



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
热点03无人驾驶与电动汽车
近年来,我国无人驾驶与电动汽车迅速发展,在与生活、生产、科技结合的情境中,经常考察牛顿运动
定律、还常与功和能、电场和磁场等知识综合进行考查。
(建议用时:40分钟)
考点01
牛顿运动定律
1.传统车辆刹车时使用机械制动方式,利用刹车装置使车辆受到制动力(即阻力)而减速,将减小的动
能全部转化成内能。有些新能源电动车刹车时会使用一种"再生制动"方式,该方式在制动时能将汽车减
少的动能转化为电能加以储存利用,这些减少的动能也被称为可回收的动能。
一辆质量为〃?的电动汽车在平直路面上行驶,某一时刻同时开启机械制动和再生制动,汽车的速度从
匕减为马的过程,位移大小为占;此后,只开启机械制动,直至汽车停止,汽车又向前行驶的位移大
小为迎。假设机械制动使汽车受到的制动力恒定,空气阻力不计。
(1)求只开启机械制动的过程,汽车受到的制动力大小/;
(2)求同时开启机械制动和再生制动的过程,汽车可回收的动能品。
(3)从物体的运动情况确定其受力特征是力学研究的一个重要思路。为检测再生制动的性能,在汽车
速度为%时,研究人员只开启再生制动方式,测绘了汽车速度随位移变化的关系图线如图所示,图线
是一条直线,其斜率的绝对值为鼠根据加速度的定义,结合图像,推导汽车加速度a随v变化的规律
及受到的制动力/随v变化的规律。
F=—mkv
【详解】(1)使用机械制动方式刹车时,根据动能定理
-A=°-1WV22
得
f笄
2X2
(2)同时开启机械制动和再生制动,根据能量转化和守恒定律
g加匕2_g加匕2=£回+笈]
得
『1212(」国)
埼=彳机匕一彳机"2]+一
22x2)
(3)根据加速度的定义。=半,由图线可知
△t
v=v^-kx
则
Av=-k\x
将。=券代入上式得
\t
a\t=-kAx
Av
又将瞬时速度计算式V=当代入上式得
A/
a=-kv
根据牛顿第二定律可知,刹车过程的制动力
F=ma=-mkv
2.某智能电动汽车质量为2000kg,可通过电机进行驱动和制动。在驱动模式下,由动力电池向轮毂内的
电机供电,从而驱动电机转动;其制动模式有两种,一种是“动力回馈”模式,由车轮带动电机内线圈转
动,向动力电池反向充电。该模式下仅线圈提供的阻力为车重的0.3倍,同时汽车行驶过程中始终受
