



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、第第2章章 平面机构及其自由度平面机构及其自由度第三节第三节 平面机构的自由度平面机构的自由度第二节第二节 平面机构及其运动简图平面机构及其运动简图第一节第一节 机构的组成机构的组成 本章小结本章小结机械设计基础第第2章章 平面机构及其自由度平面机构及其自由度 平面机构:平面机构: 所有构件都在同一平面或相互平行的平所有构件都在同一平面或相互平行的平面内运动的机构。面内运动的机构。 机构中的构件只有通机构中的构件只有通过一定的方式相互联接起过一定的方式相互联接起来,并且满足一定的条件来,并且满足一定的条件才能传递确定的运动和动才能传递确定的运动和动力。力。零件零件 一、一、 构件和零件构件和零
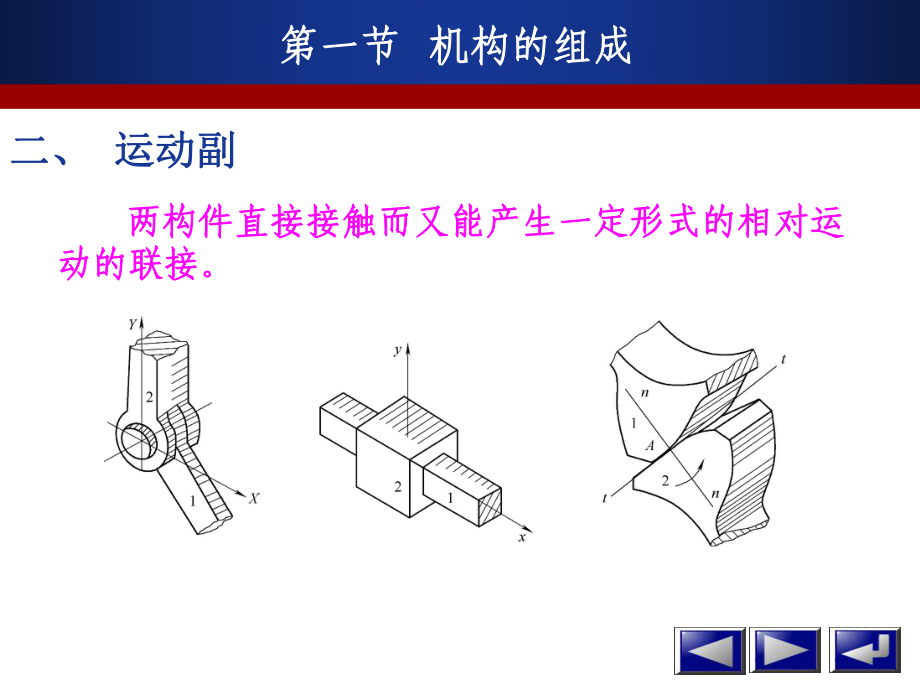
2、件 组成机器的不可拆卸的基本单元,它是机器中最小的组成机器的不可拆卸的基本单元,它是机器中最小的独立独立制造制造单元单元构件构件 机器和机构中独立机器和机构中独立运动运动的单元体。的单元体。可以是单独的零件,也可以由多个零件刚性联接组成可以是单独的零件,也可以由多个零件刚性联接组成第一节第一节 机构的组成机构的组成第一节第一节 机构的组成机构的组成二、二、 运动副运动副 两构件直接接触而又能产生一定形式的相对运两构件直接接触而又能产生一定形式的相对运动的联接。动的联接。第一节第一节 机构的组成机构的组成 运动副分类运动副分类平面运动副和空间运动副平面运动副和空间运动副(根据两构件之间的相对运动
3、分类(根据两构件之间的相对运动分类 )高副和低副高副和低副(根据两构件之间的接触情况分类)(根据两构件之间的接触情况分类) l高副:高副: 两构件通过点或线的接触而构两构件通过点或线的接触而构成的运动副。成的运动副。高副动画演示2.1 机构的组成机构的组成 运动副分类运动副分类u转动副转动副(也称为铰链也称为铰链): 两构件之间的相对运动为转动的低副两构件之间的相对运动为转动的低副u移动副:移动副: 两构件之间的相对运动为移动的低副两构件之间的相对运动为移动的低副l低副:低副:两构件通过面接触而构成的运动副。两构件通过面接触而构成的运动副。转动副动画演示移动副动画演示第二节第二节 平面机构及其
4、运动简图平面机构及其运动简图一、一、 平面机构的组成平面机构的组成机架:机架:与参考系固结相对不动的构件。与参考系固结相对不动的构件。例如各种机床的床身是机架。在机构简图中,例如各种机床的床身是机架。在机构简图中,将机架打上斜线表示。除其余的构件均相对将机架打上斜线表示。除其余的构件均相对于机架而运动。于机架而运动。原动件:原动件:给定独立运动参数的构件。即直接接受能源或最给定独立运动参数的构件。即直接接受能源或最先接受能源作用有驱动力或力矩的构件。先接受能源作用有驱动力或力矩的构件。例如柴油机中的活塞。它例如柴油机中的活塞。它的运动是外界输入的,因此又称为输入构件。在机构简图中,将原动件标的
5、运动是外界输入的,因此又称为输入构件。在机构简图中,将原动件标上箭头表示。上箭头表示。从动件:从动件:原动件带动而随之运动的构件。原动件带动而随之运动的构件。如柴油机中的连杆、如柴油机中的连杆、曲轴、齿轮等都是从动件。当从动件输出运动或实现机构的功能时,便称曲轴、齿轮等都是从动件。当从动件输出运动或实现机构的功能时,便称其为执行构件件。其为执行构件件。第二节第二节 平面机构及其运动简图平面机构及其运动简图二、二、 平面机构运动简图及其意义平面机构运动简图及其意义定义:定义: 用简单线条和规定的符号表示构件用简单线条和规定的符号表示构件和运动副,并按照一定的比例尺确定和运动副,并按照一定的比例尺
