



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
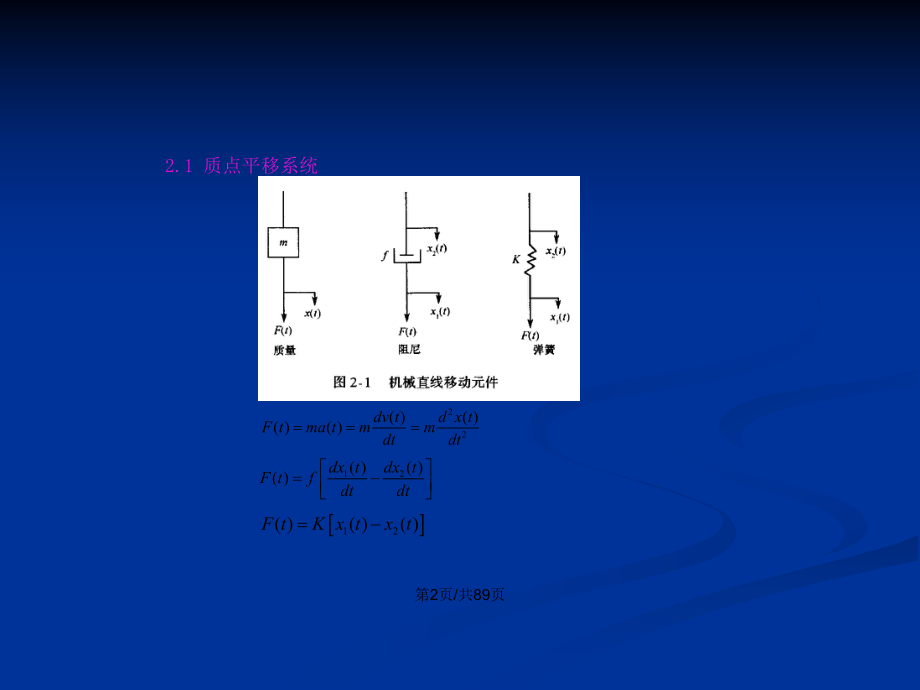
1、会计学1机电一体化系统数学建模新机电一体化系统数学建模新第二章 受控机械系统分析建立受控机械系统动态模型的理论依据:动力学普遍定律,如牛顿第二定律、欧拉动力学方程、拉格朗日方程、相关的运动学方程以及产生电场力和磁场力的方程。 建立受控机械系统动态模型的具体做法:首先,列写系统微分方程组;然后,通过拉氏变换将微分方程组转换为等价的代数方程组,并根据代数方程组画出系统的传递函数方块图;最后,通过方块图简化,或消去代数方程组的中间变量,获得感兴趣的输出拉氏变换与输入拉氏变换之比的系统传递函数。第1页/共89页2.1 质点平移系统 22( )( )( )( )dv td x tF tma tmmdtd
2、t12( )( )( )dx tdx tF tfdtdt12( )( )( )F tK x tx t第2页/共89页2.1 质点平移系统 建立由质点弹簧阻尼器组成的质点平移系统的动态数学模型时,一般利用牛顿第二定律列写该系统的动力学微分方程。具体方法是:首先,系统中的每一个质点必须列写一个微分方程;其次,每一个微分方程的左边为该质点的惯性力(即质量与加速度的乘积),右边等于与该质点相连结的弹簧力和阻尼力以及外作用力之和;第三,注意弹簧力和阻尼力都是起阻止质点运动的,应按照这一物理原理决定这两个作用力的符号。 第3页/共89页第4页/共89页第5页/共89页2.1 质点平移系统 问题1 考虑单自
3、由度质量弹簧系统,质量为m的质点通过刚度为K的弹簧和阻尼系数为b的阻尼器悬挂在机壳上,建立质点平移系统数学模型。2221212( )()()d xdxdxmf tbK xxdtdtdt解答:系统的微分方程为 22122( )d xd xdxmbKxmf tdtdtdt12xxx质点相对壳体的位移为 222( )2( )nnd xdxf txa tdtdtm2bKmnKm自然频率 阻尼比 第6页/共89页2.1 质点平移系统 问题1 解答:222( )2( )nnd xdxf txa tdtdtm22( )(2)( )( )nnF sssX sA sm拉氏变换: 22( )1( )2nnX sA
4、 sss由加速度作为输入、质点相对壳体的位移作为输出,系统的传递函数为: 第7页/共89页2.1 质点平移系统 问题2 质点振动系统。这是一个单轮汽车支撑系统的简化模型。m1代表汽车质量,B代表振动阻尼器,K1为弹簧,m2为轮子的质量,K2为轮胎的弹性,建立质点平移系统数学模型。 211211122()()d xdxdxmBK xxdtdtdt 2212121222( )()()dxdxdxmf tBK xxK xdtdtdt 解答:拉氏变换: 21112112( )( )( )( )( )m s XsBs XsXsK XsXs 2222112122( )( )( )( )( )( )( )m
5、 s XsF sBs XsXsK XsXsK Xs第8页/共89页2.1 质点平移系统 问题2 解答:21112112( )( )( )( )( )m s XsBs XsXsK XsXs 2222112122( )( )( )( )( )( )( )m s XsF sBs XsXsK XsXsK Xs第9页/共89页2.1 质点平移系统 问题2 解答:211112()( )()( )0m sBsK X sBsK Xs2112122()( )()( )( )BsKXsm sBsKKXsF s114321212111221212( )( )()()X sBsKF smm sB mm sKmKmK
