



付费下载
下载本文档
版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、(一)申请人简历1.杨迎泽2.所在及中南大学,信息科学与,博士、讲师3.受教育经历(从大学本科开始,按时间倒排序):(1)2006/92010/6,中南大学,信息科学与,控制科学与工程专业,获工学博士学位,导师是桂卫华;(2)2003/92006/6,中南大学,信息科学与学位,导师是黄志武教授;,交通信息工程及控制专业,获(3)1999/92003/6,中南大学,信息科学与,自动化专业,获学士学位。4.研究工作经历(按时间倒排序)(1)2010 年 6 月份博士毕业后留校任教,在中南大学信息科学与从事“列车安全运行控制与网络化控制系统”方向的教学科研工作;通信工程系(2)2013 年 1 月2
2、015 年 12 月:参与国家自然科学基金青年科学基金项目网络化控制的协同优化(:61203063),负责分布动态耦合系统中分布式模型式模型控制系统中由局部控制律项、协同控制律项、模型不确定项组成的协同控制律的仿真与实验部分;(3)2011 年 7 月2012 年 7 月:主持高校基本科研业务费青年教师助推专项资助基于信息物理融合网络的异构环境多源接入技术研究(:2011QNZT038),针对高速铁路安全运行的需求,提出一种基于信息物理融合系统的列车安全系统,实现异构网络的有效融合,提高动态数据的传输特性;(4)2011 年 1 月2013 年 12 月:参与完成国家自然科学基金面上项目变结构
3、多故:61073103),负责以重载组合习能力、邻接节点信息交互的标算法实现与仿真;障系统中多智能体动态的分布式(列车同步制动系统为,验证多智能体的准化和化、变结构多故障系统方向的(5)2006 年 9 月2010 年 6 月:对重载组合列车同步制动系统的故障、任务的动态策略和实时任务调度算法等展开研究,并撰写博士重载组合列车同步制动系统故障技术与应用研究。(二) 立项依据与研究内容1. 项目的立项依据本项目针对重载组合列车中具有发展前景的 ECP(Electronically Controlled P电控空气)制动系统这一典型复杂的互联分布式系统中的列车管路漏泄故障atic,带来的,研究分布
4、式故障体系结构中的系统模型参数辨识、互联不确定性估计、故障函数精确描述等关键问题,为重载组合列车 ECP 系统运行提供安全保障。(1)研究意义铁路货运是现代交通体系的重要组成部分,随着国民经济的不断发展,铁路货运组织势在必行。根据国家“十二五”规划和中长期铁路网规划要求,实现“客运高速、货运重载” 是截至 2020 年我国铁路建设的规划蓝图,而作为重载货运的万吨级以上重载组合列车的运行领域的重点研究课题1-2 。和故障技术,已成为国内通国外在重载列车的安全防护和故障方面起步较早。铁路(Assotion ofAmerican Railway,AAR)于 1999 年制定了 AAR-S4200 系
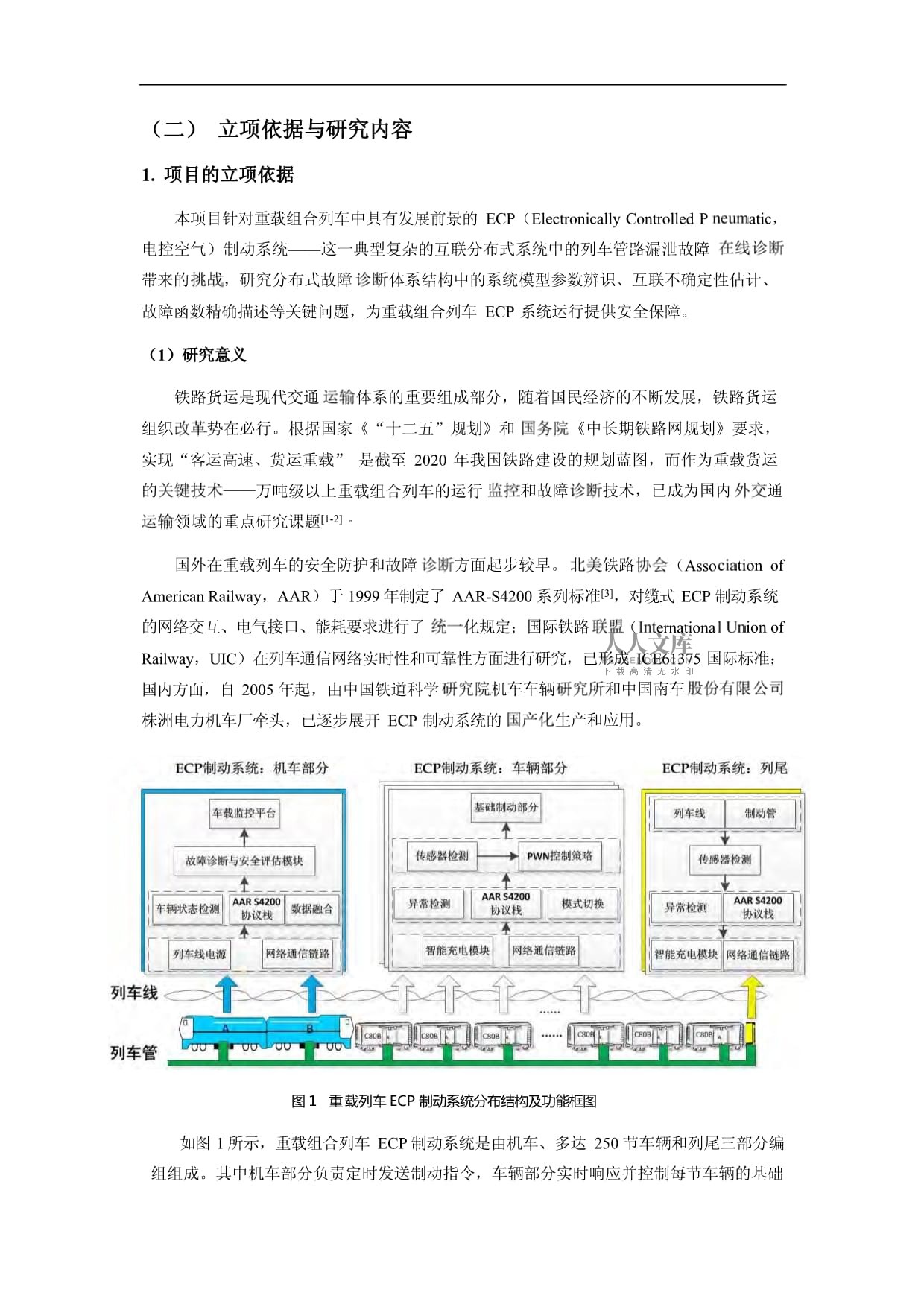
5、列标准3,对缆式 ECP 制动系统的网络交互、电气接口、能耗要求进行了化规定;国际铁路( ernationaion ofRailway,UIC)在列车通信网络实时性和可靠性方面进行研究,已形成 ICE61375 国际标准;国内方面,自 2005 年起,由中国铁道科学机车车辆和中国南车株洲电力机车厂牵头,已逐步展开 ECP 制动系统的生产和应用。图 1 重载列车ECP 制动系统分布结构及功能框图如图 1 所示,重载组合列车 ECP 制动系统是由机车、多达 250 节车辆和列尾三部分编组组成。其中机车部分负责定时发送制动指令,车辆部分实时响应并控制每节车辆的基础制动力,列尾部分列车管和列车线状态。
6、除了传统的贯穿整个列车的列车管来提供空气制动力外,又增加一对列车线来传递电子制动命令4。作为重载组合列车的关键和基础制动设备,ECP 制动系统的运行和故障是值得关注,而重载组合列车的空气管路漏泄故障,是ECP 制动系统可靠运行的最大安全隐患。空气管路漏泄故障不但造成机车持续向列车管补风,还导致列车制动力丢失,产生意外的制动力波动,特别是当列车处于循环制动时较大流量的漏泄可能会引起紧急制动排风,严重重载列车行车安全。为了提高铁路 ECP 技术的应用可靠性,对 ECP制动系统的空气管路漏泄故障进行,是亟待解决的科学问题。对于传统的重载货运列车,只有机车和列尾能够到列车管信号。由于列车管作用域较长,
7、辅助检测信号较少,因此难以采用智能方法或基于模型方法进行和判别,只能依靠乘务员的操作经验和车辆段检修对车辆逐节检查,这不但耗费大量的人力时间,难以检测初期微小流量及车体管路漏泄,而且无法检测列车运行过程中的故障。ECP 技术的应用,为重载组合列车空气管路的漏泄故障进行精确检测和定位提供了可能。装配 ECP 的车辆都安装若干压力和流量传感器,并根据 AAR-S4200 标准实现了异常检测和功能;但在实际使用中,由于车辆间的强耦合互联特性,其故障连锁并发特征明显,无法辨识故障类型、故障位置以及故障参数。当 ECP 制动系统的空气管路漏泄时,没有快速有效的方法来精确定位漏泄车辆、漏泄位置以及漏泄孔截
