



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、辽宁工程技术大学机电传动与控制课程综合训练项目报告综合训练项目 基于PLC控制机床搬运机械手的设计 指 导 教 师 李建刚 院(系、部) 机械学院 专 业 班 级 机电14-4 组 别 第六组 学 号 1407060430 姓 名 张旭东 日 期 2016.11 一、综合训练项目任务书 综合训练项目 基于PLC控制机床搬运机械手的设计目的和要求:加强对PLC控制线路的多机拖动系统的理解;应用PLC控制的基本理论和方法;提高分析和解决实际工程问题的能力。促成“富于探索精神,具有较强的自学能力、开拓创新意识和敏锐的观察事物以及分析处理事物的能力”的目标实现。成果形式:基于PLC控制机床搬运机械手设
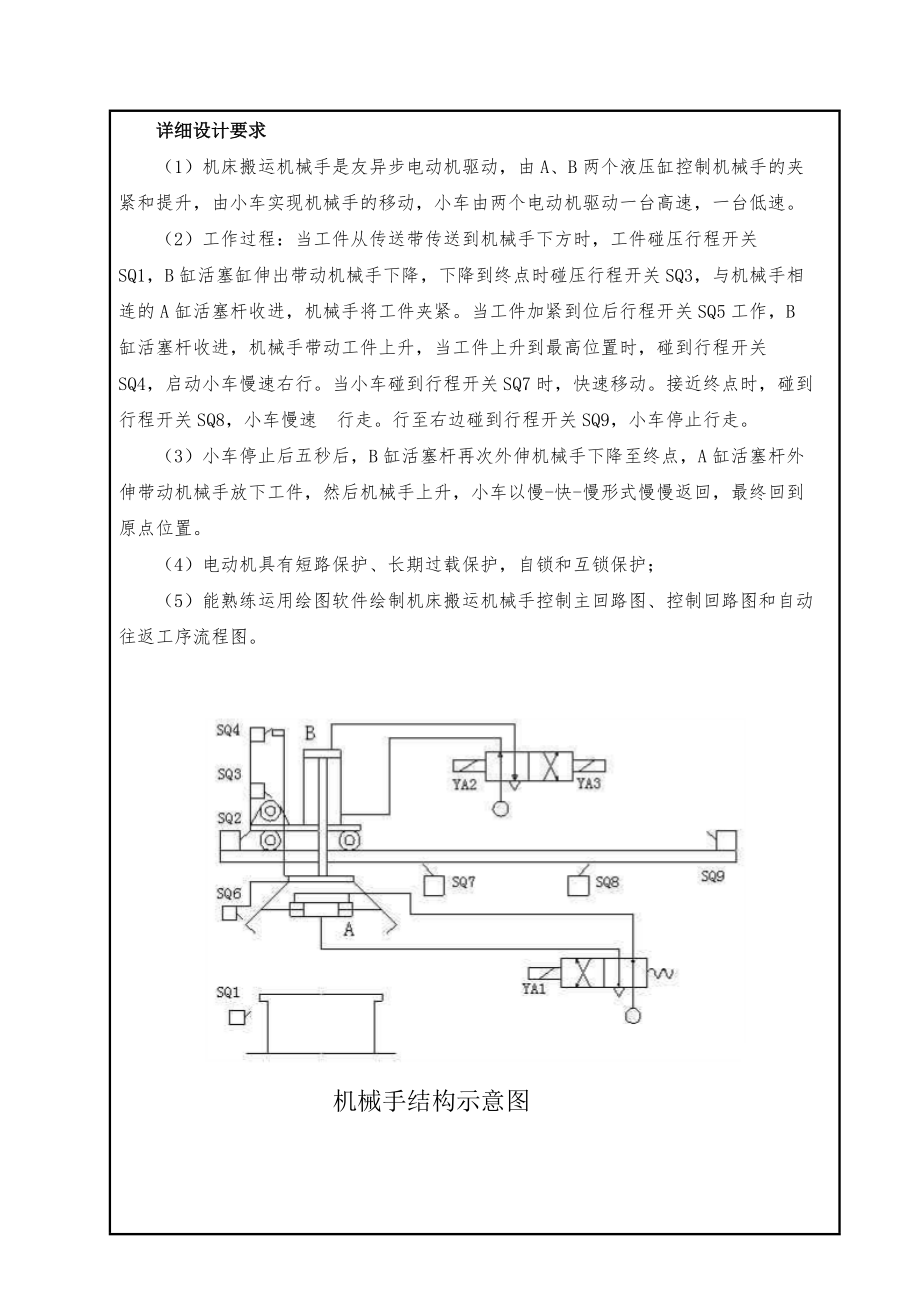
2、计说明书 主回路和控制回路的图纸 液压回路的设计图 相关参数:搬运机械手基本参数如下:工件质量零件尺寸最大移动速度最小移动速度最大回转速度°平均移动速度平均回转速度伸缩行程最大工作半径升降行程详细设计要求(1)机床搬运机械手是友异步电动机驱动,由A、B两个液压缸控制机械手的夹紧和提升,由小车实现机械手的移动,小车由两个电动机驱动一台高速,一台低速。 (2)工作过程:当工件从传送带传送到机械手下方时,工件碰压行程开关SQ1,B缸活塞缸伸出带动机械手下降,下降到终点时碰压行程开关SQ3,与机械手相连的A缸活塞杆收进,机械手将工件夹紧。当工件加紧到位后行程开关SQ5工作,B缸活塞杆收进,机
3、械手带动工件上升,当工件上升到最高位置时,碰到行程开关SQ4,启动小车慢速右行。当小车碰到行程开关SQ7时,快速移动。接近终点时,碰到行程开关SQ8,小车慢速 行走。行至右边碰到行程开关SQ9,小车停止行走。(3)小车停止后五秒后,B缸活塞杆再次外伸机械手下降至终点,A缸活塞杆外伸带动机械手放下工件,然后机械手上升,小车以慢-快-慢形式慢慢返回,最终回到原点位置。(4)电动机具有短路保护、长期过载保护,自锁和互锁保护;(5)能熟练运用绘图软件绘制机床搬运机械手控制主回路图、控制回路图和自动往返工序流程图。 机械手结构示意图 二、指导教师评阅意见 指导教师签字:3、 综合训练项目设计内容(需另加
4、附页)1.机床搬运机械手简介:机械手:mechanicalhand,也被称为自动手,auto hand 能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工 具的自动操作装置。它可代替人的繁重劳动以实现生产的机械化和自动化,能在 有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工 和原子能等部门。 机械手主要由手部、运动机构和控制系统三大部分组成。手部是用来抓持工 件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而 有多种结构形式,如夹持型、托持型和吸附型等。运动机构,使手部完成各种转 动(摆动)、移动或复合运动来实现规定的动作,改变被抓持
