


版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
智能循迹搬运机器人第1页/共15页智能循迹搬运机器人(又称AGV小车)以ARM新一代嵌入式并行读写操作部件为控制核心,实现对小车的智能控制。此控制系统不仅在机器人中有很强的使用价值,在汽车领域,智能家居等方面都有很高的是实用价值,尤其在智能机器人领域有很高发展前景。所以本设计与实际相联系,具有很重要的意义。本机器人是由上海未来伙伴公司提供新型机器人MF13以及我们的改造创新。
机器人小车最适合在那些人类无法工作的环境中工作和单一重复性的工作解决了人所不适应的生产和工作环境,在钢铁厂,AGV小车负责炉料运输,大大降低了工人们的劳动强度。在核电厂的核储存地点使用AGV小车,以避免辐射的危险。AGV小车可在黑暗环境中,准确、可靠的运输物料,在邮局,图书馆,码头和机场候机楼等人口密集的公众场所,存在着大量的物品的运送工作,充满不定性和动态性强的特点,搬运过程往往也很单一。AGV有着可并行工作、自动化、智能化和处理灵活的特点,可以很好的满足这些场合的运输要求,因此对机器人小车的研究和开发对未来的工业和社会具有十分重要的意义。
智能循迹搬运机器人研究目的及意义第2页/共15页
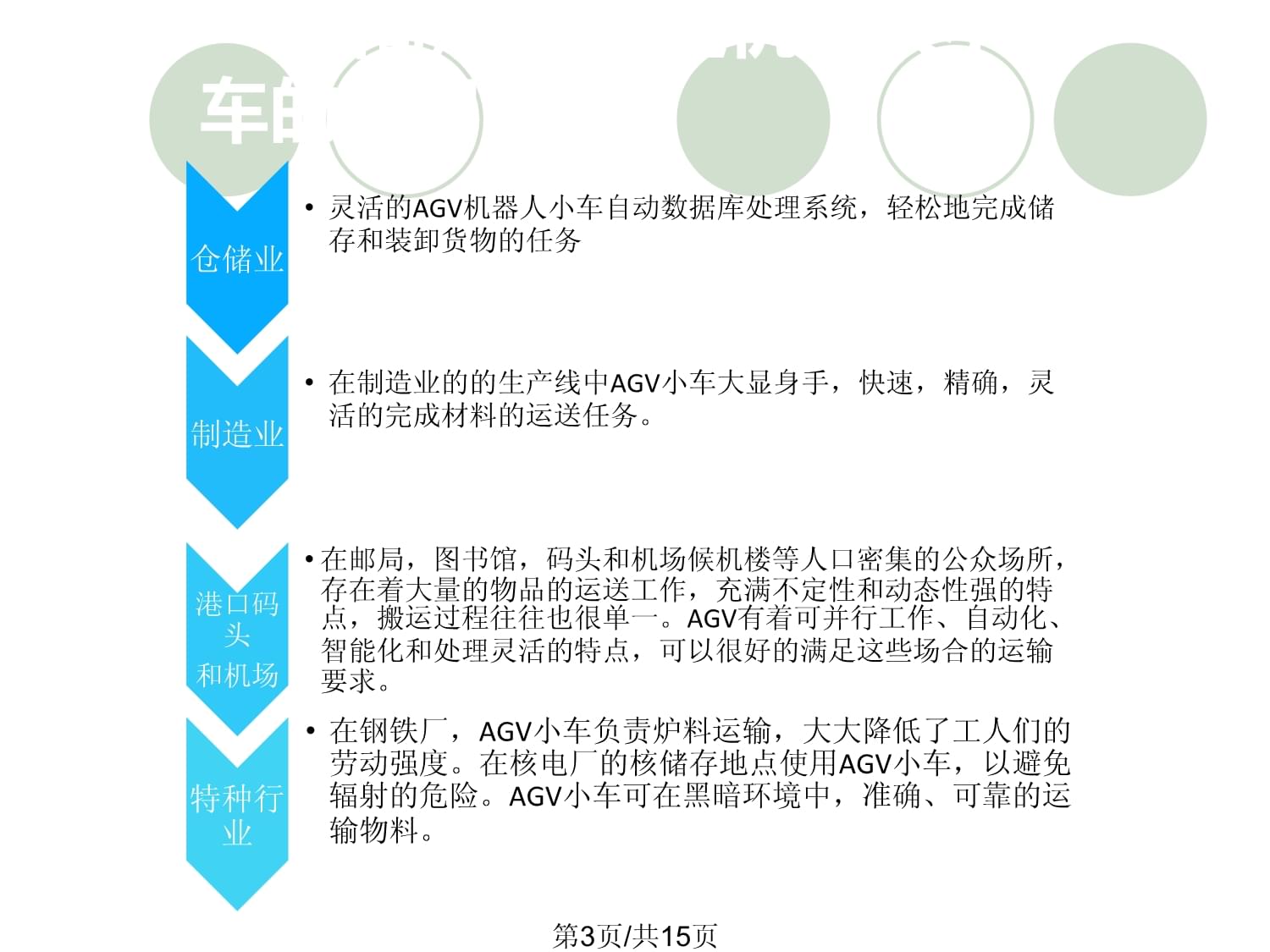
智能循迹搬运机器人小车的应用仓储业灵活的AGV机器人小车自动数据库处理系统,轻松地完成储存和装卸货物的任务制造业
在制造业的的生产线中AGV小车大显身手,快速,精确,灵活的完成材料的运送任务。港口码头和机场
在邮局,图书馆,码头和机场候机楼等人口密集的公众场所,存在着大量的物品的运送工作,充满不定性和动态性强的特点,搬运过程往往也很单一。AGV有着可并行工作、自动化、智能化和处理灵活的特点,可以很好的满足这些场合的运输要求。特种行业在钢铁厂,AGV小车负责炉料运输,大大降低了工人们的劳动强度。在核电厂的核储存地点使用AGV小车,以避免辐射的危险。AGV小车可在黑暗环境中,准确、可靠的运输物料。第3页/共15页机器人是基于极高性能的ARM12内核主控制器,拥有极高的运算速度(120Mhz),程序存储器容量大(1M),可同时可存储6个程序文件。