到一个外界施加的阻力,大小恒为0.1倍车重。第二种模式为刹车制动模式,该模式下不进行"动力
回馈",行车电脑控制汽车减速的加速度大小恒为8m/s2。在某段直线行驶过程中,该智能电动汽车正
以108km/h的速度匀速行驶,毫米波雷达发现正前方55m处有一匀速行驶的汽车,速度为36km/h,
辅助驾驶系统立刻先通过"动力回馈"模式制动,中途某处,启动刹车制动,恰好在距离前车6m处将车
速减至36km/h,实现跟车匀速行驶。求:
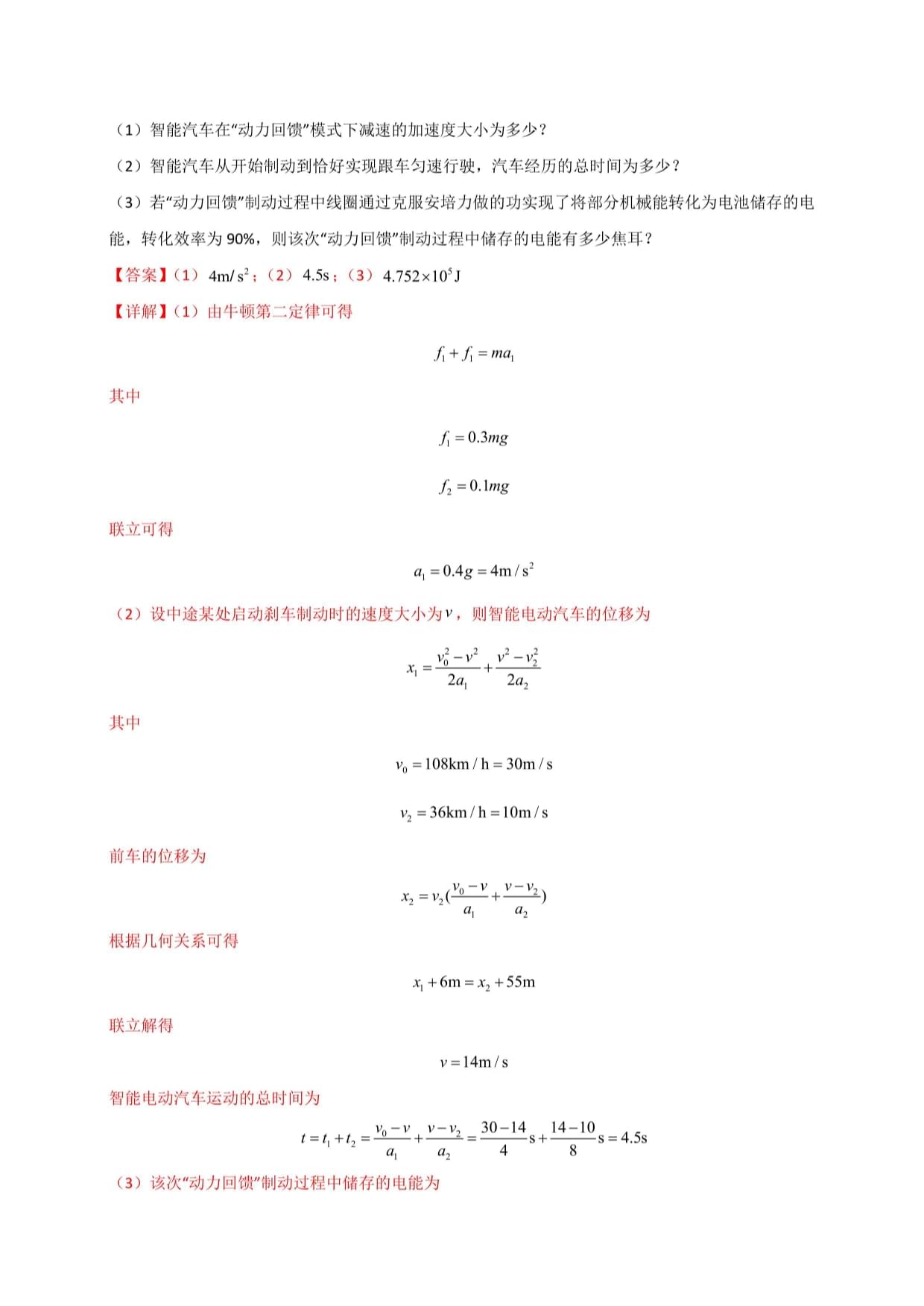
(1)智能汽车在"动力回馈"模式下减速的加速度大小为多少?
(2)智能汽车从开始制动到恰好实现跟车匀速行驶,汽车经历的总时间为多少?
(3)若"动力回馈"制动过程中线圈通过克服安培力做的功实现了将部分机械能转化为电池储存的电
能,转化效率为90%,则该次“动力回馈”制动过程中储存的电能有多少焦耳?
【答案】(1)4m/s2;(2)4.5s;(3)4.752x10”
【详解】(1)由牛顿第二定律可得
f1+fl=ma1
其中
fi=0.3mg
f2=o.i«?g
联立可得
%=0.4g=4m/s2
(2)设中途某处启动刹车制动时的速度大小为v,则智能电动汽车的位移为
其中
v0=108km/h=30m/s
v2=36km/h=10m/s
前车的位移为
,v-vv-v.
^2=V2(-0-+——2
CL]
根据几何关系可得
xx+6m=x2+55m
联立解得
v=14m/s
智能电动汽车运动的总时间为
v0-vv-v230-1414-10人仁
t=tx+t2=--------1--------=---------sH-----------s=4.5s
a248
(3)该次"动力回馈"制动过程中储存的电能为
302-142
E=%x90%=0.3机gS]x90%=0.3x2000xlOx-----------x0.9J=4.752x10$j
2x4
3.新能源汽车,是指采用新型动力系统,完全或者主要依靠新型能源驱动的汽车,包括插电式混合动力
(含增程式)汽车、纯电动汽车和燃料电池汽车等。新能源汽车在设计阶段要对各项性能进行测试。
某次新能源汽车性能测试中,如图甲显示的是牵引力传感器传回的实时数据,但由于机械故障,速度
传感器只传回了第25s以后的数据,如图乙所示。已知汽车质量为1500kg,若测试平台是水平的,且
汽车由静止开始做直线运动,所受阻力恒定。求:
(1)18s末汽车的速度是多少?
