



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、基于极点配置算法的列车横向半主动悬挂自适应PID控制系统设计基金项目:国家自然科学基金重点项目(61134002)作者简介:金光大(1986-),男,硕士研究生,主要研究方向:电气系统控制及信息技术 金炜东(1959-),男,教授,博士生导师,主要研究方向:智能信息处理,系统仿真,满意优化控制等 李明(1986-),男,硕士研究生,主要研究方向:电气工程及其自动化金光大 金炜东 李明(西南交通大学 电气工程学院,四川 成都 610031)摘要:为了使PID控制器具备自适应能力,以适应列车受到外部环境扰动时产生的结构参数变化,使用了增量式数字PID控制器,将PID控制器与极点配置控制算法结合,利
2、用极点配置算法在线实时优化,参数,设计了自适应极点配置PID控制器,实现了,参数的自动校正。最后给出基于极点配置自适应PID的高速列车半主动悬挂控制系统的设计方案,利用MATLAB-Simulink搭建仿真平台,进行了仿真。关键词:自适应;PID;悬挂系统;控制中图分类号:TP29 文献标识码:AVehicle Lateral Semi-active Suspension Control System Design Based on Pole Placement Algorithm Adaptive PID ControllerJinGuangda JinWeidong Liming(Scho
3、ol of Electrical Engineering, Southwest Jiaotong University, Chengdu 610031, China)Abstract: In order to make the PID controller to have the ability of the adaptation , adapting the changing of structural parameters which was changed when the train was interfered by the external environment , the in
4、cremental digital PID controller was used . The PID controller and the pole placement algorithm was combined to optimize the , and parameters online . The adaptive PID controller was designed . The , and parameters could be atuomatically corrected . The semi-active suspension control system of the h
5、igh-speed trains based on the pole placement algorithm adaptive PID controller was given at last . The simulation was carried out by using MATLAB-Simulink .Key words: adaptive ; PID ; suspension system ; control0 引言列车在国内及国外均是人员出行和货物运输的非常重要且不可或缺的交通工具,正由于列车的广泛应用性,对列车运行的稳定性和舒适性提出了较高的要求,而横向振动正是这一问题的关建所在
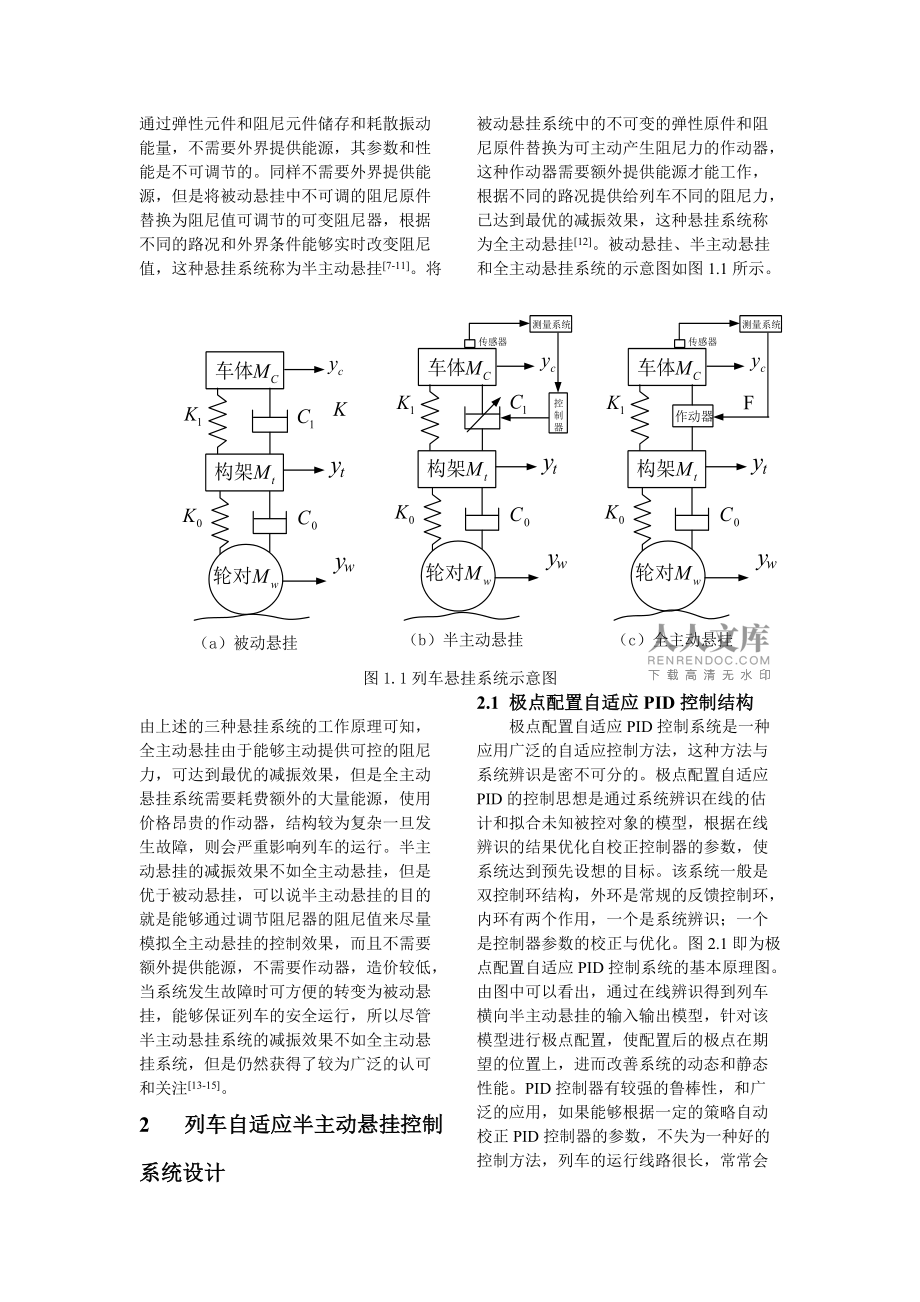
6、1,2。在列车的运行中横向振动幅值的大小与轨道不平顺,牵引力和制动力都有着直接和间接的关系,克服和减小列车的多自由度随机振动一直以来是一个备受关注的问题2,3,4。随着我国铁路运输的发展,列车逐步提高运行速度,这个问题变得更加重要,悬挂系统正是解决该问题的设备与装置。悬挂系统是一系列装置的组合体,包括轮对与构架,构架与车体之间多个弹性元件和阻尼元件,起到减小振动的作用5,6。1 列车半主动悬挂系统的提出列车的悬挂系统分为被动悬挂,半主动悬挂和全主动悬挂,其中被动悬挂系统通过弹性元件和阻尼元件储存和耗散振动能量,不需要外界提供能源,其参数和性能是不可调节的。同样不需要外界提供能源,但是将被动悬挂
