。扫描镜的作用是获取垂直飞行方向两边共185km范围内的来自景物的辐射能量,配合飞行器的往前运行获得地表的二维图像。16反射镜组反射镜组由主反射镜和次反射镜组成,焦距为82.3cm,第一反射镜的孔径为22.9cm,第二反射镜的孔径为8.9cm,相对孔径为3.6。
7、反射镜组的作用是将扫描镜反射进入的地面景物聚集在成像面上。17成像板成像板上排列有 242个玻璃纤维单元,按波段排列成四列,每列有 6个纤维单元,每个纤维单元为扫描仪的瞬时视场的构像范围,由于瞬时视场为86rad,而卫星高度为915km,因此它观察到地面上的面积为 79m x 79m。18探测器探测器的作用是将辐射能转变成电信号输出。它的数量与成像板上的光学纤维单元的个数相同,所使用的类型与响应波长有关,MSS-4-6采用18个光电倍增管,MSS-7使用6个硅光电二极管,Landsat-2,3的MSS8采用2个汞镉碲热敏感探测器。其致冷方式采用辐射致冷器致冷。经探测器检波后输出的模拟信号进入模
8、数变换器进行数字化,再由发射机内调制器调制后向地面发送或记录在宽带磁带记录仪上。19MSS成像过程 扫描仪每个探测器的瞬时视场为86rad,卫星高为915km,因此扫猫瞬间每个像元的地面分辨率为 79m x 79m,每个波段由6个相同大小的探测单元与飞行方向平行排列,这样在瞬间看到的地面大小为474m x 79m。又由于扫描总视场为 11.560,地面宽度为185km,因此扫描一次每个波段获取6条扫描线图像,其地面范围为 474m x 185km。又因扫描周期为73.42ms,卫星速度(地速)为6.5KM/s,在扫描一次的时间里卫星往前正好移动474m,因此扫描线恰好衔接。202122自西往东
9、对地面的有效扫描时间为33ms,即在33ms内扫描地面的宽度为185km,按以上宽度计算,每9.958 s内扫描镜视轴仅在地面上移动了56m,因此采样后的MSS像元空间分辨率为56m x 79m (Landsat-4为68m x 83m)。采样后对6bit进行编码,24路输出共需144bit,都在9.958S内生成,反算成每个字节(6bit)所需的时间为0.3983S(其中包括同步信号约占0.3983S) ,每个bit为0.0664S,因此,bit每个像元(每个信道的一次采样)采用速率约为15Mbit/s(15MHz)。采样后的数据用脉码调制方式以 2229.5MHz或 2265.5MHz的频
10、率馈入天线向地面发送。MSS产品粗加工产品,它是经过了辐射校准(系统噪声改正)、几何校正(系统误差改正)、分幅注记(28.6s扫描390次分一幅)。精加工产品,它是在粗加工的基础上,用地面控制点进行了纠正(去除了系统误差和偶然误差)特殊处理产品。23TM专题制图仪24TM专题制图仪 Landsat-4/5上的TM(Thematic Mapper)是一个高级的多波段扫描型的地球资源敏感仪器,与多波段扫描仪MSS性能相比,它具有更高的空间分辨力,更好的频谱选择性,更好的几何保真度,更高的辐射准确度和分辨力。 TM中增加一个扫描改正器,使扫描行垂直于飞行轨道(MSS扫描不垂直于飞行轨道),另外使往返
11、双向都对地面扫描(MSS仅仅从西向东扫描时收集图像数据,从东向西时,关闭望远镜与地面之间的光路)。25TM专题制图仪 TM的探测器共有100个,分七个波段,采用带通滤光片分光,滤光片紧贴于探测器阵列的前面。探测器每组16个,呈错开排列。 TM14用硅探测器(即CCD探测阵列) TM5和TM7各用16个锑化铟红外探测器 TM6用4个汞镉碲热红外探测器,成两行排列 TM15及TM7每个探测器的瞬时视场在地面上为3030;TM6为120120。 摄影瞬间16个探测器(TM6为4个)观测地面的长度为480m,扫描线的长度仍为185km,一次扫描成像为地面的480m185km。26图3-12 TM探测器
