



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
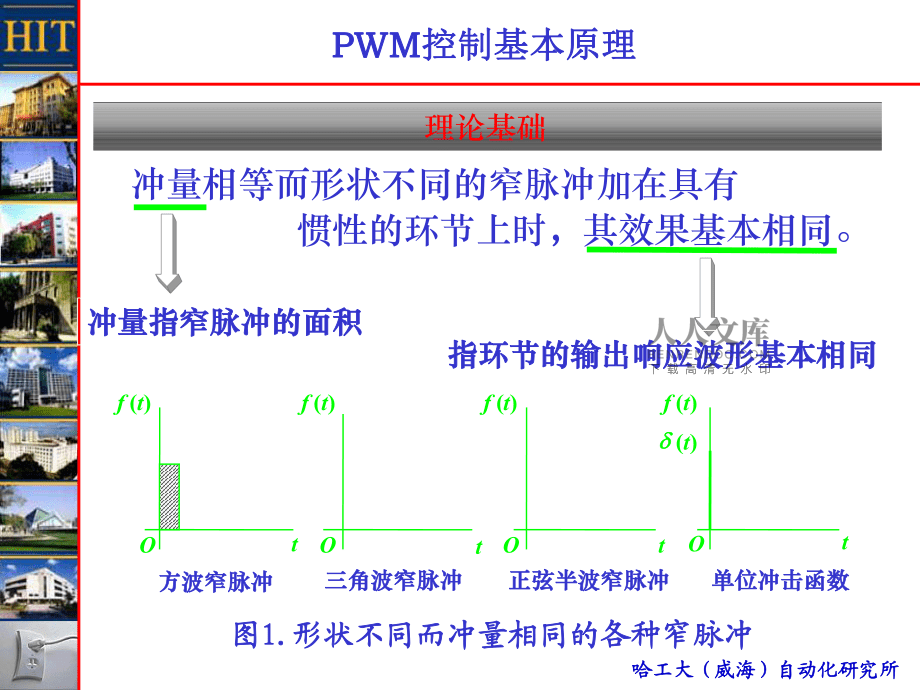
1、哈工大(威海)自动化研究所哈工大(威海)自动化研究所n PWM PWM (Pulse Width Modulation)(Pulse Width Modulation)n 脉宽调制技术:通过对一系列脉冲的宽度进行脉宽调制技术:通过对一系列脉冲的宽度进行调制,来等效获得所需波形(含形状和幅值)。调制,来等效获得所需波形(含形状和幅值)。第第4 4章章 PWMPWM控制与整流技术控制与整流技术哈工大(威海)自动化研究所哈工大(威海)自动化研究所PWMPWM控制基本原理控制基本原理方波窄脉冲方波窄脉冲三角波窄脉冲三角波窄脉冲单位冲击函数单位冲击函数正弦半波窄脉冲正弦半波窄脉冲f (t)d d (t)
2、tOa)a)b)b)c)c)d)d)tOtOtOf (t)f (t)f (t)图图1.1.形状不同而冲量相同的各种窄脉冲形状不同而冲量相同的各种窄脉冲冲量指窄脉冲的面积冲量指窄脉冲的面积指环节的输出响应波形基本相同指环节的输出响应波形基本相同理论基础冲量相等而形状不同的窄脉冲加在具有 惯性的环节上时,其效果基本相同。哈工大(威海)自动化研究所哈工大(威海)自动化研究所 如何用一系列等幅不等宽的脉冲来代替一个如何用一系列等幅不等宽的脉冲来代替一个正弦半波正弦半波Ou tOuttPWMPWM控制基本原理控制基本原理Outt哈工大(威海)自动化研究所哈工大(威海)自动化研究所Ou t 如何用一系列等
3、幅不等宽的脉冲来代替一个如何用一系列等幅不等宽的脉冲来代替一个正弦半波正弦半波SPWMSPWM波波要改变等效输出正弦波幅值,按要改变等效输出正弦波幅值,按同一比例改变各脉冲宽度即可。同一比例改变各脉冲宽度即可。图图2.2.等幅不等宽脉冲等效波形等幅不等宽脉冲等效波形PWMPWM控制基本原理控制基本原理OuttOutt哈工大(威海)自动化研究所哈工大(威海)自动化研究所对于正弦波的负半周,采取同样的方法,得到PWM波形,因此正弦波一个完整周期的等效PWM波为:根据面积等效原理,正弦波还可等效为下图中的PWM波,该方式应用广泛。Ow wtUd-UdOw wtUd-Ud图图3.3.单极性单极性图图4
4、.4.双极性双极性PWMPWM控制基本原理控制基本原理哈工大(威海)自动化研究所哈工大(威海)自动化研究所PWMPWM控制基本原理控制基本原理输入电源是恒定直流输入电源是恒定直流输入电源是交流或输入电源是交流或不是恒定的直流不是恒定的直流直流斩波电路直流斩波电路PWMPWM逆变电路逆变电路PWMPWM整流电路整流电路斩控式交流调压电路斩控式交流调压电路矩阵式变频电路矩阵式变频电路图图5. 5. 基于面积等效原理进行控制,本质相同基于面积等效原理进行控制,本质相同UdOwtUd-uot哈工大(威海)自动化研究所哈工大(威海)自动化研究所 电流型逆变电路进行PWM控制,得到PWM电流波。PWMPW
5、M控制的基本原理控制的基本原理直流斩波电路直流斩波电路直流波形直流波形SPWMSPWM波波正弦波形正弦波形基于基于“面积等效原理面积等效原理” ” 等效成其他所需波形,如等效成其他所需波形,如: :l 所需波形l 等效的PWM波0s5m s10m s15m s20m s25m s30m s-20V0V20V图图6.6.面积等效原理波形面积等效原理波形哈工大(威海)自动化研究所哈工大(威海)自动化研究所 双极性双极性PWM控制方式(三相桥逆变)控制方式(三相桥逆变) 图图7. 7. 三相桥式三相桥式PWMPWM型逆变电路型逆变电路 三相PWM控制公用三角波载波uc 三相调制信号urU、urV和u
