



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、自动控制课程设计一、设计要求:对以下5马力他励直流电动机进行转速单闭环控制。转速闭环控制器的输入为转速偏差,输出为施加于电机上的电枢电压。指令转速设定为200 rad/s (1911 rpm)。1. 建立直流电机以电枢电压为输入、角转速为输出的传递函数,用MATLAB*软件编制m程序进行Bode图辅助设计,选择合适的控制器结构及参数,使系统满足以下基本要求:1)系统对阶跃型转速指令无静差;2)开环系统增益穿越频率为1015rad/s(此值影响电机启动电流);3)相角裕度>60°。2. 用Simulink搭建mdl仿真模型(采用分解模型,否则无法观察电枢电流)对设计结果进行验证、
2、完善,使最终设计结果进一步满足下述要求:1)空载启动,转速爬升到指令值90%的时间<0.5s;2)空载启动电流(以过渡过程中的最大值计)不超过额定电压下直接启动时的数值。3. 在电机空载稳定运行中突加阶跃型额定负载转矩,观察转速跌落情况并与无闭环控制的电机做对比,分析、体会闭环控制在抗扰性方面的优势。电机参数如示:额定电压:240 V 电枢电感L:0.028 H额定电流:19.7 A 转矩常数Kt:1.03 N·m/A额定转速:183 rad/s (1750 rpm) 电势常数Kv:1.03 V·s/rad额定转矩:20.4 N·m 转动惯量J:0.0221
3、5 Kg·m2电枢电阻R:2.581 ohm 粘性摩擦系数c:0.002953 N·m·s二、原理推导三、设计过程1.利用MATLAB编程进行辅助设计,时系统满足前三个条件1)对原系统进行分析原系统的开环传递函数: 1661-s2 + 92.31 s + 1723绘制出原系统的波特图;分析:由图知穿越频率不满足要求,而且系统要求对阶跃响应无误差跟踪,则需要增加一个积分环节。则传函变为: 1661-s3 + 92.31 s2 + 1723 s对应波特图为:为满足条件穿越频率在1015HZ间,增加K以满足条件,增加K后穿越频率会向右移,但同时系统的相位裕度也会减小,为
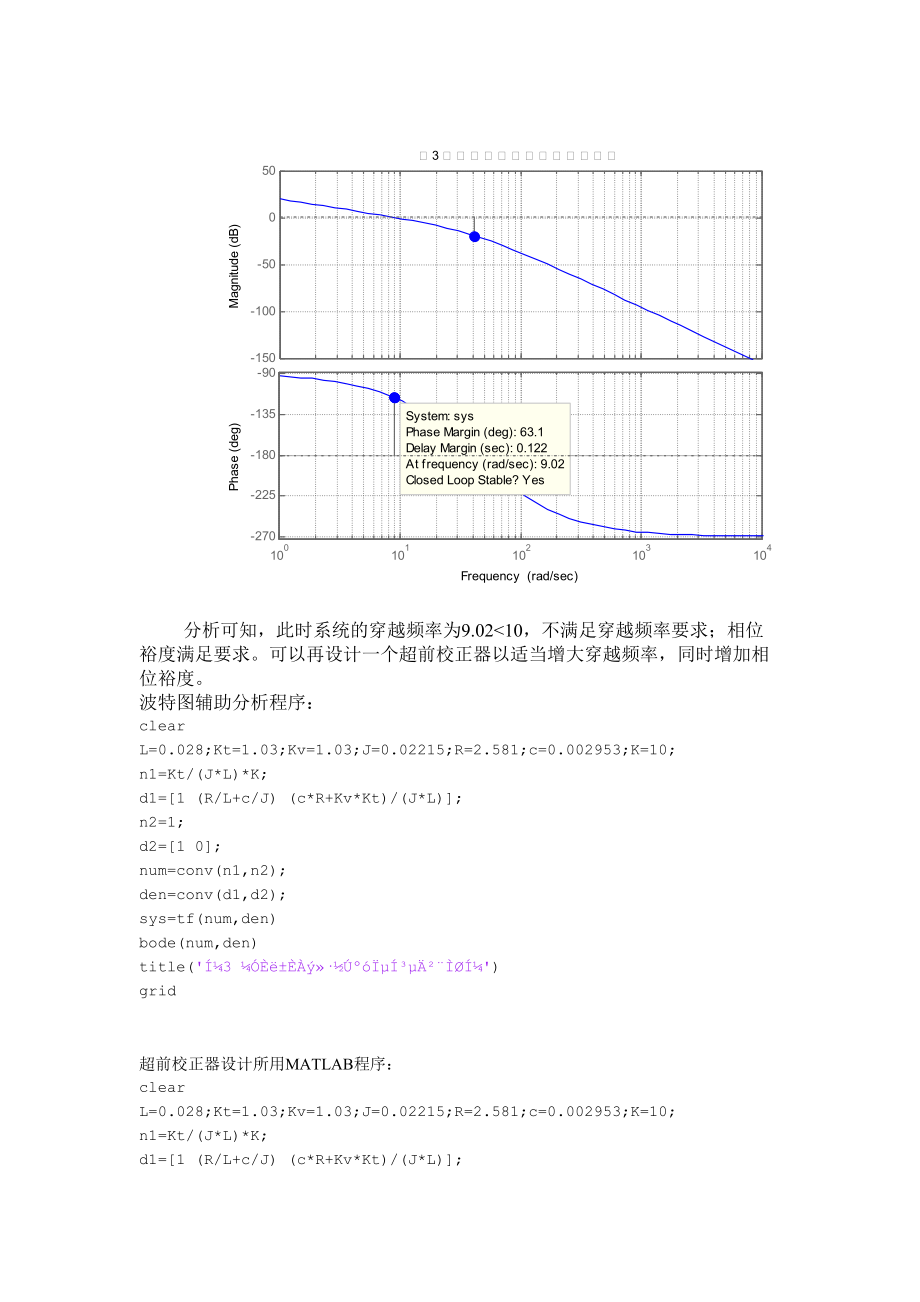
4、满足题目要求,需合理选择K值,经过比较试验,此处K取10,此时所得的开环传递函数为: 1.89e004-s3 + 92.31 s2 + 1723 s所得系统的波特图为:分析可知,此时系统的穿越频率为9.02<10,不满足穿越频率要求;相位裕度满足要求。可以再设计一个超前校正器以适当增大穿越频率,同时增加相位裕度。波特图辅助分析程序:clearL=0.028;Kt=1.03;Kv=1.03;J=0.02215;R=2.581;c=0.002953;K=10;n1=Kt/(J*L)*K;d1=1 (R/L+c/J) (c*R+Kv*Kt)/(J*L);n2=1;d2=1 0;num=conv
5、(n1,n2);den=conv(d1,d2);sys=tf(num,den)bode(num,den)title('ͼ3 ¼ÓÈë±ÈÀý»·½ÚºóϵͳµÄ²¨ÌØͼ')grid超前校正器设计所用MATLAB程序:clearL=0.028;Kt=1.03;Kv=1.03;J=0.02215;