5、物件的位置和姿势。 运动机构的升降、伸缩、旋转等独立运动方式,称为机械手的自由度 。为了抓取 空间中任意位置和方位的物体,需有6 个自由度。自由度是机 械手设计的关 参数。自由度越多,机械手的灵活性越大,通用性越广,其结构也越复杂。一般 专用机械手有23 个自由度。 机械手的种类,按驱动方式可分为液压式、气动式、电动式、机械式机械手; 按适用范围可分为专用机械手和通用机械手两种;按运动轨迹控制方式可分为点 位控制和连续轨迹控制机械手等。 机械手通常用作机床或其他机器的附加装置,如在自动机床或自动生产线上 装卸和传递工件,在加工中心中更换刀具等,一般没有独立的控制装置。有些操 作装置需要由人直接
6、操纵,如用于原子能部门操持危险物品的主从式操作手也常 称为机械手。机械手在锻造工业中的应用能进一步发展锻造设备的生产能力,改 善热、累等劳动条件。,在工业生产中,专用机床是工件大批量生产的有效工具,数控机床、加工中心等是工件多品种小批量生产的重要装备。但除切削加工等工艺外,还有大量的装卸、搬运、装配等作业,有待于进一步实现自动化。若将PLC 控制运用于工业机械手,实现了机床之间高温、笨重等工件的搬运,使高温、笨重等工件的搬运过程自动化,则可代替人手做繁重劳动,减轻工人的劳动强度,改善劳动条件。为作业的自动化,提高劳动生产率,保障工人人身安全奠定了基础。 2.机床搬运机械手研究现状在现代工业中,
7、生产过程的机械化、自动化已成为突出的主题。在机械工业中,加工、 装配等生产是不连续的。专用机床是大批量生产自动化的有效办法,程控机床、数控机床、 加工中心等自动化机械是有效解决多品种小批量生产自动化的重要办法。 但除切削加工本身外,还有大量的装卸、搬运、装配等作业,有待于进一步实现机械化。 据资料介绍,美国生产的全部工业零件中,有75是小批量生产;金属加工生产批量中有四 分之三在50 件以下,零件真正在机床上加工的时间仅占零件生产时间的5。从这里可看出, 装卸、搬运等工序机械化的迫切性,工业机械手就是为实现这些工序的自动化而产生的。机械手可在空间抓放物体,动作灵活多样,适用于可变换生产品种的中
8、、小批量自动化生产, 广泛应用于柔性自动线。 3机床搬运机械手的应用意义在机械工业中,机械手的应用意义可以概括如下: 1.可以提高生产过程的自动化程度 应用机械手,有利于提高材料的传送、工件的装卸、刀具的更换以及机器的装配等的自 动化程度,从而可以提高劳动生产率,降低生产成本,加快实现工业生产机械化和自动化的 步伐。 2.可以改善劳动条件、避免人身事故在高温、高压、低温、低压、有灰尘、噪声、臭味、 有放射性或有其它毒性污染以及工作空间狭窄等场合中,用人手直接操作是有危险或根本不 可能的。而应用机械手即可部分或全部代替人安全地完成作业,大大地改善了工人的劳动条 件。在一些动作简单但又重复作业的操
9、作中,以机械手代替人手进行工作,可以避免由于操 作疲劳或疏忽而造成的人身事故。 3.可以减少人力,便于有节奏地生产 应用机械手代替人手进行工作,这是直接减少人力的一个侧面,同时由于应用机械手可 以连续地工作,这是减少人力的另一个侧面。因此,在自动化机床和综合加工自动生产线上, 目前几乎都设有机械手,以减少人力和更准确地控制生产的节拍,便于有节奏地进行生产。 综上所述,有效地应用机械手是发展机械工业的必然趋势。机床搬运手的发展现状及趋势 目前,国内外各种机械手和机械手的研究成为科研的热点,其研究的现状和大体趋势如下: 一机械结构向模块化、可重构化发展。 二工业机械手控制系统向基于PC机的开放型控