8、面积等详细精准的故障描述信息,这对智能化和网络化程度较高的ECP 制动系统而言,制约了其推广应用。,使得对 ECP 制动系统的数学建模成为可能;而基于模型的故障技术能够利用对象的数学模型和可观测输入输出量构造残差,来反映系统期望行为与实际行为的差异性,从而实现故障的检测和;在此基础上,设计具有故障项函数的参考模型,利用故障参数辨识技术障对系统的影响,实现故障的检测、和辨识功能5-6。近故对 ECP 制动系统的故障过程,需要解决由于机械加工工艺和纯气动的工作特性导致模型参数的不确定性,以及由于检测传感器安装位置约束造成的故障参数难以直接辨识。,它能够处理存在不确定性的动态系统和多变量互联系统分布
9、式故障中的模型参数和故障参数的不确定性问题。作为 ECP 技术推广过程中亟需解决的关键问题,基于模型的故障和自适应学习的分布式故障技术,为解决重载组合列车空气管路漏泄的故障检测和参数辨识、进一步保障 ECP 制动系统的运行可靠性、我国重载列车安全保障技术水平,提供了良好的技术。本项目的选立,也对一类具有分布式互联特性的复杂系统故障,以及长大管路的漏泄故障精确定位提供一定的借鉴参考作用。目前的一个研究热点是自适应学习方法近年来,随着对大规模复杂系统的异构互联特性研究成果不断涌现(2)国内外研究现状及发展动态分析重载组合列车 ECP 制动系统是一类典型复杂的具有动态互联特性的分布式网络控制系统,子
10、系统间交互关系动态多变,增加了的难度。当前列车级故障的研究热体系、协同及人工智能方面7-8;但是对模型的互联不确定性、点为基于模型的故障参数辨识等关键问题,仍是一个有待于深入研究的课题。1) 列车管路漏泄故障技术模型法三种9-10。国内外将故障技术大致分为信号对比法、人工智能法和信号对比法采用“多点测量,对比判断”原则,实现方便,但硬件开销较大;人工智能法主要应用在历史经验比较完善、过程知识容易获取的中小型复杂系统,利用系统、神经网络等技术模拟人类思维进行故障;模型法需要建立动态系统对象的数学模型,再利用参数估计、状态观测器、滤波器等方法进行故障检测和。早期的重载组合列车管路漏泄故障完全依靠经
11、验数据。早在 1980 年,机械工程师学会(American Society of Mechanical Engineers,ASME)就对空气管路漏泄分布对列车管压力梯度和流量的影响进行研究,并据此制定了货车制动系统安全标准CFR232;中国也在相关的实验数据基础上制定了铁路货车制动装置检修规则。上述方法均在大量实验数据对比和铁路线路运行需求分析的基础上总结得出,主要应用于静态试验性能测试和检修工艺制定考核。随着交叉学科的不断深化,特别是气体动力学和流体力学原理的不断应用,国内外学者开始根据货运列车的运行特性,研究编组长度、列车管系的组成、管路漏泄对列车管充气过程中压力的影响,以基准流量检测
12、模型为主的漏泄故障检测方法也被广泛研究。文献11通过引入状态变换和控制变换,将复杂的重载组合列车纵向动力学模型简化为双重积分器形式,从而设计出重载组合列车分布式协同控制器;文献12建立列车空气制动系统的数学模型并开发出列车制动系统仿真。上述工作主要用于列车编组方式、牵引机车位置、计算制动距离等重载组合列车开行条件的理论计算及实验验证。自 20 世纪 90 年代以来,随着天然气和石油输送管道的大量应用,国内外对其传输原理和漏泄模型进行了深入研究13-17。重载组合列车空气管路与民用管道输送行业(天然气管路、原油管路、水路)都具有输送管路长、存在管路漏泄隐患等故障,因此分析现有长大输送管道的漏泄故
13、障检测算法,对列车管路漏泄故障技术,具有指导作用。天然气和石油管道漏泄故障大都采用基于物质平衡和基准流量检测的算法。文献13采用基于快速傅里叶变换的光谱分析响应技术对复杂管道进行观测,从而检测出管道中是否存在漏泄;文献14在管道署多个传感器,提出基于模型的漏泄监测方法。上述方法虽然能够检测出管道漏泄,但是在精度和速度方面仍然有待提高。为此文献15研究了基于瞬时频率方法在管道漏泄检测的有效性;文献16提出利用声波的方法对长大管路进行漏泄检测和定位;文献17结合粗糙集理论与支持向量机进行管道漏泄检测。重载组合列车空气管路系统这一典型复杂的控制系统,由于参与工作模块众多,且大多数为安装在车辆上的纯空
14、气管路,无法通过安装多个冗余的高精度状态传感器来进行硬件和冗余,因此本项目拟采用模型法,通过建立重载组合列车管路空气制动系统的数学模型,对管路漏泄问题进行故障。当前国内外尚无列车空气管路漏泄的故障方法,其难点主要体现在以下三个方面:建模过程中的参数不确定性问题对于传统的重载货运列车,基于基准流量算法的充排风模型都将车辆简化为若干限流孔和储风元件,其参数不确定性主要来源于以下几个方面:机械加工精度造成的生产误差;煤粉油气造成的气动孔阻塞;充排风不同阶段下气动模块的交互方式发生变化;过程数据传感器造成的“伪偏差”,其中影响较大的是气孔阻塞和交互方式引起的模型参数不确定性。对 ECP 制动系统来说,
15、除了模型参数不确定性问题外,还应考虑其电控空气制动特性,主要分析高速电空阀的特性参数、(脉宽调制算法)的有效性、工作风缸容积、漏泄孔截面积等实际控制需求,这不仅增加了空气管路充排风过程建模的难度,也引入了新的参数不确定性。制动力传递过程中强耦合特性下邻接车辆的互联参数不确定性问题重载列车的制动力由列车管进行传递,每节车辆的制动力不但受控于自身 ECP 系统的制动特性,同时受邻接车辆的制动力影响。而受 ECP 制动系统通信带宽限制,难以实施获取邻接子系统的状态变量,因此需要对邻接车辆 ECP 制动系统的互联参数进行估计和学习,才能够真正保障故障的精度。漏泄故障的和故障参数辨识问题重载组合列车不同
