



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
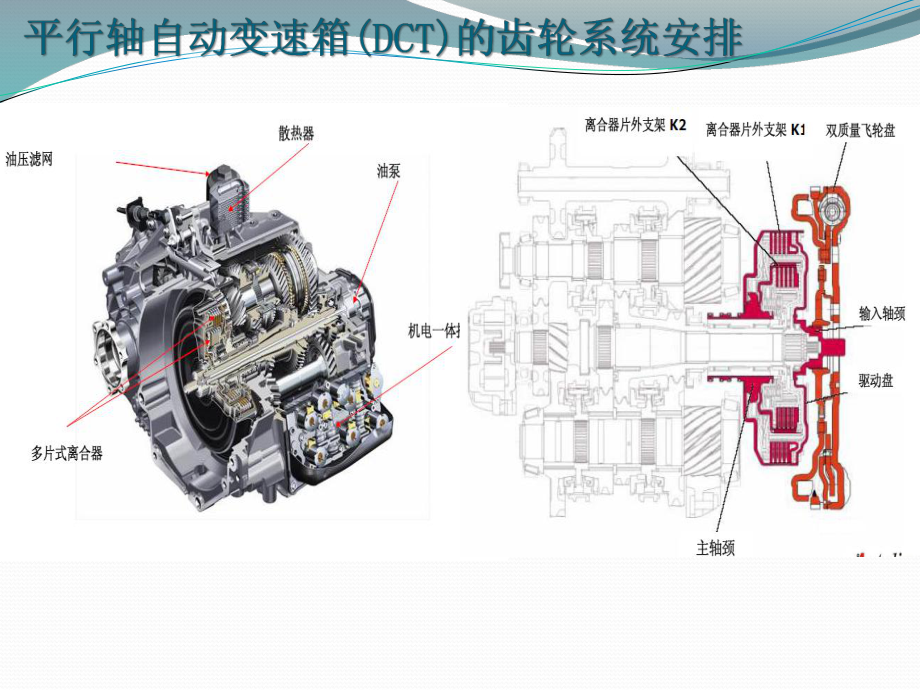
1、 概概述述 - -目目的与笵的与笵围围 自动齿轮变速箱齿轮比的计算自动齿轮变速箱齿轮比的计算法法a a) ) 平行轴齿轮平行轴齿轮组组b b) ) 行星轴齿轮行星轴齿轮系系 表格表格法法 杠杆比例杠杆比例法法 机构学分析机构学分析法法 以上三种计算法的优劣比较以上三种计算法的优劣比较 总结总结 1.5 Hrs概概述述: : 如前所述如前所述,全球目前现有及未来的自动齿轮变速全球目前现有及未来的自动齿轮变速箱箱,除除了了AMT 及及DCT是平行轴外是平行轴外, 其它大部份均以行星齿轮为主其它大部份均以行星齿轮为主导导, 而而平行轴的齿轮组的总齿轮平行轴的齿轮组的总齿轮比比(输输入入/输输出出)的
2、的计计算算, 基本上比起行基本上比起行星齿轮速比要简易的星齿轮速比要简易的多多, 而且换档离合器机构的排列及选择也而且换档离合器机构的排列及选择也是如是如此此. 鉴之于此鉴之于此, 此课程的主要对此课程的主要对象象,也也因之针对着行星齿轮系统因之针对着行星齿轮系统的结构需求而制的结构需求而制定定. 齿速齿速比比(i)= -从动轮齿从动轮齿数数 (T2 x T4 x.xTn-1) 主动轮齿数主动轮齿数 (T1 x T3 x.xTn) A)A) 通常使用的行星齿通常使用的行星齿轮系统轮系统 单行星组系单行星组系 双双行星组系行星组系 台阶式行星系台阶式行星系 RavignauxRavignaux
3、行星行星系系 (Step Pinion)B) B) 非常用行星歯非常用行星歯轮轮系统系统 双双太阳太阳轮轮- - 双行星双行星轮轮 (DS-DP)(DS-DP) 双内齿双内齿轮轮- - 双行星双行星轮轮 (DR-DP(DR-DP)P2P1P2P1S1 R1R2长轴行星齿一般行星齿轮组, 当使用于转动扭力/速度时, 下列的构件中之一必须紧固不动(Held/Ground), 而其余的两个构件则可分别作为输入(Input)以及输出(Output)端: 太太阳轮阳轮(S), 行星支架行星支架 (PC) 及内齿轮及内齿轮(R) 差动(differential) 太阳轮 (S)行星支架(PC)内齿轮 (R
4、)行星轮 (P)v 齿齿轮轮比比 (Gear Ratio)的的计计算算, 尤其在面临多档行星尤其在面临多档行星齿齿 轮轮系统的设计系统的设计时时.较平行轴较平行轴(Parallel/Counter Shaft) 齿轮齿轮系要复杂的系要复杂的多多v 齿轮齿轮比比(Gear Ratio)较受限制较受限制v 内齿轮及行星支架的设计及制造工艺较困内齿轮及行星支架的设计及制造工艺较困难难, 成成本本 也也高高v 多档行星齿轮系统构件的安多档行星齿轮系统构件的安装装组合组合及及动动力力(功率功率)流流 程程(Power Flow)的选的选择十分复择十分复杂杂, 不不易掌易掌控控v 传动构件的测试台架设计较
5、复杂传动构件的测试台架设计较复杂v 换档机构的分换档机构的分析析.及及控制系统及仿真模拟较复控制系统及仿真模拟较复杂杂v 其地因其地因素素- 投资成投资成本本, 人力资源等的考量人力资源等的考量 SurveyA) A) 表格表格法法( (TABULATION METHOD)TABULATION METHOD)a) 单一行星齿轮组b) 双行星齿轮组 c) 复合式(Compound) 行星齿轮系 辛普森行星齿轮系统(Simpson Gear Train) Ravignaux 行星齿轮系统a) a) 单一的行星齿轮单一的行星齿轮组组 表格计算法表格计算法构件构件( (齿轮比齿轮比) )行星轮速行星轮
