



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、9.1 降电压调速降电压调速9.4 变频调速变频调速第第 9 章章 三相异步电动机的调速三相异步电动机的调速9.2 绕线式异步电动机转子串电阻调速绕线式异步电动机转子串电阻调速9.3 鼠笼式三相异步电动机变极调速鼠笼式三相异步电动机变极调速9.5 电磁转差离合器电磁转差离合器得到异步电动机调速方法得到异步电动机调速方法异步电动机异步电动机变极调速变极调速鼠笼电机鼠笼电机变转差率变转差率 s s 调速调速调调( (降降) )压调速压调速滑差电机调速滑差电机调速( (电磁离合器调速电磁离合器调速) )转子串电阻调速转子串电阻调速变频调速变频调速116011fnnssp由异步电动机转速的表达式由异步
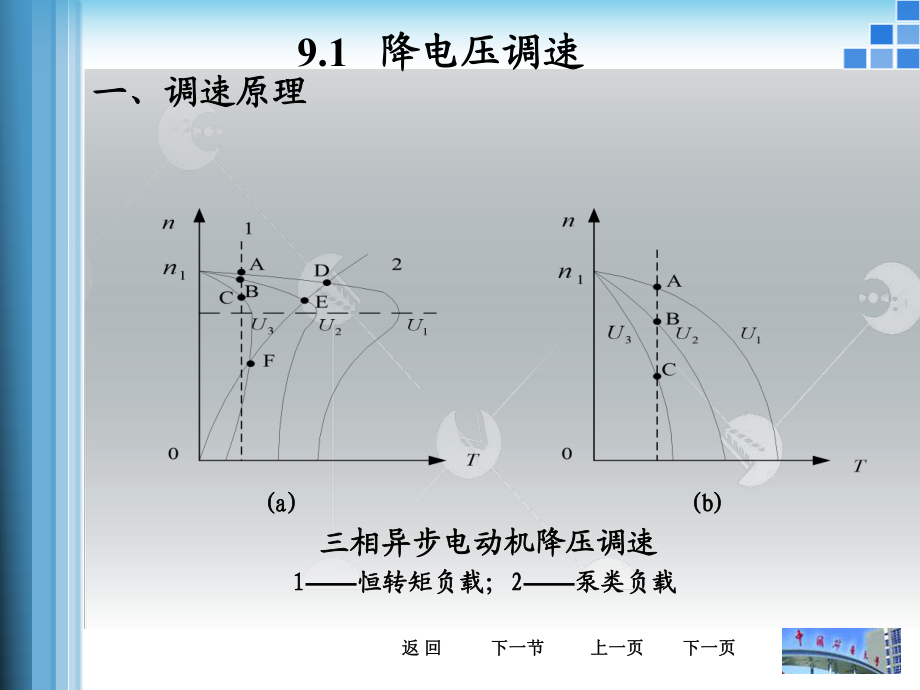
2、电动机转速的表达式上一页上一页下一页下一页 三相异步电动机降压调速三相异步电动机降压调速 1 1恒转矩负载;恒转矩负载;2 2泵类负载泵类负载9.1 降电压调速降电压调速一、调速原理一、调速原理(a) (b)(a) (b)上一页上一页下一页下一页返返 回回下一下一节节 图图( (a a) )所示,如果电动机拖动恒转矩性质负载,所示,如果电动机拖动恒转矩性质负载,A A点为固有机械特性上的运行点,点为固有机械特性上的运行点,B B和和C C点为降低电点为降低电压后的运行点压后的运行点. .可见。降压调速方法比较简单,但可见。降压调速方法比较简单,但是,如电压进一步降低,最大转矩减小很快,即使是,
3、如电压进一步降低,最大转矩减小很快,即使负载特性与机械特性有交点,负载能力严重下降,负载特性与机械特性有交点,负载能力严重下降,负载稍有波动,电机就会停转;而且对于一般的鼠负载稍有波动,电机就会停转;而且对于一般的鼠笼式异步电动机,降压调速范围很窄,没有多大实笼式异步电动机,降压调速范围很窄,没有多大实用价值。用价值。 为此,可以采取增加转自电阻和引入速度闭为此,可以采取增加转自电阻和引入速度闭环加以改善。环加以改善。9.1 降电压调速降电压调速一、调速原理一、调速原理上一页上一页下一页下一页返返 回回下一下一节节二、高转差率异步电动机的降压调速分析二、高转差率异步电动机的降压调速分析 如果要
4、求电动如果要求电动机有较宽的调速范机有较宽的调速范围,则应选用高转围,则应选用高转差率电动机,如高差率电动机,如高转差率鼠笼电机。转差率鼠笼电机。它们具有图它们具有图( (b b) )所所示的机械特性。示的机械特性。9.1 降电压调速降电压调速 值得注意的是,这种软机械特性的电机,在高速运行值得注意的是,这种软机械特性的电机,在高速运行时,由于转差率较普通电机的大,运行效率要低些;低速时,由于转差率较普通电机的大,运行效率要低些;低速运行时,由于降低了供电电压,为保持恒转矩负载,需要运行时,由于降低了供电电压,为保持恒转矩负载,需要更大的电流,除降低效率外,还应注意过热的问题。更大的电流,除降
5、低效率外,还应注意过热的问题。上一页上一页下一页下一页返返 回回下一下一节节9.1 降电压调速降电压调速三、特点三、特点1.1.恒转矩负载:恒转矩负载:调速范围小调速范围小。 解决方法:定子降电压与转子串电阻调速相解决方法:定子降电压与转子串电阻调速相 结合;或采用高转差率电机。结合;或采用高转差率电机。3.3.缺点:电动机在低速运行时,效率和功率因数缺点:电动机在低速运行时,效率和功率因数很低,电机发热问题严重。很低,电机发热问题严重。2.2.泵类负载:降压调速有较好的泵类负载:降压调速有较好的调速效果调速效果。 应注意:电动机在低速运行时存在过电流及应注意:电动机在低速运行时存在过电流及功