16、于其他的工业生产系统,漏泄故障是列车运行的严重隐患,但实际运用时,列车需要在微小流量的漏泄故障(不超过 5085KPa/s)下继续维持运行,避免出现“机破”事故,造成列车线路阻塞,扩大故障影响。因此,除了对漏泄故障进行和定位外,更重要的是能够对漏泄车辆、漏泄孔位置以及漏泄孔截面积等详细的故障信息进行辨识,以便乘务员进行性运行,避免故障升级。基于上述分析,国内外成故障方法为解决重载列车空气管路漏泄提供了一定的技术路线和借鉴作用,但由于重载组合列车 ECP 制动系统的特殊应用背景和工作环境,现有的故障方法本项目的故障要求,需要从整体上对故障的体系结构、精度及可靠性方面进行研究。2) 分布式故障技术
17、对于传统的重载列车,只有牵引机车和列尾才能制动力过程数据,适合采用集中式故障方法对列车管路故障进行估算和定性分析,但效率较低,精度也有待提高;对于装配 ECP 制动系统的重载列车,其机车和车辆通过网络交换数据,适合采用非集中式的故障方法,常用的有分散式结构和分布式结构两种。由于分散式结构难以解决 ECP 制动系统邻接互联特性的动态耦合和通信信息交换等问题,因此本项目适合采用分布式故障体系结构。分布式故障技术针对一类动态特性复杂、空间上呈分布状态、子系统存在互联影响和信息交互的分布式复杂系统,子系统通过网络交互数据,协作完成故障任务。该技术提高效率和精度,节省计算资源、减少通信带宽,提高系统扩展
18、性和鲁棒性。近年来,分布式故障方法受到国内外学者的广泛关注,取得一定的研究成果。针对规模较小、通信质量良好的系般采用基于全局信息的分布式故障框架。文献18建立一组分布的观测器,局部子系统的测量值和其它所有观测器传送的信息进行故障;文献19针对二阶线性连续时间互联系统,利用全局信息为每个子系统构造一组未知输入观测器用于观测系统的状态,通过分布式线性控制律描述子系统间的相互影响。该框架实现方式简单,精度高,但对系统计算资源和网络通信资源的开销较大。对于计算资源、通信资源受限或非完整拓扑下的分布式系统故障,主要采用基于邻接节点信息的框架。文献20利用分解法,通过引入一致性滤波器,利用子系统局部信息和
19、关联子系统的状态信息来进行分布式故障;文献21提出了一种分布式实时故障与容错方案,通过定义两种通信模式研究子系统的动态互联特征,实时检测并收集邻接子系统的有限相对状态信息进行故障。然而该框架依赖系统数学模型的精确描述,未考虑系统扰动、参数不确定性、以及互联不确定性等对精度的影响。为解决一类具有模型不确定性、扰动和测量噪声的非线性互联系统难题,文献22提出一种基于滤波的分布式故障检测策略,增加的鲁棒性和故障检测精度。文献23针对一类非线性不确定系统,采用自适应 近技术学习模型不确定性,并基于非线性观测器策略设计传感器故障检测和模块。上述方法需要获取全局状态信息,难以解决因通信受限造成的精度和实时
20、性问题。对于基于邻接节点信息的故障,文献24针对一类时变时滞系统,提出一种快速自适应故障估计算法,建立时滞相关稳定化条件来减少误差;文献25考虑了通信传输时延,构建基于事件的故障检测模型,并设计基于事件的故障检测滤波器,减小未知输入、通信时延和非线性扰动对残差信号的影响;文献26为提出一种时延补偿策略,解决局部故障器间通信网络中的时延和丢包,引入具有时变权重的基于一致性的估计器,提高多个子系统变量共享情况下的检测能力。对于具有邻接强耦合特性的互联系统故障,容易引起连锁和故障并发,因此需要研究互联子系统间解耦问题,提高系统鲁棒性。文献27针对一类离散时延复杂互联线性耦合网络,设计基于自适应 近的
21、分布式故障观察器,近模型不确定性参数;文献28针对一类存在部分通信的非线性互联系统,为每个子系统设计一个非线性估计器,子系统间根据基于误差的通信协议来交换状态信息,实现分布式故障检测和故障调节。重载组合列车 ECP 制动系统是具有邻接互联特性的网络化控制系统,适合采用基于邻接节点信息的分布式框架。当前的研究成果能够对系统参数、故障位置及故障函数进行定性判断;但难以解决一类互联函数不确定的网络化控制系统的故障及参数辨识要求。本项目在结合已有的工作基础上,期望通过引入分布式人工智能领域中的分布式故障、智能自适应学习等理论和技术,寻找合适的解决方案。其中将自适应学习方法应用到分布式故障,是近年来的研
22、究热点,也是本课题的研究重点之一。3) 自适应学习方法及其在分布式故障中的应用分布式故障中的自适应学习方法,其基本是在模型的观测器中加入学习和动态估计方法,引入具有自适应参数的非线性多变量估计项,利用系统稳定性理论动态 近模型参数或故障参数,提高 精度和可靠性29。该方法满足系统模型参数和扰动不确定时的故障参数高精度辨识需求,实现了新的自适应参数估计器设计方法。当前研究较多的自适应学习方法有神经网络、极值搜索、最小二乘法、小波分析等30。由于神经网络具有良好的习和自适应性,其计算的并行性和的分布性适合分布式故障系统的部署实施31。基于神经网络的自适应学习方法不但能够辨识模型的未知参数,还能近故