10、制器方向发展,便于标准化、网络化;器件集成度提高,结构小巧,且采用模块化结构;大大提高了系统的可靠性、易操作性,而且维修方便。 三机械手中的传感器作用日益重要,除采用传统的位置、速度、加速度等传感器外,还引进了视觉、听觉、接触觉传感器,使其向智能化方向发展。 四关节式、侧喷式、顶喷式、龙门式喷涂机械手产品标准化、通用化、模块化、系列化设计;柔性仿形喷涂机械手开发,柔性仿形复合机构开发,仿形伺服轴轨迹规划研究,控制系统开发; 五焊接、搬运、装配、切割等作业的工业机械手产品的标准化、通用化、模块化、系列化研究;以及离线示教编程和系统动态仿真。 总的来说,大体是两个方向:其一是机械手的智能化,多传感
11、器、多控制器,先进的控制算法,复杂的机电控制系统;其二是与生产加工相联系,性价比高,在满足工作要求的基础上,追求系统的经济、简洁、可靠,大量采用工业控制器,市场化、模块化的元件。 5.设计要求(1)机械手手爪是根据机械手作业要求来设计的。既根据其应用场合设计手爪,在满 足作业要求的前提下,机械手手爪还要求体积小、重量轻、结构紧凑。(2)机械手手爪的万能性与专用性是矛盾的。万能手爪在结构上很复杂,甚至很难 实现,从工业实际应用出发,应着重开发各种专用的、高效率的机械手 手爪, 加之以快速更换装置,以实现机械手的多种作业功能,而不主张用一个万能的手 爪去完成多种作业,以考虑设计的经济效益。(3)机
12、械手手爪的通用性。通用性是指有限的手爪,可适用于不同的机械手,这 就要求末端执行器要有标准的机械接口(如法兰),使末端执行器实现标准化。 (4) 机械手手爪要便于安装和维修,易于实现计算机控制。6. 机床搬运机械手电气控制设计机床搬运机械手控制电路主要是基于PLC控制的,由继电器控制电路参与控制,这里只说明继电器电路控制。该电路包含主电路和控制电路,主电路由两台电动机,慢速电动机M1和快速电动机M2,分别拖动小车慢速和快速行走。其控制过程为:慢速电动机M1由接触器KM1和KM2控制其正转和反转,快速电动机M2由KM3和KM4控制正转和反转。机械手的夹紧和放松是由两位四通电磁阀控制的液压缸来完成
13、。当工件从传送带传送到机械手下方时,工件碰压行程开关SQ1,B缸活塞缸伸出带动机械手下降,下降到终点时碰压行程开关SQ3,与机械手相连的A缸活塞杆收进,机械手将工件夹紧。当工件加紧到位后行程开关SQ5工作,B缸活塞杆收进,机械手带动工件上升,当工件上升到最高位置时,碰到行程开关SQ4,启动小车慢速右行。当小车碰到行程开关SQ7时,快速移动。接近终点时,碰到行程开关SQ8,小车慢速 行走。行至右边碰到行程开关SQ9,小车停止行走。小车停止后五秒后,B缸活塞杆再次外伸机械手下降至终点,A缸活塞杆外伸带动机械手放下工件,然后机械手上升,小车以慢-快-慢形式慢慢返回,最终回到原点位置。参看下图:图中九
