



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
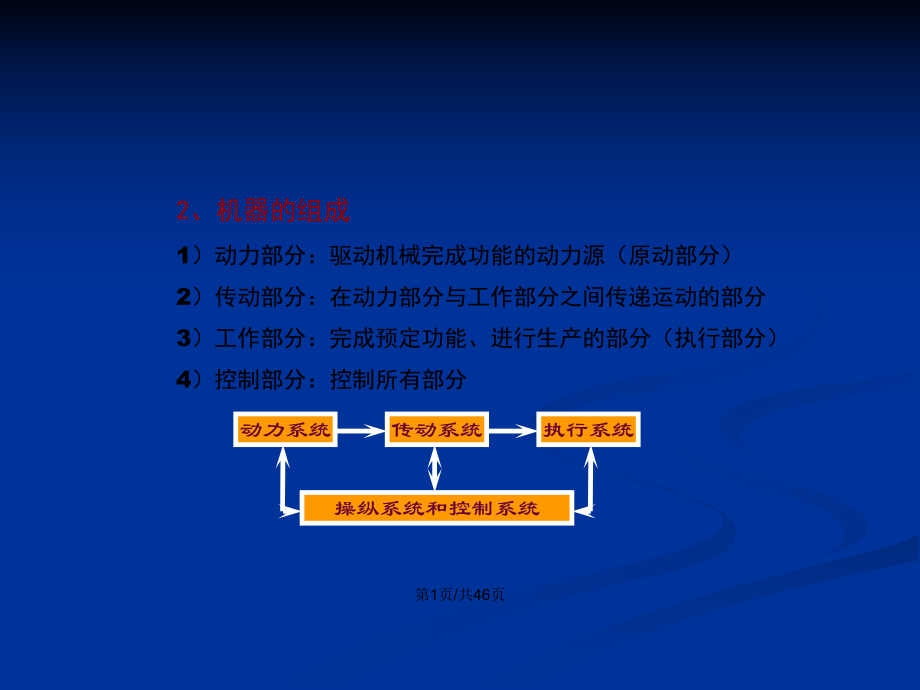
1、会计学1平面机构运动简图及其自由详解平面机构运动简图及其自由详解2、机器的组成1)动力部分:驱动机械完成功能的动力源(原动部分)2)传动部分:在动力部分与工作部分之间传递运动的部分3)工作部分:完成预定功能、进行生产的部分(执行部分)4)控制部分:控制所有部分动力系统传动系统执行系统操纵系统和控制系统第1页/共46页构件可以是一个零件;也可以是由一个以上的零件组成。图示内燃机中的连杆就是由单独加工的连杆体、连杆头、轴瓦、螺杆、螺母、轴套等零件组成的。这些零件作为一个整体运动,相互之间不产生相对运动。气缸体气缸体活塞活塞连杆连杆曲轴曲轴第2页/共46页3 构件和零件的比较1)构件:从运动角度来看
2、,任何机器(或机构从运动角度来看,任何机器(或机构)都是由许多独立运动单元体组合而成的,这)都是由许多独立运动单元体组合而成的,这些独立运动单元体称为构件。些独立运动单元体称为构件。2)零件:从加工制造角度来看,任何机器(或从加工制造角度来看,任何机器(或机构)都是由许多独立制造单元体组合而成零机构)都是由许多独立制造单元体组合而成零件,这些独立制造单元体称为零件。件,这些独立制造单元体称为零件。第3页/共46页4、机械的分类1)动力机械:将非机械能转换为机械能2)能量转换机械:将机械能转换为非机械能3)工作机械:利用机械能完成一定工作第4页/共46页第5页/共46页第6页/共46页五、运动副
3、的分类:空间运动副空间运动按相对运动范围分:平面运动副平面运动球面副螺旋副第7页/共46页若两构件之间的相对运动均为空间运动,则称为空间运动副。若两构件之间的相对运动均为空间运动,则称为空间运动副。螺旋副螺旋副球面副球面副第8页/共46页平面运动副:两构件之间的相对运动为平面运动( (1 1) )低副低副两构件通过面接触构成的运动副,两构件通过面接触构成的运动副,根据两构件间的相对运动形式,低副又分为移动副和转动副。一个低副引入两个约束。移动副移动副 两构件间的相对运动为直线运两构件间的相对运动为直线运动动第9页/共46页两构件间的相对运动为转动两构件间的相对运动为转动转动副(铰链)转动副(铰
4、链)第10页/共46页(2 2)高副两构件通过点或线接触构成的运动副。一个高副引入一个约束凸轮高副(点接触)凸轮高副(点接触)第11页/共46页齿轮副(线接触)齿轮副(线接触) 第12页/共46页第13页/共46页第14页/共46页构件均用直线或小方块等来表示,画有斜线的表示机架构件均用直线或小方块等来表示,画有斜线的表示机架。第15页/共46页第16页/共46页构件组成转动副时,如下图表示。构件组成转动副时,如下图表示。 图面垂直于回转轴线时用图图面垂直于回转轴线时用图a a表示;表示;图面不垂直于回转轴线时用图图面不垂直于回转轴线时用图b b表示。表示。第17页/共46页表示转动副的圆圈,
5、其圆心必须与回转轴线重表示转动副的圆圈,其圆心必须与回转轴线重合。合。一个构件具有三以上个转动副时,则应在两条一个构件具有三以上个转动副时,则应在两条交叉处涂黑,或在其内画上斜线。交叉处涂黑,或在其内画上斜线。第18页/共46页两构件组成移动副,其导路必须与相对移动方两构件组成移动副,其导路必须与相对移动方向一致。向一致。第19页/共46页 两构件组成平面高副时,其运动简图中应画出两构两构件组成平面高副时,其运动简图中应画出两构件接触处的曲线轮廓,对于凸轮、滚子,习惯划出其件接触处的曲线轮廓,对于凸轮、滚子,习惯划出其全部轮廓;对于齿轮,常用点划线划出其节圆。全部轮廓;对于齿轮,常用点划线划出