23、障函数,在国内外有广泛的研究基础。文献32针对一类具有未知输入的时延非线性系统,设计了一种基于径向基神经网络的滑模观测器,对传感器故障进行;文献33提出一种基于非线性自适应 近策略的混合模型故障方法,将故障检测、故障和故障辨识设计为两种不同结构的自适应神经网络参数估计器,分别用于消除测量噪声和快速故障。极值搜索是一种不依赖精确模型的具有全局最优搜索功能的参数最优化方法,能够根据闭环搜索框架估计极值输出对应的系统输入。该方法自 2000 年 M. Krsti 和H. Wang 严格证明了极值搜索闭环框架稳定性34,逐渐成为模型参数辨识和故障函数识别领域的研究热点。文献35设计基于极值搜索的最大功
24、率点的算法来优化能板阵列的性能,测试并网逆变器的工作效率;文献36提出一种全局极值搜索算法优化发射天线和高频发热问题,简化了控制算法的设计过程;文献37设计自适应激励函数增益,根据时标分离和平均方法,以实现全局极值的任意小领域收敛;文献38设计一种基于随机激励函数的极值搜索算法,优化具有不可性的系统模型,并给出闭环收敛域和收敛的稳定性条件。除了神经网络和极值搜索外,文献39设计基于带遗忘因子的最小二乘算法的估计器,轨道和姿态调节过程中由于故障导致的控制参数变化;文献40针对网络化控制系估计统的网络诱导时延和数据丢包问题,设计基于递推最小二乘辨识的网络化模型算法和网络化滚动优化算法,实现被控对象
25、参数未知或缓慢变化时的网络化反馈修正;文献41针对复杂系统控制过程中过程模型中非线性项问题,提出一种基于多核的偏最小二乘的故障算法,能够捕获子系统间的通信互联信息,并充分 近其非线性未知项。综上所述,对重载组合列车互联 ECP 制动系统的研究,除了要结合现有相关技术成果外,更要考虑其独有特征: ECP 制动系统利用 LONWORKS 网络发送制动命令,是一个分布式控制系统,因此适宜采用分布式故障体系结构;重载组合列车的列车管贯穿整个列车,实现制动力的,各车辆仅与邻接车辆的耦合特性明显,而且考虑到LONWORKS 网络较低的传输速率,因此适宜采用基于邻接节点的分布式故障框架;除此之外,为保证的精
26、度和可靠性,还应对制动系统数学模型参数未知、车辆间互联参数不确定、故障函数辨识等问题进行深入研究。因此,实现重载组合列车互联 ECP 制动系统的故障,迫切需要建立一种有效的分布式故障系统。本项目在结合已有的工作基础上,期望在基于邻接节点的分布式故障体系结构中引入自适应参数估计、神经网络学习、极值搜索算法等理论和技术,寻求一种自适应学习机制,满足系统的数学模型参数未知、车辆间互联参数不确定、故障函数辨识等要求,建立一种互联分布式故障体系结构。通过在典型的互联分布式网络化控制系统重载组合列车互联 ECP 制动系统下进行实际应用,验证该技术的有效性。本项目的研究将为分布式故障提供一种新的方法,对促进
27、分布式人工智能理论和应用的发展具有一定的科学意义和应用价值。主要参考文献1M. Chou, X. H. Xia, C. Kayserb. Ming and MValidation of Heavy-haul TrainsEquipped with Electronically Controlled PPractice, 2007, 15(4), pp. 501-509.atic Brake Systems. Control Engineering2L. J. Zhang, X. T. Zhuan. Optimal Operation of Heavy-haul Trains Equipped
28、withElectronically Controlled Patic Brake Systems using MPredictive ControlMethodology. IEEE Tranions on Control Systems Technology, 2014, 22(1), pp. 13-22.3Assotion of American Railroads. AAR Manual of Standards andmended PractiElectronically Controlled Brake Systems: Safety and Operations. USA: As
29、sotion ofAmerican Railroads, 2011.4耿志修. 大秦铁路重载技术.: 中国铁道, 2009.5X. H. Xia, J. F. Zhang. Ming and Control of Heavy-haul Trains. IEEE Control SystemsMagazine, 2011, 31(4), pp. 18-24.6K., Z. W. Huang, J. Wang, J. Peng, W. R. Liu. Decentralized Control of Heavy-Haul Trains with Input Constras and Communi
30、cation Delays. Control Engineering Practice,2013, 21(4), pp. 420-427.7M. H. Dingler, Y. C. Lai, C. P. L. Barkan. Effects of Communications-based Train Control and Electronically Controlled Patic Brakes on Railroad Capacity. TransporionResearch Record: Journal of Transporion Research Board, 2010, 215
