



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、第一章第一章 平面机构的结构分析平面机构的结构分析11.1 研究机构结构的目的研究机构结构的目的1.2 机构组成原理机构组成原理构件、运动副、运动链和机构1.3 机构运动简图的绘制机构运动简图的绘制1.4 平面机构自由度分析平面机构自由度分析1.5 平面机构的组成原理和结构分析平面机构的组成原理和结构分析21.1 研究机构结构的目的研究机构结构的目的研究机构结构的目的?研究机构结构的目的?n 探讨机构运动的可能性以及机构具有确定运动的条件; (机构由哪几部分组成?各部分如何组成?怎样的结构才能保证具有确定的相对运动?) 这对于设计新的机构尤为重要。n 将繁多的机构按结构加以分类,并按这种分类建
2、立运动分析和动力分析的一般方法;n 绘制机构运动简图(仅考虑构件连接特征和与运动有关的尺寸,用尽可能简单的线条和符号绘制机构运动简图) 目的是为机构的运动分析和动力分析做准备。31.2 机构组成原理机构组成原理构件构件、运动副、运动链、机构1.1.构件(构件(Component)零件零件 是机器中的一个独立制造单元体;是机器中的一个独立制造单元体;构件构件 是机器中的一个独立运动单元体。是机器中的一个独立运动单元体。构件是机构的基本组成单元,机构可看作由若干个构件组合而构件是机构的基本组成单元,机构可看作由若干个构件组合而成并具有成并具有确定相对运动确定相对运动的构件组合体的构件组合体任何机器
3、都是由许多零件组合而成的。 构件往往是由若干零件刚性地联接在一起的独构件往往是由若干零件刚性地联接在一起的独立运动的整体立运动的整体内燃机连杆结构内燃机连杆结构连杆头螺栓螺母垫圈内燃机内燃机连杆体机架机架是固连与参考坐标系并视为是固连与参考坐标系并视为固定不固定不动的动的构件构件;原动构件(原动件):受外力作用并按给定 规律作独立运动的构件从动构件(从动件):其余由原动件带动而 随之运动的构件除机架以外的其他构件均称为除机架以外的其他构件均称为活动构件活动构件活活动动构构件件41.2 机构组成原理机构组成原理构件、运动副运动副、运动链2.2.运动副运动副 (pair)运动副运动副元素元素:两构
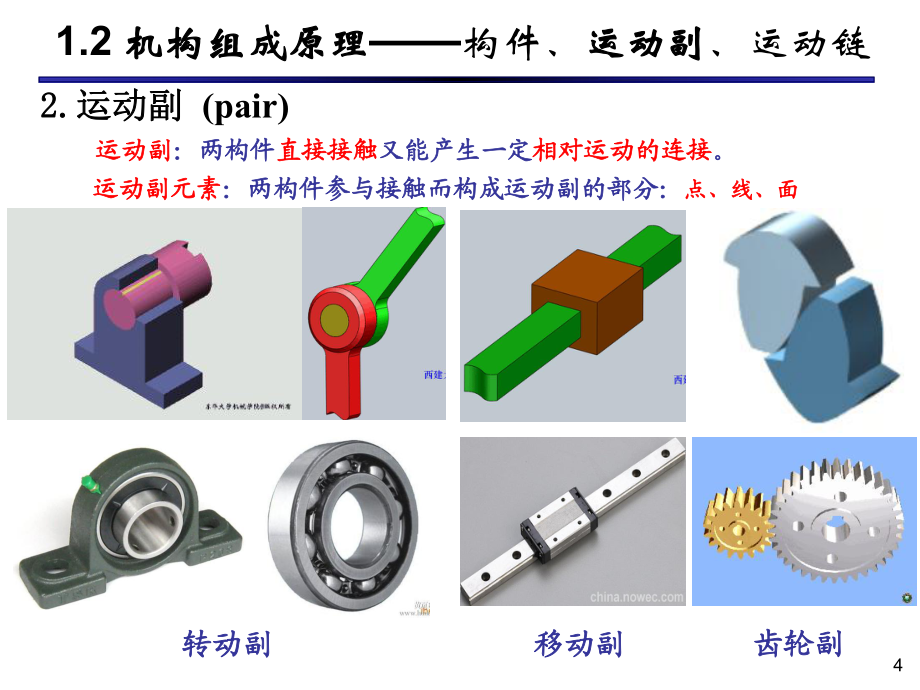
4、件参与接触而构成运动副:两构件参与接触而构成运动副的部分:的部分:点、线、面点、线、面运动副运动副:两两构件构件直接接触直接接触又能产生一定又能产生一定相对运动的连接相对运动的连接。转动副转动副移动副移动副齿轮副齿轮副51.2 机构组成原理机构组成原理构件、运动副运动副、运动链2 2. .运动副运动副 ( (motionpair)运动副的运动副的分类分类2 2)按其相对运动形式分)按其相对运动形式分转动副转动副移动副移动副螺旋副螺旋副球面副球面副还可分为平面运动副平面运动副与空间运动副空间运动副两类。1 1)按其接触)按其接触形式形式高副高副:低副低副:点、线接触的运动副,如齿轮副、凸轮副等面
5、接触的运动副,如转动副、移动副等61.2 机构组成原理机构组成原理构件、运动副、运动链运动链3.3.运动链运动链运动链运动链用运动副将两个或两个以上的构件连接而成的系统用运动副将两个或两个以上的构件连接而成的系统n 闭式运动链闭式运动链(闭链)(闭链):构成运动链的构件形成首末封闭的环链n 开式运动链(开链)开式运动链(开链):构件未构成首末封闭环链开链主要应用于机械手、挖掘机等多自由度的机械之中开链主要应用于机械手、挖掘机等多自由度的机械之中?只是一个构件,不是运动链只是一个构件,不是运动链71.2 机构组成原理机构组成原理构件、运动副、运动链4.4.机构机构机构机构具有具有确定相对运动确定