6、速 (= P- C)(= P- C) ( (相讨干行星支架速度相讨干行星支架速度) )S SC CR RP P1 10 0- S / R- S / R- -S / PS / P- S / P- S / P 対以上每个行格乘以対以上每个行格乘以 “ “- R/S” - R/S” 值值 - R / S - R / S0 01 1R / PR / PR / PR / P 対以上每个行格対以上每个行格 加以加以 “ “- 1” - 1” 值值-(R+S-(R+S) /) /S S-1-10 0( (R - P) / PR - P) / P R / P R / P 対以上每个行格乘以対以上每个行格乘以
7、“ “ S / (S / (R+SR+S)” )” 值值1 1S / (S / (R+S)R+S)0 0- S / (R - P) / ( P (R + S- S / (R - P) / ( P (R + S) )- RS / (P (R + S- RS / (P (R + S) ) 対以上每个行格加対以上每个行格加 以以 “ “- - 1 1” ” 值值0 0-R/(R+S)-R/(R+S)-1-1-R (S-P) -R (S-P) / (P (R+S) / (P (R+S)RSRS/( /(P(R+S)P(R+S) 対以上每个行格乘以対以上每个行格乘以 “ “ (R+S) / R ” (R
8、+S) / R ” 值值0 01 1(R+S)/R(R+S)/R(S-P) / P(S-P) / PS/PS/P单一行星齿轮比计算总结表单一行星齿轮比计算总结表轮入轮入(I)(I)紧固紧固(G)(G)输出输出( (O)O)轮出轮出 / /输入输入 速度比速度比行星齿速度比行星齿速度比( (相対行星支架相対行星支架) ) Sun = 1Carrier=0Ring- S/R-S/PSUN = 1Ring =0CarrierS/(R+S)R/PRING = 1Sun =0CarrierR/(R+S)R/PRING = 1Carrier=0Sun- R/S- RS /(P(R+S)Carrier= 1
9、Sun =0Ring(R+S)/RRS / (P(R+S)Carrier= 1Ring =0Sun(R+S)/SS/P构件构件行星速度比行星速度比( (相対行星支架相対行星支架) ) S SC CR RP1P1P2P2= P1 C= P1 C= P2 - C= P2 - C1 10 0S / RS / R- S /P1- S /P1S / P2S / P2- S / P1- S / P1S / P2S / P2 対以上每个行格乘以対以上每个行格乘以 “ “ R / S ” R / S ” 值值 R / SR / S0 01 1- R / P1- R / P1R / P2R / P2- R /
10、P1- R / P1R / P2R / P2 対以上每个行格対以上每个行格 加以加以 “ “- 1” - 1” 值值(R-S(R-S) / S) / S-1-10 0 - (R + P1) / P1 - (R + P1) / P1( (R - P2) / P2R - P2) / P2- (R + P1 ) / P1- (R + P1 ) / P1(R - P2) / P2(R - P2) / P2 対以上每个行格乘以対以上每个行格乘以 “ “ S / (R - S) ” S / (R - S) ” 值值1 1- S /(- S /(R-S)R-S)0 0- S (- S (R+P1)/(P1(