14、个行程开关SQ1-SQ9主要检测小车,工件以及机械手的位置和机械手的夹紧放松状态。SQ1和SQ2检测工件SQ3和SQ4检测小车位置SQ5和SQ6检测机械手夹紧放松SQ7和SQ8转换小车速度为小车停止开关机床搬运机械手液压回路的设计 机械手动作顺序: 从原位开始右转升降臂下降伸缩臂伸出夹持器夹紧升降臂上升左转升降臂下降夹持器松开伸缩臂缩回升降臂上升,到原位。若为单循环模式下运行,则原位等待,若为连续循环模式,则进入下一个周期。上述动作均由行程开关或压力继电器发讯号控制相应的电磁换向阀,按程序依次顺序动作而实现。 机械手的动作周期机床搬运机械手控制方案设计本设计主要是对机械手进行有序的控制,提高搬
15、运工作的准确性、安全性。 主要由PLC 来进行控制,通过步进电机,直流减速电机,电磁阀来控制搬运机 械手的运动。 由于PLC的抗干扰能力强,所以能在恶劣的工作环境中,可靠地完成控制任务, 为了使设备便于安装、调试,以及从经济角度考虑,设计出如下图所示的机械手控 制系统的功能框图。 机械手完成以上工艺主要是通过机械控制来实现的,即利用PLC控制电动机的转 动、步进电机的运行和电磁阀的通断,电动机的转动来驱动机械手臂和夹手的旋转和 回转,步进电机控制机械手的上升、下降、伸出和回缩,电磁阀驱机械手爪的夹紧和放松。 机械手控制系统的功能框图机床搬运机械手选型. 电动机选型步进电机最大特点是它接受数字控
16、制信号(电脉冲信号),并转换成与之相对应的 角位移或直线位移。它本身就是一个完成数字/模拟转换的执行组件。而且它可开环 位置控制,输入一个脉冲信号就得到一个规定的位置增量,这样的所谓增量位置控制 系统与传统的直流伺服系统相比,其成本明显降低,几乎不必进行系统调整。步进电 机在精密小型电动机中是一种应用最为广泛的机种。本次用到的步进电机为 2S42Q-02940。(1)慢速电动机M1的运动要求:电动机能实现正反转运动。(2)快速电动机运动要求:能实现正反转。(3)液压泵电动机运动要求:主要配合液压系统来完成摇臂的夹紧与放松。对电动机的效率要求高(功率因数大)对电机的使用寿命也有较高的要求。继电器
17、选型继电器是一种控制元件,它主要用来反映各种控制信号,其触点通常接在控制电 路中。本课题选用JZ11型继电器,具体技术参数参见下表:型号吸引线圈额定电压吸引线圈消耗功率触电额定电流触电数量直流,直流行程开关行程开关主要用于检测工作机械的位置,发出命令以控制其运动方向或行程长 短,行程开关也称位置开关。行程开关按结构分为机械结构的接触式有触电行程开关 和电气结构的非接触式接近开关。接触式行程开关靠移动物体碰撞行程开关的操作头 而使行程开关的常开触电接通和常闭触电分断,从而实现对电路的控制作用。在本课 题中选用KW-7型行程开关。低压断路器低压断路器又称自动开关。它是按规定条件,对配电电路,电动机