6、相对运动的运动链的运动链机构机构=机架机架 + 原动件原动件 + 从动件从动件1234机架从动件原动件n指定某一构件为指定某一构件为机架机架n让另一构件(或几个构件)让另一构件(或几个构件)按按给定运动规律相对于机架给定运动规律相对于机架作独立运动作独立运动n其余构件都将作其余构件都将作确定的运动确定的运动运动链运动链+平面机构:机构中各构件的运动平面互相平行平面机构:机构中各构件的运动平面互相平行空间机构:空间机构:机构中至少有一构件不在相互平行的平面上运机构中至少有一构件不在相互平行的平面上运 动,或至少有一构件能在三维空间中运动动,或至少有一构件能在三维空间中运动 分类分类=1个个1个或
7、几个个或几个 若干若干81.3 机构运动简图绘制机构运动简图绘制1. 含义含义n 机构运动简图机构运动简图根据根据机构的运动尺寸,按一定的机构的运动尺寸,按一定的比例尺定出各运动副的位置,用运动副及常用机构比例尺定出各运动副的位置,用运动副及常用机构运动简图符号和构件的表示方法,将机构运动传递运动简图符号和构件的表示方法,将机构运动传递情况表示出来的简图情况表示出来的简图。 作用:1. 表示机械的结构和运动情况。 2. 作为运动分析和动力分析的依据。n 机构示意图机构示意图不严格按比例绘出的,只表示机械不严格按比例绘出的,只表示机械结构状况的简图。结构状况的简图。 在分析和设计机械时,都需要绘
8、出其机构运动简图在分析和设计机械时,都需要绘出其机构运动简图。91.3 机构运动简图绘制机构运动简图绘制内燃机机构简图内燃机机构简图 101.3 机构运动简图绘制机构运动简图绘制根据机构的根据机构的运动尺寸运动尺寸,按一定的比例尺定出,按一定的比例尺定出各运动副各运动副的位置的位置,用,用运动副运动副及常用机构运动简图符号和及常用机构运动简图符号和构件构件的的表示方法,将表示方法,将机构运动传递情况表示出来的简图机构运动传递情况表示出来的简图。111.3 机构运动简图绘制机构运动简图绘制2. 运动副、构件的表示法运动副、构件的表示法转转动动副副表表示示移移动动副副表表示示121.3 机构运动简
9、图绘制机构运动简图绘制2. 运动副、构件的表示法运动副、构件的表示法螺螺旋旋副副表表示示凸凸轮轮副副表表示示131.3 机构运动简图绘制机构运动简图绘制2. 运动副、构件的表示法运动副、构件的表示法齿轮齿轮外外齿齿轮轮蜗蜗轮轮蜗蜗杆杆锥锥齿齿轮轮内内齿齿轮轮141.3 机构运动简图绘制机构运动简图绘制2. 运动副、构件的表示法运动副、构件的表示法摘录自:摘录自:GB4460-84“机构运动简图符号机构运动简图符号”含多个运动副元素的构件含多个运动副元素的构件含两个运动副元素的构件含两个运动副元素的构件151.3 机构运动简图绘制机构运动简图绘制3. 绘制平面机构运动简图的步骤绘制平面机构运动简
10、图的步骤 1)分析机械的实际构造)分析机械的实际构造及运动情况及运动情况,查明,查明构件数构件数,找出,找出机机架和原动件架和原动件、确定、确定各个运动副类型各个运动副类型;2)弄清)弄清运动传递路线运动传递路线,沿着运动传递路线给各构件标号;,沿着运动传递路线给各构件标号;3)选择与多数构件的运动平面平行的平面作为)选择与多数构件的运动平面平行的平面作为绘制投影面绘制投影面;4)选选适当比例尺适当比例尺作出作出各运动副的相对位置各运动副的相对位置,画,画出各出各运动副运动副规定符号规定符号,最后用简单线条或几何图形连接即,最后用简单线条或几何图形连接即成。成。161.3 机构运动简图绘制机构
