



下载本文档
版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、-?运动控制系统?课程设计 学 院: 物联网工程学院 班 级: 姓 名: 学 号:同组成员: 日 期: 2021.1.5-2021.1.11 成 绩: 一、感应电机直接转矩控制系统的仿真设计要求:1 分析直接转矩控制的根本工作原理;2 在Matlab/Simulink 环境下建立感应电机直接转矩控制系统的仿真模型;3 在不同给定、负载下进展仿真分析;4 按规撰写课程设计报告。2、 分工安排1. 磊:学习直接转矩控制系统的原理并建立系统仿真模型。2. 尚文:负责利用Matlab软件在Simulink环境下对系统模型进展仿真。3. 於和琦 :分析不同给定、负载下系统的仿真结果并设计报告正文。3、
2、设计心得体会 经过一个多星期的努力, 我们组终于完成了这次运动控制系统的课程设计。通过这么多天的工作,我得到了很多收获,也发现了自己的缺乏之处。 刚拿到这个课题的时候,完全不知道如何入手,后来我们重新学习了相关理论知识才慢慢有了思路。做课设的过程是个自我探索、自我学习的过程,在此期间,我们不仅学到了专业的知识,也提升了自己的学习能力。这次课设收获很大,不仅深入了解了感应电机直接转矩控制,也再一次熟悉了Matlab这个常用软件。调配参数费了很多时间,总是得不到理想的仿真结果,其中需要自己学习很多东西,并在很短的时间融会贯穿,考验了自己的学习能力。我明白了坚持不懈的真正含义,是次难忘的课设。通过以
3、上仿真过程可以看出,采用MATLAB环境下的SIMULINK仿真工具,可以快速地完成一个电动机控制系统的建模、仿真,且无须编程,仿真直观、方便、灵活。异步电动机矢量控制MATLAB仿真实验对于开发和研究交流传动系统有着十分重要的意义,并为系统从设计到实现提供了一条捷径。4、 报告正文如下感应电机直接转矩控制系统的仿真磊江南大学 物联网工程学院, 214122)摘要:直接转矩控制是通过转矩与磁链控制来控制电机的一种方法。本文在对直接转矩控制的根本原理和感应电动机的数学模型进展充分分析的根底上,利用MatlabSimulink建立了感应电机直接转矩控制系统的软件模型,并通过仿真,分析了不同给定、负
4、载对控制系统的影响,仿真结果说明,直接转矩控制系统具有构造简单、转矩响应快、鲁棒性强等优点。关键词:直接转矩控制;MatlabSimulink;感应电动机;仿真Emulation Research of Direct Control of Induction MotorZhang Lei(School of Internet of Things Engineering, Jiangnan University, Wu*i Jiangsu 214122, China)Abstract:Direct torque control is a method of the torque and flu*
5、 control to control the motor. This article in the foundation of full analysis on basic principle andmathematical model of induction motor direct torque control, establishes thesoftware model of direct torque control system of induction motor using Matlab / Simulink, and the simulation, analysis of