11、R-S)R+P1)/(P1(R-S) S(R-P2 S(R-P2)/(P2(R-S)/(P2(R-S)- RS / (P1 (R - S- RS / (P1 (R - S) )RS / (P2 (R-SRS / (P2 (R-S) ) 対以上每个行格加対以上每个行格加 以以 “ “ - - 1 1 ” ” 值值0 0-R/(R-S)-R/(R-S)-1-1- (R(S+P1) /(- (R(S+P1) /(P1(R-S)P1(R-S)R(S-P2)R(S-P2) / (/ (P2(R-S)P2(R-S)- RS / (P1(R-S)- RS / (P1(R-S)RS / (RS / (P2(R
12、-SP2(R-S) ) 対以上每个行格乘以対以上每个行格乘以 “ “ (R - S) / R ” (R - S) / R ” 值值0 01 1( (R-SR-S) /) /R R(S+P1) / P1(S+P1) / P1-(S-P2) / P2-(S-P2) / P2(S+P1) / P1(S+P1) / P1-(S-P2) / P2-(S-P2) / P2双行星齿轮比计算总结表双行星齿轮比计算总结表输入输入(I)(I)紧固紧固(G)(G)输出端输出端(O)(O) 速度比速度比行星行星1 1速度比速度比( (相対行星支架相対行星支架) ) 行星行星2 2速度比速度比( (相対行星支架相対行星
13、支架) ) Sun = 1Carrier=0RingS / R-S / P1S / P2SUN = 1Ring =0Carrier-S / (R-S)- RS / (P1 (R - S)RS / (P2 (R-S)RING = 1Sun =0CarrierR / (R-S)RS / (P1(R-S)-RS / (P2(R-S)RING = 1Carrier=0SunR / S-R / P1R / P2Carrier = 1Sun =0Ring (R-S) / R(S+P1)/P1-(S-P2)/P2Carrier = 1Ring =0Sun -(R-S ) / S(R+P1) / P1- (R
14、 - P2) / P2b) b) 双行星齿轮组双行星齿轮组 表格计算表格计算法法C实实例例 - - 辛普辛普森森(Simpson) (Simpson) 行行星齿星齿轮系轮系统统 - - 使用两个单一行星组使用两个单一行星组 来来合成一个复合式的齿轮系统合成一个复合式的齿轮系统S2 /(S2+R2) =DB) B) 杠杆比杠杆比例法例法( (LEVER DIAGRAM METHOD)LEVER DIAGRAM METHOD)a) 单一行星齿轮组b) 双行星齿轮组 c) 复合式(Compound) 行星齿轮系 辛普森行星齿轮系统(Simpson Gear train) Ravignaux 行星齿轮
15、系统三种常三种常用齿用齿轮轮比比(Gear Ratio)的计算方的计算方法法 a) a) 杠杆比例计算杠杆比例计算法法 - - 单一行星齿轮单一行星齿轮组组内齿轮RPinion大阳轮(S)PCRPC S S R需要三道力量以达到杠杆上的平衡即: 输入(I), 输出(O) 及紧固力G) IOGOGIGO I OIGIGOGI O 6 种可行的速度比排列 又 T.R = 1 / S.R. 杠杆2022-4-2915单一行星齿轮比总结单一行星齿轮比总结 - 杠杠杆比例法杆比例法PC R SIOGOGIGO I OIGIGOGI O 内齿轮RP2太阳齿(S)P1PC S Rb) b) 杠杠杆比例计算法