11、运动简图绘制171.3 机构运动简图绘制机构运动简图绘制181.3 机构运动简图绘制机构运动简图绘制191.3 机构运动简图绘制机构运动简图绘制201.3 机构运动简图绘制机构运动简图绘制211.3 机构运动简图绘制机构运动简图绘制13478 9101118ABCD,221.3 机构运动简图绘制机构运动简图绘制习题:1.3 (a)231.3 机构运动简图绘制机构运动简图绘制习题:1.3 (c)241.3 机构运动简图绘制机构运动简图绘制习题:1.3 (d)251.4 平面机构自由度分析平面机构自由度分析1.4.1 1.4.1 平面机构自由度的计算平面机构自由度的计算机构的自由度:机构的自由度:
12、机构具有确定运动时必须给定的机构具有确定运动时必须给定的独立运独立运动的参数的数目动的参数的数目四杆机构具有一个自由度五杆机构具有两个自由度机构的自由度指相对于机架机构具有机构的自由度指相对于机架机构具有独立运动的数目独立运动的数目,这与这与构件数目构件数目、运动副类型和数量运动副类型和数量有关有关261.4 平面机构自由度分析平面机构自由度分析A一一个不受任何约束的平面运个不受任何约束的平面运动构件有动构件有三个自由度三个自由度xBqBY1.4.1 1.4.1 平面机构自由度的计算平面机构自由度的计算271.4 平面机构自由度分析平面机构自由度分析转动副和移动副等低副的转动副和移动副等低副的
13、引入引入减少了两减少了两个自由度个自由度只能转动只能转动只能某一只能某一方向平动方向平动法线方向不能运动,法线方向不能运动,能沿切线方向平动和能沿切线方向平动和绕接触线、点转动绕接触线、点转动高副的引入减少一个自由度高副的引入减少一个自由度法线切线281.4 平面机构自由度分析平面机构自由度分析自由度计算公式:3n 式中n活动构件数目pl 低副数目(2plph)Fph高副数目1. 两两个活动构件,无约束自由状个活动构件,无约束自由状态情况下:共态情况下:共2*3=6个自由度个自由度2. 转动副转动副A减少了两个自由度减少了两个自由度3. 转动副转动副B减少了两个自由度减少了两个自由度4. 剩下
14、剩下6-2-2=2个自由度个自由度n 机构的自由度机构的自由度机构运动确定时所需的机构运动确定时所需的独立运动独立运动数目数目机构具有确定运动的条件是:机构的原动件数目应等于其自由度的数目1.4 平面机构自由度分析平面机构自由度分析1.4.2 1.4.2 机构机构具有确定性运动的条件具有确定性运动的条件n 原动件以转动副或移动副与机架相连与机原动件以转动副或移动副与机架相连与机架相连,通常架相连,通常每个原动件只能提供一个独每个原动件只能提供一个独立运动的自由度立运动的自由度1.4 平面机构自由度分析平面机构自由度分析1.4.2 1.4.2 机构机构具有确定性运动的条件具有确定性运动的条件F3
15、223 0F3325 -1刚性桁架刚性桁架F33241超静定桁架超静定桁架若自由度F0,机构蜕变为刚性桁架,构件之间没有相对运动原动件原动件=机构自由度机构自由度各各构件确定的相对运动构件确定的相对运动 原动原动件件机构自由度,机构自由度,机构中最薄弱环节可能被毁坏机构中最薄弱环节可能被毁坏1.4 平面机构自由度分析平面机构自由度分析1.4.2 1.4.2 机构机构具有确定性运动的条件具有确定性运动的条件F34252 原动件原动件机构机构自由度,自由度, 机构运动不确定机构运动不确定原动件原动件=机构自由度机构自由度各各构件确定的相对运动构件确定的相对运动综上所述,机构具有确定运动的必要条件:
16、综上所述,机构具有确定运动的必要条件:机构自由度机构自由度大于零,且原动件数与机构自由度数相等大于零,且原动件数与机构自由度数相等。平面机构自由度的计算平面机构自由度的计算2022年5月9日内燃机内燃机机构机构F3n(2plph)36273113478 9101118ABCD,1.4 平面机构自由度分析平面机构自由度分析2022年5月9日F3n(2plph)3527011.4 平面机构自由度分析平面机构自由度分析平面机构自由度的计算平面机构自由度的计算2022年5月9日F3n(2plph)3628111.4 平面机构自由度分析平面机构自由度分析平面机构自由度的计算平面机构自由度的计算2022年
17、5月9日 3DmFE56C4m7281AE1F3n(2plph)3726091.4 平面机构自由度分析平面机构自由度分析计算平面机构自由度时应注意的计算平面机构自由度时应注意的事项事项1. 复合铰链复合铰链?2022年5月9日1.4 平面机构自由度分析平面机构自由度分析计算平面机构自由度时应注意的计算平面机构自由度时应注意的事项事项1. 复合铰链复合铰链:两:两个以上的构件在同一个以上的构件在同一处构成转动副处构成转动副m个构件汇交而成的复合铰链应具有(个构件汇交而成的复合铰链应具有(m-1)个转动副)个转动副几种典型复合铰链几种典型复合铰链 三个构件三个构件汇集汇集而成的铰链实际上包含而成的
18、铰链实际上包含两个转动副两个转动副,往,往往被往被错当做一个转动副错当做一个转动副2022年5月9日 3DmFE56C4m7281AE1F3n(2plph)37210011.4 平面机构自由度分析平面机构自由度分析计算平面机构自由度时应注意的计算平面机构自由度时应注意的事项事项1. 复合铰链复合铰链F3n(2plph)372609 滚子绕其轴线的转动为一个局部自由度。滚子推杆凸轮机构(231)F 3n (2pl ph ) = 33? 2 1.4 平面机构自由度分析平面机构自由度分析计算平面机构自由度时应注意的计算平面机构自由度时应注意的事项事项2. 局部自由度:局部自由度:机构机构中某构件产生
19、中某构件产生局部运动局部运动,但,但与其他构件的运动无关与其他构件的运动无关,这种局部运动产生的自,这种局部运动产生的自由度称为由度称为局部自由度局部自由度把滚子固化在支承滚子的构件上。把滚子固化在支承滚子的构件上。F 321 1 (22)凸轮机构自由度实际为(26)F 3n (2pl ph ) = 34? 0 1.4 平面机构自由度分析平面机构自由度分析计算平面机构自由度时应注意的计算平面机构自由度时应注意的事项事项2. 虚约束:虚约束:机构中某些运动副所引入的约束与其机构中某些运动副所引入的约束与其他约束的作用相同,是他约束的作用相同,是重复约束重复约束,对机构运动起,对机构运动起不到实际
20、作用。不到实际作用。F 33 1 (24)平行四杆机构自由度计算实际为1.4 平面机构自由度分析平面机构自由度分析计算平面机构自由度时应注意的计算平面机构自由度时应注意的事项事项2. 虚约束常见发生情况虚约束常见发生情况两个构件之间组成多个两个构件之间组成多个方向平行的移动副方向平行的移动副两个构件之间组成多个两个构件之间组成多个轴线重合的转动副轴线重合的转动副1.4 平面机构自由度分析平面机构自由度分析计算平面机构自由度时应注意的计算平面机构自由度时应注意的事项事项2. 虚约束常见发生情况虚约束常见发生情况两个构件在多处组成高两个构件在多处组成高副,接触点的法线互相副,接触点的法线互相平行平
21、行不同构件两点间距离保不同构件两点间距离保持恒定持恒定,若在两点间加,若在两点间加上一个构件和两个转动上一个构件和两个转动副,不改变机构运动但副,不改变机构运动但却引入了一个虚约束。却引入了一个虚约束。1.4 平面机构自由度分析平面机构自由度分析计算平面机构自由度时应注意的计算平面机构自由度时应注意的事项事项2. 虚约束常见发生情况虚约束常见发生情况输入件和输出件之间用多组完全相同的运动链输入件和输出件之间用多组完全相同的运动链来传递运动,只有一组起独立传递的作用来传递运动,只有一组起独立传递的作用1.4 平面机构自由度分析平面机构自由度分析计算平面机构自由度时应注意的计算平面机构自由度时应注
