


版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
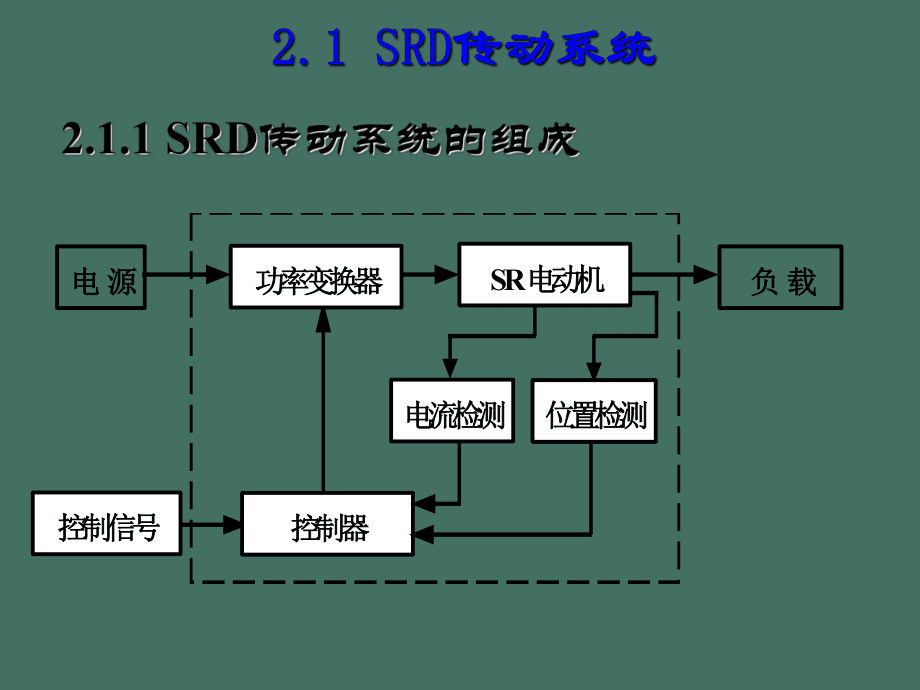
1、2.1 SRM 传动系统传动系统2.2 SRM 基本方程与性能分析基本方程与性能分析2.3 SRD的的 控制原理控制原理2.4 SRD 的功率变换器的功率变换器2.5 SRD 传动系统的反馈信号检测传动系统的反馈信号检测2.6 SRD 控制系统原理及其实现控制系统原理及其实现2.7 基于单片机的基于单片机的SRD控制系统控制系统2.8 基于基于DSP的的SRD控制系统控制系统2.9 开关磁阻发电机开关磁阻发电机 位位置置检检测测 功功率率变变换换器器 SR电电动动机机 电电流流检检测测 控控制制信信号号 控控制制器器 电电 源源 负负 载载 电机原理演示电机原理演示磁通总要沿着磁阻最小路径闭合
2、,一定形状的铁心磁通总要沿着磁阻最小路径闭合,一定形状的铁心在移动到最小磁阻位置时,必定使自己的轴线与主在移动到最小磁阻位置时,必定使自己的轴线与主磁场的轴线重合磁场的轴线重合A-A 通电通电 1-1 与与A-A重合重合B-B 通电通电 2-2 与与B-B重合重合C-C 通电通电 3-3 与与C-C重合重合D-D 通电通电 1-1 与与D-D重合重合12/8 极三相开关磁阻电动机极三相开关磁阻电动机 以不同的颜色表示磁场强弱,蓝色磁场最弱,绿色强 当某一相通电时,磁极极尖处磁场强22 )srsNkmNNk=1 1、为了避免单边磁拉力,径向必须对称,所以、为了避免单边磁拉力,径向必须对称,所以双
3、凸极的定子和转子齿槽数应为偶数。双凸极的定子和转子齿槽数应为偶数。2 2、定子和转子齿槽数不相等,但应尽量接近。、定子和转子齿槽数不相等,但应尽量接近。因为当定子和转子齿槽数相近时,就可能加大定因为当定子和转子齿槽数相近时,就可能加大定子相绕组电感随转角的平均变化率,这是提高电子相绕组电感随转角的平均变化率,这是提高电机出力的重要因素。机出力的重要因素。 相数相数 3 4 5 6 7 8 9定子极数定子极数 6 8 10 12 14 16 18转子极数转子极数 4 6 8 10 12 14 16步进角步进角(度度) 30 15 9 6 4.28 3.21 2.5 SR电机常用方案电机常用方案
4、PM PM (1) 2-phase 4 stator pole/2 rotor pole(2) 4-phase 8 stator pole/6 rotor pole(3) 3-phase 6 stator pole/4 rotor pole(4) 5-phase 10 stator pole/8 rotor pole1)1)电动机结构简单、成本低、适用于高速电动机结构简单、成本低、适用于高速, , 开关磁阻电动机的结构比通常认为最简开关磁阻电动机的结构比通常认为最简单的鼠笼式感应电动机还要简单。单的鼠笼式感应电动机还要简单。2)2)功率电路简单可靠功率电路简单可靠 因为电动机转矩方因为电动机转
5、矩方向与绕组电流方向无关,即只需单方向向与绕组电流方向无关,即只需单方向绕组电流,故功率电路可以做到每相一绕组电流,故功率电路可以做到每相一个功率开关。个功率开关。3)3)各相独立工作,可构成极高可靠性系统各相独立工作,可构成极高可靠性系统 从从电动机的电磁结构上看,各相绕组和磁路相电动机的电磁结构上看,各相绕组和磁路相互独立,各自在一定轴角范围内产生电磁转互独立,各自在一定轴角范围内产生电磁转矩。而不像在一般电动机中必须在各相绕组矩。而不像在一般电动机中必须在各相绕组和磁路共同作用下产生一个圆形旋转磁场,和磁路共同作用下产生一个圆形旋转磁场,电动机才能正常运转。电动机才能正常运转。4)4)高
6、起动转矩,低起动电流高起动转矩,低起动电流 控制器从电源侧控制器从电源侧吸收较少的电流,在电机侧得到较大的起动吸收较少的电流,在电机侧得到较大的起动转矩是本系统的一大特点。转矩是本系统的一大特点。 (SR:0.4IN,1.4TN IM:6-7IN,2-3TNSR:0.4IN,1.4TN IM:6-7IN,2-3TN)5)5)适用于频繁起停及正反向转运行适用于频繁起停及正反向转运行 SRDSRD系统具有的高起动转矩,低起动电流系统具有的高起动转矩,低起动电流的特点,使之在起动过程中电流冲击的特点,使之在起动过程中电流冲击小,电动机和控制器发热较连续额定小,电动机和控制器发热较连续额定运行时还小。