16、杆比例计算法 - - 双行星齿轮组双行星齿轮组PC2022-4-2917双行星齿轮比总结双行星齿轮比总结 - 杠杆比例法杠杆比例法C) C) 复合式系统齿轮比复合式系统齿轮比 - - 杠杆比例计算法杠杆比例计算法实实例例 1 1 - - 辛普森辛普森(Simpson) (Simpson) 行星齿行星齿轮系统轮系统 - - 使用两个单一行星组使用两个单一行星组 来来合成一个复合式的齿轮系统合成一个复合式的齿轮系统杠杆比例法杠杆比例法R1C1S1R2C2S2K1S1K1R1K2S2K2R2K1R1 =K2(S2+R2)K2 = K1R1 /(S2+R2) K1S1K1R1S2/(S2+R2)K1R
17、1R2/(S2+R2)R1C1/R2C2S1/S2由由 K2 転换到転换到 K1设计要求 (R/S=?)R1/ S1 = C1R2/S2 = C22022-4-2919 K1S1K1R1S2/(S2+R2)K1R1R2/(S2+R2)R1C1/R2C2S1/S2实例实例 一一 辛普森行星齿轮系统速度比总结辛普森行星齿轮系统速度比总结运転条件系依上图所示2022-4-2920,ChainC C) ) 机构学分析法机构学分析法( (KINEMATIC ANALTICAL KINEMATIC ANALTICAL METHOD)METHOD)a) 单一行星齿轮组b) 双行星齿轮组 c) 复合式(Com
18、pound) 行星齿轮系 辛普森行星齿轮系统(Simpson Gear Train) Ravignaux 行星齿轮系统 (见附件)三种常用的齿轮三种常用的齿轮比比(Gear Ratio)计计算方算方法法工工程术语程术语 ( Nomenclature)代码符号代码符号D= 齿轮节圆齿轮节圆 (Pitch Diameter)M= 模数模数 ( 法向法向)- Normal Module R ( 半径半径 mm) V (瞬瞬 时的速度时的速度) - (M/S)RRi= 内齿轮节圆半径内齿轮节圆半径 ( I = 1,2,3)VRi= 内齿轮速度内齿轮速度 ( I = 1,2,3)RPi= 行星齿轮节圆半
19、径行星齿轮节圆半径 ( I = 1,2,3)Vpi= 行星齿轮速度行星齿轮速度 ( I = 1,2,3)RSi= 太阳轮节圆半径太阳轮节圆半径 ( I = 1,2,3)VSi= 太阳轮速度太阳轮速度 ( I = 1,2,3)RCi= 行星支架半径行星支架半径 ( I = 1,2,3)VCi= 行星架速度行星架速度 ( I = 1,2,3) Z ( 齿数齿数) w w ( 角速度角速度 - Radian /S) ZRi= 内齿轮齿数内齿轮齿数 ( I = 1,2,3)w wRi= 内齿轮角速度内齿轮角速度 ( I = 1,2,3)ZPi= 行星齿轮齿数行星齿轮齿数 ( I = 1,2,3)w w