7、中不可调的阻尼原件替换为阻尼值可调节的可变阻尼器,根据不同的路况和外界条件能够实时改变阻尼值,这种悬挂系统称为半主动悬挂7-11。将被动悬挂系统中的不可变的弹性原件和阻尼原件替换为可主动产生阻尼力的作动器,这种作动器需要额外提供能源才能工作,根据不同的路况提供给列车不同的阻尼力,已达到最优的减振效果,这种悬挂系统称为全主动悬挂12。被动悬挂、半主动悬挂和全主动悬挂系统的示意图如图1.1所示。图1.1列车悬挂系统示意图由上述的三种悬挂系统的工作原理可知,全主动悬挂由于能够主动提供可控的阻尼力,可达到最优的减振效果,但是全主动悬挂系统需要耗费额外的大量能源,使用价格昂贵的作动器,结构较为复杂一旦发
8、生故障,则会严重影响列车的运行。半主动悬挂的减振效果不如全主动悬挂,但是优于被动悬挂,可以说半主动悬挂的目的就是能够通过调节阻尼器的阻尼值来尽量模拟全主动悬挂的控制效果,而且不需要额外提供能源,不需要作动器,造价较低,当系统发生故障时可方便的转变为被动悬挂,能够保证列车的安全运行,所以尽管半主动悬挂系统的减振效果不如全主动悬挂系统,但是仍然获得了较为广泛的认可和关注13-15。2 列车自适应半主动悬挂控制系统设计2.1 极点配置自适应PID控制结构极点配置自适应PID控制系统是一种应用广泛的自适应控制方法,这种方法与系统辨识是密不可分的。极点配置自适应PID的控制思想是通过系统辨识在线的估计和
9、拟合未知被控对象的模型,根据在线辨识的结果优化自校正控制器的参数,使系统达到预先设想的目标。该系统一般是双控制环结构,外环是常规的反馈控制环,内环有两个作用,一个是系统辨识;一个是控制器参数的校正与优化。图2.1即为极点配置自适应PID控制系统的基本原理图。由图中可以看出,通过在线辨识得到列车横向半主动悬挂的输入输出模型,针对该模型进行极点配置,使配置后的极点在期望的位置上,进而改善系统的动态和静态性能。PID控制器有较强的鲁棒性,和广泛的应用,如果能够根据一定的策略自动校正PID控制器的参数,不失为一种好的控制方法,列车的运行线路很长,常常会遇到不同的扰动和路况,单一不变的PID参数,不能使
10、列车在任何路况下都运行在最优状态下,所以需要根据不同的扰动和路况对PID参数进行实时调节,才能取得较好的控制效果。17自由度列车模型辨识PID参数计算器扰动可调参数PID控制器+-图2.1极点配置自适应PID控制结构图2.2 极点配置的实现使用在自适应控制中应用较为广泛的CARMA(Controller Auto-Regressive Integrated Moving Average)模型: (1)其中为延迟算子,先使用增广递推最小二乘法对CARMA模型中的未知参数进行辨识,再将系统的反馈控制律设计为: (2)式中 (3) (4)将式(2)代入式(1),整理得: (5)可见,通过在线辨识得到
11、的系统输入输出模型的特征多项式为: (6)设系统期望的特征多项式为: (7)其中 (8)式(8)中,为相应的稳定极点,本文中考虑到最佳二阶工程参数,将期望的闭环系统设计为自然振荡频率为和阻尼系数的二阶系统,超调量约为4.3%,调整时间约为0.42 s(),其闭环特征多项式为: (9)对式(9)使用反向差分进行离散化,这里的延迟算子和离散时间系统常用的是具有同样意义的,根据拉式变换和变换的关系有:,为采样周期,再将展开为无穷级数得: (10)对式(10)取一阶近似得:则有: (11)将式(11)代入式(9),并取得式(9)的离散化为: (12)由式(12)可知期望的闭环极点为:为了实现极点配置,