6、rW依次相差120PWMPWM控制的基本原理控制的基本原理哈工大(威海)自动化研究所哈工大(威海)自动化研究所下面以下面以U U相为例进行分析:相为例进行分析:PWMPWM控制的基本原理控制的基本原理 图图8. 8. 三相桥式三相桥式PWMPWM逆变电路波形逆变电路波形 哈工大(威海)自动化研究所哈工大(威海)自动化研究所1 1、当、当u urUrU u uc c时,给时,给V V1 1导通信号,导通信号,V V4 4关断信号,关断信号,u uUNUN= =U Ud d/2/2;2 2、当当u urUrU 0,随着电容C1两端电压的升高,电源电流is下降,电路工作在模式1; 此时开通V2,由于
7、(Us+EDC-)的共同作用,电流is增加,电路工作在模式2。如果V2关断,由于电感Ls的作用。当电流有减小趋势时,电感电势反向,使电源电压Us与电感电势的叠加值EDC+,即Us+Lsdis/dtEDC+,二极管D1续流导通,对C1继续充电。电路又回到模式1,此时,UAN=EDC-=-EDC/2。2 2单相半桥单相半桥PWMPWM整流电路分析整流电路分析模式模式2USULANC1C2RLIS+EDCEDC +EDC +IDC模式模式1USULISANC1C2IDCEDC +EDCEDC -+RL哈工大(威海)自动化研究所哈工大(威海)自动化研究所3. 单相全桥PWM整流电路工作原理PWMPWM
8、整流电路工作原理整流电路工作原理当正弦波和电源频率相同时,当正弦波和电源频率相同时,i is s为同电源频率正弦波;为同电源频率正弦波;由于由于L Ls s的滤波作用,谐波电压只使的滤波作用,谐波电压只使i is s产生很小的脉动。产生很小的脉动。 图图10.10.单相全桥单相全桥PWMPWM整流电路整流电路负负载载usLsisRsV1V2V4V3AB+udVD 1VD 3VD 4VD 2哈工大(威海)自动化研究所哈工大(威海)自动化研究所正弦波和三角波比较,对图正弦波和三角波比较,对图1010中中V V1 1-V-V4 4进行进行SPWMSPWM控制,可控制,可 在交流输入端在交流输入端AB
9、AB产生一个产生一个SPWMSPWM波波u uABAB。u uABAB中含有和正弦波同频率且幅值成比例的基波分量,以中含有和正弦波同频率且幅值成比例的基波分量,以 及和三角波载波有关的高次谐波,不含有低次谐波;及和三角波载波有关的高次谐波,不含有低次谐波;u us s一定,一定,i is s幅值和相位由基波幅值和相位由基波u uABfABf幅值及幅值及u us s相位差决定;相位差决定;改变改变u uABfABf幅值和相位,可使幅值和相位,可使i is s和和u us s同相或反相,同相或反相,i is s比比u us s超超 前前9090,或使,或使i is s与与u us s相位差为所需角
10、度;相位差为所需角度;PWMPWM整流电路工作原理整流电路工作原理哈工大(威海)自动化研究所哈工大(威海)自动化研究所4.4.对单相全桥对单相全桥PWMPWM整流电路工作原理的进一步说明整流电路工作原理的进一步说明n 整流状态下,整流状态下,us 0时时: : V V2 2、VDVD4 4、VDVD1 1、L Ls s和和V V3 3、VDVD1 1、VDVD4 4、L Ls s分别组成两个升压分别组成两个升压 斩波电路,以(斩波电路,以(V V2 2、VDVD4 4、VDVD1 1、L Ls s)为例;为例; V V2 2通时,通时,u us s通过通过V V2 2、VDVD4 4向向L L