6、率因数低的问题。功率因数低的问题。上一页上一页下一页下一页返返 回回下一下一节节9.2 绕线式异步电动机转子串电阻调速绕线式异步电动机转子串电阻调速一、调速原理一、调速原理nT01nlT2r12Rr +22Rr +32Rr +ABCN绕线式异步电动机转子串电阻调速绕线式异步电动机转子串电阻调速上一页上一页下一页下一页返返 回回下一下一节节9.2 绕线式异步电动机转子串电阻调速绕线式异步电动机转子串电阻调速二、调速电阻的计算二、调速电阻的计算同一转矩下:转差率之比同一转矩下:转差率之比=电阻之比电阻之比计算依据:计算依据:nT01nlT2r12Rr +22Rr +32Rr +ABCN上一页上一页
7、下一页下一页返返 回回下一下一节节 1. 1.调速范围不大调速范围不大:这种调整方法对应的最高转:这种调整方法对应的最高转速不超过理想空载转,低速运行时机械特性太软,速不超过理想空载转,低速运行时机械特性太软,静差度大,因而限制了调速范围静差度大,因而限制了调速范围. . 2. 2.平滑性差平滑性差:由于转子回路电流很大,使电阻:由于转子回路电流很大,使电阻的体积笨重,抽头不易,所以调速的平滑性也不好的体积笨重,抽头不易,所以调速的平滑性也不好, ,基本上属有级调整基本上属有级调整. . 3. 3.经济性:这种方法简单、容易实现,初期投经济性:这种方法简单、容易实现,初期投资较少。但低速运行时
8、效率低。资较少。但低速运行时效率低。sspPPCumM:1:1:29.2 绕线式异步电动机转子串电阻调速绕线式异步电动机转子串电阻调速三、特点三、特点上一页上一页下一页下一页返返 回回下一下一节节 4. 4.调速方式:调速方式:恒转矩调速恒转矩调速。当电源电压仍为。当电源电压仍为额定电压时,气隙磁通基本保持不变,如果调速额定电压时,气隙磁通基本保持不变,如果调速前转子电流为额定值,希望调速后仍为额定值,前转子电流为额定值,希望调速后仍为额定值,则有:则有: 式中式中R是转子回路所串联的电阻。是转子回路所串联的电阻。 2020222222222()()NEEIrRrxxss+定值9.2 绕线式异
9、步电动机转子串电阻调速绕线式异步电动机转子串电阻调速三、特点三、特点上一页上一页下一页下一页返返 回回下一下一节节上一上一节节 必然有:必然有: 已知电磁转矩为已知电磁转矩为: : 如果保持调速前后转子电流不变,电磁转矩如果保持调速前后转子电流不变,电磁转矩也不变,转子回路串电阻调速适用于恒转矩的系也不变,转子回路串电阻调速适用于恒转矩的系统,属于恒转矩调速方式。统,属于恒转矩调速方式。 转子回路功率因数为:转子回路功率因数为:) ()/ (2/ 22122112211xxsrrfsrpUmT+22NrrRss+常数222222/cosxsRrsRr+上一页上一页下一页下一页返返 回回下一下一
10、节节上一上一节节 当负载为恒转矩性质时,按照电磁转矩的当负载为恒转矩性质时,按照电磁转矩的计算公式:计算公式:211 222/MfPm IrsTp常数常数+NNNxsrsrxsRrsRr222222222222cos/cos9.2 绕线式异步电动机转子串电阻调速绕线式异步电动机转子串电阻调速三、特点三、特点 4. 4.调速方式:调速方式:恒转矩调速恒转矩调速。上一页上一页下一页下一页返返 回回下一下一节节上一上一节节1.1.概念概念: : 变极调速是一种通过改变定子绕组极对数来变极调速是一种通过改变定子绕组极对数来实现转子转速调节的调速方式。在一定电源频率实现转子转速调节的调速方式。在一定电源