内置无线模块,可无线下载程序。接口齐全,稳定可靠,体积小巧,省电节能。内置32位120MHz时钟主频ARM12处理器,采用改进的哈佛架构(harvardarchitecture),实现将高性能32位内核与各种片上外设的完美统一。高级中断管理系统可确保快速的中断响应。完美结合了集成型闪存与RAM存储器功能块的可实现功能强大的功能,堪称机器人控制系统应用的理想选择主要特点:●32位数据宽度,120Mhz时钟主频●1M程序存储空间,128K内存●全速运行仅30mA电流,极度省电●12位分辨率的ADC转换速率高达1MSPS(1000万次每秒)。●提供6路高精度分辨率的PWM发生器,可为控制电机提供前所未有的高精度。●USB高速下载模块,易于程序下载开发,可以存储6个程序。●每个芯片带有唯一标示ID编号,可为无线通讯提供支持。●提供流程图调试的支持
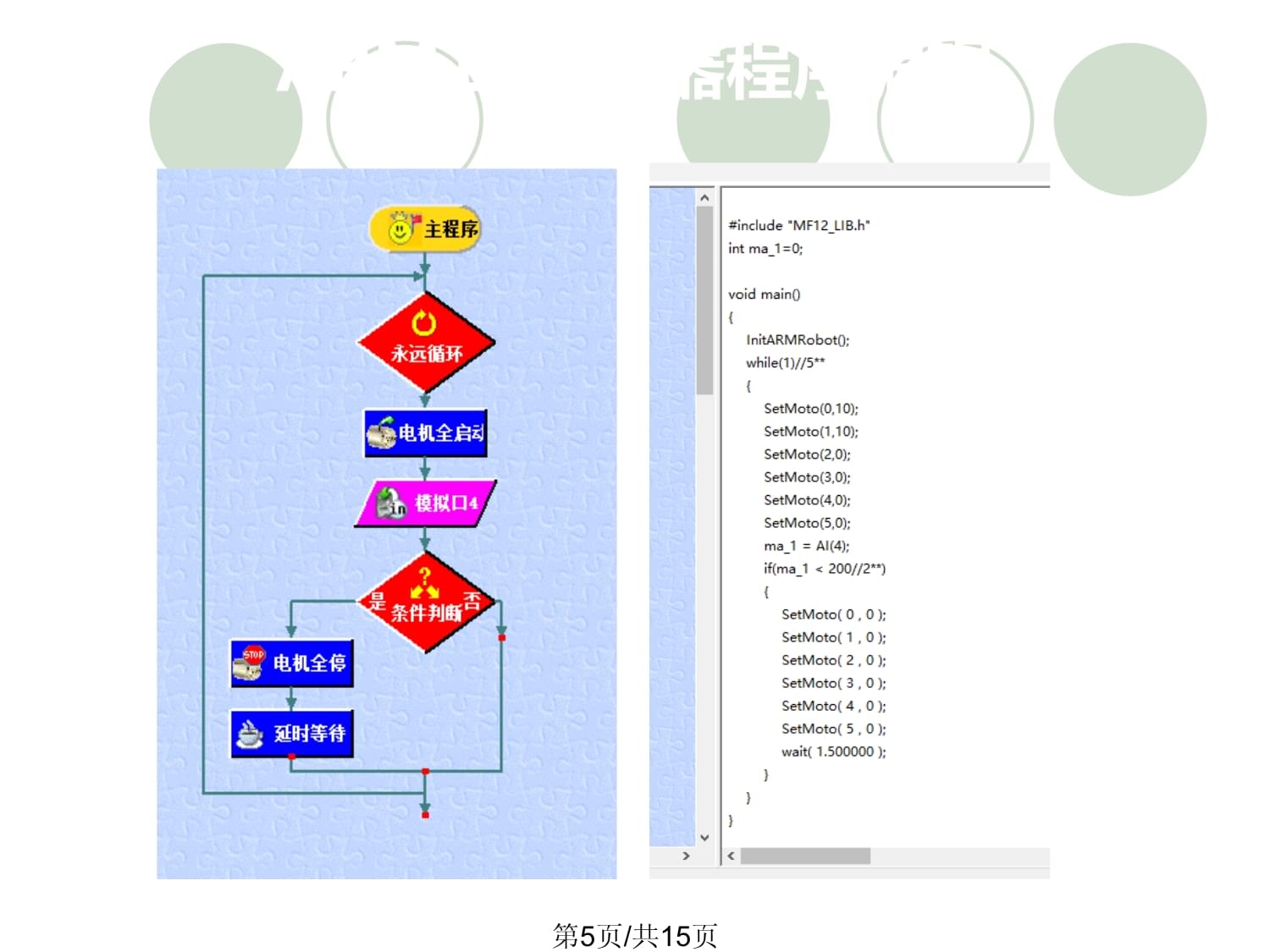
ARM12处理器第4页/共15页ARM12处理器程序编辑第5页/共15页红外光电传感器可以测量10~80cm范围内的物体,并通过模拟信号连接到控制器上。有障碍物返回0,无障碍物返回1。光电距离的标定是数字式的,非常简便实用,稳定性好接口线,由三条线组成黑色线:地线红色线:电源线(+5V)黄色线:信号线红外光电传感器光电传感器工作原理图第6页/共15页传感器标定距离第7页/共15页为了更准确的运行我们采用了两种不同的地面灰度传感器。地面灰度模块是一个能够实现颜色识别的电子部件。可适用于各种环境、各种地面,几乎不受环境光的干扰。可识别黑色、白色、绿色、浅绿、深绿等多种颜色。只需经过简单的A/D转换和简单的处理,就可以很容易地获取地面的颜色数据。该地面灰度可以设定3种发光颜色,保证对场地最大的适应性。函数的返回值为当前地面的反光程度,单通道地面灰度传感器是通过向被测物体发射光波,然后测量反射信号强度的方法实现对物体反射率的测量的。对于较颜色比较深的物体,反射信号比较弱,因而输出电平较低;对于颜色比较浅的物体,反射信号比较强,因而输出电平比较高。通过对输出电压的测量比较,机器人就能判别物体颜色的深浅。地面灰度传感器第8页/共15页基于ARM系统循线程序原理图第9页/共15页行星减速电机调速稳定采用大轮胎运行速度更快更加稳定机械爪执行机构第10页/共15页组装完成第11页/共15页总结