11、s s储能;储能; V V2 2关断时,关断时,L Ls s中的储能通过中的储能通过VDVD1 1、VDVD4 4向向C C充电;充电; V V1 1、VDVD3 3、VDVD2 2、L Ls s和和V V4 4、VDVD2 2、VDVD3 3、L Ls s分别组成两个升压分别组成两个升压 斩波电路,分析同上。斩波电路,分析同上。PWMPWM整流电路工作原理整流电路工作原理n 整流状态下,整流状态下,u us0s0时时: :哈工大(威海)自动化研究所哈工大(威海)自动化研究所5 5三相桥式三相桥式PWM整流电路整流电路图图11.11.三相桥式三相桥式PWMPWM整流电路整流电路 三相桥式PWM
12、整流电路,应用最广。PWM整流电路工作原理整流电路工作原理 进行SPWM控制,在交流输入端可得SPWM电压,ia、 ib、 ic为正弦波且和电压同相,功率因数近似为1。负载CuaLsiaRsV1V2V4V3ABVD3VD1VD2VD4+udCV5VD5V6VD6ubibucic哈工大(威海)自动化研究所哈工大(威海)自动化研究所 6 6间接电流控制间接电流控制 间接电流控制系统如图间接电流控制系统如图1212所示,间接电流控制又称相位和幅值控制;所示,间接电流控制又称相位和幅值控制; 按相量关系来控制整流桥输入电压,使输入电流和电压同相位,得按相量关系来控制整流桥输入电压,使输入电流和电压同相
13、位,得 到功率因数为到功率因数为1 1的控制效果。的控制效果。PWMPWM整流电路工作原理整流电路工作原理 图图12.12.间接电流控制系统结构间接电流控制系统结构PI+-负载三角波sin(wt+2kp/3)(k=0,1,2)cos(wt+2kp/3)(k=0,1,2)u*dud+-+-+iduRuLXLRuA,B,CudRLua,ub,uc哈工大(威海)自动化研究所哈工大(威海)自动化研究所n 从整流运行向逆变运行转换从整流运行向逆变运行转换首先负载电流反向而向首先负载电流反向而向C C充电,充电,u ud d抬高,抬高,PIPI调节器出调节器出现负偏差,现负偏差,i id d减小后变为负值
14、,使交流输入电流相位减小后变为负值,使交流输入电流相位和电压相位反相,实现逆变运行;和电压相位反相,实现逆变运行;稳态时,稳态时,u ud d和和 仍然相等,仍然相等,PIPI调节器输入恢复到零,调节器输入恢复到零,i id d为负值,并与逆变电流大小对应。为负值,并与逆变电流大小对应。 PWMPWM整流电路工作原理整流电路工作原理*du哈工大(威海)自动化研究所哈工大(威海)自动化研究所PWMPWM整流电路工作原理整流电路工作原理 和实际直流电压和实际直流电压u ud d比较后送入比较后送入PIPI调节器,调节器,PIPI调节器输调节器输 出为一直流电流信号出为一直流电流信号i id d,i
15、 id d的大小和整流器交流输入电流的大小和整流器交流输入电流 的幅值成正比;的幅值成正比;*du 负载电流增大时,负载电流增大时,C放电而使放电而使ud下降,下降,PI输入端出现正偏输入端出现正偏 差,输出差,输出id增大,交流输入电流增大,增大,交流输入电流增大,ud回升。达到新的回升。达到新的 稳态时,稳态时,ud和和 相等,相等,PI调节器输入为零,而调节器输入为零,而id则稳定为则稳定为 新的较大值,与较大负载电流和较大交流输入电流对应;新的较大值,与较大负载电流和较大交流输入电流对应;*du哈工大(威海)自动化研究所哈工大(威海)自动化研究所PWMPWM整流电路工作原理整流电路工作