11、频率下,由于同步速下,由于同步速 与极对数成反比,因此,与极对数成反比,因此,改变定子绕组极对数便可以改变转子转速。改变定子绕组极对数便可以改变转子转速。pfn116011xa9.3 鼠笼式三相异步电动机变极调速鼠笼式三相异步电动机变极调速一、调速原理一、调速原理变极调速只用于笼型电动机。变极调速只用于笼型电动机。上一页上一页下一页下一页返返 回回下一下一节节上一上一节节以以4 4极变极变2 2极为例:极为例:A A相两个线圈,相两个线圈,顺向串联顺向串联,定子绕组产生定子绕组产生4 4极磁场:极磁场:反向串联反向串联和和反向并联反向并联,定,定子绕组产生子绕组产生2 2极磁场:极磁场:9.3
12、 鼠笼式三相异步电动机变极调速鼠笼式三相异步电动机变极调速一、调速原理一、调速原理2.2.变极原理变极原理 三相异步电动机变极前后定子绕组的接线图三相异步电动机变极前后定子绕组的接线图上一页上一页下一页下一页返返 回回下一下一节节上一上一节节3.3.常用变极接线方式常用变极接线方式YYY,2p-p注意注意:当改变当改变定子绕定子绕组接线组接线时,必时,必须同时须同时改变定改变定子绕组子绕组的相序的相序9.3 鼠笼式三相异步电动机变极调速鼠笼式三相异步电动机变极调速上一页上一页下一页下一页返返 回回下一下一节节上一上一节节3.3.常用变极接线方式常用变极接线方式YYY,2p-p注意注意:当改变当
13、改变定子绕定子绕组接线组接线时,必时,必须同时须同时改变定改变定子绕组子绕组的相序的相序9.3 鼠笼式三相异步电动机变极调速鼠笼式三相异步电动机变极调速上一页上一页下一页下一页返返 回回下一下一节节上一上一节节3.3.常用变极接线方式常用变极接线方式YY,2p-p注意注意:当改变当改变定子绕定子绕组接线组接线时,必时,必须同时须同时改变定改变定子绕组子绕组的相序的相序9.3 鼠笼式三相异步电动机变极调速鼠笼式三相异步电动机变极调速上一页上一页下一页下一页返返 回回下一下一节节上一上一节节3.3.常用变极接线方式常用变极接线方式YY,2p-p9.3 鼠笼式三相异步电动机变极调速鼠笼式三相异步电动
14、机变极调速上一页上一页下一页下一页返返 回回下一下一节节上一上一节节二、变极调速时容许输出二、变极调速时容许输出 容许输出容许输出时是指保持电流为额定值条件下,时是指保持电流为额定值条件下,调速前、后电动机轴上输出的功率和转矩。调速前、后电动机轴上输出的功率和转矩。1.1.Y-YYY-YY联结方式联结方式 Y-YY Y-YY后后, ,极数减少一半极数减少一半, ,转速增大一倍转速增大一倍, ,即即 ,保持每一绕组电流为,保持每一绕组电流为 , ,则输出则输出功率和转矩为功率和转矩为2YYYnn NI2YYYYYYPP ,TT9.3 鼠笼式三相异步电动机变极调速鼠笼式三相异步电动机变极调速上一页
