



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、FANUC机器人做快速校准参考位作业指导书DONGFENGPEUGEONCITROENAUTOMOBILECOMPANYLTD.FANUCL器人设置快速校准参考位作业指导书2012-12-24修改记录版本号编/改者审核者单位生效日期页数V1UWH1/STG/MFR2012-12-24FANUC机器人做快速校准参考位作业指导书DONGFENGPEUGEONCITROENAUTOMOBILECOMPANYLTD.0、备份机器人程序。1、创建一个T_ZERO_REF轨迹Buiy100%口.ECmk.Id,昌工一口TZEROPEFLUTETEABORTEDJ0INuSelect67732bye45tr
2、ie30/3DHo.辽eikh12TRAJJ1CT_T7Jri_CiPlC0J13IHJLJ4I_T73_SJ:l_OFiaiOi114ILLJ5T二ieei二匚cmciciIfTRAJ5f&TftB_SFE_ClF100J16IWJW2PTHo?2KiAAfiiTpneIV匕tupt.wan甲-inJ.J13TVJJPD01VpddfT:Gq0ngUDl113I_CBS.TAPLCCallIIMiDJStoTC*IRVWPLCC*UUHGTIPjZ1I_LAW7IIDJLJDILADCHFimiE2T二RL工XUJDEP.EPLIT二陋fctTIljZ4工二:pipihs日工EEtri口01
3、幻3二glzeT_FIPBJEBR_T73_SB1E7工二RHPR工旦日EOeBZ3E1T-Kmti4JE9工siwIPJLJDESERVICE130ETTPtjCMATEDELETEATTR2、增加一个轨迹点Busy-Jruon.Cun飞T.1Um1/0T2EJ50MFLLNE0T2AHOftTEDG1JOlJi100%T_ZER0_REFPDIT4TSPOTronehup3、选择POSITION,查看点,选择repre-joint.人】=AnT2EP.0BEFLINE0T2IBOHTED1DD”Etuii匕CudWld口IZQ-T2ER0REFPBECPluTF:FU7:JJIdegJ+y
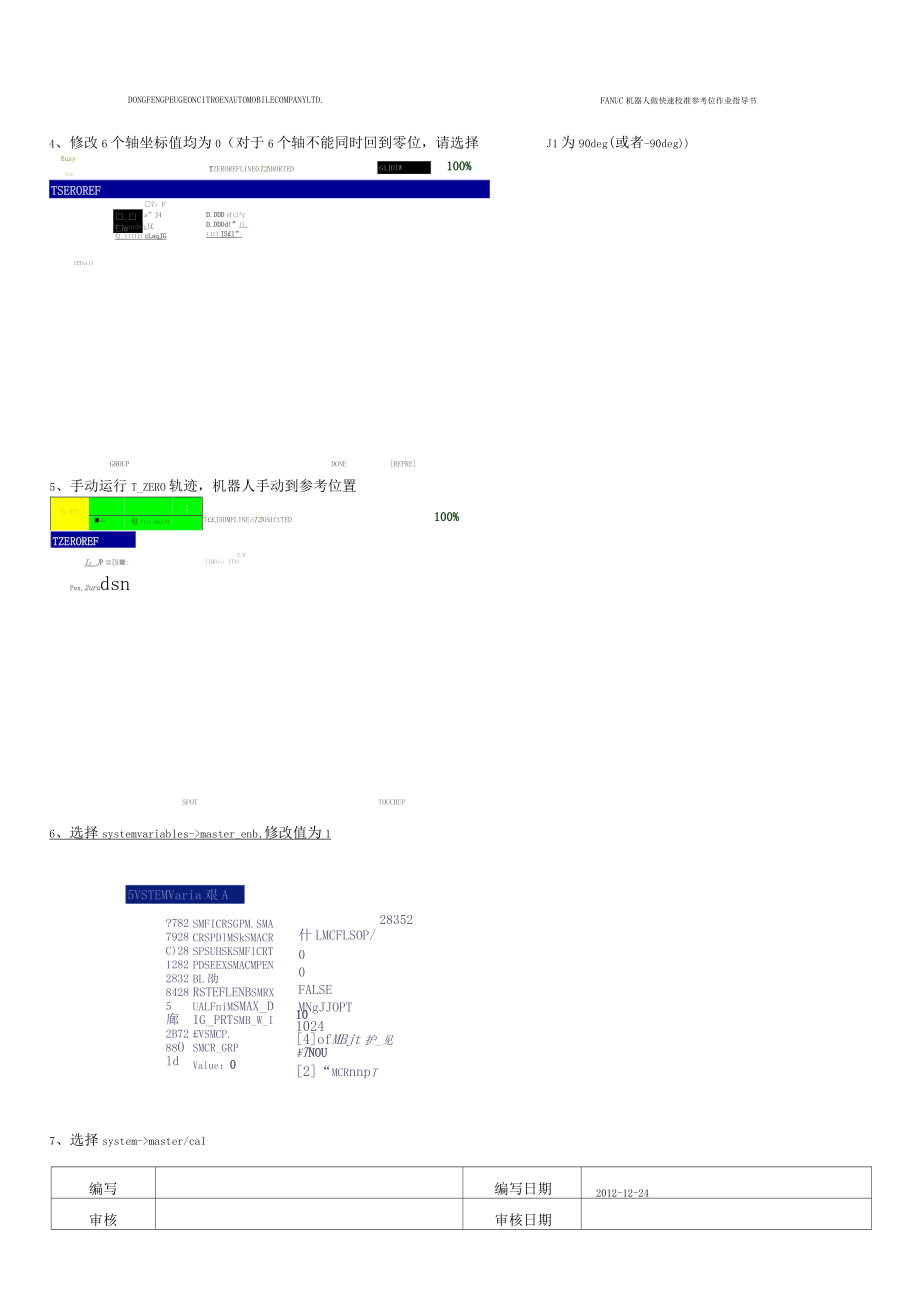
4、e画眄*j”s勺J2Q.OQO皿0*.*H”J30.口口口16a.中pojiclQBPicai.1GROUPDOtJERIPRE!编写编写日期2012-12-24审核审核日期FANUC机器人做快速校准参考位作业指导书J1为90deg(或者-90deg)DONGFENGPEUGEONCITROENAUTOMOBILECOMPANYLTD.4、修改6个轴坐标值均为0(对于6个轴不能同时回到零位,请选择BusySunTZEROREFLINE0T2ABORTEDG1JOIW100%TSEROREF.a7:Fa”J4d.aaadaqJ灯.口口口cLaqJGD.DDD讨已勺D.DDDd!”口.口口ISl”
5、IETniilGROUPDONEREPRE5、手动运行T_ZERO轨迹,机器人手动到参考位置E:Uf7rian电VtiildmI/OTZEROREFTJ50MFLINE6T2AHdftTEDI;JP噩5:Pex,2urudsn100%Z/EIQOii:ITNtSPOTTOUCHUP6、选择systemvariables-master_enb,修改值为15VSTEMVaria艰A?7827928C)281282283284285廊2B7288OldSMFICRSGPM.SMACRSPDlMSkSMACRSPSUHSKSMFlCRTPDSEEXSMACMPENBL劭rsteflenbSMRXUAL