12、阵列图TM成像过程27TM成像过程28TM各波段特征29ETM+增强型专题制图仪波段号类型波谱范围 /um地面分辨率 1Blue-Green 0.450-0.51530m 2Green0.525-0.605 30m 3Red0.630-0.69 30m 4Near IR 0.775-0.90 30m 5SWIR1.550-1.75 30m 6LWIR10.40-12.560m 7SWIR 2.090-2.35 30m 8Pan0.520-0.9015m30TM、MSS、ETM+的比较31MSS扫描方向不垂直于飞行方向,去扫回不扫,存在全景变形,24+2个玻璃纤维单元,5个波段:绿色、红色、两个
13、红外波段、一个热红外波段。分辨率:80m(79m、83m);热红外:120120m。TM中增加了一个扫描改正器,使扫描行垂直于飞行轨道,往返双向都对地扫描,存在全景变形, 探测器共100个(166+4),分7个波段:蓝、绿、红、三个红外波段、一个热红外波段。分辨率:3030m;热红外:120120m。ETM+:辐射定标精度提高,辐射校正有了很大改进。8个波段,增加了PAN(全色)波段,分辨率15m,远红外波段为60m。MSS、TM、ETM+的比较MSSTMETM+扫描方向不垂直于飞行方向,去扫回不扫,存在全景变形增加了一个扫描改正器,使扫描行垂直于飞行轨道,往返双向都对地扫描,存在全景变形辐射
14、定标精度提高,辐射校正有了很大改进24+2个玻璃纤维单元,5个波段:绿色、红色、两个红外波段、一个热红外波段探测器共100个(166+4),分7个波段:蓝、绿、红、三个红外波段、一个热红外波段8个波段,增加了PAN(全色)波段分辨率:80m(79m、83m);热红外:240240m分辨率:3030m;热红外:120120m分辨率15m;远红外波段:60m323.1.2 对像面扫描的成像仪 HRV线阵列推扫式扫描仪 33SPOT上的HRV 多光谱型的HRV 三个波谱段,每个波谱段的线阵列探测器组由3000个CCD元件组成。每个元件形成的像元地面分辨率为2020m。因此一行CCD探测器形成的图像线
15、,相对地面上为2060km。波段1:0.5 0.59m波段2:0.61 0.68m波段3:0.79 0.89m全色的HRV 由6000个CCD元件组成一行。地面上总的视场宽度仍为60km,因此每个像元地面的大小为10m10m。波段范围:0.510.73m34立体观测方式HRV平面反射镜可绕指向卫星前进方向的滚动轴(x)轴旋转,从而在不同的轨道间实现立体观测HRG通过侧摆可在不同轨道上形成异轨立体HRS由前视后视相机组成,形成同轨立体353.1.3 成像光谱仪以多路、连续并具有高光谱分辨率方式获取图像信息的仪器。通过将传统的空间成像技术和地物光谱技术有机地结合在一起,可以实现对同一地区同时获取几
16、十个到几百个波段的地物反射光谱图像。基本上属于多光谱扫描仪,其构造与CCD线阵列推扫式扫描仪和多光谱扫描仪相同,区别仅在于通道数多,各通道的波段宽度很窄。 3637光谱分辨率对水铝矿反射光谱的影响3839403.2雷达成像仪41发射机转换开关接收机天线显示器距离信息:图3-19 脉冲式雷达的一般结构3.2雷达成像仪特点主动式遥感雷达信号(距离、方位、相对速度、反射特性)穿透特性分类真实孔径雷达(Radar)合成孔径雷达(SAR)相干雷达(INSAR)激光雷达(LIDAR:Light detection and ranging ) 激光雷达技术复杂、研制周期长,设备昂贵,因此要发展它不仅需要有关
17、的高级专门人才,还要有雄厚的经济基础。 42雷达接收到的回波强度是系统参数和地面目标参数的复杂函数。系统参数: 雷达波的波长 发射功率 照射面积和方向 极化等地面目标参数与地物的复介电常数、地面粗糙度等4344PolarizationPolarizationTransmit Receive Together V H VH H V HV V V VV H H HH45极化信息提高目标识别效果的机理就是增加了通道数量,也就是增加了信息来源。原来的一幅SAR图像只能是单一极化通道得到的,如果能得到HH、HV、VH和VV四个极化通道的SAR图像,就能得到每个散射单元的极化散射矩阵,可以研究散射单元的极
