



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、消声器机器人焊接系统消声器机器人焊接系统技术说明技术说明制造商:厦门思尔特机器人系统有限公司地址:厦门市金龙路 893 号电话3159988传真目 录录1 1 设计依据设计依据.31.1 产品产品.31.2 现场环境信息现场环境信息.32 系统构成概述系统构成概述.42.1 系统布局图系统布局图.42.2 设备构成设备构成.52.3 系统说明系统说明.53 工艺方案工艺方案.63.1 节拍计算(以右图工件为例)节拍计算(以右图工件为例).63.2 工艺分析工艺分析.63.3 电气控制方案电气控制方案.63.4 夹具设计方案夹具设计方案.6
2、4 供货范围供货范围.85 项目进度计划项目进度计划.96 安装调试安装调试.106.1 在思尔特的安装调试在思尔特的安装调试.106.2 在客户处安装调试在客户处安装调试.107 培训培训.118 质保期质保期.129 验收验收.139.1 预验收预验收.139.2 终验收终验收.1310 责任责任.1410.1 买方责任买方责任.1410.2 卖方责任卖方责任.1411 附件一:技术资料附件一:技术资料.1511.1 TA-1400 工业机器人工业机器人 .1511.2 控制柜标准规格控制柜标准规格.1611.3 YM-350GR3 逆变全数字弧焊电源逆变全数字弧焊电源 .161 1 设计
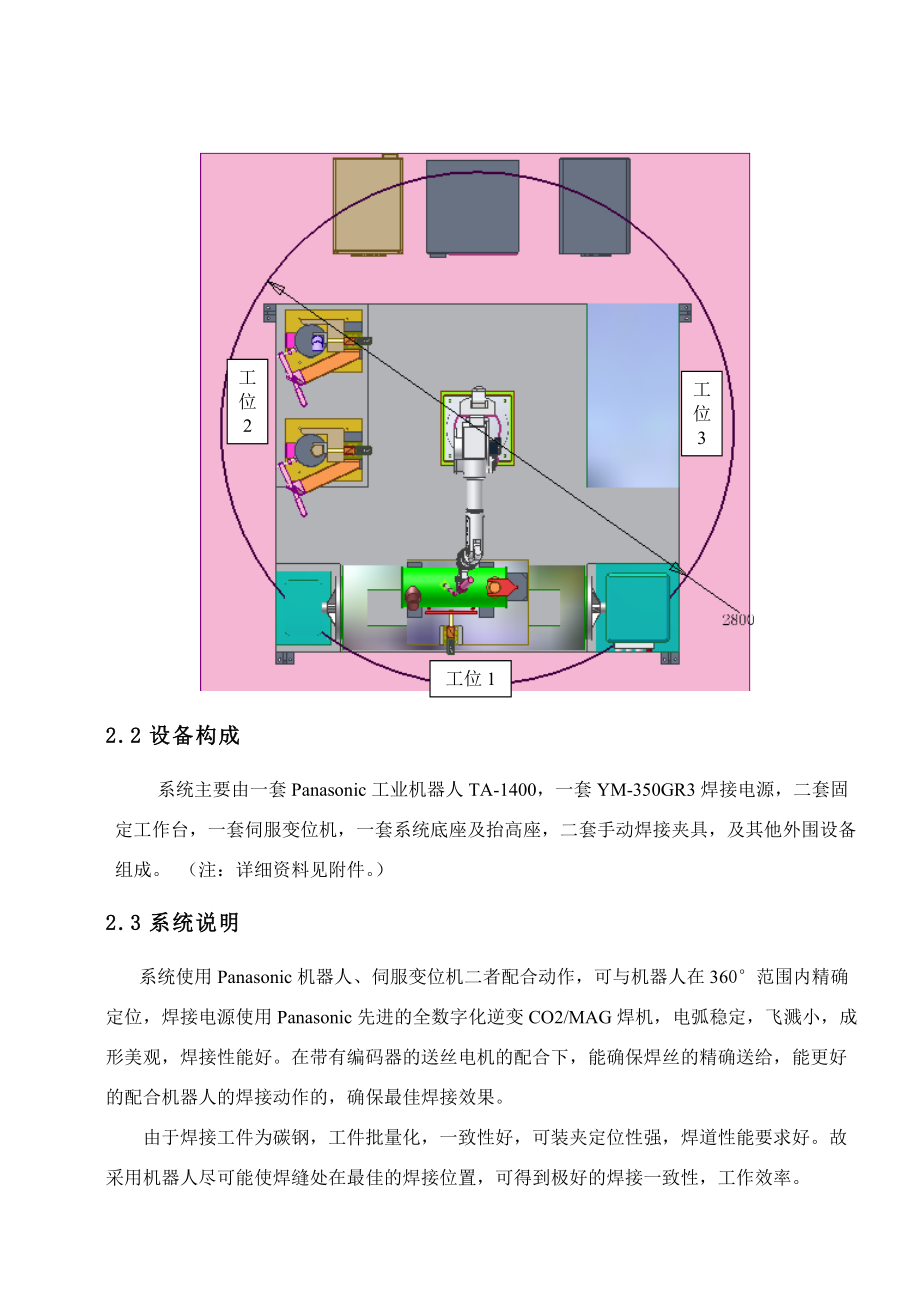
3、依据设计依据1 1. .1 1 产产品品编号名称图号外形/照片毛重(Kg)焊缝长(mm)1消声器 1约 7Kg380mm2消声器 2/注意:工件重复定位尺寸需能保证焊缝位置误差在0.3mm 以内。1 1. .2 2 现现场场环环境境信信息息使用温度: 545电源电压: 380V/220V10% 50HZ压缩空气源: 0.6Mpa2 系系统统构构成成概概述述2 2. .1 1 系系统统布布局局图图系统预估尺寸:长 3200mm,宽 3000mm,高 2300mm。注:以上数据仅供参考,实际尺寸以设计尺寸为准。三三维方案模型俯视图2 2. .2 2 设设备备构构成成 系统主要由一套 Panason
4、ic 工业机器人 TA-1400,一套 YM-350GR3 焊接电源,二套固定工作台,一套伺服变位机,一套系统底座及抬高座,二套手动焊接夹具,及其他外围设备组成。 (注:详细资料见附件。 )2 2. .3 3 系系统统说说明明系统使用 Panasonic 机器人、伺服变位机二者配合动作,可与机器人在 360范围内精确定位,焊接电源使用 Panasonic 先进的全数字化逆变 CO2/MAG 焊机,电弧稳定,飞溅小,成形美观,焊接性能好。在带有编码器的送丝电机的配合下,能确保焊丝的精确送给,能更好的配合机器人的焊接动作的,确保最佳焊接效果。由于焊接工件为碳钢,工件批量化,一致性好,可装夹定位性强