22、意的事项事项2. 虚约束常见发生情况虚约束常见发生情况对称结构对称结构2022年5月9日1.4 平面机构自由度分析平面机构自由度分析平面机构自由度的计算平面机构自由度的计算2022年5月9日复合铰链复合铰链局部自由度局部自由度F 371 2 (29)2022年5月9日1.4 平面机构自由度分析平面机构自由度分析平面机构自由度的计算平面机构自由度的计算F 370 1 (210)2022年5月9日1.4 平面机构自由度分析平面机构自由度分析平面机构自由度的计算平面机构自由度的计算2022年5月9日1.4 平面机构自由度分析平面机构自由度分析平面机构自由度的计算平面机构自由度的计算2022年5月9日
23、1.4 平面机构自由度分析平面机构自由度分析平面机构自由度的计算平面机构自由度的计算2022年5月9日1.4 平面机构自由度分析平面机构自由度分析平面机构自由度的计算平面机构自由度的计算2022年5月9日1.4 平面机构自由度分析平面机构自由度分析平面机构自由度的计算平面机构自由度的计算2022年5月9日1.4 平面机构自由度分析平面机构自由度分析平面机构自由度的计算平面机构自由度的计算2022年5月9日1.4 平面机构自由度分析平面机构自由度分析平面机构自由度的计算平面机构自由度的计算2022年5月9日1.4 平面机构自由度分析平面机构自由度分析平面机构自由度的计算平面机构自由度的计算541
24、.5 平面机构的组成原理和结构分析平面机构的组成原理和结构分析1.5.1 1.5.1 平面机构的组成原理和结构分析平面机构的组成原理和结构分析高副低代:高副低代:平面机构中的高副根据一定的条件被用低副(转动平面机构中的高副根据一定的条件被用低副(转动副或移动副)虚拟的代替。副或移动副)虚拟的代替。2r1A31nO2r2nB代换代换原则原则: : 代换前后机构代换前后机构的的自由度自由度和和运动参数运动参数必须完全相同必须完全相同代换代换方法方法: : 用一个构件和两个转动副替代高副,两个转动副位用一个构件和两个转动副替代高副,两个转动副位于组成高副的两个构件曲率中心于组成高副的两个构件曲率中心
25、O132A1B4O2551.5.1 1.5.1 平面机构的组成原理和结构分析平面机构的组成原理和结构分析高副低代(高副低代(1)32A1B4O1O2O12r1A31nO2r2nBC曲率圆曲率圆 由于组成高副的构件由于组成高副的构件轮廓各处曲率中心的位置是不同的轮廓各处曲率中心的位置是不同的,会随接触点改变而改变,因此会随接触点改变而改变,因此高副低代是一个高副低代是一个瞬时代换瞬时代换,不同,不同位置有不同的瞬时替代机构。位置有不同的瞬时替代机构。1.5 平面机构的组成原理和结构分析平面机构的组成原理和结构分析561.5.1 1.5.1 平面机构的组成原理和结构分析平面机构的组成原理和结构分析
26、若高副两元素之一为若高副两元素之一为一点一点,则因其则因其曲率半径为零曲率半径为零,所以曲率中,所以曲率中心与两构件的心与两构件的接触点重合接触点重合123ACBO1n(O2)nAO1O22413B高副低代(高副低代(2)1.5 平面机构的组成原理和结构分析平面机构的组成原理和结构分析1.4 平面机构自由度分析平面机构自由度分析1.5.1 1.5.1 平面机构的组成原理和结构分析平面机构的组成原理和结构分析高副低代(高副低代(3)123BO1AO2C23BO1AC41直线直线的曲率中心在无穷的曲率中心在无穷远处远处转动副在无穷远处转动副在无穷远处1.4 平面机构自由度分析平面机构自由度分析1.