15、上一页下一页下一页返返 回回下一下一节节上一上一节节1.1.Y-YYY-YY联结方式联结方式 Y-YY Y-YY后后, ,极数减少一半极数减少一半, ,转速增大一倍转速增大一倍, ,即即 ,保持每一绕组电流为,保持每一绕组电流为 , ,则输出则输出功率和转矩为功率和转矩为2YYYnn NI2YYYYYYPP ,TT9.3 鼠笼式三相异步电动机变极调速鼠笼式三相异步电动机变极调速 可见,可见,Y-YYY-YY联结方式时,电动机的转速增大联结方式时,电动机的转速增大一倍,容许输出功率增大一倍,而容许输出转矩一倍,容许输出功率增大一倍,而容许输出转矩保持不变,所以这种变极调速属于恒转矩调速,保持不变
16、,所以这种变极调速属于恒转矩调速,它适用于恒转矩负载。它适用于恒转矩负载。上一页上一页下一页下一页返返 回回下一下一节节上一上一节节2.2.-YY-YY联结方式联结方式 -YY-YY后后, ,极数减少一半极数减少一半, ,转速增大一倍转速增大一倍, ,即即 ,保持每一绕组电流为,保持每一绕组电流为 , ,则输则输出功率和转矩为出功率和转矩为2YYnn NI1 150 58YYYYP.PT.T 可见,可见,-YY-YY联结方式时,电动机的转速增大联结方式时,电动机的转速增大一倍,容许输出功率近似不变,而容许输出转矩一倍,容许输出功率近似不变,而容许输出转矩近似减少一半,所以这种变极调速属于恒功率
17、调近似减少一半,所以这种变极调速属于恒功率调速,它适用于恒功率负载。速,它适用于恒功率负载。9.3 鼠笼式三相异步电动机变极调速鼠笼式三相异步电动机变极调速上一页上一页下一页下一页返返 回回下一下一节节上一上一节节三、变极调速时的机械特性三、变极调速时的机械特性1.Y1.Y-YY-YY联结方式联结方式22mYYmYmYYmYsYYsYssTTTT 变极调速时变极调速时, ,转速几乎是成倍变化的转速几乎是成倍变化的, ,调速的平滑性较调速的平滑性较差差, ,但具有较硬的机械特性但具有较硬的机械特性, ,稳定性好稳定性好, , 可用于恒功率和恒可用于恒功率和恒转矩负载转矩负载. .9.3 鼠笼式三
18、相异步电动机变极调速鼠笼式三相异步电动机变极调速上一页上一页下一页下一页返返 回回下一下一节节上一上一节节三、变极调速时的机械特性三、变极调速时的机械特性2. 2. -YY-YY联结方式联结方式 变极调速时变极调速时, ,转速几乎是成倍变化的转速几乎是成倍变化的, ,调速的平滑性较调速的平滑性较差差, ,但具有较硬的机械特性但具有较硬的机械特性, ,稳定性好稳定性好, , 可用于恒功率和恒可用于恒功率和恒转矩负载转矩负载. .9.3 鼠笼式三相异步电动机变极调速鼠笼式三相异步电动机变极调速2323mYYmmYYmstYYstssTTTT 上一页上一页下一页下一页返返 回回下一下一节节上一上一节
19、节四、变极降压调速四、变极降压调速粗调:变极粗调:变极 为了改善变极调速的平滑性,可以综合应用为了改善变极调速的平滑性,可以综合应用变极调速与降压调速。即变极调速与降压调速。即变极变极降压降压调速。调速。9.3 鼠笼式三相异步电动机变极调速鼠笼式三相异步电动机变极调速细调:降压细调:降压 扩大了调速范围,提高了调速平滑性,同时扩大了调速范围,提高了调速平滑性,同时减少了低速损耗。减少了低速损耗。上一页上一页下一页下一页返返 回回下一下一节节上一上一节节9.3 鼠笼式三相异步电动机变极调速鼠笼式三相异步电动机变极调速 绕线式异步电动机绕线式异步电动机转子极对数不能自动随定子转子极对数不能自动随定