6、m sK BsK K22114321212111221212( )( )()()X smsBsKF smm sB mm sKmKmK m sK BsK K第10页/共89页2.1 质点平移系统 习题1 图示机械平移系统的传递函数,并画出它们的动态结构方框图。 第11页/共89页2.1 质点平移系统 习题2 图示机械平移系统的传递函数,并画出它们的动态结构方框图。 第12页/共89页2.2 定轴旋转系统 转动惯量 弹簧 阻尼 22( )ddM tJJdtdt1212( )( )( )( )( )dtdtM tBBttdtdt12( ) ( )( )M tKtt第13页/共89页2.2 定轴旋转系
7、统 问题3 考虑打印机中的步进电动机-同步齿形带驱动装置,下图示其模型。图中,K、B分别表示同步齿形带的弹性和阻尼, M(t)为步进电动机的转矩,Jm和JL分别表示步进电动机转子和负载的转动惯量,i和o分别表示输入轴和输出轴的转角。 2002( )()()iimidddJM tBKdtdtdt20002()()iLidddJBKdtdtdt 解答:对输入轴列方程: 对输出轴列方程: 200( )()( )( )LiJ ssBsKss20( )( )()( )( )miiJ ssM sBsKss拉氏变换 第14页/共89页2.2 定轴旋转系统 问题3 解答:200( )()( )( )LiJ s
8、sBsKss20( )( )()( )( )miiJ ssM sBsKss第15页/共89页2.2 定轴旋转系统 问题3 解答:022( )( )()()mLmLmLsBsKJ JM sJJssBsKJJ第16页/共89页习题1 图示机械转动系统的传递函数,并画出它们的动态结构方框图。 2.2 定轴旋转系统 第17页/共89页习题2 图示机械转动系统的传递函数,并画出它们的动态结构方框图。 2.2 定轴旋转系统 第18页/共89页2.2 电路系统模型 电路网络电路网络包括无源电路网络和有源电路网络两部分。建立电路网络动态模型依据是电路方面的物理定律,如基尔霍夫定律。1ioouRiuuidtC1
9、、RC网络第19页/共89页第20页/共89页2、RC无源网络第21页/共89页得传递函数为:令 ,可得该网络频率特性为:sj3、无源双T网络第22页/共89页为 运算放大器的传递函数 4、运算放大器第23页/共89页5、比例微分调节器第24页/共89页2.3 液压、气压系统模型 应用流体驱动的动力缸或马达作为执行元件的系统,称为液、气伺服系统 液压伺服马达的传递函数 1、液压滑阀的流量方程第25页/共89页1、液压滑阀的流量方程第26页/共89页第27页/共89页第28页/共89页为了使问题简化,我们把非线性函数在工作点展成泰勒级数,取一阶近似式,得到增量方程。增量方程为:将方程的坐标零点置
10、于工作点,有QLI=0可得线性方程为第29页/共89页Kq为滑阀流量增益,Kc为滑阀流量压力系数。 2、液压缸流量连续性方程第30页/共89页引入泄露系数,可得左半腔流量连续方程为:同理,可得右半腔流量连续性方程为:设活塞工作面积为A,位移为y, 并假设活塞在中位附近有小位移,有第31页/共89页系统稳定时负载流量表示的液压缸的流量连续性方程:3、液压缸负载的力平衡方程 第32页/共89页对其进行拉普拉斯变换有 第33页/共89页可以建立阀控液压缸系统的动态结构图 第34页/共89页由图可以看出,位移Y为系统输出量,滑阀阀芯位移XV为给定输入量,外力F为干扰输入量第35页/共89页2.4 数字