7、运行时还小。6)6)可控参数多,调速性能好可控参数多,调速性能好 控制开关控制开关磁阻电动机的主要运行参数和常用方磁阻电动机的主要运行参数和常用方法至少有四种法至少有四种: :相开通角相开通角, ,相关断角相关断角, , 相电流幅值相电流幅值, ,相绕组电压。相绕组电压。7)7)效率高,损耗小效率高,损耗小 SRDSRD系统是一种系统是一种非常高效的调速系统。非常高效的调速系统。8)8)可通过机和电的统一协调设计满可通过机和电的统一协调设计满足各种特殊使用要求足各种特殊使用要求 。9)9)缺陷:转矩脉动、振动、噪声缺陷:转矩脉动、振动、噪声 但但可通过特殊设计克服可通过特殊设计克服航空工业航空
8、工业 家用电器家用电器 机械传动机械传动 精密伺服系统精密伺服系统 电动车电动车 SR电机设计研究:电机设计研究: 铁心损耗计算、转矩脉动、噪声、优化设计等理论铁心损耗计算、转矩脉动、噪声、优化设计等理论 SR电机的控制策略研究:电机的控制策略研究: 最优控制,减小转矩脉动、降低噪声最优控制,减小转矩脉动、降低噪声 具有较高动态性能、算法简单、可抑制参数变化、具有较高动态性能、算法简单、可抑制参数变化、扰动及各种不确定性干扰的新型控制策略扰动及各种不确定性干扰的新型控制策略 智能控制策略智能控制策略 SR电机的无位置传感器控制电机的无位置传感器控制 SR电机的振动、噪声研究电机的振动、噪声研究
9、 无轴承无轴承SR电机研究磁悬浮)电机研究磁悬浮) SR电机应用研究:电动车、发电机、一体化电机等电机应用研究:电动车、发电机、一体化电机等不计磁滞、涡流及绕组间互感时,不计磁滞、涡流及绕组间互感时,m相相SR电电机系统示意图机系统示意图 J转子与负载的转动惯量转子与负载的转动惯量 D粘性摩擦系数粘性摩擦系数 TL负载转矩负载转矩 Te K J TL R1 d 1/dtt1 u1 + - . . . Rm d m/dt um + - 耦合磁场耦合磁场 i1 im 第第k相绕组的相电压平衡方程相绕组的相电压平衡方程:所以:所以:电阻压降电阻压降kkkkk kkkkkk kkkkkdidUR ii
10、dtdtLdiL dR iLiiidtdtqqqq Y Y=+抖骣抖琪=+琪抖桫22eLddTJDTdtdtqq=+0( ,)iWcidiq=YY-iY-i( , )ceWiTqq=2 /0( , )2rNravemNTT idpqqp= 1 0 2 3 0 4 5 SR电机相电感随转子位置变化电机相电感随转子位置变化stator = 1位置位置rotor转子凹槽前沿与定子磁极前沿相遇位置转子凹槽前沿与定子磁极前沿相遇位置 1stator =0o位置位置rotor定子磁极轴线与转子凹槽中心重合定子磁极轴线与转子凹槽中心重合 =0ostator = 2位置位置rotor转子磁极前沿与定子磁极前沿
11、相遇位置转子磁极前沿与定子磁极前沿相遇位置 2stator = 3位置位置转子磁极前沿与定子磁极前沿重合位置转子磁极前沿与定子磁极前沿重合位置rotor 3stator = 4位置位置rotor转子凹槽前沿与定子磁极后沿重合位置转子凹槽前沿与定子磁极后沿重合位置 4stator = 5位置位置rotor转子凹槽前沿与定子磁极前沿相遇位置转子凹槽前沿与定子磁极前沿相遇位置 5 1 0 2 3 0 4 5 =0 定子磁极轴线与转子凹槽中心重合定子磁极轴线与转子凹槽中心重合 1( 5) 转子凹槽前沿与定子磁极前沿相遇位置转子凹槽前沿与定子磁极前沿相遇位置 2 转子磁极前沿与定子磁极前沿相遇位置转子磁
12、极前沿与定子磁极前沿相遇位置 3 转子磁极前沿与定子磁极前沿重合位置转子磁极前沿与定子磁极前沿重合位置 4 转子凹槽前沿与定子磁极后沿重合位置转子凹槽前沿与定子磁极后沿重合位置SR电机绕组电感的分段线性解析式:电机绕组电感的分段线性解析式:min122min23max34max445()( )()LKLLLLKqqqqqqqqqqqqqqqqq-+= -K=(Lmax-Lmin)/(3-2)= (Lmax-Lmin)/s相电流解析分析相电流解析分析ku0,sonoffsoffzonzUUqqqqqqqqqq+=-忽略电阻,相绕组电压方程:忽略电阻,相绕组电压方程:而:而: =L iSdUdtY