20、子极对数变化,如果同时改变定、转子绕组极对数又极对数变化,如果同时改变定、转子绕组极对数又比较麻烦,因此比较麻烦,因此不采用变极调速不采用变极调速。该方法主要适用。该方法主要适用于鼠笼式异步电动机。于鼠笼式异步电动机。 需要说明的是,为了保证变需要说明的是,为了保证变极调速时电动机的转向不变,极调速时电动机的转向不变,变极调速的同时,需变极调速的同时,需要改变绕组的相序或者说是电源的相序。要改变绕组的相序或者说是电源的相序。理由很简理由很简单,要使电动机转向不变,就要求磁通势旋转方向单,要使电动机转向不变,就要求磁通势旋转方向不变。不变。 上一页上一页下一页下一页返返 回回下一下一节节上一上一
21、节节 改变三相异步电动机电源频率,可以改变旋改变三相异步电动机电源频率,可以改变旋转磁通势的同步转速,从而达到调速的目的。如果转磁通势的同步转速,从而达到调速的目的。如果电源频率连续可调,可以平滑调节电动机转速。电源频率连续可调,可以平滑调节电动机转速。 9.4 变频调速变频调速pfn1160对变频调速的要求:对变频调速的要求: (1)(1)主磁通主磁通 ,以防止定子铁心过饱和;,以防止定子铁心过饱和; (2)(2)电动机的过载能力(或最大电磁转矩电动机的过载能力(或最大电磁转矩 )尽可能保持不变。尽可能保持不变。NmmT上一页上一页下一页下一页返返 回回下一下一节节上一上一节节 忽略定子漏阻
22、抗压降,三相异步电动机每相电压忽略定子漏阻抗压降,三相异步电动机每相电压mWkWfEU1111144. 49.4 变频调速变频调速一、从基频向下变频调速一、从基频向下变频调速 如果保持电源电压如果保持电源电压U U1 1为额定值,降低电源频为额定值,降低电源频率率f f1 1 ,则随着,则随着f f1 1下降,气隙每极磁通下降,气隙每极磁通m m增加。增加。电动机磁路本来就刚进入饱和状态,电动机磁路本来就刚进入饱和状态, m m增加,增加,磁路过饱和,励磁电流会急剧增加,电机的功率磁路过饱和,励磁电流会急剧增加,电机的功率因数下降,负载能力减小,甚至导致无法正常运因数下降,负载能力减小,甚至导
23、致无法正常运行。因此,降低电源频率时,必须同时降低电源行。因此,降低电源频率时,必须同时降低电源电压。降低电源电压,有两种控制方法。电压。降低电源电压,有两种控制方法。上一页上一页下一页下一页返返 回回下一下一节节上一上一节节 1. 1.保持保持 常数常数11fE11fE 22221212211122111222222122260rmIm pErm pfEsTnfsfs xrrxsrs+9.4 变频调速变频调速一、从基频向下变频调速一、从基频向下变频调速 降低电源频率的同时,保持降低电源频率的同时,保持 常数,则常数,则1 1= =常数,是恒磁通控制方式。常数,是恒磁通控制方式。 上一页上一页
24、下一页下一页返返 回回下一下一节节上一上一节节令令0dsdT22xrsm常数2211121221LfEpmTm常数pLrpfxrnsnmm60260221221 最大转矩为常数,与频率无关,并且最大转矩对应的最大转矩为常数,与频率无关,并且最大转矩对应的转速落降相等,也就是不同频率的各条机械特性是近似平转速落降相等,也就是不同频率的各条机械特性是近似平行的,硬度相同。行的,硬度相同。 得到:得到:9.4 变频调速变频调速上一页上一页下一页下一页返返 回回下一下一节节上一上一节节保持保持 常数时,变频调速的机械特性常数时,变频调速的机械特性 11fE(1)(1)机械特性机械特性9.4 变频调速变