(2)前25s内汽车的位移是多少?
fF/(xlO3N)Mv/(m-s-1)
9—;
।
।
।
।
1.5-J--------------
1卜11”'r
061830t/s025
甲乙
【答案】(1)26m/s;(2)608m
【详解】(1)由题图甲知18s后汽车受到的牵引力恒定,又汽车受到的阻力始终恒定,故18s后汽车受
到的合力恒定,汽车做匀加速运动或匀速运动,由题图乙可知,18s后汽车做匀速运动,此时牵引力为
3
F3=1.5X10N
以牵引力方向为正方向,由平衡条件知,阻力为
3
/=-F5=-1.5X10N
。〜6s内,牵引力为
尸/=9xl03N
由牛顿第二定律得
F]~\~f—mai
代入数据解得
6Z7=5m/s2
6s末汽车的速度为
v/=〃//=30m/s
在6〜18s内,牵引力为
3
F2=1X10N
由牛顿第二定律得
F2~\~f=ma2
解得
ci]———m/s-
18s末汽车的速度为
V2=v/+a2f2=26m/s
(2)汽车在0〜6s内的位移为
X]=90m
在6〜18s内的位移为
匕+匕-t=336m
22
在18~25s内的位移为
工3="2打=182m
故汽车前25s内的位移为
x=x/+x2+x3=608m
4.随着科技的发展,汽车无人驾驶技术日益成熟。某自动配送小型无人驾驶货车质量为400kg,额定功率
为18kW。某次试运行测试时,进行了如下操作:
(1)货车由静止启动做匀加速直线运动,3s内前进了4.5m,求3s末速度的大小;
(2)在进行货车避障能力测试时,该车以10m/s速度匀速行驶,正前方11m处突然出现障碍物,从探
测到障碍物到作出有效操作的时间为0.1s,则该车至少应以多大的加速度刹车才能避免碰撞?
(3)该货车在平直道路行驶,所受阻力为其重力的0.1倍,某时刻输出功率为6kW,速度大小为
5m/s,重力加速度g取lOm/s。,求此时货车加速度的大小。
22
【答案】(1)3m/s;(2)a2=5m/s;(3)a3=2m/s
【详解】(1)由
x-乜
「2%
可得3s末速度的大小
匕=3m/s
(2)设最小加速度大小为勿,由题意可得
代值求得刹车的加速度最小为
2
a2=5m/s
(3)由
P=FV3
可得速度大小为5m/s时的牵引力为
尸=1200N
由牛顿第二定律
F-0.Img=ma3
可得此时货车加速度的大小
a3=2mzs2
5.社会发展,交通事故日益增多,无人驾驶技术的发展有望解决这一问题;若一辆总质量为”的公交车
与一辆总质量为加的轿车在一条直道上匀速相向行驶,因驾驶员注意力分散致使两车突然发生正碰并
且同时停下来,从发生碰撞到停下所经历的时间为△/.
(1)求两车碰撞前的速度大小之比;
(1)若公交车驾驶员的质量为“。,发生事故前瞬间公交车的速率为V。,因驾驶员系了安全带在事故过
程中驾驶员没有受伤,求在此过程中,驾驶员受到安全带作用力的平均值;
(3)若两车在行驶时,驾驶员同时踩下刹车,刹车后车轮不再转动,两车均做匀变速直线运动,恰好在
接触前瞬间停下,两车在刹车过程中行驶的距离相等,求公交车和轿车的车轮与地面间的动摩擦因数
之比。
【答案】(1)—(2)如(3)-4
MAtM
【详解】(1)两车碰撞时动量守恒,则由动量守恒定律:
mv{-MV2=0
则
匕M
(2)对公交司机,根据动量定理:
FA?=0-movo
则
F=_*
Ar
方向与初速度方向相反。
(3)刹车过程
v2V2
X=—=----
2a2〃g
刹车过程两车位移相等,则〃8/
则
从_病
4M2
6.2020年9月15日,百度联手央视新闻全程直播“万物智能一百度世界2020"大会。大会上介绍了无人
驾驶技术的商业前景,并且将加速中国自动驾驶大规模商业化部署,不久的将来将有无人驾驶车辆驰
聘在大街小巷。无人驾驶车辆通过多种传感器检测路况环境,确保行驶安全。某测试车质量为加=5/,
沿一足够长、倾角0=37。的直斜坡公路以匕=36km/h的速度匀速下坡,传感器检测发现车头正前方
%=15m处有一骑行者正以匕=18km/h的速度匀速下坡,测试车立即启动刹车系统做匀减速运动。
问:
(1)为了不撞上骑行者,测试车刹车时加速度。的大小至少为多少?