31、9(10), pp. 77-84.8X. T. Zhuan, X. H. Xia. Optimal Scheduling and Control of Heavy Haul Trains EquippedWith Electronically Controlled Patic Braking Systems. IEEE Tranions on ControlSystems Technology, 2007, 15(6), pp. 1159-1166.9P. M. Fr. Fauiagnosis in Dynamic Systems usingytical and Knowledge-based
32、Redundancy a Survey and Some New Results. Automatica, 1990, 26(3), pp. 459-474.10 R. J. Patton, P. M. Fr, R. N. Clark. Ies of Fault Diagnosis for Dynamic Systems.London: Springer-Verlag, 2000.11 高凯, 黄志武, 王晶, 彭军, 刘伟荣. 一种重载组合列车的分布式协同控制方法. 铁道学报, 2013, 35(1), pp. 51-59.12 魏伟, 杜念博. 重载列车制动管对制动性能的影响. 交通工程学
33、报, 2011, 11(5), pp.49-54.13 A. L. Ekuakille, G. Vendramin, A. Trotta. Robust Spectral Leak Detection of Complex Pipelines using Filter Diagonalization Method. IEEE Sensors Journal, 2009, 9(11), pp.1605-1614.14 C. Verde.modation of Multi-leak Location in a Pipeline. Control EngineeringPractice, 2005,
34、 13(8), pp. 1071-1078.15 M. F. Ghazali, S. B. M. Beck, J. D. Shucksmith, J. B. Boxall, W. J. Staszewski. Comparative Study of Instantaneous Frequency Based Methods for Leak Detection in Pipeline Networks.Mechanical Systems and Signal Prosing, 2012, 29(1), pp. 187-200.16 L. Y. Meng, Y. X. Li, W. C. W
35、ang, J. T. Fu. Experimental Study on Leak Detection andLocation for Gas Pipeline Based on Acoustic Method. Journal of Loss Prevention in thePros Industries, 2012, 25(1), pp. 90-102.17 S. K. Mandal, F. T. S. Chan, M. K. Tiwari. Leak Detection of Pipeline: AnegratedApproach of Rough Set Theory and Art
36、ifil Bee Colony Trained SVM. Expert Systemswipplications, 2012, 39(3), pp. 3071-3080.18 S. X. Ding, P. Zhang, C. Chihaia, W. Li, Y. Wang, E. L. Ding. Advanced Design Scheme for Fault Tolerant Distributed Networked Control Systems. Proceedings of the 17th IFAC worldcongress, Seoul, Korea, 2008, pp. 1
37、3569-13574.19 I. Shames, A. M. H. Teixeira, H. Sandberg, K. H. Johansson. Distributed Fauetection forerconnected Second-order Systems. Automatica, 2011, 47(3), pp. 2757-2764.20 R. M. G. Ferrari, T. Parisini, M. M. Polycarpou. Distributed Fauetection and Isolation ofLarge-scale Discrete-time Nonlinea