18、或其他用电设 备实行不频繁通断操作,线路切换,自动分断电路的开关电器,这种开关相当于刀开 关,熔断器,热继电器和欠电压继电器的组合,并具有良好的灭弧性能,所以它是低 压配电系统中的主要电器元件,作为线路及电源设备过载,欠电压及短路保护用。 在本课题中选用DZ15-40/1型低压断路器。融断器选用 主要依据负载的保护特性和短路电流的大小选择熔断器的类型。对于容量小的电动机和照明支线,常采用熔断器作为过载及短路保护,因而希望熔体的熔化系数适当小些。通常选用铅锡合金熔体的RQA系列熔断器。对于较大容量的电动机和照明干线,则应着重考虑短路保护和分断能力。通常选用具有较高分断能力的RM10和RL1系列的
19、熔断器;当短路电流很大时,宜采用具有限流作用的RT0和RTl2系列的熔断器。 熔体的额定电流可按以下方法选择: (1)保护无起动过程的平稳负载如照明线路、电阻、电炉等时,熔体额定电流略大于或等于负荷电路中的额定电流。 (2)保护单台长期工作的电机熔体电流可按最大起动电流选取,也可按下式选取: IRN (1.52.5)IN 式中IRN-熔体额定电流;IN-电动机额定电流。如果电动机频繁起动,式中系数可适当加大至33.5,具体应根据实际情况而定。(3)熔断器的级间配合 为防止发生越级熔断、扩大事故范围,上、下级(即
20、供电干、支线)线路的熔断器间应有良好配合。选用时,应使上级(供电干线)熔断器的熔体额定电流比下级(供电支线)的大12个级差。 常用的熔断器有管式熔断器R1系列、螺旋式熔断器RLl系列、填料封闭式熔断器RT0系列。电动机: 单台直接起动电动机 熔体额定电流(1.52.5)×电动机额定电流。 多台直接起动电动机 总保护熔体额定电流(1.52.5)×各台电动机电流之和。 降压起动电动机 熔体额定电流(1.52)×电动机额定电流。 绕线式电动机 熔体额定电流(1.21.5)×电动机额
21、定电流。 配电变压器低压侧 熔体额定电流(1.01.5)×变压器低压侧额定电流。该电路选用GF1-4A R719 16/P接触器的选择 (1) 选择接触器的种类 通常先根据接触器所接触的电动机及负载电流类别来选择相应的接触器型,即交流负载应使用交流接触器,直流负载应使用直流接触器;如果控制系统中主要是交流电动机,而直流电动机或直流负载的容量比较小时,也可全用交流接触器进行控制,但是触点的额定电流应适当选择大一些。 (2) 选择接触器主触点的额定电压 通常选择接触器主触点的额定电压应大于或等于负载贿赂的额定电压。通常电压等级分为交流接触器380、660及
22、1140V;直流接触器220V,440V,660V. (3)选择接触器主触点的额定电流 接触器控制电阻性(如电热设备)时,主触点的额定电流应等于负载的工作电流。 接触器控制电动机时,主触点的额定电流大于或稍大于电动机的额定电流。接触器设计时规定的使用类别来确定。 可根据经验公式:Ic= Pn/KUnIc-接触器主触点电流Pn-被控制电动机额定功率Un-被控制电动机转速K-经验系数(11.4) 接触器如使用在频繁启动,制动和频繁正反转场合时,容量应增大一倍以上去选择接触器。 (4)选择接触器吸引线圈的电压: 电磁线圈的额定电压等于控制回路的电源,通常按电压等级分:交流线圈:36、100、127、