11、系统模型 第36页/共89页第37页/共89页第38页/共89页2.3 机械传动装置 旋转直线变换丝杠螺母副 小齿轮齿条副 同步齿形带 第39页/共89页2.3 机械传动装置 旋转直线变换221122Jmv直线运动的负载质量可以等价转换为主动轴上的转动惯量 2vxL22()()2vLJmm22vxrr2Jmr第40页/共89页2.3 机械传动装置 速比折合 齿轮传动系统 2111112iddJBMMdtdt22212022ddJBMMdtdt1122MM221122211220221()iddddJBJBMMdtdtdtdt由轴1到轴2的传动比 12n22112112MnM第41页/共89页2
12、.3 机械传动装置 速比折合 齿轮传动系统 221122211220221()iddddJBJBMMdtdtdtdt22112112MnM22211112211221202()()iddJn JBn BMn Mdtdt211122eJJn J211122eBBn B0120eMn M第42页/共89页2.3 机械传动装置 速比折合 齿轮传动系统 221122211220221()iddddJBJBMMdtdtdtdt11221221MnM22222221122112102()()iddJn JBn Bn MMdtdt2222202eeieddJBMMdtdt122122JnJJe122122B
13、nBBeiieMnM21第43页/共89页2.3 机械传动装置 速比折合 齿轮传动系统 结论:由从动轴2向主动轴1折合,从动轴上的转动惯量、阻尼系数都要乘以由轴1到轴2的传动比的二次方,而转矩只乘以传动比的一次方。反之亦然。 第44页/共89页2.3 机械传动装置 非刚性传动链 2111122()idJMKdt22212122()dJKMdt 23323432()dJKMdt 2442432()dJKdt 33223223zMnzM2222432222()dn Jn KMdtn2222423121222()()()dJn JKn Kdtn 2444222(/ )()dnJKdtn 第45页/共
14、89页2.3 机械传动装置 非刚性传动链 2222423121222()()()dJn JKn Kdtn 2111122()idJMKdt2444222(/ )()dnJKdtn 第46页/共89页2.3 机械传动装置 非刚性传动链 拉氏变换 211112222423211222( )( )( )( )()( )( )( )( )iJ ssMKsssJn JssKssn Ksn244422( )( )( )ssJ sKsnn第47页/共89页2.3 机械传动装置 非刚性传动链 第48页/共89页2.3 机械传动装置 非刚性传动链 422221234242123412341221( )( )()
15、()1()()()isnM sJ JnJ JJJnJ JJ JnJnJJ sssKKJKJKJ221234JJJn Jn J第49页/共89页2.3 机械传动装置 非刚性传动链 结论:对于一个无功率消耗的传动系统,从动轴上的转动惯量J、黏性阻尼系数B以及弹性系数K折合到主动轴上,都必须乘以由主动轴到从动轴的传动比的二次方n2,才能得到等效的转动惯量n2 J等效的黏性阻尼系数n2 B以及等效的弹性系数n2 K 。而从动轴的转角和作用在从动轴上的转矩折合到主动轴上,则必须分别除以和乘以传动比n。这样,主动轴和等效的从动轴可以串接起来,作为单轴的机械转动系统处理。 第50页/共89页5. 机械结构因