(2)为了确保行车安全,无人驾驶车辆设计时考虑了多种可能性。若测试车下坡刹车时车轮被抱死,
测试车恰好不能撞到骑行者,则测试车车头距离骑行者多远时开始刹车?(已知测试车轮胎与路面间
的动摩擦因数为〃=0.8,sin37°=0.6,cos37°=0.8,重力加速度gnlOm/s?)
【答案】(1)fm/s2;(2)31.25m
【详解】(1)已知
匕=36km/h=1Om/s
v2=18km/h=5m/s
设测试车减速时的加速度大小为a时恰好没有撞到骑行者,经时间4两者速度相等,则有
匕-atx=v2
&+旷2尤
-V2%=%
代入数据解得
a=m/s2
6
(2)测试车车轮抱死时,测试车滑动摩擦力大小为
f=/Jingcos3
对测试车根据牛顿第二定律得
mgsind-f=ma
联立解得
a=-0.4m/s2
设测试车经过时间才2与骑行者共速,由运动学公式有
a
测试车刹车时与骑行者间的距离
72t2
代入数据解得
Ax=31.25m
曲线运动
7.无人机快递(UAVExpress),即通过利用无线电遥控设备和自备的程序控制装置操纵的无人驾驶的低空
飞行器运载包裹,自动送达目的地,其优点主要在于解决偏远地区的配送问题,提高配送效率,同时
减少人力成本。缺点主要在于恶劣天气下无人机会送货无力,在飞行过程中,无法避免人为破坏等。
顺丰快递己有,但未大范围使用。如图,无人机以%=2m/s的速度水平向右匀速飞行,在某时刻释放
了一个质量为1kg的小球,释放后无人机飞行速度不变。经过2s后小球落地,空气阻力忽略不计,g
取lOm/s?。
(1)求小球释放点与落地点之间的水平距离;
(2)求小球落地时,重力的瞬时功率;
(3)求小球落地时,小球和无人机之间的距离。
【答案】(1)4m;(2)200W;(3)20m
【详解】(1)小球释放后做平抛运动,则有
西=vot
解得
X[=4m
(2)小球落地竖直分速度为
%=g,
球落地时,重力的瞬时功率
P=mgvy
解得
P=200W
(3)小球水平方向做匀速直线运动,分速度大小与无人机相等,则小球落地时,小球和无人机之间的
距离为
人=;g/
解得
h=20m
8.电动汽车如今渐渐成为道路上主流,为了测试某一电动汽车性能,在一个封闭测试场进行了测试,如
图,测试长上坡路段为一段倾斜角0=37。的斜面斜面与弧面8c相切于8点。质量为
加=2560kg的汽车从斜面底部/点由静止开始沿着斜面45启动。已知汽车受到斜面的阻力与车对斜
面的压力的比值为〃=0.25。汽车在斜面上先做加速度为2m/Sz的匀加速直线运动,12s时汽车达
到额定功率,随后汽车保持额定功率继续运动,汽车到达8点前已经达到最大速度%…到达3点
后,立即关闭发动机,汽车继续沿着圆弧向上滑行,圆弧路面阻力较小,忽略不计,不计空气阻力,
已知g=10m/s?,sin37°=0.6,cos37°=0.8,汽车可视作质点。求:
(1)汽车匀加速直线运动过程中的最大速度匕及牵引力尸;
⑵汽车在斜面AB上能到达的最大速度%以;
⑶若弧面半径可调,且汽车沿弧面8c运动过程中不脱离弧面,则汽车通过最高点C的最大速度(结
果用根式表示)。
【答案】(l)24m/s,2.56X104N
(2)30m/s
(3)3V50m/s
【详解】(1)汽车匀加速直线运动过程中的最大速度
%=atl2=2xl2m/s-24m/s
汽车受到的阻力为
f=/jmgcos6=5120N
根据牛顿第二定律
F-f-mgsind=ma
解得牵引力
F=2.56X104N
(2)汽车额定功率为
==2.56X104X24W=6.144X105W
汽车在斜面AB上能到达的最大速度
(3)若汽车在B点不脱离弧面,根据牛顿第二定律,在3点应满足
<mgCOS31°
解得圆弧半径区的取值范围为
7?>112,5m