6、the different given, the load effect on the control system, the simulation results show that, the direct torque controlsystem has the advantage of has the advantages of simple structure, fast torque response and strong robustness.Keywords: Direct torque control; MatlabSimulink; Induction motor;Simul
7、ation; . z-直接转矩控制技术,德语称为DSR,英语称之 为DSC或DTC,是一种具有高性 能的新型交流调速技术。直接转矩控制技术采用定子磁场定向,减少了感应电机参数变化对控制性能的影响;强调转矩的直接控制效果,把转矩直接作为被控量进展控制;根据定子磁链和转矩偏差直接得到逆变器开关状态,实现对电机输出转矩的控制 因此,直接转矩控制技术与矢量控制比较具有控制构造简单 控制手段直接,信号处理的物理概念明确,具有较高的动态性能等特点。1直接转矩控制系统的原理直接转矩控制系统简称DTCDirect Torque Control系统,是继矢量控制系统之后开展起来的另外一种高动态性能的交流电动机变
8、压变频调速系统。在它的转速环里面利用转矩反响直接控制电机的电磁转矩,因此而得名为直接转矩控制。直接转矩控制作为一种具有快速的动态响应的交流调速策略,其特点是将电磁转矩作为直接被控变量,而不像矢量控制是通过磁场定向和控制定子电流矢量的励磁分量来间接控制电磁转矩,利用离散的逆变器开关电压矢量对定子磁链矢量轨迹控制的同时实现对转矩的直接转矩。如图1为直接转矩控制的原理框图,和VC系统一样,它也是分别控制异步电动机的转速和磁链,转速调节器ASR的输出作为电磁转矩的给定信号,在后面设置转矩控制环,它可以抑制磁链变化对于转矩的影响,从而使得转速和磁链系统实现解耦。因此,从整体控制构造上来看,直接转矩控制D
9、TC系统和矢量控制系统VC系统是一致的都获得了较高质量的动态性能以及静态性能。图1直接转矩控制系统图从图中中可以看出,直接转矩控制系统,就是通过使定转子磁链的幅值保持恒定,然后选择合理的零矢量的作用次序和作用时宽,以调节定子磁链矢量的运动速度,从而改变磁通角的大小,以实现对电机转矩的控制。在直接转矩控制技术中,其根本控制方法就是通过电压空间矢量来控制定子磁链的旋转速度,控制定子磁链走走停停,以改变定子磁链的平均旋转速度 的大小,从而改变磁通角的大小,以到达控制电动机转矩的目的。2感应电动机的数学模型要对感应电机的控制方法进展研究,建立其适当的数学模型和状态方程是研究其控制方法的理论根底。感应电
10、机本身存在着高阶、非线性、强耦合以及多变量的特点,为了建立适当的感应电机电机数学模型,我们对其进展如下假设:(1) 电机的三相定子和转子绕组在空间对称分布,即空间位置互差 120°电角度,相电流产生的磁动势在空间呈正弦分布。 2电机定转子外表光滑,忽略磁路饱和齿槽效应。 3忽略磁路饱和和铁心损耗。 4忽略电机运行过程中频率和温度变化对电机参数产生的影响。 由于直接转矩控制理论基于定子两相静止坐标系下,因此检测电机电压和电流都应在静止坐标系下,因此将在三相静止坐标系下的感应电机状态方程变换到两相静止坐标系下更适于进展研究,两相静止坐标系通常简称为-坐标系,如图 2.1 中a图为三相静止