38、r Systems: An Adaptive Approximation Approach. IEEETranions on Automatic Control, 2012, 57(2), pp. 275-290.21 M. Guo, D. V. Dimarogonas, K. H. Johansson. Distributed Real-time Fault Detection and Isolation for Cooperative Multi-agent Systems. 2012 American Control Conference (2012ACC), Montreal, Can
39、ada, 2012, pp. 5270-5275.22 C. Keliris, M. M. Polycarpou. A Distributed Fauetection Filtering Approach for a Classoferconnected Input-output Nonlinear Systems. European Control Conference, Zurich,Switzerland, 2013, pp. 422-427.23 V. Reppa, M. M. Polycarpou, C. G. Panayiotou. Adaptive Approximation f
40、or Multiple SensorFauetection and Isolation of Nonlinear Uncertain Systems. IEEE Tranions on NeuralNetworks and Learning Systems, 2014, 25(1), pp. 137-153.24 B. Jiang, K. Zhang, P. Shi. Less Conservative Criteria for FaultTime-varying Delay Systems using Adaptive Fault Diagnosis Observer.modation of
41、ernationalJournal of Adaptive Control and Signal Prosing, 2010, 24(4), pp. 322-334.25 J. L. Liu, D. Yue. Event-based Fauetection for Networked Systems with CommunicationDelay and Nonlinear Perturbation. Journal of the Fr2791-2807.lin Institute, 2013, 350(9), pp.26 F. Boem, R. M. G. Ferrari, T. Paris
42、ini, M. M. Polycarpou. Distributed Fauetection forUncertain Nonlinear Systems: A Network Delay Compensation Strategy. 2013 AmericanControl Conference (2013ACC), Washington, DC, USA, 2013, pp. 3555-3560.27 Z. S. Wang, H. X. Guan, C. D. Zheng. Fauiagnosis Observer Design for Discrete-timeDelayed Compl
43、exerconnected Networks with Linear Coupling. Mathematical problemsin Engineering, 2012, 2012(1), pp. 1-22.28 P. Panagi, M. M. Polycarpou. Distributed Faultmodation for a Class oferconnected Nonlinear Systems with Partial Communication. IEEE Tranions onAutomatic Control, 2011, 56(12), pp. 2962-2967.2
44、9 I. Rish, M. Brodie, S. Ma, N. Odsova, A. Beygelzimer, G. Grabarnik, K. Hernandez.Adaptive Diagnosis in Distributed Systems. IEEE Tran16(5), pp. 1088-1109.ions on Neural Networks, 2005,30 M. Krstic, P. V. Kokotovic, I. Kanellakopoulos. Nonlinear and Adaptive Control Design.USA, John Wiley & Sons, I
45、nc, 1995.31 P. M. Fr.ytical and Qualiive M-based Fault Diagnosis-a Survey and SomeNew Results. European Journal of control, 1996, 2(1), pp. 6-28.32 M. Chen, C. S. Jiang, Q. X. Wu. Sensor Fauiagnosis for a Class of Time Delay UncertainNonlinear Systems using Neural Network.Computing, 2008, 5(4), pp.