若汽车能够沿弧面8C通过最高点C,根据动能定理有
-mgR^l-cos^)=一;加vm;ax
在最高点C,根据牛顿第二定律
mg-F=m
NR
且
0<F^<mg
解得圆弧半径R的取值范围为
竺WR<225m
7
综合上述可得圆弧半径R的取值范围为
112.5m<7?<225m
当及取112.5m时,汽车在C点速度最大,代入
-mgR(l-cos3)=
可得
vCm=3y[50m/s
9.电动汽车BEV是指以车载电源为动力,用电机驱动车轮行驶,符合道路交通安全法规各项要求的车
辆。某汽车厂家设计一款小型电动汽车,其额定功率为21肌T、质量700kg,出厂之前要进行一系列的
车辆动力性能和安全性能的测试。
(1)当此电动汽车在平直道路上测试时受到恒为车重0.1倍的阻力,求汽车在平直道路上的最大速度
(g=10m/s2);
(2)当此电动汽车在水平弯道上测试时,已知轮胎与地面的动摩擦因数为0.25,弯道的半径为
160m,最大静摩擦力等于滑动摩擦力,求汽车通过水平弯道的最大安全速度(g=10m/s2)。
【答案】(1)30m/s;(2);20m/s
【详解】(1)当汽车的牵引力等于阻力时,汽车的速度达到最大,即可得汽车在平直道路上的最大速
度为
£=21000=30m/s
根f700
(2)由摩擦力提供向心力,即有
v2
jumg-m——
''r
代入数据解得
v==20m/s
考点03
功和能
10.一辆国产"无人驾驶”电动汽车在平直公路上行驶,它由静止开始启动后汽车电脑系统收集到的汽车所
受牵引力厂和汽车速度!倒数关系如图所示,已知汽车行驶过程中所受阻力恒定,且为车重的左倍,
V
k=0A,g=10m/s2,没汽车最大车速为30m/s,则汽车的速度大小为12m/s时,汽车的加速度大小为
A.0.9m/s2B.lm/s2
【答案】D
【详解】当牵引力等于阻力时,速度最大,由题最大速度为30m/s,则
F=0.1mg=2xl03N
解得
m=2xl03kg
最大功率为
P=FV=2X103X30W=6X104W
由图可知,尸-■图线的斜率为功率,所以汽车先匀加速达到最大功率后以恒定功率加速,匀加速的
V
最大速度
P6xl04,,八,,
v,=——=--------m/s=10m/s<12m/s
13
F{6xl0
汽车的速度大小为%=12m/s时,汽车的牵引力为
6x143
F2=—=°N=5X10N
2
v212
根据牛顿第二定律
F2-O.lmg=ma2
解得
2
a2=1.5m/s
故选D。
11.我国在人工智能和无人驾驶技术方面已取得较大突破。为早日实现无人驾驶,某公司对汽车性能进行
了一项测试,让质量为加的汽车沿一山坡直线行驶。测试中发现,下坡时若只关掉油门,则汽车的速
度保持不变;若以恒定的功率尸上坡,则从静止启动做加速运动,发生位移x时速度刚好达到最大值
%,假设汽车在上坡和下坡过程中所受路面阻力大小恒定且相等,山坡的倾角为凡忽略空气阻力的
影响,下列说法正确的是()
A.关掉油门后的下坡过程,坡面对汽车的支持力等于加gsin。
P
B.路面对汽车的阻力大小为一
%
C.上坡过程中,汽车从静止启动到速度刚好增至%,所用时间为4"'gxsin-+加%2
2P
一2x
D.上坡过程中,汽车从静止启动到速度刚好增至%,所用时间等于一
【答案】C
【详解】A.关掉油门下坡的过程,汽车所受支持力
心=mgcos0
故A错误;
B.关闭油门汽车下坡时速度不变,则
f=mgsin0
上坡达到最大速度时,牵引力与重力沿坡面的分力和阻力的合力平衡,则有
P
mgsin0+f=—
%
故B错误;
C.上坡过程中,汽车从静止启动到速度刚好增至%,由动能定理
12
Pt-(mgsin0+f)x=—mvm-0
得至!J
4mgx•sin6+mv^
t-