11、坐标系下的定子电流,b图为两相静止坐标系下的定子电流,三相/两相坐标变换公式如式2.1。图2.1双闭环直流调速系统的在两相静止坐标系下,感应电机数学模型主要包括四个状态方程:异步电机数学电压方程、磁链方程、转矩方程和运动方程,具体方程描述如下:电压方程:磁链方程:转矩方程:可改写为式2.5的形式:运动方程:其中,为两相静止坐标系下定子电压分量,为两相定子电流分量,为两相转子电流分量分别为定、转子电阻,分别为定子自感、转子自感,LM为定转子互感。为两相定子磁链分量,分别为两相转子磁链分量。分别为电磁转矩和负载转矩,J 为电机的转动惯量np为极对数,为电机角速度。3 直接转矩控制系统仿真模型3.1
12、 系统根本构造 图3.1为近似圆形磁链直接转矩控制系统构造图。如图3.1所示,在直接转矩控制中,通过检测定子两相电流、直流母线电压和电机转速进展定子磁链观测计算和转矩计算,使二者分别与给定定子磁链和给定转矩相减,其差值又分别通过各自的滞环比较器相比较而输出转矩和磁链的增、减信号,把这两个信号输入矢量选择单元,即矢量开关表,再加上定子磁链所在的扇区位置就得到了满足磁链为圆形、转矩输出跟随转矩给定的电压矢量。磁链和转矩的滞环可以设置多级,并且其宽度可变,滞环宽度越小,开关频率越高,控制越准确。图3.1 近似圆形磁链控制DTC系统框图3.2 系统仿真实现仿真时直接选用Simulink电气模型库中的绕
13、线式异步电机模型,它的m_SI接口通过测量模块Measurement Demu*可以直接观测到电机定子和转子侧的电压、电流及转速等变量,Tm接口可接入负载转矩。近似圆形磁链控制系统仿真总图如图2所示。图中cilianhuanjie为自己定义的子系统(Subsystem),根据电机定子侧的三相电流和电压经3/2变换计算两相静止坐标系下定子磁链的值以及转矩Te。电机的定子三相电is_abc以及转速Wm可直接通过Measurement Demu*测量模块得到。近似圆形磁链控制是通过适当的选择开关切换频率和施加于电机端的输入电压,使定子磁链的运动轨迹纳入一定的围来实现的。在定子磁链旋转过程中,有效电压
14、矢量的施加由磁链偏差的大小和磁链的具体方向来确定。整个仿真系统主要由定子磁链 (cilianhuanjie)模块、转矩滞环调节模块、磁链滞环调节模块、逆变器等组成。图3.2 近似圆形磁链控制系统仿真总图3.2.1 定子磁链模块 定子磁链的计算采用模型简单,计算量少,参数容易确定的模型。该模型可由式(5)(7)表示。图3.3所示为定子磁链模块。3.2.2 磁链与转矩滞环调节模块 磁链允许容差通过定义施密特触发器的上下触发点来设置,输出sf (0或1)即磁链滞环调节器的输出状态量。图4所示为定子磁链滞环调节模块。如图5所示为转矩滞环调节子系统,其中Wr、Wr*分别为观测所得转速和给定转速参考值,将
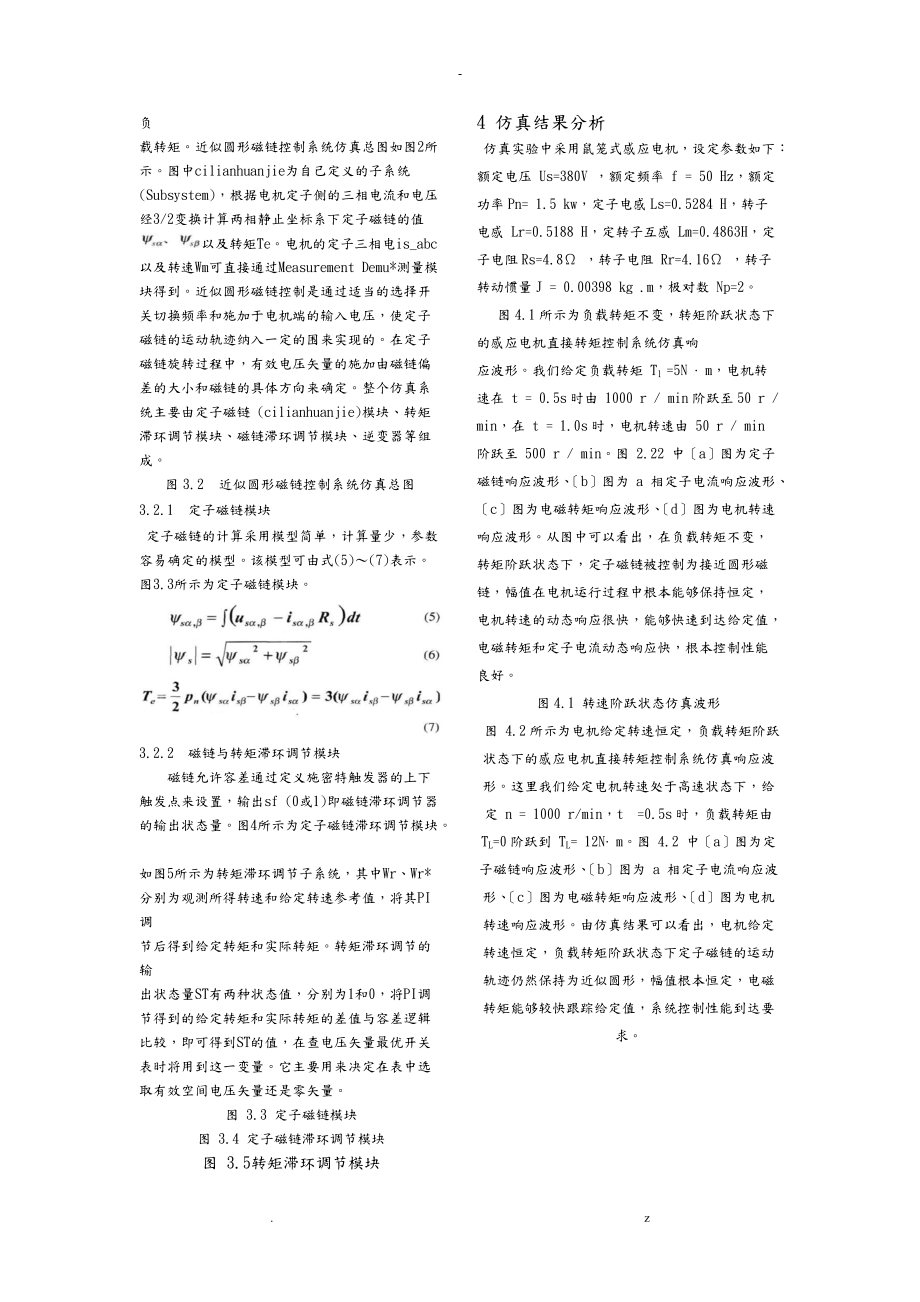
15、其PI调节后得到给定转矩和实际转矩。转矩滞环调节的输出状态量ST有两种状态值,分别为1和0,将PI调节得到的给定转矩和实际转矩的差值与容差逻辑比较,即可得到ST的值,在查电压矢量最优开关表时将用到这一变量。它主要用来决定在表中选取有效空间电压矢量还是零矢量。图 3.3 定子磁链模块图 3.4 定子磁链滞环调节模块图 3.5转矩滞环调节模块4 仿真结果分析 仿真实验中采用鼠笼式感应电机,设定参数如下:额定电压 Us=380V ,额定频率 f = 50 Hz,额定功率Pn= 1.5 kw,定子电感Ls=0.5284 H,转子电感 Lr=0.5188 H,定转子互感 Lm=0.4863H,定子电阻R