23、220、220、380V 直流线圈:24、48、110、220、440V 选用时,一般交流负载用交流吸引线圈接触器,直流负载用直流吸引线圈的接触器, 但交流负载频繁动作时,可采用支流吸引线圈的接触器。 接触器吸引线圈电压若从人身和设备安全角度考虑,可选择低一些,但当控制电路简 单,线圈功率较小时,为了节省变压器,则可选用220或380V。 5. 选择接触器的触点数量 接触器的特点数量应满足控制线路的要求。各种类型的接触器触点数量不同。交流接触器的主触点有三对(常开触点),一般选用四对辅助触点(两对常开),最多可达到六对(三对常开,三对常闭)。直流接触器主触点一般有两对(尚开触点);辅助触点有四
24、对(两对常开,两对常闭)。该电路接触器选CJT1-10热继电器的选型 ()热继电器的额定电流:选择时一般应等于或略大于电动机的额定电流;对于过载能力较弱且散热较困难的电动机,热继电器的额定电流为电机额定电流的70%左右。如果热继电器与电动机的使用环境温度不一致时,应对其额定电流作相应调整:当热继电器使用的环境温度高于被保护电动机的环境温度15以上时,应选择大一号额定电流等级的热继电器;当热继电器使用的环境温度低于被保护电动机的环境温度15以上时,应选择小一号额定电流等级的热继电器。(2)热元件的额定电流,选择时一般应略大于电动机的额定电流,取11125倍,对于反复短时工作、操作频率高的电动机取
25、上限。如果是过载能力弱的小功率电机,由于其绕组的线径小,过热能力差,应选择其额定电流等于或略小于电动机的额定电流。如果热继电器与电动机的环境温度不一致(如两者不在同一室内),热元件的额定电流同样要作调整,调整的情况与上述热继电器额定电流的调整情况基本相同。该电路选用JR16-20/3D电路分析主电路 开启总电源开关QS1,按下零压起动按钮SB2,零压起动继电器供电,同时零压起动指示灯HL1亮。当电压消失或降低过多时,零压起动继电器释放,触点断开,控制电路断电,当电压重新恢复时,零压起动继电器仍不能得到供电,欲使电机重新工作,需再将零压起动按钮SB2按下,使零压起动继电器吸合,而保证控制电路供电。将转换开关QS2闭合,液压泵电机即转动。 控制电路机床搬运机械手是友异步电动机驱动,由A、B两个液压缸控制机械手的夹紧和提升,由小车实现机械手的移动,小车
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 陶瓷制品订购协议三篇
- 智能物流系统投资合同三篇
- 信阳师范大学《热力学与统计物理》2022-2023学年第一学期期末试卷
- 信阳师范大学《变态心理学》2022-2023学年第一学期期末试卷
- 小班节日文化的教育传承计划
- 手术室主管工作计划
- 汽车燃料运输合同三篇
- 新余学院《编舞技法》2022-2023学年第一学期期末试卷
- 西南林业大学《家具设计基础》2021-2022学年第一学期期末试卷
- 信阳师范大学《Python语言程序设计实验》2022-2023学年第一学期期末试卷
- 消费者调查访谈提纲模板
- 野菜文案策划方案
- 消化道肿瘤的诊断和治疗
- 嵌入式基础实训报告
- 软件定义网络(SDN)应用
- 我国农村土地承包经营权纠纷及其解决
- 《项目的范围管理》课件
- 《好作文的标准》课件
- 《华为投资控股公司财务风险防范的案例分析》15000字
- 林果产业发展实施方案
- 部编版六年级语文上册期末复习计划教案
评论
0/150
提交评论