2P
故c正确;
D.上坡过程中,汽车做加速度减小的加速运动,平均速度大于所以运动时间
x2x
t=—<—
V%
故D错误。
故选C。
12.为了测试某新能源汽车的性能,无人驾驶的新能源汽车在封闭的平直测试路段从静止开始运动,该汽
车的速度v与时间/的关系图像如图所示,0~10s对应的图线为过原点的直线,10s时汽车的功率恰好
达到额定功率,之后维持额定功率不变。已知该汽车的质量为2000kg,汽车在测试路段运动时受到的
阻力大小恒为汽车重力的1,取重力加速度大小g=10m/s2。下列说法正确的是()
A.该汽车的额定功率为g.OxIO'W
B.5s末该汽车的牵引力大小为8X1()3N
C.该次测试中汽车的最大速度为30m/s
D.4~4+10s内汽车行驶的路程为600m
【答案】B
【详解】AB.0~10s对应的图线为过原点的直线,所以汽车在这一阶段恒定加速启动,根据牛顿第二
定律可知
F-f=ma
"包=2m/s2
AZ
汽车受到的牵引力不变,即
F=8000N
所以,5s末该汽车的牵引力大小为8X103N。结合功率的公式
P=Fv
可知,当汽车的牵引力不变时,速度增大,汽车的功率增大,当速度最大时,汽车的功率达到额定功
率,即
v=20m/s
则汽车的额定功率为
=FV=8000X20W=1.6X105W
A错误,B正确;
C.10~%时间内,汽车以恒定功率启动,根据
P=Fv
解得
F=—
V
随着车速逐渐增大,牵引力逐渐减小,汽车的加速度越来越小据牛顿第二定律可知
F-f=ma
当加速度为零时,汽车的速度最大,此时
尸=/=;mg=4000N
故最大车速为
v=邑=区=L6xl°5m/s=40m/s
mFf4000
C错误;
D.%~%+10s时间内,根据动能定理可知
Pt-fs=O
解得
s=400m
D错误。
故选Bo
13.如图,无人驾驶小车在水平MN段以恒定功率200W、速度5m/s匀速行驶,在斜坡PQ段以恒定功率
580W、速度2m/s匀速行驶。已知小车的质量为50kg,MN=PQ=20m,P0段的倾角为30。,重力
加速度g取lOm/sz,不计空气阻力。下列说法正确的是()
B.从〃■到N,小车克服阻力做功800J
C.从尸到0,小车重力势能增加1x1(/j
D.从P到。,小车克服阻力做功800J
【答案】ABD
【详解】A.小车从"到N,依题意有
7
Px=7Vl=200W
代入数据解得
方=40N
故A正确;
B.依题意,小车从初到N,因匀速,小车所受的摩擦力大小为
工=F=40N
则摩擦力做功为
%=_<而=_800J
则小车克服摩擦力做功为800J,故B正确;
C.依题意,从尸到Q,重力势能增加量为
AEp=mgPQsin30°=5000J
故C错误;
D.依题意,小车从尸到。,摩擦力为力,有
f2+/ngsin30°=-
V2
摩擦力做功为
%2=-力而=800J
故D正确。
故选ABD。
14.如图所示,载有防疫物资的无人驾驶小车,从“点以恒定功率300W启动,经过15s到达N点,此时
速度10m/s,此后以恒定速率运动到P点,小车从尸点到。点克服摩擦力做功2000J,在未到达。点
之前关闭发动机,最终恰好停在。点。已知小车总质量为20kg,MN=PQ=20m,尸。段的倾角为
30°,重力加速度g取10m/s2,不计空气阻力。下列说法正确的有()
B.从/到N,小车受到的摩擦力大小为175N
C.从尸到0,小车重力势能增加4000J
D.从P到。,小车发动机做功3000J
【答案】BD
【详解】A.从M到N,小车所受摩擦力大小不变,功率恒定,随速度增加,牵引力减小,小车所受
合外力减小,不是做匀加速运动,故A错误;
B.从M到N,由能量守恒定律可得
2
Pt=^mv+fsMN
解得
/=175N
故B正确;