5、,焊道性能要求好。故采用机器人尽可能使焊缝处在最佳的焊接位置,可得到极好的焊接一致性,工作效率。工位2工位 1工位33 3 工工艺艺方方案案3 3. .1 1 节节拍拍计计算算(以以右右图图工工件件为为例例) =380(焊缝长度)/10(焊接速度)+3(机器人焊缝间行走时间)2(焊缝数)+10(机器人进出工位时间)= 54(54(秒秒) )单班产能:10小时360090%(效率)/54=600件件3 3. .2 2 工工艺艺分分析析1)工件在焊接夹具上进行装夹。2)工件在 1#工位上装夹完成后,操作人员按下预约按钮。3)机器人接收信号后进入 1#工位,开始焊接。4)焊接过程变位机翻转多个角度以
6、满足焊缝的焊接要求。5)同时卸下 2#工作台已焊接工件,装夹新工件。6)焊接完成后,机器人转至 2#工位。7)开始新的焊接。3 3. .3 3 电电气气控控制制方方案案1) 工件变位机使用 Panasonic 伺服电机驱动,可在焊接时与机器人配合运动,确保焊缝均处于最佳焊接位置,保证焊接质量。2) 操作人员使用带按钮、状态指示灯的操作盒进行作业。3) 所有电气元件采用国际品牌,确保系统稳定可靠工作:PLC-三菱,低压电器-施耐德,传感器-OMRON。3 3. .4 4 夹夹具具设设计计方方案案焊接夹具为手动夹具,在保证强度的前提下设计为快速装卸的方式,且减少对焊接位置的遮挡。焊接夹具的设计力求
7、模块化和标准化,采用一体式底座,确保各单元相对位置的稳定性。夹具三维模型夹具三维模型 夹具夹具 1 夹具夹具 2 翻转夹具翻转夹具 3夹具与焊接工作台的连接使用快速换模方式,大大方便夹具的更换速度及定位的精确。4 4 供供货货范范围围下表所列的内容为乙方负责提供或制造的设备内容:序 号名 称规 格数量品牌备注1 1机器人本体TA-140011.1TA-140011.2控制器11.3变压器18kVA11.4全数字焊机YM-350GR311.5焊枪 YT-352CAT 1松下2 2系统底座(含抬高座) 1思尔特3 3焊接工作台1思尔特4 4焊接变位机200Kg1思尔特5 5焊接夹具3思尔特6 6电
8、气控制系统1思尔特7 7集成及安装调试1思尔特8 8运输及保险1思尔特5 5 项项目目进进度度计计划划思尔特在合同生效后 60 天内将设备运至客户现场。6 6 安安装装调调试试6 6. .1 1 在在思思尔尔特特的的安安装装调调试试所报的设备,将在发货前,在我方进行组装和完整的功能测试。6 6. .2 2 在在客客户户处处安安装装调调试试我们将派工程师在用户现场进行设备的安装、调试及使用培训。安装计划和技术要求将在安装前 2 周内交给客户。客户应按照要求及时做好准备,以配合发货期,不要因此产生不必要的费用。地基被默认为有足够的强度和刚度。安装前用户应准备好合适的设备安装地。安装调试期间用户应提