16、原理 稳态时,稳态时,u ud d= = ,PIPI调节器输入为零,调节器输入为零,PIPI调节器输出调节器输出i id d 和负载电流大小对应,也和交流输入电流幅值相对应;和负载电流大小对应,也和交流输入电流幅值相对应;*du 负载电流减小时,调节过程和上述过程相反。负载电流减小时,调节过程和上述过程相反。 上乘法器是上乘法器是i id d分别乘以和分别乘以和a a、b b、c c三相电压同相位的正三相电压同相位的正 弦信号,再乘电阻弦信号,再乘电阻R R,得到各相电流在得到各相电流在R Rs s上压降上压降u uRaRa、u uRb Rb 和和u uRcRc; 下乘法器是下乘法器是i id
17、 d分别乘以比分别乘以比a a、b b、c c三相电压相位超前三相电压相位超前/2/2 的余弦信号,再乘电感的余弦信号,再乘电感L L的感抗,得各相电流在电感的感抗,得各相电流在电感L Ls s 上的压降上的压降u uLaLa、u uLbLb和和u uLcLc;n 算法说明算法说明哈工大(威海)自动化研究所哈工大(威海)自动化研究所 各相电压各相电压u ua a、u ub b、u uc c分别减去前面求得的输入电流在电分别减去前面求得的输入电流在电阻阻R R和电感和电感L L上的压降,得到所需要的交流输入端各相电上的压降,得到所需要的交流输入端各相电压压u uA A、u uB B和和u uC
18、C,用该信号对三角波载波进行调制,得到,用该信号对三角波载波进行调制,得到PWMPWM开关信号去控制整流桥,得到需要的控制效果。开关信号去控制整流桥,得到需要的控制效果。n 存在的问题存在的问题在信号运算过程中用到电路参数在信号运算过程中用到电路参数L Ls s和和R Rs s,当当L Ls s和和R Rs s的运的运 算值和实际值有误差时,会影响到控制效果;算值和实际值有误差时,会影响到控制效果;本方法是基于系统静态模型设计,其动态特性较差;本方法是基于系统静态模型设计,其动态特性较差;间接电流控制系统应用较少。间接电流控制系统应用较少。PWMPWM整流电路工作原理整流电路工作原理哈工大(威
19、海)自动化研究所哈工大(威海)自动化研究所7.7.直接电流控制直接电流控制 通过运算求出交流输入电流指令值,再引入交流电流通过运算求出交流输入电流指令值,再引入交流电流反馈,通过对交流电流的直接控制使其跟踪指令电流值。反馈,通过对交流电流的直接控制使其跟踪指令电流值。图图1313给出一种采用电流滞环比较法的控制系统结构。给出一种采用电流滞环比较法的控制系统结构。 图图13.13.直接电流控制系统结构直接电流控制系统结构PWMPWM整流电路工作原理整流电路工作原理哈工大(威海)自动化研究所哈工大(威海)自动化研究所n 控制系统组成控制系统组成外环外环PIPI调节器输出为调节器输出为i id d,
20、i id d分别乘以和分别乘以和a a、b b、c c三相相三相相电压同相位的正弦信号,得到三相交流电流的正弦指令电压同相位的正弦信号,得到三相交流电流的正弦指令信号信号 , 和和 ;双闭环控制外环是直流电压控制环,内环是交流电流控双闭环控制外环是直流电压控制环,内环是交流电流控制环;制环; , 和和 分别和各自的电源电压同相位,其幅值和分别和各自的电源电压同相位,其幅值和反映负载电流大小的直流信号反映负载电流大小的直流信号i id d成正比,这是整流器运成正比,这是整流器运行时所需的交流电流指令信号;行时所需的交流电流指令信号;*ai*bi*ci*ai*bi*ciPWMPWM整流电路工作原理