46、401-405.ernational Journal of Automation and33 E. S. Tehrani, H. A. Tai, K. Khorasani. Hybrid Fault Diagnosis of Nonlinear Systemsusing Neural Parameter Estimators. Neural Networks, 2014, 50(1), pp. 12-32.34 M. Krsti, H. H. Wang. Stability of Extremum Seeking Feedback for General NonlinearDynamic Sy
47、stems. Automatica, 2000, 36(4), pp. 595-601.35 S. L. Brunton, C. W. Rowley, S. R. Kulkarni.umer PoTracking forPhotovoltaicOptimizationusingRippased ExtremumSeekingControl.IEEETranions oner Electronics, 2010, 25(10), pp. 2531-2540.36 D. Carnevale, A. Astolfi, C. Centioli, S. Podda, V. Vitale, L. Zacc
48、arian. A New ExtremumSeeking Technique and its Application toEngineering and Design, 2009, 84(2), pp. 554-558.ize RF Heating on FTU. Fu37 Y. Tan, D. Nei, I. M. Y. Mareels. On Global Extremum SeekingExtrema. Automatica, 2009, 45(1), pp. 245-251.he Presence of Local38 C. Manzie, M. Krsti. Extremum See
49、king with Stochastic Perturbations. IEEE Tranon Automatic Control, 2009, 54(3), pp. 580-585.ions39 T. Jiang, K. Khorasani, S. Tafazoli. Parameter Estimation-based Fault Detection, Isolationand Recovery for Nonlinear Salite MTechnology, 2008, 16(4), pp. 799-808.s, IEEE Tranions on Control Systems40 唐
50、斌, 章云, 刘国平, 桂卫华. 面向网络诱导时延和数据包丢失补偿的网络化广义控制. 控制理论与应用, 2010, 27(7), pp. 45-46.41 Y. Zhang, H. Zhou, S. J. Qin, T. Chai. Decentralized Fauiagnosis of Large-scaleProses using Multiblock Kernel Partial Least Squares. IEEE Tranions on IndustrialInformatics, 2010, 6(1), pp. 3-10.2. 项目的研究内容、研究目标,以及拟解决的关键科学问题
51、。(此部分为重点阐述内容)(1)研究内容本项目依据故障的典型分析设计方法,依次按照分布式故障体系结构、对象数学模型、过程中的不确定性参数估计、故障函数的精确辨识、实验验证平台设计等五个内容进行研究。1)分布式故障体系结构针对一类具有邻接耦合特性的互联分布式网络控制系统,研究基于邻接节点信息的分布式体系结构。根据子系统间的邻接耦合互联参数,建立系统关联模型;利用局部信息和邻接节点信息,设计基于自适应学习的不确定性参数估计器;设计基于极值搜索的故障函数辨识算法,构建一组故障函数估计器,利用系统残差和阈值来进行故障的检测以及故障函数辨识,实现故障的功能。2)列车空气管路充排风过程数学模型针对 ECP
52、 制动系统特殊的双线(列车管、列车线)制动力方式,建立长大列车空气管路充排风过程数学模型。将车辆简化为若干限流孔和储风元件的互联系统,根据流体连续性方程和伯努利定律推导出ECP 子系统的充排风模型;根据 ECP 制动系统的编组方式,将制动系统的充排风过程转化成一类具有互联参数不确定性的互联分布式系统,根据充排风过程中气动模块的交互方式,建立子系统关联模型;在此基础上,利用物质平衡和基准流量算法,建立重载组合列车互联 ECP 制动系统空气管路充排风过程数学模型。3)基于自适应学习的模型和互联不确定性参数估计器针对系统模型参数的有界不确定性缓慢变化特点,在框架的自适应参数估计器中引入自适应变步长的
53、神经网络学习策略,将模型状态估计值和系统状态输出作为反馈权系数,实现参数的快速收敛;针对子系统间互联参数不确定性的时变特性带来的精度问题,为改善神经网络训练后期收敛速度慢且容易陷入局部最小的缺点,通过引入参数估计项,提出一种快速启发式网络学习算法,在状态估计的同时实现未知参数的辨识。4)基于极值搜索的故障函数辨识为实现漏泄故障的精确描述,在框架的故障函数估计器中引入基于极值搜索的故障函数辨识算法。基于时标分离和奇异分解技术,研究极值搜索的过程稳定性,设计极值搜索闭环反馈中激励函数的构造形式;研究故障函数的收敛域,设计可调节的激励函数增益,保证系统的全局收敛;研究极值搜索的收敛速度,设计一种参数