9、供必须的工具、材料和人力等,如叉车、电缆、螺栓等。系统应适当与周边设备隔离,并且工作区域会有适当装置安全限制,这部分由买方负责。7 7 培培训训我们提供 4 人周的设备使用培训,受训人员应有一定电脑基础。注: 1)人员要求:机器人操作者中专以上文化,主管技术人员大专以上熟悉英文、计算机。2)对每名学员,提供 Panasonic 机器人操作培训中文教材一套。时间时间培训内容培训内容2 2 天天机器人基础知识机器人基础知识机器人安全知识机器人安全知识机器人基本构成机器人基本构成机器人示教编程,基本内容机器人示教编程,基本内容2 2 天天机器人示教编程,高级内容机器人示教编程,高级内容机器人操作运转
10、机器人操作运转机器人高级功能设定机器人高级功能设定1 1 天天机器人安装、维护注意事项机器人安装、维护注意事项机器人与外部设备间的连接与通讯机器人与外部设备间的连接与通讯理论与操作考试理论与操作考试8 8 质质保保期期本套设备的质保期限为用户最终验收合格后一年。设备发生故障以后,用户应将故障内容以传真形式及时通知厦门思尔特,厦门思尔特在接到通知后以最快速度予以答复。若属正常使用状态下发生的故障破损,对属厦门思尔特责任的只要在上述质保期内,可进行无偿修理或部品更换。 (厦门思尔特指定的消耗品、维护部品及保险管、指示灯等易耗品不在此限。 )质保期结束后,思尔特仍继续终身服务,提供全面的技术支持及所
11、需备品配件。注:如果发生以下情况,不在保修范围之内-没有进行使用说明书中记载的保养、维修及定期检查而发生故障。由于天灾等或其它不可抗力而受的损坏。由于本系统以外的异常而引发的故障。由于误操作,异常运转,及其它不属于本公司责任而引起的故障。9 9 验验收收9 9. .1 1 预预验验收收预验收在思尔特进行(买方提供必要数量的试件) ,双方有关人员参加,验收合格后发货。9 9. .2 2 终终验验收收设备在买方现场安装、调试完成后,双方有关人员一起对设备进行试运行。以下两种情况下,买方与思尔特签定两份验收证明,之后设备转移至买方,质保期开始。1. 设备试运行合格后一周内;2. 设备安装完成 15
12、天内,验收无法完成,但主要原因不在于思尔特。1 10 0 责责任任1 10 0. .1 1 买买方方责责任任买方应承担以下成本:用于电、防护气体和压缩空气的电缆和管道。地基和土建。买方工厂的起重设备,包括操作人员。在卸货、安装、启动时,提供临时帮助人员。在安装、启动和验收阶段,买方应提供电力、热、光、水、人员、电话、传真。在买方工厂进行焊接测试时的焊接损耗。1 10 0. .2 2 卖卖方方责责任任满足合同所写的发货期。保证发出的货物和提供的服务的质量。1 11 1 附附件件一一:技技术术资资料料1 11 1. .1 1 T TA A- -1 14 40 00 0 工工业业机机器器人人 手腕持