本智能小车电路在硬件上采用了红外线光电开关来检测障碍。PWM技术的应用解决了电动机驱动效率和电机速度控制的问题;采用红外线传感器很好的解决了循线的问题,从而实现更加智能化的循线方式,在软件上,充分利用了ARM的系统资源,使智能小车完美的实现了运、循线等功能。本设计结构简单,调试方便,系统反映快速灵活,硬件电路由可拆卸模块拼接而成有很大的扩展空间。经实验测试,该智能小车设计方案正确、可行,各项指标稳定、可靠。虽然智能小车系统有很多优点,但在设计当中也存在着一些不足。如光电开关受光线影响,没有很好的解决措施,所以在使用中需要注意环境影响,由于没采用双电源供电,使系统的抗干扰性还是欠佳,红外循线部分还可以使用红外对管ST178,可以更加好的隔绝光线的干扰,使小车更加稳定行走。
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 公共汽车能源消耗定额运算示例
- 瓜蒌绿色高效栽培技术
- 2025浙江联盟乳房旋切针类医用耗材集中带量采购中选产品中选产品清单及协议量明细
- 保养鞋子知识培训课件
- 植物病害的防治与研究试题及答案
- 保洁防控培训课件内容
- (一模)2025年广东省高三高考模拟测试 (一) 英语试卷(含官方答案及详解)
- 如何提升国际物流职业素养的试题及答案
- 针对性备考CPSM试题及答案分享
- 精准分析CPSM考试试题及答案
- 2025年中国票据融资行业发展现状、市场运行态势及发展前景预测报告
- 生物-九师联盟2025届高三2月质量检测巩固卷(G)(九师一模)试题和答案
- 2025年仲裁法考试试题及答案
- 2024年成都市新津区卫健系统招聘笔试真题
- 非遗文化之漆扇介绍课件
- MH 5006-2015民用机场水泥混凝土面层施工技术规范
- (正式版)SHT 3078-2024 立式圆筒形料仓工程设计规范
- ME2012F复检秤控制器使用手册(共17页)
- 三级管配筋设计图册
- 高等职业教育法律文秘专业教学资源库
- 长沙理工大学考研桥梁工程复试习题及答案
评论
0/150
提交评论