20、Pi= 行星齿轮角速度行星齿轮角速度 ( I = 1,2,3)RSi= 太阳轮齿数太阳轮齿数 ( I = 1,2,3)w wSi= 太阳轮角速度太阳轮角速度 ( I = 1,2,3) T ( 力矩力矩 N-m)w wCi= 行星架角速度行星架角速度 ( I = 1,2,3)TRi= 内齿轮所承受力矩内齿轮所承受力矩 ( I = 1,2,3) n ( 転速転速 -RPM )TCi= 行星支架所承受的力矩行星支架所承受的力矩 ( I = 1,2,3)nRi= 内齿轮速度内齿轮速度 ( I = 1,2,3)TSi= 太阳轮所承受的力矩太阳轮所承受的力矩 ( I = 1,2,3)nPi= 行星齿轮速度
21、行星齿轮速度 ( I = 1,2,3) F ( 传动力传动力, Newtons)nSi= 太阳轮速度太阳轮速度 ( I = 1,2,3)FRi= 内齿轮所受的传动力内齿轮所受的传动力 ( I = 1,2,3)nCi= 行星架速度行星架速度 ( I = 1,2,3)FCi= 行星支架所受的传动力行星支架所受的传动力 ( I = 1,2,3) FSi= 太阳轮所受的传动力太阳轮所受的传动力 ( I = 1,2,3)I = 1, 2, 3 ; 乃系乃系各行各行星齿轮组的代号星齿轮组的代号 旋転 角速度(w) 方向性的识别 CCW “-” CW”+” 速度 ( V ) 方向性的识别- +2022-4-
22、29232022-4-2924 内齿轮行星轮太阳轮着地紧固 以下的程序系导引速度方程式的规则 - 单行星齿轮组: 1. 紧固内齿轮或太阳齿, 仅让非紧固的齿轮作 为输入件,同时也使行星架能自由転动.以此 导出输入轮和行星轮之间的速度 关系式 (方程式 1), 此方程式中应包含 行星架的転速; 方程式的速度矢量应 和転动方向互相吻合. 2. 重复第一步骤, 但替换上述的紧固件及输入件 (方程式 2). 3. 从以上两个方程式中去除行星轮的速度, 即可 得到各运転主件之间的速度关系, 即输出 / 输入 的速度比来. 4. 当各运転主件的速度犾取後,行星齿轮的速度则 可由方程式 1 或 2 中取得.
23、 图示 12022-4-2925因为R = Z / 2 x M; 此処 Z 为齿数, M为齿轮模数 (4)将(4) 代入以上(1), (2) (3) 方程式中, 可得行星齿轮组各転动元件的关系式单一行星齿轮组各构件的転速关系式单一行星齿轮组各构件的転速关系式 w wR x ZR = w wP x ZP + w wC x ZR(5) w wS x ZS = - w wP x ZP + w wC x ZS (6) w wR x ZR + w wS x ZS = w wC ( ZR + ZS )(7)2022-4-2926根据以上的方程式导引规则2022-4-2927根据以上的方程式的异演规则根据以
24、上的方程式的异演规则:各构件的速度关系式各构件的速度关系式各构件的力矩关系式各构件的力矩关系式 w wR x ZR = w wP1 x ZP1 + w wC x ZR (1)Ti ( Input) = 1 (1) w wS x ZS = - w wP2 x ZP2 + w wC x ZS (2)To (Output) = - 1/ w wO (2) w wR x ZR - w wS x ZS = w wC ( ZR - ZS ) (3)TR (Reaction) = - ( Ti + TO) (3) - w - wP1 x ZP1 = w wP2 x ZP2 (4)案例案例123456与输入件