12、就要使系统的特征多项式与期望的特征多项式相等,综合式(6)、(7)和(12)得: (13)式(13)的解法与丢番图方程的解法是类似的,通过令等号两边同次幂的项系数相等即可确定和中的未知系数,为了保证式(13)有解,需要使与阶次相等,的阶次小于或等于和的阶次,即 (14)把式(13)代入式(5)整理简化,即可得到系统经过极点配置后的闭环方程: (15)由式(15)可见,系统的特征多项式为期望的特征多项式2.3 PID参数的优化首先介绍一下本文所使用的增量式PID控制器增量式PID算法如式(16)所示: (16)其中、和分别为比例,积分和微分参数,并且 (17)对式(16)进行化简整理,式(16)
13、可以表示为: (18)其中 (19)用作为单位延时算子,则对式(18)进行进一步整理,可得: (20)式(20)可表示为 (21)其中 (22)考虑到在列车横向半主动悬挂控制系统中,参考输入总是0,则式(21)可写为: (23)将式(23)代入式(1)中,整理得: (24)由式(24)可见系统的特征多项式为: (25)比较式(25)与式(6)可知,使用增量式PID控制器与使用自适应极点配置控制器的特征多项式恰好是相同的,因此可以同样使用极点配置的方法使得PID控制器中的、和参数实现在线自我校正,自动寻优,仍然使用式(7),(12)和(13)来实现自适应PID控制器的极点配置,由式(7),(12
14、)和(13)确定了中的未知参数、和后,为了获得在线优化后的PID参数,需要解式(19)这个线性方程组,由式(19)本身可知,解该线性方程组显然是非常简单的,完全不会影响控制系统的实时性,最后把解得的、和参数赋给参数可变的PID控制器,即实现了自校正PID控制,3 基于Simulink的列车半主动悬挂自适应PID控制系统仿真采用Simulink对车辆半主动悬挂系统进行数字仿真,如图3.1所示图3.1基于simulink的车辆半主动悬挂系统仿真车体的横向振动情况可由振动加速度时域图比较直观的反映出来,如图3.2所示。图中把半主动悬挂与被动悬挂的车体横向振动加速度进行了对比,通过该时域图可以对某一时
15、刻车体在被动和半主动悬挂两种不同悬挂方式下的横向振动幅值进行观察,可以看出相对于被动悬挂,自适应控制取得了一定的控制效果,与被动悬挂相比较车体横向加速度的时域幅值有所下降。图3.2车体横向振动加速度时域图图3.3为功率谱图,从功率谱图中可以看出相对于被动悬挂,半主动悬挂自适应控制的车体横向振动加速度在频率低于10Hz的低频带得到了一定程度的控制,尤其在人体能明显感知振动的频带0.73.5HZ改善效果较为明显图3.3车体横向振动加速度功率谱图图3.4为频域图,通过频域分析可以看出列车车体的横向振动加速度主要集中在低频段0.510HZ左右,相对于被动悬挂,半主动悬挂自适应控制的车体横向加速度的频域
16、幅值均有所下降图4车体横向振动加速度频谱图相比于被动悬挂系统,基于极点配置自适应PID的半主动悬挂控制系统的车体横向加速度有较大减小,其最大值由0.4876m/s2降低到0.3124m/s2,改善35.9%,其均方根由0.3764m/s2下降到0.2781m/s2改善26.13%。4 结语通过仿真分析可知,将自适应控制理论与方法应用于列车的半主动悬挂控制是可行的,自适应控制方法取得了较好的控制效果,基于极点配置的自适应PID控制器与传统的PID控制器较为为相似,但是其与传统的PID控制器相比可以自动校正比例、积分和微分三种参数,适应性更强,并且继承了传统PID控制器的鲁棒性,具有较强的可应用性
17、。参考文献1 岳三玲,卜继玲等. 基于Simulink的车辆动力学仿真模型研究J. 机械设计制造与自动化,2010,24(1):231-2362 郁家杰基于DMC的车辆横向半主动 悬挂控制D成都:西南交通大学, 2010,4-273 D. Karnopp,M. J. Crosby and R. A. Harwood. Vibration Control using Semi-Active Force GeneratorJ. ASME Journal of Engineering of Industry,2004,103(4):619-6124G. N. Sarma,F. Kozin. An A