16、素对伺服系统性能的影响第51页/共89页5.机械结构因素对伺服系统性能的影响闭环系统的传递函数为222021)()()(nnnPiPissKsPss二阶振荡环节特性iKKKKPmAV/VK系统的增益, 系统的阻尼比,MVTK 21nMVnTK式中: 系统的无阻尼固有频率, 第52页/共89页5. 机械结构因素对伺服系统性能的影响 e、Be是电机和整个系统折算到电机轴上的等效惯量和粘性系数,KT 是电机的转矩常数,Kb是反 电势常数,Ra 是电枢电路电阻。)/(aebTaemRBKKRJT系统的机电时间常数, MT)/(aebTTmRBKKKK伺服电机的速度增益, mKiP 伺服系统工作时,要求
17、系统的输出能平稳地、快速地、准确地跟随输入指令动作。伺服系统的性能指标与系统的机械、电气参数均有密切关系。 机械结构方面的非线性:非线性摩擦、传动间隙、结构弹性变形等。 第53页/共89页5. 机械结构因素对伺服系统性能的影响摩擦力矩-速度特性曲线一、摩擦的非线形特性摩擦sT起始点为静摩擦力矩 ;低速时为边界和混合摩擦状态,动摩擦力矩 随速度的增加而降低;当速度加大到动压效应处于流体摩擦状态时,粘滞摩擦力矩 随速度的增加而增大。因此在静止及低速时,摩擦力矩的变化是非线性。sTcTVT第54页/共89页5.机械结构因素对伺服系统性能的影响二、摩擦引起的伺服系统误差静摩擦力矩Ts产生的误差为:Rs
18、PATasKTKKKiRT0伺服系统刚度RKaPATLRRKKKiTK0摩擦第55页/共89页5.机械结构因素对伺服系统性能的影响设临界速度为vcmKFFVscsc4/)(JKTTstcc4/)( 不同的传动系统都有自己的临界速度。计算临界速度和临界角速度的估算公式:进给传动机构的力学模型摩擦主动件速度v1小于、大于临界速度vc时移动件速度v2的变化第56页/共89页5. 机械结构因素对伺服系统性能的影响摩擦四、改善低速爬行的措施第57页/共89页5. 机械结构因素对伺服系统性能的影响 间隙一、齿隙的滞环形非线性特性齿轮传动非线性关系 齿隙存在原因:齿轮在加工、装配和使用中各种误差因素的存在;
19、由于客观需要在相互啮合的两齿轮的非工作齿面之间留有一定的侧向间隙以储存润滑油,开补偿由于温度和弹性变形所引起的尺寸变化,避免齿轮卡死, 非线性关系产生的原因:齿隙的存在对于工作在可逆运转的传动装置就造成了空程误差(回差)。这样,传动装置的输出轴与输入轴之间的关系就不是单值的线性关系,而是具有滞环形的非单值的非线性关系。 第58页/共89页5.机械结构因素对伺服系统性能的影响二、齿隙对伺服系统性能的影响G2、G4: 动力驱动 G1、G3 :数据传递由于它们在系统中的位置不同,其齿隙对伺服性能的影响也是各不相同的。齿隙会影响系统的伺服精度,还要影响系统的稳定性。 间隙第59页/共89页5.机械结构
20、因素对伺服系统性能的影响二、齿隙对伺服系统性能的影响 间隙第60页/共89页5.机械结构因素对伺服系统性能的影响二、齿隙对伺服系统性能的影响 间隙3. 闭环内反馈数据通道中齿轮传动装置G3 对伺服稳定性、伺服精度都有影响 4. 闭环外反馈后输出通道上的齿轮传动装置G4 (同G1)影响伺服稳定性,不影响系统精度第61页/共89页5.机械结构因素对伺服系统性能的影响三、减弱或消除齿隙的若干措施 间隙第62页/共89页5.机械结构因素对伺服系统性能的影响三、减弱或消除齿隙的若干措施 间隙偏心轴套式消除间隙结构1一偏心环 2一电液脉冲马达圆柱薄片齿轮周向弹簧错齿调接法1一弹簧 2一短柱 3、4一齿轮
21、圆柱薄片齿轮可调拉簧错齿调整法1、6、7凸耳 2一弹簧 3、4 螺母 5螺钉 8、9一薄片齿轮 第63页/共89页5.机械结构因素对伺服系统性能的影响三、减弱或消除齿隙的若干措施 间隙斜齿薄片齿轮轴向压簧错齿调整法1、2一薄片齿轮 3一弹簧 4一键 5一螺母 6一轴 7一宽齿轮 齿轮齿条传动的齿侧隙消除法1、6一小齿轮 2、5一大齿轮 3一齿轮 4一预载力装置 7 齿条 第64页/共89页5.机械结构因素对伺服系统性能的影响双传动链摩擦阻尼消隙法 间隙2. 从机械设计角度来考虑 提高精度和采用各种消隙措施(在 末级啮合副上采用消隙的效果十分显著) 采用两个完全相同的传动链,伺服电动机驱动两个转