6、FniMsmax_dig_prtSMB_W_IVSMCP.SMCR_GRPValue:028352什LMCFLSOP/00FALSEMNgJJOPT1010244ofMBjt护_见TNOU2“mcrnnpt编写编写日期2012-12-24审核审核日期7、选择system-master/calDONGFENGPEUGEONCITROENAUTOMOBILECOMPANYLTD.DPCA/UWH1/STG/MFRFANUC机器人做快速校准参考位作业指导书8、光标移动到5,选择yes,确认当前位置为快速校准参考位置选才iDONE,完成设置快速参考点工作FANUC机器人做快速校准参考位作业指导书DON
7、GFENGPEUGEONCITROENAUTOMOBILECOMPANYLTD.9、备份机器人程序。并拍下此时机器人姿态图。10、进入系统参数system-DMR_GRP1查看并记录值Busy1_1rn100%昌wIProd1IITESTLINE0T2MOTTEXSYSTEMVariablesSdm_grp17/201?MASTEE_DONETRUE2$OT_M工而S9ofBOOLEAN3$0T二FLUSSofBOOLEAN45HASTER_COUN9cfINTEGER5$REFJ50HEFALSE6$REF)0S9RERL7$REF二COURT9ofINTEGERB$BCKLSH_SIGU9
8、ofBOOLEAN9$EACHMST_DOIff9ofINTEGER105SPC_C0UNT9ofINTEGER11$SPC-MOVE9ofEDOLE悬NCALIBRATIONQUICKMASTER$REF-POS$MASTER-COUN11=?$REF-COUNT11=?1=?$MASTER-COUN22=?$REF-COUNT22=?2=?$MASTER-COUN33=?$REF-COUNT33=?3=?$MASTER-COUN44=?$REF-COUNT44=?4=?$MASTER-COUN55=?$REF-COUNT55=?5=?$MASTER-COUN66=?$REF-COUNT66=?6=?附:机器人零位位置参考1轴零位2轴零位编写编写日期2012-12-24审核审核日期DONGFENGPEUGEONCITROENAUTOMOBILECOMPANYLTD.DPCA/UWH1/S
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 2025年结构化布线系统的检测设备合作协议书
- 四川省泸州外国语学校2025届高三考前热身化学试卷含解析
- 2025年掺铒光纤放大器项目合作计划书
- 农用机械安全管理要求
- 三年级数学计算题专项练习汇编及答案
- 2025年航天器数管系统项目合作计划书
- 如何制定护理诊断
- 2025年图像存储与通讯系统(PACS)合作协议书
- 陕西艺术职业学院《线性代数B》2023-2024学年第二学期期末试卷
- 陕西警官职业学院《大数据与财务分析》2023-2024学年第二学期期末试卷
- 青少年心理咨询的特殊挑战试题及答案
- 学校信息化设备运维服务方案
- 2025-2030中国奶茶店设备全套行业市场现状分析及竞争格局与投资发展研究报告
- 2025年江苏财经职业技术学院单招职业技能测试题库附答案
- 2025年中国人寿招聘笔试笔试参考题库附带答案详解
- 2024-2025学年高中化学上学期第十四周 化学反应速率教学实录
- 2025年初中地理中考押题卷(含解析)
- 2025年湖南省长沙市开福区审计局招聘4人历年高频重点模拟试卷提升(共500题附带答案详解)
- 人教PEP版英语五年级下册全册教案
- 交通大数据分析-深度研究
- 上海市建设工程施工图设计文件勘察设计质量疑难问题汇编(2024 版)
评论
0/150
提交评论