6、R=2.581;c=0.002953;K=10;n1=Kt/(J*L)*K;d1=1 (R/L+c/J) (c*R+Kv*Kt)/(J*L);n2=1;d2=1 0;num=conv(n1,n2);den=conv(d1,d2);sys=tf(num,den)Pm0=63;gamad=65; % 设计相位裕度phai=gamad-Pm0+7;pha=phai*pi/180;alpha=(1+sin(pha)/(1-sin(pha);mag,phase,w=bode(sys);adb=20*log10(mag);am=-10*log10(alpha);wgc=spline(adb,w,am);%
7、插值T=1/(wgc*sqrt(alpha);alphat=alpha*T;Gc=tf(alphat 1,T 1)超前校正器函数: 0.113 s + 1-0.08246 s + 1系统的开环传函为 1877 s + 1.661e004-0.08246 s4 + 8.612 s3 + 234.4 s2 + 1723 s系统波特图为:系统的阶跃响应为:分析:由图5知:对阶跃响应无误差跟踪 由图4知:系统的穿越频率为10.4>10,相位裕度为68.4度>60度,满足题目要求。2.用Simulink搭建mdl仿真模型对设计结果进行验证、完善。加入矫正器后系统的结构框图:将具体参数带入有:
8、a)观察系统的响应时间 得到系统的阶跃响应图为:图6 用simulink仿真得到的系统阶跃图结果分析:由图可知,系统的响应时间约为0.2秒,小于设计要求的0.5秒,满足设计要求。b)观察比较冲击电流的大小以及电流响应过程:1)未加矫正器时直接在U=240V下启动电流电路结构:电流响应图:图7 无闭环控制时额定电压下直接启动时电流响应图分析:可以看出冲击电流较大,约为72A.2)加入矫正器后电路结构:电流响应图:图8 加入控制器后在200r/min指令下的电流响应图结果分析:由图7和图8对比可知,加入矫正器后,空载启动时的冲击电流约为35A,小于在240V电压下直接空载启动时的冲击电流值约72A
9、,满足设计要求。3.在电机空载稳定运行中突加阶跃型额定负载转矩,观察转速跌落情况并与无闭环控制的电机做对比,分析。a)有闭环控制时在2秒时突加阶跃型额定负载的转速的变化响应过程:电路结构:加入200r/min指令后得到转速变化图:图9 加入闭环控制稳定运行2秒后加入负载后转速变化图b)无闭环控制时在2秒时突加阶跃型额定负载的转速的变化响应过程:电路结构1:所得图形:图10 无闭环控制器稳定运行2秒后加入负载后转速变化图结果比较分析:无闭环控制时加入额定负载转矩时,转速下降约40r/min,自动调节能力差,抗干扰能力差。而加入闭环控制器后,稳定运行后加入干扰后,转速虽有短暂下降,但下降幅度较小,