22、向相反的输入齿轮,这两个齿轮分别安装在两个离合器的输入轴上,每个离合器与一套轮系相连,两套轮系最后都输出到大齿轮上。如果将一个离合器接通,另一个离合器脱开,与接通的离合器相连的一套轮系就驱动大齿轮转动。与此同时,输出轴上的大齿轮又倒拖着第二套轮系。当第二个离合器接通,第一个离合器脱开时,就产生反向转动。在这种轮系驱动中,另一套轮系总将其齿轮与轴承上的摩擦阻尼力施加在大齿轮上,这是一个较大的阻尼力矩,以此达到消隙的目的 。第65页/共89页5.机械结构因素对伺服系统性能的影响结构弹性变形 单质量扭振系统KJB2一、单质量扭振固有频率 当伺服电动机带动机械负载按指令运动时,机械系统所有传动轴(包括
23、电动机轴在内)、轴上的齿轮、联轴器、箱体和基座等,均将产生程度不等的弹性变形,其变形量及固有频率通过计算可求得。根据机械结构在伺服系统中的位置不同,对伺服精度和系统稳定性的影响也是不同的。 lJGK/JK /扭振固有频率:l 轴长度 材料剪切弹性模量 G轴截面积惯性矩 J第66页/共89页二、伺服电动机机械系统固有频率5.机械结构因素对伺服系统性能的影响结构弹性变形等效系统的转换:电动机惯量Jm、阻尼系数Bm;负载惯量JL、阻尼系数BL ;齿轮传动比 I = Z2/Z1;轴1的刚度K1,轴2的刚度K2。假设齿轮是刚性的,惯量和齿隙为零。第一步:将挠性轴2转换成绝对刚性轴,并用改变轴1的刚度来等
24、效原系统。在惯量Jm处的总偏转角为:22122111iKKTKTiKTmmm221111iKKKe对于轴1,系统的等效刚度Ke为第67页/共89页二、伺服电动机机械系统固有频率5.机械结构因素对伺服系统性能的影响结构弹性变形第二步:将轴2的负载惯量、阻尼系数折算到轴1上。2LLLLTJB111eeTJB11121222,TiTi2iJJLe2iBBLe12121 iBiJTLL第68页/共89页二、伺服电动机机械系统固有频率5.机械结构因素对伺服系统性能的影响结构弹性变形2iJJLe2iBBLe负载的简化模型第69页/共89页二、伺服电动机机械系统固有频率5.机械结构因素对伺服系统性能的影响结
25、构弹性变形22111232211112eKKZZtKKZZ2211123222eZZtBBBCZZ2211123222eZZtJJJmZZ电动机驱动的移动机械系统第70页/共89页伺服电动机机械系统的固有频率:)/(emenJJKeLb/60max5.机械结构因素对伺服系统性能的影响)(2/ )(emeemJJKBB阻尼比:bn5工程实际中,为避免结构弹性变形引起伺服系统谐振应有:结构弹性变形负载最大角加速度( ) maxL2/1 s伺服精度() e第71页/共89页1. 提高结构固有频率(1)提高结构刚度。采用弹性模量、切变模量较高的材料,合理选择构件截面几何形状和尺寸均可提高零件刚度。还要
26、注意薄弱环节的刚度,如轴承、滚珠丝杠要预紧,联轴器要消隙,与支承面安装接触处要提高表面粗糙度等来提高刚度。对固有频率影响大的环节要特别注意,如尽量提高靠近负载处的结构刚度,因为折算到电动机轴上的等效刚度的传动比最大。采用大扭矩电动机直接驱动,由于取消了扭转刚度薄弱的齿轮减速装置,可显著提高结构刚度。 (2)减小惯量2. 增加阻尼,抑制谐振 结构阻尼一般有接合面之间的摩擦阻尼和结构材料的内摩擦阻尼两种。通常螺栓联结的结构阻尼比焊接结构大,间断焊缝的阻尼比连续焊缝大。灰铸铁由于石墨的吸振作用,阻尼系数远大于钢。对于弯曲振动的构件,可在其表面喷涂一层高内阻尼的粘滞弹性材料(如沥青基制成的胶泥减振剂、