25、频调速上一页上一页下一页下一页返返 回回下一下一节节上一上一节节 按照容许输出的原则,希望调速前后电动按照容许输出的原则,希望调速前后电动机的转子电流不变,因此有:机的转子电流不变,因此有:2122222222121()()()(2)EEIrrxfLssf+常数22221222212()(2)()()(2)rLCsfrsfCL+222112()1(2) rKsffCL(2)(2)调速方式调速方式9.4 变频调速变频调速上一页上一页下一页下一页返返 回回下一下一节节上一上一节节211121222211122 21 21211 212142m pfETfs xrsrm pfEf rCf LfsCf
26、 r+常数恒磁通变频调速属于恒转矩性质调速方式。恒磁通变频调速属于恒转矩性质调速方式。 (2)(2)调速方式调速方式9.4 变频调速变频调速上一页上一页下一页下一页返返 回回下一下一节节上一上一节节 若驱动恒转矩负载,调速前后的稳定运行状若驱动恒转矩负载,调速前后的稳定运行状态下转子电流不变。由于磁通不变,励磁电流态下转子电流不变。由于磁通不变,励磁电流恒定,定子电流同样不变。即恒定,定子电流同样不变。即NNNIIIITT1122, 1. 1.保持保持 常数常数11fE9.4 变频调速变频调速一、从基频向下变频调速一、从基频向下变频调速上一页上一页下一页下一页返返 回回下一下一节节上一上一节节
27、 当降低电源频率时,保持当降低电源频率时,保持 常数,则气隙常数,则气隙每极磁通每极磁通1 1= =常数。这时电动机的电磁转矩为常数。这时电动机的电磁转矩为11fU2212212121112212211221122xxsrrsrffUpmxxsrrfsrpUmT+ 2. 2.保持保持 常数常数11Uf9.4 变频调速变频调速一、从基频向下变频调速一、从基频向下变频调速上一页上一页下一页下一页返返 回回下一下一节节上一上一节节21122111122111221111212212 2mm pUTfrrxxm p Uffrrxx+ 2. 2.保持保持 常数常数11Uf9.4 变频调速变频调速上一页上
28、一页下一页下一页返返 回回下一下一节节上一上一节节 保持保持U U1 1/ /f f1 1= =常数,当减小常数,当减小f f1 1时,最大转矩不等于常数。已时,最大转矩不等于常数。已知知(x1+ x2)与与f1成正比变化,成正比变化,r1与与f1无关。因此,在无关。因此,在f1接近额定接近额定频率时频率时, ,r1 (x1+ x2) ,随着,随着f1的减小,的减小,Tm减小得不多;但是,减小得不多;但是,当当f1较低时,较低时,(x1+ x2)比较小,比较小,r1相对变大了。随着相对变大了。随着f1的降低,的降低, Tm就减小了。在低频低速的机械特性变坏了。就减小了。在低频低速的机械特性变坏
29、了。 21122111122111221111212212 2mm pUTfrrxxm p Uffrrxx+ 2. 2.保持保持 常数常数11Uf9.4 变频调速变频调速上一页上一页下一页下一页返返 回回下一下一节节上一上一节节保持保持 常数的变频调速机械特性常数的变频调速机械特性11fU(1)(1)机械特性机械特性9.4 变频调速变频调速上一页上一页下一页下一页返返 回回下一下一节节上一上一节节保持保持U U1 1/ /f f1 1= =常数降低频率调速常数降低频率调速近似为恒转矩近似为恒转矩调速调速方式。方式。(2)(2)调速方式调速方式9.4 变频调速变频调速 假定调速过程中功率因数假定