21、整流电路工作原理哈工大(威海)自动化研究所哈工大(威海)自动化研究所指令信号和实际交流电流信号比较后,通过滞环对器件指令信号和实际交流电流信号比较后,通过滞环对器件 进行控制,使实际交流输入电流跟踪指令值。进行控制,使实际交流输入电流跟踪指令值。n 控制系统优点控制系统优点 控制系统结构简单,电流响应速度快,系统鲁棒性好。控制系统结构简单,电流响应速度快,系统鲁棒性好。PWMPWM整流电路工作原理整流电路工作原理哈工大(威海)自动化研究所哈工大(威海)自动化研究所可控整流技术可控整流技术-PWM-PWM整流技术整流技术 方案方案1 1哈工大(威海)自动化研究所哈工大(威海)自动化研究所可控整流
22、技术可控整流技术-PWM-PWM整流技术整流技术 方案方案1 1哈工大(威海)自动化研究所哈工大(威海)自动化研究所可控整流技术可控整流技术-PWM-PWM整流技术整流技术 方案方案2哈工大(威海)自动化研究所哈工大(威海)自动化研究所可控整流技术可控整流技术-PWM-PWM整流技术整流技术 方案方案3哈工大(威海)自动化研究所哈工大(威海)自动化研究所可控整流技术可控整流技术-PWM-PWM整流技术整流技术 方案方案3 3哈工大(威海)自动化研究所哈工大(威海)自动化研究所可控整流技术可控整流技术-PWM-PWM整流技术整流技术 参考文献参考文献1哈工大(威海)自动化研究所哈工大(威海)自动
23、化研究所摘要:为提高整流器在负载大扰动范围内电压响应速度,提出一种直摘要:为提高整流器在负载大扰动范围内电压响应速度,提出一种直接电压控制方法及算法。该算法突破传统双环级联控制方式,由电压接电压控制方法及算法。该算法突破传统双环级联控制方式,由电压误差直接控制输入变量,达到母线电压快速镇定目标。误差直接控制输入变量,达到母线电压快速镇定目标。论文建立一种论文建立一种由电压误差和负载电流误差并行的直接控制规律。利用整流器模型和由电压误差和负载电流误差并行的直接控制规律。利用整流器模型和电压误差方程对系统稳态,以及不同负载扰动下动态性能进行定量分,电压误差方程对系统稳态,以及不同负载扰动下动态性能
24、进行定量分,给出系统参数存在误差时的影响。论文在简化控制变量和减少计算变给出系统参数存在误差时的影响。论文在简化控制变量和减少计算变量的同时,能够保证全局稳定收敛,提高电压在负载大范围扰动下的量的同时,能够保证全局稳定收敛,提高电压在负载大范围扰动下的响应速度。响应速度。关键词:整流器;空间矢量脉宽调制;状态反馈;非线性控制;关键词:整流器;空间矢量脉宽调制;状态反馈;非线性控制; 输入输出线性化;直接控制。输入输出线性化;直接控制。可控整流技术-PWM整流技术 参考文献1哈工大(威海)自动化研究所哈工大(威海)自动化研究所可控整流技术可控整流技术-PWM-PWM整流技术整流技术 参考文献参考
25、文献2 2哈工大(威海)自动化研究所哈工大(威海)自动化研究所可控整流技术可控整流技术-PWM-PWM整流技术整流技术 参考文献2摘要:针对三相电压型脉宽调制整流器交流侧电感电阻、开关器件等效电阻和频率等参数不确定性带来的控制系统稳态误差较大等问题,提出一种自适应跟踪控制算法。通过对PWM整流器直接功率控制系统建模与分析,证明这类欠驱动系统符合L2-增益干扰抑制定理的条件。根据L2-增益干扰抑制定理得系统自适应率,给出自适应跟踪控制算法实现过程。关键词:PWM 整流器;欠驱动;L2 增益干扰抑制定理; 自适应跟踪控制。哈工大(威海)自动化研究所哈工大(威海)自动化研究所可控整流技术可控整流技术
26、-PWM-PWM整流技术整流技术 参考文献3哈工大(威海)自动化研究所哈工大(威海)自动化研究所可控整流技术可控整流技术-PWM-PWM整流技术整流技术 参考文献3摘要:同步旋转摘要:同步旋转d d- -q q 坐标系下电压、电流双闭环控制,广泛应用于三坐标系下电压、电流双闭环控制,广泛应用于三相电压型相电压型PWM PWM 整流器。整流器。该方案适合基于数字处理芯片的数字控制系统。该方案适合基于数字处理芯片的数字控制系统。由于交流侧电感工艺存在差异,且当电流很大电感饱和时,电感值也由于交流侧电感工艺存在差异,且当电流很大电感饱和时,电感值也会有变化,实际控制系统往往忽略掉耦合项;电压外环非线