54、可调的闭环搜索算法,通过调节极值搜索闭环控制参数,最优化其收敛速度。5)重载组合列车 ECP 制动系统实验验证与应用在完成理论研究的基础上,对本项目算法进行仿真计算和半实物实验验证。搭建基于环境的分布式半实物仿真系统,构建互联分布式控制系统仿真环境;开发基于自适应学习的分布式故障应用包,研究和验证分布式故障体系结构及具体算法的可靠性和实时性。(2)研究目标本项目的研究目标是:针对一类具有邻接耦合特性的互联分布式系统,提出一种具有自适应学习机制的分布式故障体系结构,在此基础上实现以下三个技术突破:建立重载组合列车空气管路充排风过程数学模型;提出一种基于自适应神经网络的学习方法,估计系统模型不确定
55、性参数和互联不确定性参数;设计一种基于极值搜索的故障函数辨识算法,对重载组合列车空气管路漏泄故障进行和精确描述。(3)拟解决的关键问题本项目拟解决的关键问题包括:1) 如何根据现有研究基础,分析重载组合列车互联 ECP 制动系统的故障实际需求,结合典型的故障设计分析方法,针对一类具有邻接耦合特性的互联系统,建立分布式故障的一般性体系结构;2) 在分析 ECP 制动系统编组方式、工作模式下制动力的特性基础上,如何描述其模型参数不确定性和互联参数不确定性问题,并利用流体连续性方程和伯努力定律对重载组合列车的空气管路充排风过程进行建模;3) 考虑模型参数的有界不确定性缓慢变化特点,以及互联参数的不确
56、定性动态时变特点,在通信资源受限情况下,如何利用互联系统的邻接节点信息,对模型的参数不确定性和互联参数不确定性进行参数估计;4) 当系统故障已经被检测和后,如何根据故障类型对系统模型的影响,设计一种不依赖精确数学模型的自适应函数辨识算法,对空气管路漏泄故障进行和精确描述。只要上述这些问题得到解决,本项目的研究将取得突破性的进展,进而建立一种具有自适应学习机制的分布式故障系统,并将该技术应用于重载组合列车互联 ECP 制动系统,为分布式故障理论及其应用提供新的设计思路和验证。3. 拟采取的研究方案及可行性分析。(包括有关方法、技术路线、实验键技术等说明)、关(1)拟采取的研究方案研究方法上采取理
57、论研究为主导、实验分析进行验证,实验进一步推进理论的循序递进的方式展开研究,吸收与创新相结合的方法,结合各个研究内容的内在联系,按照由分布式故障体系结构、ECP 制动系统数学模型、不确定性参数估计、故障检测障函数辨识的顺序进行研究,总体研究路线如图 2 所示。和故图 2分布式故障体系结构功能框图本项目分布式故障系统体系结构主要包括建立系统数学模型、对模型参数不确定性和互联不确定性进行估计、对漏泄故障进行检测和故障参数辨识,实现对重载组合列车互联 ECP 制动系统的分布式故障目的。(2)各研究内容的具体路线1)构建分布式故障体系结构本项目拟采用由特殊到一般的方法,首先针对重载组合列车互联 ECP
58、 制动系统,研究其分布式故障技术,然后逐步推广到一般的具有邻接耦合特性的互联分布式系统故障,从而建立分布式故障体系结构。首先,针对重载列车分布式互联 ECP 制动系统,将建模过程中的模型不确定性和互联参数不确定性转化为结构化的系统扰动,在流体连续性方程和伯努力定律基础上,对重载列车 ECP 制动系统的空气管路充排风过程进行建模;然后,利用局部信息和邻接子系统信息,为每个子系统构造具有自适应阈值的故障检测估计器;在此基础上,在所构造的检测估计器中引入模型参数估计项和互联参数估计项,利用基于自适应近的算法,对模型参数不确定和互联参数不确定项进行近学习,实现不确定项的解耦。最后,为系统构造一组平行的
59、故障函数估计器,由残差产生器根据子系统的实际输出与故障函数估计器的输出生成多个残差信号,并设计一组相应的自适应阈值;采用基于广义观测器的故障决策,实现故障子系统的定位;通过在估计器中引入基于极值搜索的故障函数辨识算法,实现对漏泄故障的精确描述。根据上述方法基于自适应估计器的分布式故障体系结构能够对大规模的分布式互联 ECP 制动系统进行故障,保证故障的可检测性,快速辨识故障函数,实现空气管路漏泄故障。2)建立列车空气管路充排风过程数学模型本项目拟在分析 ECP 制动系统编组方式和工作模式下的制动力特性基础上,针对重载组合列车空气管路系统的网络化、模块化、智能化等特点,根据长大列车空气管路的机械
60、和物理结构,建立长大列车空气管路充排风过程的数学模型,其理论基础为流体连续性方程和伯努利定律。首先,将车辆简化为若干限流孔和储风元件的互联系统。不考虑列车管充排风过程中空气温度变化,将列车管看作一个容积确定,压力连续均匀变化的容器。根据理想空气流量方程,得出声速阶段和亚声速阶段的节流孔模型;根据流体连续性方程,得到以气体状态参数描述的等熵气体动力学方程;根据限流孔和储风元件的互联关系,推导得到气体流速与气缸内压力的关系,即单节车辆 ECP 制动系统的充排风模型。其次,根据 ECP 制动系统的编组特性,考虑列车管之间存在的强耦合特性以及网络通信时延的特点,将制动系统的充排风过程转化成一类具有互联
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 2026年度专业技术人员继续教育公需科目试题及答案
- 2026年ps考试试卷及答案
- 2026年《中华人民共和国医师法》题库(附答案解析)
- 2026年内蒙古自治区“选调生(草原碳汇方向)”专项面试预测题及答案
- 2026年党建党史党章知识竞赛试题库和答案
- 2026年共青团青年守则知识考试题库附答案
- 2025山东东财建设投资集团有限公司招专业技术人员书笔试历年参考题库附带答案详解
- 2025国家电投中国电力所属单位招聘2人笔试历年参考题库附带答案详解
- 2025中国石化人才招聘笔试历年参考题库附带答案详解
- 2025中兵无人机研究院有限公司校园招聘笔试历年参考题库附带答案详解
- DL∕ T 736-2010 农村电网剩余电流动作保护器安装运行规程
- 量子力学+周世勋(全套完整)课件
- 新郑龙湖学院机电安装施工组织设计
- 有趣的行为金融学智慧树知到期末考试答案章节答案2024年上海海洋大学
- 废水检验知识讲座
- 月嫂个人简历范本通用模板
- 生产过程中间品检验
- 新人教版-八年级数学下册-勾股定理课件(第一课时)
- GB/T 17622-2008带电作业用绝缘手套
- 化学前沿-碳材料课件
- STULZ空调操作手册
评论
0/150
提交评论