6、其节圆。第20页/共46页第21页/共46页第22页/共46页第23页/共46页第24页/共46页第25页/共46页气缸体气缸体1活塞活塞2进气阀进气阀3排气阀排气阀4连杆连杆5曲轴曲轴6凸轮凸轮7顶杆顶杆8齿轮齿轮10解:解:1)分析运动,确定构)分析运动,确定构件的类型和数量件的类型和数量 2)确定运动副的类型和)确定运动副的类型和数目数目 3)选择视图平面)选择视图平面 4)选取比例尺,根据)选取比例尺,根据机构运动尺寸,定出各运机构运动尺寸,定出各运动副间的相对位置动副间的相对位置 5)画出各运动副和机构)画出各运动副和机构符号,并表示出各构件符号,并表示出各构件第26页/共46页第2
7、7页/共46页第28页/共46页n = 3, Pl = 4, Ph = 0 F = 3n - 2Pl - Ph =33 - 2Pl - Ph =33 - 24 - 0= 1 第29页/共46页n = 3, Pl = 4, Ph = 0 F = 3n - 2Pl - Ph =33 - 2Pl - Ph =33 - 24 - 0= 1 第30页/共46页机构具有确定运动时所必须给定的独立运动参数的数目称机构的自由度。平面机构具有确定运动的条件:机构原动件个数应等于机构的自由度数目。 第31页/共46页1.1.复合铰链复合铰链2.2.局部自由度局部自由度 两个以上构件在同一轴线处用转动副连接,就形成
8、了两个以上构件在同一轴线处用转动副连接,就形成了复合铰链。复合铰链。 个别构件所具有的,不影响整个机构运动的自由度称个别构件所具有的,不影响整个机构运动的自由度称为局部自由度。为局部自由度。 第32页/共46页3.3.虚约束虚约束 重复出现的,对机构运动不起独立限制作用的约束称重复出现的,对机构运动不起独立限制作用的约束称为虚约束。为虚约束。 4.4.虚约束常见情况及处理方法虚约束常见情况及处理方法 5.5.虚约束对机构的影响虚约束对机构的影响 第33页/共46页三个构件在同一轴线处,两个转动副。三个构件在同一轴线处,两个转动副。推理:推理:m个构件时,有个构件时,有m 1个转动副。个转动副。
9、 第34页/共46页惯性筛机构惯性筛机构C处为复合铰链处为复合铰链计算中注意观察是否有复合铰链,以免漏算转动副数目,出现计算中注意观察是否有复合铰链,以免漏算转动副数目,出现计算错误。计算错误。n = 5, Pl = 7, Ph = 0= 35 -27 0 = 1F = 3n - 2Pl Ph第35页/共46页滚子的转动自由度并不影响整个机构的运动,属滚子的转动自由度并不影响整个机构的运动,属局部自由度局部自由度。 计入局部自由度时计入局部自由度时 n = 3, Pl = 3, Ph = 1 F =33 - 2- 1 = 2 与实际不符与实际不符第36页/共46页 应除去局部自由度,即应除去局
10、部自由度,即把滚子和从动件看作一个构把滚子和从动件看作一个构件。件。处理方法处理方法 实际结构上为减小摩擦采用局部自由度,实际结构上为减小摩擦采用局部自由度,“除去除去”指计算中不计入,指计算中不计入,并非实际拆除。并非实际拆除。N = 2, Pl = 2, Ph = 1, F = 32 - 22 1 = 1与与实际相符实际相符第37页/共46页n = 4, Pl =6, Ph = 0 虚约束虚约束:构件构件5给机构引入三个自由度,四个约束。多出给机构引入三个自由度,四个约束。多出的一个约束对机构的运动不起独立的限制作用,是虚约束。的一个约束对机构的运动不起独立的限制作用,是虚约束。 与实际不