C.从尸到。,小车重力势能增加
△Ep=sin30°mg/zPe=2000J
故C错误;
D.从尸到Q,由动能定理可得
1,
2
W-W{-WG=0--mv
解得小车发动机做功
W=3000J
故D正确。
故选BD。
15.如图,载有防疫物资的无人驾驶小车,在斜坡段以恒定功率100W、速度2m/s匀速行驶,在水平
尸。段以恒定功率3200W、速度8m/s匀速行驶,已如小车总质量为50kg,其中MN段的倾角为30。,
儿W长度A=20m,重力加速度g取10m/s,,不计空气阻力,求:
(1)水平段从尸到。,小车牵引力巴的大小;
(2)倾斜段从M到N,小车克服摩擦力做功/-
【答案】(1)400N;(2)6000J
【详解】(1)在水平尸。段以恒定功率3200W、速度8m/s匀速行驶,则有
P1=F2V2
解得
F2=400N
(2)倾斜段从M到N,根据动能定理有
FJ+mgLsin30°-=0
由于在斜坡MN段以恒定功率100W、速度2m/s匀速行驶,则有
片=耳匕
解得
W克f=6000J
考点04
电磁学
15.(24-25高三上•天津南开•期末)电动汽车制动时可利用车轮转动将其动能转换成电能储存起来。制动
时车轮转动带动磁极绕固定的线圈旋转,在线圈中产生交变电流。若"0时磁场方向恰与线圈平面垂
直,磁极位置如图甲所示,磁极匀速转动,线圈中的电动势随时间变化的关系如图乙所示。将两磁极
间的磁场近似视为匀强磁场,下列说法正确的是()
A.f=0时线圈中磁通量为0,磁通量变化率最大
B."时线圈中电流方向由P指向0
C.。〜4过程,线圈中的平均感应电动势大小为当
71
D.线圈中的电动势瞬时值表达式为e=&cos(第J
【答案】C
【详解】A.1=0时线圈中磁通量最大,磁通量变化率为零,选项A错误;
B.根据右手定则,t=4时线圈中电流方向由。指向P,选项B错误;
C.0〜4过程,线圈中的平均感应电动势大小为
厂A①BS2nBs①2M
At12^兀兀
4co
选项C正确;
D.线圈中的电动势瞬时值表达式为
2兀
e=Esin((y/)=Esin
mmT
选项D错误。
故选Co
16.(24-25高二上•湖南长沙•阶段练习)锂离子电池已被广泛地用于智能手机、智能机器人、电动自行
车、电动汽车等领域,锂离子电池主要依靠锂离子(Li+)在电池内部正极和负极之间移动来工作,某
款手机充电锂离子电池的标识如图所示。下列说法正确的是()
锂离子电池BLP565
标准电压:3.8V
电池容量:1900mAh
执行标准:GB/T18287-2013
A.该锂离子电池放电时,锂离子从正极运动到负极
B.该锂离子电池把化学能转化为电能的本领比电动势为1.5V的干电池弱
C.该锂离子电池充满电后可贮存约2.6xlO4J的电能
D.若该锂离子电池的待机电流为15mA,则其最长待机时间约为96h
【答案】C
【详解】A.锂离子电池放电时,在电池外部电流由正极流向负极,在电池内部,电流由负极流向正
极,锂离子带正电,在电池内部锂离子从负极运动到正极,故A错误;
B.电动势表示电池把其他能转化为电能本领大小的物理量,电动势越大,该项本领越大,所以3.8V
锂离子电池把化学能转化为电能的本领比电动势为1.5V的干电池强,故B错误;
C.该锂离子电池充满电后可贮存电能
E,=3.8Vxl900mAh=3.8xl900xl0-3x3600J~2.6xl04J
故C正确;
D.若该锂离子电池的待机电流为15mA,则其最长待机时间为
故D错误。
故选C。
17.(24-25高三上•重庆•开学考试)电动汽车充电站变压器如图所示,输入电压为10kV,输出电压为
220V,每个充电桩输入电流16A,设原副线圈匝数分别为多、%,输入正弦交流的频率为50Hz,则下
列说法正确的是()
A.交流电的周期为50s