6、确定运动副的相对位置及与运动有关的尺运动副的相对位置及与运动有关的尺寸,这种表明机构的组成和各构件间寸,这种表明机构的组成和各构件间真实运动关系的简单图形,称为机构真实运动关系的简单图形,称为机构的运动简图。的运动简图。意义:意义:设计新机构,研究已有机构设计新机构,研究已有机构第二节第二节 平面机构及其运动简图平面机构及其运动简图三、三、 运动副和构件的表示运动副和构件的表示 1.移动副的表示移动副的表示第二节第二节 平面机构及其运动简图平面机构及其运动简图2. 转动副的表示转动副的表示第二节第二节 平面机构及其运动简图平面机构及其运动简图3. 高副的表示高副的表示(画出接触处的曲线轮廓)(
7、画出接触处的曲线轮廓)第二节第二节 平面机构及其运动简图平面机构及其运动简图1.与机构中构件与机构中构件的外形,截面尺的外形,截面尺寸、组成构件的寸、组成构件的零件数目、运动零件数目、运动副的具体构造无副的具体构造无关;关;2.与机构中运动与机构中运动副的性质(低副、副的性质(低副、高副)、运动副高副)、运动副的数目及相对位的数目及相对位置、构件的数目置、构件的数目有关。有关。注意注意四、四、 绘制平面机构运动简图的方法和步骤绘制平面机构运动简图的方法和步骤第二节第二节 平面机构及其运动简图平面机构及其运动简图1分析机构的实际分析机构的实际构造和运动情况,构造和运动情况,找出机架、原动找出机架
8、、原动件和从动件件和从动件 ;2从主动件开始顺从主动件开始顺着传动路线,分着传动路线,分析各构件间的相析各构件间的相对运动情况,确对运动情况,确定活动构件的数定活动构件的数目、运动副的类目、运动副的类型和数目型和数目 ;3选择适当的视图选择适当的视图平面和适当的机平面和适当的机构运动瞬时位置,构运动瞬时位置,确定适当的比例确定适当的比例尺,绘制机构运尺,绘制机构运动简图。动简图。步骤步骤第二节第二节 平面机构及其运动简图平面机构及其运动简图v选择比例,绘制机构运动简图选择比例,绘制机构运动简图)或(构件的图示长度构件的实际长度mm/mmm/mml第二节第二节 平面机构及其运动简图平面机构及其运
9、动简图机构运动简图常用符号机构运动简图常用符号第二节第二节 平面机构及其运动简图平面机构及其运动简图 如图所示为一颚式破碎机。当偏心轴如图所示为一颚式破碎机。当偏心轴2 2绕轴心绕轴心A A连续回转连续回转时,动颚板时,动颚板3 3作往复摆动,从而将矿石轧碎。试绘制此破碎作往复摆动,从而将矿石轧碎。试绘制此破碎机的机构运动简图。机的机构运动简图。 颚式破碎机动画演示第三节第三节 平面机构的自由度平面机构的自由度一、一、 构件的自由度和约束构件的自由度和约束自由度:自由度:构件作独立运动的数目。构件作独立运动的数目。一个作平面运动的自由构件自由一个作平面运动的自由构件自由度总数为度总数为3 3。
10、若一个平面机构共有若一个平面机构共有n n个活动构件。在未用运动副联接前,个活动构件。在未用运动副联接前,则活动构件自由度总数为则活动构件自由度总数为3n3n。第三节第三节 平面机构的自由度平面机构的自由度 通常,通常,一个低副引入一个低副引入2个约束;一个高副引入个约束;一个高副引入1个约束。个约束。 当用运动副将这些活动构件与机架联接组成机当用运动副将这些活动构件与机架联接组成机构后,则各活动构件具有的自由度受到构后,则各活动构件具有的自由度受到约束约束。一、一、 构件的自由度和约束构件的自由度和约束约束:约束:第三节第三节 平面机构的自由度平面机构的自由度 一个低副引入一个低副引入2 2