11、符与实际不符 F = 34 -26 0 = 0第38页/共46页n = 3, Pl =4, Ph =0F = 33 - 24 0 = 1处理方法处理方法与实际相符与实际相符 应除去虚约束,即应除去虚约束,即将产生虚约束的构件将产生虚约束的构件5及运动副除去不计。及运动副除去不计。第39页/共46页计算中应将产生虚约计算中应将产生虚约束的构件及运动副一起束的构件及运动副一起除去不计。除去不计。1.两构件两点间未组成运动两构件两点间未组成运动副前距离保持不变,两点间副前距离保持不变,两点间用另一构件连接时,将产生用另一构件连接时,将产生虚约束。虚约束。第40页/共46页虚约束常见情况及处理虚约束常
12、见情况及处理 计算中只计入一个移动副。计算中只计入一个移动副。 2.两构件组成多个移动副,且导路相互平行或重合时,只两构件组成多个移动副,且导路相互平行或重合时,只有一个移动副起约束作用,其余为虚约束。有一个移动副起约束作用,其余为虚约束。第41页/共46页 3. .两构件组成多个转两构件组成多个转动副,且轴线重合,动副,且轴线重合,只有一个转动副起约只有一个转动副起约束作用,其余为虚约束作用,其余为虚约束。束。 虚约束常见情况及处理虚约束常见情况及处理 计算中只计入一个转动副。计算中只计入一个转动副。第42页/共46页 4. .两构件组成多个平面髙两构件组成多个平面髙副,当接触点的公法线彼副
13、,当接触点的公法线彼此重合,只有一个平面髙此重合,只有一个平面髙副起约束作用,其余为虚副起约束作用,其余为虚约束。约束。 虚约束常见情况及处理虚约束常见情况及处理 计算中只计入一个平面髙副。计算中只计入一个平面髙副。ADCBFEGHI第43页/共46页计算中应将对称部分除去不计。计算中应将对称部分除去不计。 5.机构中对运动不起独立作用的对称部分,将产生虚约束。机构中对运动不起独立作用的对称部分,将产生虚约束。第44页/共46页虚约束对机构的影响虚约束对机构的影响机构中虚约束是实际存在的,计算中所谓机构中虚约束是实际存在的,计算中所谓“除去不计除去不计”是从运动观是从运动观点分析做的假想处理,并非实际拆除。点分析做的假想处理,并非实
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 《医院合作医疗》课件
- 《中华茶艺与文化》课件
- 课件:人格尊严的法律保护与实践教学指导
- 快乐的有效沟通技巧
- 薪资福利政策
- 2025年昌吉货运从业资格考题
- 营口理工学院《生物材料表界面工程》2023-2024学年第二学期期末试卷
- 辽宁地质工程职业学院《邮政快递软件设计》2023-2024学年第一学期期末试卷
- 玉溪农业职业技术学院《生化与分子生物学实验》2023-2024学年第二学期期末试卷
- 山西电力职业技术学院《实验诊断F》2023-2024学年第二学期期末试卷
- 工程师评审代办合同协议
- 小班健康活动:我会吃鱼
- 专利代理师考试题库含答案2024
- DB12 T1230-2023 政务信息资源共享 总体框架
- 管道拆除专项施工方案
- 广西壮族自治区马山县实验高中-双休背后:从“要我学”到“我要学”的转变-高三家长会【课件】
- GB/Z 27021.13-2025合格评定管理体系审核认证机构要求第13部分:合规管理体系审核与认证能力要求
- 湖南省长沙市四大名校2024-2025学年高三2月月考语文试题(原卷版+解析版)
- 《政府采购管理研究的国内外文献综述》5500字
- 糖尿病护理查房提出问题
- 2024年国网浙江省电力有限公司招聘考试真题
评论
0/150
提交评论