27、性使得控会有变化,实际控制系统往往忽略掉耦合项;电压外环非线性使得控制系统性能提升受到限制。本文提出一种新的电压电流双闭环控制策制系统性能提升受到限制。本文提出一种新的电压电流双闭环控制策略,电流内环借鉴合成矢量思想,提出同步旋转略,电流内环借鉴合成矢量思想,提出同步旋转d d- -q q 坐标系下无电感坐标系下无电感L L参数的电流解耦控制方法;电压外环采用电压平方为控制量实现线性参数的电流解耦控制方法;电压外环采用电压平方为控制量实现线性化的间接电压控制。化的间接电压控制。关键词:关键词:PWM PWM 整流;无电感值解耦控制;电压平方;双闭环。整流;无电感值解耦控制;电压平方;双闭环。哈
28、工大(威海)自动化研究所哈工大(威海)自动化研究所可控整流技术可控整流技术-PWM-PWM整流技术整流技术 参考文献参考文献4 4哈工大(威海)自动化研究所哈工大(威海)自动化研究所可控整流技术可控整流技术-PWM-PWM整流技术整流技术 参考文献5哈工大(威海)自动化研究所哈工大(威海)自动化研究所PWMPWM控制技术总结控制技术总结一、一、PWMPWM控制技术的地位控制技术的地位 PWM PWM控制技术在电力电子领域有着广泛的应用,并对电力控制技术在电力电子领域有着广泛的应用,并对电力电子技术产生十分深远的影响。电子技术产生十分深远的影响。二、器件与二、器件与PWMPWM技术关系技术关系 IGBT IGBT、电力电力MOSFETMOSFET等为代表的全控型器件的不断完善给等为代表的全控型器件的不断完善给PWMPWM控制技术提供强大的物质基础。控制技术提供强大的物质基础。三、三、PWMPWM控制技术用于直流斩波电路控制技术用于直流斩波电路 直流斩波电路实际上就是直流直流斩波电路实际上就是直流PWMPWM电路,是电路,是PWMPWM控制技术较控制技术较成熟较早的一类电路,应用于直流电动机调速系统就构成成熟较早的一类电
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 木质素改良黄土力学特性试验研究
- 2025至2030年中国粗皮刀行业发展研究报告
- 2025至2030年中国立式铝液精炼机市场调查研究报告
- 2025至2030年中国立式冰热饮水机市场分析及竞争策略研究报告
- 2025至2030年中国硫酸盐镀锌光亮剂行业发展研究报告
- 2025至2030年中国盖革计数器行业投资前景及策略咨询研究报告
- 幼儿园传统节日活动的策划计划
- 提升个人财务素养的方法与途径计划
- 学校社团工作计划提升学生体育水平
- 修缮工程合同协议书修缮合同
- 高二入团考试试题及答案
- 河南郑州大学第二附属医院招聘笔试真题2024
- GB/T 45315-2025基于LTE-V2X直连通信的车载信息交互系统技术要求及试验方法
- 《中国脑卒中防治报告(2023)》
- 吉林省吉林市2024-2025学年高三下学期3月三模试题 政治 含答案
- 湖北省圆创教育教研中心2025届高三三月联合测评物理试题及答案
- 五下语文期中复习知识点
- 城市轨道交通轨道设备运营维保方案终稿
- 陈仓《我有一棵树》阅读答案
- 山东省青岛市市南区2024-2025学年上学期九年级期末质量监测九年级数学试题 (原卷版+解析版)
- 2025年开封大学单招职业适应性测试题库新版
评论
0/150
提交评论