13、=didLdidLUsLiLidtdtdtdq =+=+W相电流解析分析相电流解析分析同时可以同时可以导出:导出:22233424500000TTKiTKiqqqqqqqqq= -KT为常数为常数sdidLULidtdq =+WsUdidLLiddqq=+WminsUdiLdq=Wmin( )sonUiLq qq-=Wmin2()sUCLKiqq q+=+-Wmin2min2min2()()()()sUdidLdiLiLKiKddddidiLKKiKdddid K iLKddq qqqqqqqqqqqq=+=+-+W=-+=-+min2()( )()sonUiLKqqqqq-=W+-min2(
14、2)( )()soffonUiLKqqqqqq-=W+-max(2)( )soffonUiLqqqq-=Wmax4(2)( )()soffonUiLKqqqqqq-=W-12min2min23min234max45max4()()(2)( )()(2)(2)()sonsonoffsoffonoffsoffonsoffonULULKUiLKULULKqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqqq-W-W+-=W+-W- W-开通角开通角关关断断角角 on 2 :电感上升,使绕组电流下降电感上升,使绕组电流下降 off 3 : 在电感达最大之前,绕组在电感达最大之前,绕组关
15、断,绕组续流。关断,绕组续流。 3 z 4 (z=2off-on) 在电感下降之前,续流结在电感下降之前,续流结束。否则会产生反向转矩束。否则会产生反向转矩典型电流波形典型电流波形 线性模型忽略了许多因素,计算结果误差很线性模型忽略了许多因素,计算结果误差很大,只能定性地说明影响电流、转矩的因素。大,只能定性地说明影响电流、转矩的因素。为避免繁琐计算,又近似考虑磁路的饱和效应,常为避免繁琐计算,又近似考虑磁路的饱和效应,常借助准线性模型:将实际非线性磁化曲线分段线性,借助准线性模型:将实际非线性磁化曲线分段线性,且不考虑磁耦合且不考虑磁耦合准线性模型分析准线性模型分析实际磁化曲线实际磁化曲线分段线性磁化曲线分段线性磁化曲线i1准线性模型绕阻电感准线性模型绕阻电感L(i,): 基于准线性模型,基于准线性模型,L(i, )是可解析的,可是可解析的,可以分别求出绕阻磁链与磁共能的分段解析式,以分别求出绕阻磁链与磁共能的分段解析式,由此得到由此得到SR电机的瞬时转矩的分段解析式:电机的瞬时转矩的分段解析式:22222minmaxmin1()()22off
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 音乐拍号基础知识
- 2025年行政执法资格考试行政法律法规知识考试题库及答案(共160题)
- 防火安全很重要讲解
- 语文-2021年西安市未央区小升初语文考试试卷真题部编版
- 经济学-中央财经大学803经济学综合真题
- 安全信息教育
- 输血反应护理措施
- 闭塞性细支气管炎的护理
- 直播策划与运营实务(第二版)教案 项目五任务一、确定直播目标和主题
- (高清版)DB5101∕T 140-2021 稻鱼菜立体生态种养技术规范
- 三年级下册语文七彩课堂
- 第7课 全球联系的初步建立与世界格局的演变 高中历史统编版(2019)必修中外历史纲要下册
- 《工程勘察设计收费标准》(2002年修订本)
- 在建项目汛前安全生产检查表
- 中国风传统文化家风家训主题PPT模板
- 华为终端合作手机硬件测试标准-V10.4发布版本
- 外科手术基本器械及其使用
- 植被砼护坡绿化施工组织设计
- GPON组网与华为MA5800-X15OLT配置
- 小学四年级综合实践活动课件.ppt
- 通用请假条Excel表格模板
评论
0/150
提交评论