11、个约束(失去个约束(失去2 2个自由度)仅保个自由度)仅保留留1 1个自由度个自由度转动副:转动副: 组成转动副的两组成转动副的两构件只能在一个平面内相构件只能在一个平面内相对转动。对转动。移动副:组成运动副移动副:组成运动副的两构件只能沿某一的两构件只能沿某一轴线相对移动。轴线相对移动。一、一、 构件的自由度和约束构件的自由度和约束第三节第三节 平面机构的自由度平面机构的自由度 一个高副引入一个高副引入1 1个约束(失去个约束(失去1 1个自由度)保留个自由度)保留2 2个自由度个自由度第三节第三节 平面机构的自由度平面机构的自由度此条件讨论了机构自由度数与原动件的关系此条件讨论了机构自由度
12、数与原动件的关系1.原动件数目原动件数目WF,运动不确定运动不确定 如:五杆机构二、二、 机构具有确定运动的条件机构具有确定运动的条件第三节第三节 平面机构的自由度平面机构的自由度v2.F0,机构不能运动成机构不能运动成为刚性桁架为刚性桁架 v 如三杆机构 v 又如图所示:F=3 n- 2 PL PH =3325=-1F0机构不能运动成为机构不能运动成为超静定桁架超静定桁架第三节第三节 平面机构的自由度平面机构的自由度3.W=F (F0) 机构具有确定的相对运动机构具有确定的相对运动第三节第三节 平面机构的自由度平面机构的自由度4.W F 机构按受力较大的原动件的运动规律运动机构按受力较大的原
13、动件的运动规律运动 或在弱处损坏或在弱处损坏机构具有确定相对运动的条件机构具有确定相对运动的条件:机构原动件数应等于机构自由度数机构原动件数应等于机构自由度数,即即W=F第三节第三节 平面机构的自由度平面机构的自由度惯性筛惯性筛F=3n-2PL-PH =35-26=3三、三、 计算机构自由度时应注意的问题计算机构自由度时应注意的问题v 1.复合铰链复合铰链v 两个以上的构件同时用转动副在同一轴线上构成的连接。两个以上的构件同时用转动副在同一轴线上构成的连接。第三节第三节 平面机构的自由度平面机构的自由度三、三、 计算机构自由度时应注意的问题计算机构自由度时应注意的问题v 1.复合铰链复合铰链v
14、 两个以上的构件同时用转动副在同一轴线上构成的连接。两个以上的构件同时用转动副在同一轴线上构成的连接。由由K个构件组成的复合铰链应含有个构件组成的复合铰链应含有(K-1)个转动副。个转动副。例例1 如图为一惯性筛的机构简图,试计算其如图为一惯性筛的机构简图,试计算其 机构的自由度。机构的自由度。解:解:该机构中,该机构中,n5,PL=7(C处为复合铰链处为复合铰链),PH=0 ,所以该机构的自所以该机构的自由度:由度: F=3n-2PL-PH =35-27=1第三节第三节 平面机构的自由度平面机构的自由度第三节第三节 平面机构的自由度平面机构的自由度例例2 计算原盘锯主体机构的自由度计算原盘锯
15、主体机构的自由度解解 机构中活动构件有机构中活动构件有n 7低副有低副有PL12345678110F = 3nF = 3n2P2PL LP PH H = = 3 3 2 2= =7 710101 12.局部自由度局部自由度 机构中不影响其输出与输入运动关系的个别构件独立机构中不影响其输出与输入运动关系的个别构件独立运动的自由度,称为机构的运动的自由度,称为机构的局部自由度局部自由度. F=3n-2 PL-PH=32-22-1=1第三节第三节 平面机构的自由度平面机构的自由度F=3n-2 PL-PH=33-23-1=2在计算机构自由度时,应预先排除。在计算机构自由度时,应预先排除。3.虚约束(重