30、调速过程中功率因数 、 均不变,均不变,为了充分利用电动机,每相绕组中的电流应保持为了充分利用电动机,每相绕组中的电流应保持 不变。三相异步电动机的输出功率和输出转矩分别不变。三相异步电动机的输出功率和输出转矩分别满足:满足:1cosNI1111111112)(cosffUUIUmPNN11229550fUnPT上一页上一页下一页下一页返返 回回下一下一节节上一上一节节二、从基频向上变频调速二、从基频向上变频调速 升高频率向上调速时,不能升高电源电压,只能保持电升高频率向上调速时,不能升高电源电压,只能保持电压不变,频率越高,磁通越低,因此是一种弱磁升速的方法,压不变,频率越高,磁通越低,因此
31、是一种弱磁升速的方法,类似他励直流电动机弱磁调速。调速过程中,电动机电磁转类似他励直流电动机弱磁调速。调速过程中,电动机电磁转矩为:矩为:+221221122112xxsrrfsrpUmT9.4 变频调速变频调速上一页上一页下一页下一页返返 回回下一下一节节上一上一节节忽略忽略r1的影响的影响212112112121112111)(221221fxxfpUmxxrrfpUmTm+1211221222121212fLLfrxxrxxrrsm+常数+pfLLfrnsnmm121121602上一页上一页下一页下一页返返 回回下一下一节节上一上一节节保持保持U UN N不变升频调速的机械特性不变升频调
32、速的机械特性二、从基频向上变频调速二、从基频向上变频调速9.4 9.4 变频调速变频调速1.1.机械特性机械特性上一页上一页下一页下一页返返 回回下一下一节节上一上一节节 正常运行时,若保持正常运行时,若保持I1额定不变,额定不变,s s变化就很小,变化就很小,可近似认为可近似认为PM是不变的。属于恒功率调速形式。是不变的。属于恒功率调速形式。pfxxsrrfsrpUmTPM122122112211122+srUmpfsrfpUmPM221112121122二、从基频向上变频调速二、从基频向上变频调速9.4 9.4 变频调速变频调速2.2.调速方式调速方式上一页上一页下一页下一页返返 回回下一下一节节上一上一节节 从基频向下调速,为恒转矩调速方式;从基从基频向下调速,为恒转矩调速方式;从基频向上调速,近似为恒功率调速方式;频向上调速,近似为恒功率调速方式; 调速范围大;调速范围大; 机械特性较硬,静差率小,相对稳定性好;机械特性较硬,静差率小,相对稳定性好; 运行时较小,效率高;运行时较小,效率高; 频率可以连续调节,变频调速为无级调速。频率可以连续调节,变频调速为无级调速
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 寰枕融合的临床护理
- 《2025知识产权许可协议技术合同》
- 《临床护理操作技术》课件
- 生地会考试卷及答案万维
- 上海高一期中试卷及答案
- 山东期中考试试卷及答案
- 深海打捞装备的作业效能评估体系考核试卷
- 硬盘分区与数据恢复考核试卷
- 玩具工厂智能化升级考核试卷
- 玩具设计中的创意原型制作考核试卷
- 工作室股东合同协议
- 关于市中小学“校园餐”突出问题专项整治情况的报告
- SZDB-Z 173-2016 物业绿化养护管理规范
- 艺考全真乐理试题及答案
- 摄影人像知识篇课件
- 急救知识培训课件下载
- 酒店培训技巧
- 2025年北京市海淀区高三一模政治试卷(含答案)
- (完整版)mmse量表
- CDR-临床痴呆评定量表
- (完整版)施工占道施工方案
评论
0/150
提交评论