13、重: 6 kg最大臂展半径:1.34m轴数: 6 轴重复定位精度:0.1mm机器人版本:标准版轴运动:轴 最大速度 动作范围:1. RT 轴 170/s 最大到达距离 1374mm2. UA 轴 190/s 最小到达距离 352mm3.FA 轴 190/s 前后动作范围 1022mm4.RW 轴 370/s5.BW 轴 3750/s 6.TW 轴 600/s电源:3 相 AC200/220V(+10%,-10%). 耗电量:6 KVA 机器人尺寸: 底座:350X350 mm机器人重量:约 161 kg环境温度:5C- 45C最大湿度:95%最大噪音: 70dB(A)1 11 1. .2 2
14、控控制制柜柜 标标准准规规格格 名 称规 格型号YD-350GR3构造箱型密闭式外形尺寸(W)420X(D)600X(H)530大概质量约 48KG(含示教盒电缆)冷却方式机器人控制部:间接风冷(外界空气不进入设备的内部循环方式)内存容量标准 40000 点(可扩充)位置控制方式软件伺服方式串行 I/FTP:2 个 PCMCIA 卡插口 PS/2控制轴数同时 6 轴输入输出信号专用信号:输入 6 输出 8通用信号:输入 40 输出 40最大输入信号(任选):输入 504 输出 504输入电源3 相 AC200/220V10 6KVA适用焊接电源50kg 1 11 1. .3 3 Y YM M- -3 35 50 0G GR R3 3 逆逆变变全全数数字字弧弧焊焊电电源源名 称规 格型号YM-350GR3输
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 语文(适应)初中教案课件
- 第3单元阅读综合实践(分层练习)(解析版)
- 《保健食品G》课件
- 《鬼谷子纵横术》课件
- 人教版七年级数学下册54平移课件
- 《人力资源建设》课件
- 《创业投资ABC》课件
- 学校监狱共建协议书(2篇)
- 2024年安徽省马鞍山市公开招聘警务辅助人员(辅警)笔试冲刺自测题二卷含答案
- 2021年广西壮族自治区桂林市公开招聘警务辅助人员(辅警)笔试自考练习卷二含答案
- 2024年6月第2套英语六级真题
- 护理责任组长年终总结
- 太阳系中的有趣科学学习通超星期末考试答案章节答案2024年
- 走近湖湘红色人物智慧树知到答案2024年湖南工商大学
- 07SG531钢网架设计图集
- AQ6111-2023个体防护装备安全管理规范
- 教师口语智慧树知到期末考试答案章节答案2024年广州大学
- 思辨与创新智慧树知到期末考试答案章节答案2024年复旦大学
- 2023版押品考试题库必考点含答案
- 成人大专毕业生自我鉴定
- 汽车转向系统设计规范
评论
0/150
提交评论