16、复约束、消极约束)虚约束(重复约束、消极约束) 在机构中与其他约束在机构中与其他约束重复而不起限制运动作用重复而不起限制运动作用的约束称为的约束称为虚约束虚约束。 在计算机构自由度时,在计算机构自由度时,应当除去不计。应当除去不计。机构中机构中n=3,PL=4, PH=0,则机构自由度为:则机构自由度为:F=3n-2PL-PH =33-24-0=1第三节第三节 平面机构的自由度平面机构的自由度 在计算机构自由度时应在计算机构自由度时应除去除去CD构件和转动副构件和转动副C,D平面机构的虚约束常出现在下述场合平面机构的虚约束常出现在下述场合(1)(1)两构件上两点间的距离保持恒定不变两构件上两点
17、间的距离保持恒定不变第三节第三节 平面机构的自由度平面机构的自由度平面机构的虚约束常出现在下述场合平面机构的虚约束常出现在下述场合(2) 两构件同时在多处两构件同时在多处构成转动副,且各转构成转动副,且各转动副轴线重合,此时动副轴线重合,此时只有一个转动副起作只有一个转动副起作用,其余为虚约束。用,其余为虚约束。第三节第三节 平面机构的自由度平面机构的自由度(3)两个构件组成多个移两个构件组成多个移动副,其导路互相平动副,其导路互相平行时,只有一个移动行时,只有一个移动副起约束作用,其余副起约束作用,其余部是虚约束。部是虚约束。第三节第三节 平面机构的自由度平面机构的自由度平面机构的虚约束常出
18、现在下述场合平面机构的虚约束常出现在下述场合(4)机构中对传递运动不起独立作用的对称部分机构中对传递运动不起独立作用的对称部分 虚约束虽然对机构的运动不起独立的约束作用,但它可虚约束虽然对机构的运动不起独立的约束作用,但它可以改善机构的受力情况、增加构件的刚性。以改善机构的受力情况、增加构件的刚性。第三节第三节 平面机构的自由度平面机构的自由度平面机构的虚约束常出现在下述场合平面机构的虚约束常出现在下述场合课堂练习课堂练习1 计算图示机构的自由度计算图示机构的自由度(若有复合铰链、局部自由度若有复合铰链、局部自由度及虚约束必须明确指出)及虚约束必须明确指出)并说明该机构是否具有确定的相并说明该机构是否具有确定的相对运动。对运动。练习1.惯性筛本章小结本章小结v 本章主要介绍了平面运动副的类型、平本章主要介绍了平面运动副的类型、平面机构运动简图的绘制、平面机构
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 如何构建企业员工归属感与忠诚度试题及答案
- 2024-2025学年云南省宣威五中高三考前热身物理试卷含解析
- 心理咨询师行为干预与考试理论试题及答案
- 2025年公共营养师课程设置试题及答案
- 2025-2030中国电商物流行业市场发展现状及发展趋势与投资风险研究报告
- 2025-2030中国电动工具行业市场发展分析及前景趋势与投资机会研究报告
- 贵州省黔西南州兴仁市凤凰中学2024-2025学年高三物理试题二模冲刺试题(八)
- 大专生毕业试题及答案
- 2025-2030中国生物芯片产品行业市场发展趋势与前景展望战略研究报告
- 2025-2030中国生物基聚四氢呋喃THF1000行业市场发展趋势与前景展望战略分析研究报告
- 新时代社区治理存在的问题及对策研究-以XX社区为例
- 《针灸神奇作用》课件
- 美国医疗的社会变迁
- 2023全新混凝土罐车运输安全协议
- 市政工程消耗量定额 zya1-31-2015
- 汽车托管租赁合同
- 国家开放大学《土木工程力学(本)》形考作业1-5参考答案
- 改进小学数学课堂教学
- (完整版)光电子学第2章-介质波导与光纤
- 公路工程安全生产检查记录表
- 2022年贵阳市贵安新区招聘幼儿园雇员教师考试真题
评论
0/150
提交评论