27、高分子聚合物等),涂层厚度愈大,阻尼愈大。 5.机械结构因素对伺服系统性能的影响三、解决结构谐振问题的主要措施结构弹性变形第72页/共89页5.机械结构因素对伺服系统性能的影响惯量n惯量对伺服性能的影响表现为以下几方面:(1)惯量大, 值将减小,从而使系统的振荡倾向增强,降低了稳定性;(2)惯量大, 值将减小,从而使伺服系统带变小,限制了系统响应能力,使快速性和精度降低;(3)惯量适当增大仅在改善低速爬行时有利 对待惯量,一般情况下应尽可能使其减小。可以从结构、材料等方面着手。第73页/共89页一、带有传动机构的负载转矩的折算 在从电动机到负载的功率传递过程中,依靠机械传动装置进行转矩和转速的
28、匹配。53 机电部件的静态匹配电机及负载的转矩特性负载转矩:工作负载转矩(如切削力矩、空气阻力矩等) 、摩擦力矩和惯量转矩(动态转矩)电动机要克服的负载转矩: 1. 峰值转矩:当各种负载为非随机性负载,则将各负载的峰值取代数和,称为峰值转矩,对应于电动机最严重的工作情况。2. 均方根转矩 当各种负载为随机性负载,则取各负载的方根和,称为均方根转矩,对应于电动机长期连续地在变载荷下工作的情况。第74页/共89页峰值转矩折算: 折算到电机轴上的负载峰值转矩为2()LmLPF PmG mtLPLPtttTTJTJJiiii电机及负载的转矩特性53 机电部件的静态匹配一、带有传动机构的负载转矩的折算作
29、用在负载轴上的各种峰值工作转矩LPT作用在负载轴上的峰值摩擦转矩FPT传动装置的总传动比timJ电动机转子的转动惯量mJ传动装置的效率 传动装置各转、移动零件折算到电动机轴上的转动惯量GmJ负载轴上的转动惯量LJ负载轴上的峰值角加速度LP第75页/共89页均方根转矩折算折算到电动机轴上的负载均方根转矩为 2222()()()mLrLrfrLmGmtLrtttTTJTJJiiii 作用在负载轴上的均方根工作转矩、均方根摩擦转矩frLrTT、负载的转距特性531 电机及负载的转矩特性53 机电部件的静态匹配一、带有传动机构的负载转矩的折算Lr负载轴上的均方根角加速度第76页/共89页二、伺服电动机的转矩特性m- abTbTmssmeaaUKKKKTTTURR由于总传动比 ,前式可改写为/tmLi 电机及负载的转矩特性5.3 机电部件的静态匹配1、直流伺服电动机的转矩特性LtMTbsmiRKKTT为信号系数 eaUU1为 时电动机的起动转矩(堵转转矩) 1sT电动机的控制电压、额定电压 eUaULrLr电动机的反电势常数、转矩常数、电枢绕组的电阻 aTbRKK、直
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 广西高一文科数学试卷
- 市场监管养老诈骗课件
- 工程问题复习课件
- 疫情家长会总结课件下载
- 企业培训行企业线上学习平台开发及应用推广
- 动物语言翻译机500字10篇
- 疫情下口腔门店管理课件
- 嘉兴中考押题数学试卷
- 黄冈英山期末数学试卷
- 嘉兴六年级期中数学试卷
- 广元城市IP打造营销规划方案
- 钢结构安装安全操作规程
- 2025年项目管理专业资格考试试题及答案
- 选修课调酒的考试题及答案
- 2026版高三一轮总复习(数学)第二章 第2课时 函数的单调性与最值 课件
- 房屋租用合同4篇
- 非公企业党建培训课件
- 湖南省乡镇卫生院街道社区卫生服务中心地址医疗机构名单目录
- ADC12物料安全资料表MSDS
- 信息系统实施前现状和需求调研方案提纲共享
- 潜能生转化情况记录表(共4页)
评论
0/150
提交评论