18、化散射特性。不同的地貌极化散射特性不同。3.2.1 真实孔径雷达46真实孔径雷达分辨率47地距分辨率:斜距分辨率:脉冲宽度:俯角方位分辨率:波瓣角;R: 斜距。:波长成正比D: 天线孔径3.2.2 合成孔径雷达基本思想:用一个小天线作为单个辐射单元,将此单元沿一直线不断移动。在移动中选择若干个位置,在每个位置上发射一个信号,接收相应发射位置的回波信号贮存记录下来。存贮时同时保存接收信号的幅度和相位。 4849合成孔径雷达(Synthetic Aperture Radar - SAR)特点:在距离向上,采用脉冲压缩(与真实孔径雷达相同)在方位上,采用合成孔径原理合成孔径基于多普勒效应(Doppl
19、er effect)当目标与观测者之间有相对运动时,观测者接收到的频率与波源发出的频率不同,二者之差为多普勒频移。互相接近时,频率增加,远离时频率减少。比较真实孔径雷达天线的长度是实际长度,雷达波的发射和接收都是以其自身有效长度的效率直接反映到显示纪录中;合成孔径雷达用一个小天线作为单个辐射单元 ,记录每个反射信号。真实孔径天线在一个位置上接收目标的回波;合成孔径天线是在不同位置上接收同一地物的回波信号。真实孔径天线接收目标回波后,好像物镜那样聚合成像;合成孔径天线对同一目标的信号不是在同一时刻得到,在每一个位置上都要记录一个回波信号。 50SAR的方位分辨率51合成后天线孔径为:SAR方位分
20、辨率:由于双程相移:合成孔径雷达的方位分辨力与距离无关,只与实际使用的天线孔径有关 方位分辨率定义:52真实孔径雷达:合成孔径雷达:3.2.3 侧视雷达图像的几何特征 斜距投影 53侧视雷达图像在垂直飞行方向(y)的像点位置是以飞机的目标的斜距来确定,称之为斜距投影。图像点的斜距算至地面距离为:几何特点垂直于飞行方向的比例尺变形压缩与拉长高差产生的投影差雷达立体图像的构像特点54垂直于飞行方向的比例尺55表示为:考虑到实测的斜距是按 比例尺缩小为影像,因此在侧视方向上的比例尺为:560,比例尺大90,比例尺小垂直飞行方向(y)的比例尺由小变大变形压缩与拉长57造成山体前倾,朝向传感器的山坡影像
21、被压缩,而背向传感器的山坡被拉长(与中心投影相反),还会出现不同地物点重影现象。58Geometric Distortions in RADAR高差产生的投影差59高差产生的投影差与中心投影影像投影差位移的方向相反,位移量也不同。时, 大于0,反之为负。投影差改正:雷达立体图像的构像特点从不同摄站对同一地区获取的雷达图像也能构成立体影像。由于是侧视,所以同一侧或异侧都能获取和构成立体像对。对同侧获取的雷达图像立体对,由于高差引起的投影差与中心投影片方向相反;如果按摄影位置放置像片进行立体观测,看到的将是反立体图像;将左右立体图像换位放置,看到的是正立体。603.2.4 INSARINSAR就是利用SAR在平行轨道上对同
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 2024天津市饲料及添加剂买卖合同范本
- 2024学校食堂供货合同范本学校食堂供货合同模板
- 肱骨髁上骨折护理常规
- 2024外贸购销合同模板下载
- 2024年安神补脑类药物项目建议书
- 2024年HITECOAT高耐蚀耐磨化学镀镍磷合金钢板材合作协议书
- 桩基础施工方案
- 2024年直流传动矿井提升机合作协议书
- 2024年石油钻采井口装备合作协议书
- 2024年油份测定仪项目合作计划书
- 放疗效果评价的规范与流程
- 湘教版必修第二章第一节流水地貌课件
- 《荷花》基于标准的教学设计
- 成交高手:大推销员的成交法则和秘诀
- 甘肃省考行测真题及答案2023
- 客户关系管理ppt课件-客户关系管理课件
- “魏家凉皮”运营手册(修正版)
- 乃哟乃说课稿
- 2023年FURUNOECDISMultipleChoiceTest古野电子海图题库测试题
- 中小学幼儿园新生肺结核调查表
- 离心泵技术规格书
评论
0/150
提交评论