18、ctive Suspension system Design for the Lateral Dynamic of a High-Speed Wheel-rail SystemJ. Journal of Dynamic Systems, Measurement and Control. 1971,86(4):233-2415P. K. Sinha,D. N. Wormley,J. K. Hedrik. Rail Passenger Vehicle Lateral Dynamic Performance Improvement Through active controlJ. Transacti
19、on of ASME,1998,100(3): 271-283.6 Goodall R M. Active controls in Ground Transportation-a Review of the State-the-art and Future PotentialJ. Vehicle system dynamic,2003,78(12): 225-257.7 Mortland K, Hedrick J K. Dynamic Performance Improvement Through Active controlJ. Transaction of ASME, 2011, 126(
20、2):109-111.8 G W Celiniker, J K Hedrick. Rail Vehicle Active Suspensions for Lateral Rail and stability ImprovementJ. Transaction of the ASME,2007, 104(7):100-106.9 Goodall R M. Active controls in Ground Transportation- a Review of the State-the-art and Future PotentialJ. Vehicle system dynamic, 198
21、3,88(12): 225-257.10 Goodall E M. Active Railway Suspension: Implementation Status and Technological TrendsJ. Vehicle System Dynamics, 1998,134(12):87-117.11 Thompson, A. G. An Active Suspension with Optimal Linear State FeedbackJ, Vehicle System Dynamics, 2009,95(5):187-203.12J .K. Hedrick. Railway Vehicle Activ
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 区政府党组先进性教育 整改方案
- 《2025企业员工合同续签意向书与签订确认函》
- 2025【合同范本】钢材供销合同
- 2025合同范本车队维护合同模板
- 2025智能家居中央空调系统安装合同
- 安徽省合肥市2024~2025学年 高一下册第三次过程性评价数学试卷附解析
- 神秘传承的传承者觉醒基础知识点归纳
- 郑州大学招聘辅导员笔试真题2024
- 道德与法治(湖北卷)2025年中考考前押题最后一卷
- 家庭托育点的人员培训与专业化发展路径
- 浙江首考2025年1月普通高等学校招生全国统考化学试题及答案
- 富士康公司组织架构及部门职责
- 2024年股权转让合作备忘录
- 《常怀敬畏之心》课件
- TSZUAVIA 001-2021 低慢小无人机探测反制系统要求
- 糖尿病管理制度
- 2025年中国五矿招聘笔试参考题库含答案解析
- 北斗创新设计导航知到智慧树章节测试课后答案2024年秋山东大学
- 数据结构(本)-002-国开机考复习资料
- 【MOOC】中国衣裳-传统服装文化-西南交通大学 中国大学慕课MOOC答案
- 【MOOC】经济法学-西南政法大学 中国大学慕课MOOC答案
评论
0/150
提交评论