10、且自动调节能力强,恢复到接近干扰前的转速水平,即加入闭环控制器后系统的抗干扰能力提高明显。四其他方案比较:此题目也可以不用超前校正器,由图3可以看出,此时相位裕度为63.1度,穿越频率为9.02HZ,通过适当增加K值,可以使穿越频率右移,虽然相位裕度有所下降,但此时仍可以保证大于60度。电路结构如示:此时系统的波特图为:用simulink得到的阶跃响应图为:图12 只计入比例和积分环节得到的阶跃响应图得到的电流响应为:图13 只计入比例和积分环节加入阶跃响应得到的电流响应图2秒时加入干扰信号得到准转速变化图图14 2秒时加入干扰信号得到准转速变化图对比分析:由图6和图12加入矫正环节后系统的阶
11、跃响应图可以看出,虽然两者的响应时间都接近0.2秒,但是未加超前校正环节时系统有超调量,但是加入矫正环节后系统的稳定时间会增加,但是没有出现超调,这是因为超前校正环节可以提高系统的相位裕度,从而减小超调。同时对比图9和图14可以看出,未加入超前校正器的系统对指定转速仍有超调,而在比例和积分环节上载加上超前校正环节后系统对指定指令没有超调,设计更优。结论:通过对比,仍选择矫正器环节为比例环节加上积分环节再加上超前校正器共同构成,即为标题三设计过程中所得到的校正器。即其电路结构仍为:五心得体会与总结本次课程设计考察了较多基本概念及对书本的理解,比如如何实现对信号的无误差跟踪以及对闭环控制等对系统响
12、应的影响等。开始设计的时候由于对题意理解没有到位而采用惯性思维直接将控制器加在了输入电压后面,导致整个设计失败,后来即使调整,认真将题目要求理解透彻的基础上整理了设计思路,然后开始具体实施,避免了整个方向出错。同时本次设计也考察了波特图的很多知识,比如K对穿越频率的影响,相位裕度与超调量的关系等,通过此次实验也加深了对波特图的理解,复习了课本上的相关知识,同时更加熟练了MATLAB编程方式,在设计过程中叶更加注重规范,字体图标相对以前也有了一些进步,也会多用多一些对比的方式,而不再单一的完成设计任务,所获得的提高也更大一些。总体来说,此次课程设计收获较大,通过自己翻阅资料然后完成设计能较大的提高自己的能力,希望以后能多做这样的课程设计,也会在完成过程中更加规范,
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 老年人阅读适配方案优化
- (二模)2025年深圳市高三年级第二次调研考试物理试卷(含标准答案)
- 医院区角活动设计方案
- 活动流程策划方案
- 联想公司合作协议模板
- 食品行业开工第一课安全培训
- 提升社区居民参与感的方式计划
- 品牌官网的优化与建设计划
- 强化专业技能培训的工作计划
- 教师评价机制优化与创新计划
- 中职世界历史试题及答案
- 糖尿病护理查房提出问题
- T-ZMDS 10019-2024 经颅电刺激仪基本技术规范
- 人教版六年级下册科学全册教案
- 2024福建中闽能源股份有限公司招聘12人笔试参考题库附带答案详解
- 2025年江西省旅游集团股份有限公司招聘笔试参考题库含答案解析
- 《外科补液原则》课件
- 《墨家思想》课件
- 浙江省2025年1月首考高考英语试卷试题真题(含答案)
- 川教版(2024)小学信息技术三年级上册《跨学科主题活动-在线健康小达人》教学实录
- 机械专业英语
评论
0/150
提交评论