27、5.1 1.5.1 平面机构的组成原理和结构分析平面机构的组成原理和结构分析高副低代(高副低代(3)123BO1AO2C23BAC41 若若两构件接触轮廓之一为一直线,因两构件接触轮廓之一为一直线,因直线的曲率中心在无穷远处直线的曲率中心在无穷远处,所以两构件在所以两构件在无穷远处的转动副将转化为垂直半径方向的移动副无穷远处的转动副将转化为垂直半径方向的移动副。23BO1AC41591.5.1 1.5.1 平面机构的组成原理和结构分析平面机构的组成原理和结构分析高副低代高副低代例题例题1.5 平面机构的组成原理和结构分析平面机构的组成原理和结构分析601.5.1 1.5.1 平面机构的组成原理
28、和结构分析平面机构的组成原理和结构分析高副低代高副低代例题例题1.5 平面机构的组成原理和结构分析平面机构的组成原理和结构分析611.5.2 1.5.2 平面机构的组成原理平面机构的组成原理1.5 平面机构的组成原理和结构分析平面机构的组成原理和结构分析机构机构具有确定运动的条件是具有确定运动的条件是原动件数自由度原动件数自由度。F=1F=0nPl23杆组应该满足的杆组应该满足的条件条件: :3,2 lPn6,4 lPn9,6 lPn杆组杆组去掉原动件,剩余自由度为零的部分杆件系统去掉原动件,剩余自由度为零的部分杆件系统 :级杆级杆组组: 级杆组级杆组运动副数运动副数构件数构件数任何一个机构均
29、可拆分为一个或若干个杆组和原动件任何一个机构均可拆分为一个或若干个杆组和原动件F=11.5.2 1.5.2 平面机构的组成原理平面机构的组成原理1.5 平面机构的组成原理和结构分析平面机构的组成原理和结构分析3, 2 lPn级杆级杆组:组:基本杆组基本杆组自由度为零且不能再分割的杆组自由度为零且不能再分割的杆组 1.5.2 1.5.2 平面机构的组成原理平面机构的组成原理1.5 平面机构的组成原理和结构分析平面机构的组成原理和结构分析4,6lnP级杆级杆组:组:基本杆组基本杆组自由度为零且不能再分割的杆组自由度为零且不能再分割的杆组 机构结构分析的步骤:机构结构分析的步骤: 计算计算机构的自由度,确定原动件。机构的自由度,确定原动件。 从从远离原动件的地方开始拆杆远离原动件的地方开始拆杆组。先试拆组。先试拆级组,当不可能级组,当不可能时再试拆时再试拆级组。但应注意,级组。但应注意,每拆出一个杆组后,每拆出一个杆组后,剩下的部剩下的部分仍组成机构分仍组成机构,且自由度与原,且自由度与原机构相同,直至全部杆组拆出机构相同,直至全部杆组拆出只剩下只剩下级级机构(机架和原动机构(机架和原动件组成的机构)件组成的机构)。 确定确定机构的级别。机构的级别。71324568级杆组级杆组 级机构级机构1.5
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 临床护理专业小组建设与管理
- 防火涂料包工协议书
- 节目演出安全协议书
- 饭店散伙转让协议书
- 订单合同融资协议书
- 银行股东分红协议书
- 公交车联合经营协议书
- 通校学生安全协议书
- 隔离酒店租用协议书
- 转让经营项目协议书
- 2025购销茶叶合同范本
- 山东济南历年中考作文题与审题指导(2005-2021)
- 武汉各区2023-2024学年九下化学四调压轴题分类汇编-第8题选择题
- 脑血管造影术的术前及术后护理
- 外墙涂料施工劳务合同范本(8篇)
- 成人重症患者颅内压增高防控护理专家共识2024
- 老产品芯片1-gc2145d模组设计指南
- 广东省中山市20222022学年下学期期末考试八年级英语试卷
- 油脂制取与加工工艺学
- 创新创业指导把握创业机会课件
- 第三章工程师的责任 工程伦理学课件
评论
0/150
提交评论