16、s=4.8 ,转子电阻 Rr=4.16 ,转子转动惯量J = 0.00398 kg .m,极对数 Np=2。 图4.1所示为负载转矩不变,转矩阶跃状态下的感应电机直接转矩控制系统仿真响应波形。我们给定负载转矩 Tl =5N m,电机转速在 t = 0.5s时由 1000 r / min阶跃至50 r / min,在 t = 1.0s时,电机转速由 50 r / min阶跃至 500 r / min。图 2.22 中a图为定子磁链响应波形、b图为 a 相定子电流响应波形、c图为电磁转矩响应波形、d图为电机转速响应波形。从图中可以看出,在负载转矩不变,转矩阶跃状态下,定子磁链被控制为接近圆形磁链,
17、幅值在电机运行过程中根本能够保持恒定,电机转速的动态响应很快,能够快速到达给定值,电磁转矩和定子电流动态响应快,根本控制性能良好。图4.1 转速阶跃状态仿真波形 图 4.2所示为电机给定转速恒定,负载转矩阶跃状态下的感应电机直接转矩控制系统仿真响应波形。这里我们给定电机转速处于高速状态下,给定 n = 1000 r/min,t =0.5s时,负载转矩由 TL=0阶跃到 TL= 12N m。图 4.2 中a图为定子磁链响应波形、b图为 a 相定子电流响应波形、c图为电磁转矩响应波形、d图为电机转速响应波形。由仿真结果可以看出,电机给定转速恒定,负载转矩阶跃状态下定子磁链的运动轨迹仍然保持为近似圆
18、形,幅值根本恒定,电磁转矩能够较快跟踪给定值,系统控制性能到达要求。图4.2 转矩阶跃状态仿真波形上面仿真实验中给定转速属于高速围,而直接转矩控制系统的低速性能是研究热点,图4.3所示为电机给定转速处于低速恒定,负载转矩阶跃状态下的感应电机直接转矩控制系统仿真响应波形。电机转矩给定为低速状态 100r/min 情况下,负载转矩依然在 0.5s 时由0N m阶跃至12N m。图 2.24 中a图为定子磁链响应波形、b为 a相定子电流响应波形、c图为电磁转矩响应波形、d图为电机转速响应波形。图 4.3低速下转矩阶跃仿真波形仿真实验说明,直接转矩控制系统具有构造简单、转矩响应快、鲁棒性强等优点。在给
19、定了不同负载的情况下表现出了良好的稳定性。但是低速状态下性能不佳,定子磁链的控制不尽人意,定子电流存在畸变,电磁转矩脉动较大,需要进一步加以改善。5 小结 本文应用MATLAB软件对DTC系统进展建模,从仿真结果可以看出,DTC控制策略的正确性仿真结果说明,系统具有很好的鲁棒性和快速性,这种控制技术可以实现感应电机产生转矩使感应电机获得与他励直流电机致的瞬态响应特性,实现对负载扰动和参考值变化的快速响应。本文建立的模型为进一步研究变频凋速系统提供了根底模型其使用的灵活性,操作的简单性以及仿真的准确性为进展异步电机DTC控制系统的数字化打下良好的根底。. z-参考文献:1 艾文乐, Kamper Maarten J.,王玉梅.六相交流感应电机新颖控制策略研究M.:中国电力,2021:1-2.2 宝昌,任永德. 电机的 DSP 控
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 花木种植协议合同
- 合同电子签名协议
- 消控室委托管理协议合同
- 合同带签协议
- 甲醇运输合同协议书
- 租房合同协议解除协议
- 小型写字楼租赁合同协议
- 外销取消合同协议
- 劳动合同转移协议书
- 酒店垄断合同协议
- 色谱、质谱、联用
- 独生子女父母退休一次性奖励审批1
- 铝合金窗陕西银杉节能门窗有限责任公司铝合金制作及安装工艺流程图
- 苏教版小学数学四年级下册《图形旋转》练习题
- 烧结普通砖、多孔砖回弹计算
- 2022年度英语希望之星风采大赛即兴问答题库小学组
- 结构化面试技巧(完整版).ppt
- 视网膜动静脉直径测量方法
- 抗病毒药物在猪病临床生产中的应用
- 抗高血压药物临床试验技术指导原则(第二稿)
- 基于PLC的智能温室控制系统设计
评论
0/150
提交评论