B.原副线圈匝数比为:%=500:U
C.输出的最大电压为220V
D.若10台充电桩同时使用,输入功率为160kW
【答案】B
【详解】A.交流电的周期为
7=—=0.02s
f
故A错误;
B.根据理想变压器原副线圈的电压与线圈匝数的关系可得,原副线圈匝数比为
10x1000_500
nJUj22011
故B正确;
C.输出的最大电压为
%,=圆2=22°瓜
故C错误;
D.若10台充电桩同时使用,输出功率为
g总=10UJz=10x220xl6W=35200W=35.2kW
变压器不改变功率,故输入功率为
々总=1总=35.2kW
故D错误。
故选B。
18.(2024•黑龙江•模拟预测)电容储能已经在电动汽车、风力发电等方面得到广泛应用。某同学设计了图
甲所示电路,探究不同电压下电容器的充、放电过程和测定电容器的电容。器材如下:
电容器C(额定电压10V,电容标识不清);
电源£(电动势12V,内阻不计);滑动变阻器4(最大阻值20。);
电阻箱鸟(阻值0~9999.9。);电压表V(量程15V,内阻较大);
开关、S2,电流传感器,计算机,导线若干。
图丙
(1)按照图甲连接电路,闭合开关斯、断开开关S2,若要升高电容器充电电压,滑动变阻器A的滑片
应向端滑动(选填"。"或"6").
⑵当电压表的示数为5=3V时,调节冬的阻值,闭合开关S2,通过计算机得到电容器充电过程电流
随时间变化的图像;保持此的阻值不变,断开开关跖,得到电容器放电过程电流随时间变化的图像,
图像如图乙所示。测得,=6mA,则此=Qo
⑶重复上述实验,得到不同电压下电容器的充、放电过程的电流和时间的图像,利用面积法可以得到
【答案】(1)6
(2)500
⑶4.9x10-5
【详解】(1)闭合开关滑动变阻器是分压式接法,若要升高电容器充电电压,滑动变阻器片的滑
片应向6端滑动。
(2)由图乙可知,电容器开始放电电流是,=6mA,则开始充电瞬间电流是6mA,则充电瞬间,由
欧姆定律可得
R,=5~=500Q
2/1—6x1二0-3。=
(3)[1]由表中数据,在图丙中描点画U-。图像,如图所示。
⑵根据电容的定义式。=标,可得
则。图像的斜率
18
C0.39x10-3
电容器电容
C=^^F=4."
19.(23-24高三下•北京海淀•阶段练习)新型电动汽车在刹车时
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 2024年度黑龙江省高校教师资格证之高等教育法规题库检测试卷A卷附答案
- 山东省潍坊市2025届高三11月期中考试-数学试题(含答案)
- (高清版)DB12∕T 493-2018 地理标志产品 芦台春酒
- (高清版)DB12∕T 686-2016 规模化猪场环境监测技术规范
- 外卖调查报告5篇
- 2025年高校联合实验室共建合作协议
- 服装拍摄协议(2025年版)
- 2025年类合作协议改编授权协议
- 2025年银行容灾相关系统升级和改造收单项目开发协议
- 二零二五年度政府采购合同以物抵债协议法院监督
- 2024年河北省中考历史试题卷(含答案逐题解析)
- 《捐赠旧衣服》(课件)六年级下册劳动人教版
- 特别国债资金管理办法
- DL∕T 5776-2018 水平定向钻敷设电力管线技术规定
- 招投标代理公司内部监督管理制度
- 知识库管理规范大全
- 江苏省昆山、太仓、常熟、张家港市2023-2024学年下学期七年级数学期中试题
- 2024年天津市专业技术人员继续教育公需课考试题+答案 (四套全)
- “江格尔”的数字化保护与再生研究的开题报告
- 设计方案新能源汽车充电桩设计
- (高清版)DZT 0432-2023 煤炭与煤层气矿产综合勘查规范
评论
0/150
提交评论