25、的速度比与输入件的速度比 (S/R)输入输入 (I)Sun(S)SunRingRingCarrierCarrier输出输出 (O)Ring(R)CarrierSunCarrierRingSun紧固紧固 (G)Carrier(C)RingCarrierSunSunRing输入件速度输入件速度(设定为设定为 1.0)TSun = 1TSun = 1T Ring = 1T Ring = 1TCarrier = 1TCarrier = 1由由 (3) 得到与输入件得到与输入件的速度比的速度比wC = 0wR = 0wC = 0wS = 0wS = 0wR= 0 (ZS / ZR)ZS / (ZR +
26、ZS) ( ZR / ZS ) ZR / (ZR - ZS ) (ZR - ZS) / ZS - (ZR - ZS) / ZS 由由(1) 式得到式得到 P1行星轮的速度比行星轮的速度比wC = 0wR = 0wC = 0wS = 0wS = 0wR = 0 - (ZS / ZP1 ) - (ZR / ZP1) x ZS / (ZR-ZS) - (ZR / ZP1) - (ZS / ZP1) x ZR / (ZR-ZS) ( ZS + ZP1)/ZP1( ZR + ZP1)/ZP1由由(2) 式得到式得到 P2行星轮的速度比行星轮的速度比 (ZS / ZP2 ) (ZR / ZP2) x ZS
27、 / (ZR-ZS) (ZR / ZP2) (ZS / ZP2) x ZR / (ZR-ZS) -( ZS - ZP2)/ZP2-( ZR ZP2)/ZP2 与输入件的力矩比与输入件的力矩比 (T/R)输入件的力矩输入件的力矩(设定为设定为 1.0)TSun = 1TSun = 1T Ring = 1T Ring = 1TCarrier = 1TCarrier = 1输出力矩比输出力矩比 = - 1 / w woutput ZR / ZS( ZR - ZS)/ ZS ZS / ZR (ZR+ ZS) / ZR ZS / ( ZR - ZS) ZS / (ZR-ZS) 紧固件力矩比紧固件力矩比=
28、 - (Ti +To) - (1 + ZR / ZS) -( 1+( ZR - ZS)/ ZS) - (1 + ZRS /ZSR) - (1 + (ZS+ZR) / ZR)-(1+ZS / ( ZR - ZS)- (1+ZR / ( ZR -ZS)题示题示:Ti + TO +TR = 0PC w wR1 x ZR1 + w wS1 x ZS1 = w wC1 ( ZR1 + ZS1 ) (1) w wR2 x ZR2 + w wS2 x ZS2 = w wC2 ( ZR2 + ZS2 ) (2) 由由于于 构件联构件联结结, , 所所以以 w wS1 = w wS2 , w wc1 = w w
29、R2 (3) 各组行星轮的速度各组行星轮的速度比比( S/R)及及力矩力矩比比 (T/R)也也可用单一行可用单一行 星星组的方程式得到组的方程式得到 该行星齿轮系统系由两组单一行星齿轮组复合而成同样根据以上的方程式异演规则:题示题示: 构件构件 D (即行星即行星架架C2) 在仼何各运転情况下均需制定为输出件在仼何各运転情况下均需制定为输出件输出输出2022-4-2929输出输出 表表格法格法 杠杆比例法杠杆比例法 理理论分析法论分析法优优奌奌: 容易跟踪了解 - 容易建立计算模式 - 理论清晰明了 容易查误 - 容易操作及演示 - 用法简易 便于简单行星组 - 便于较复杂的多组 - 可用于建
30、立电 的计算(手算即可) 行星系组计算分析 脑程式 弱奌弱奌: 不利于多组的行星 - 需花时间学习-新入者 - 需花时间建立系统的演算(太复杂) - 花时间换算比例尺寸 统及导方程式 - 不易计算行星轮(Pinion) 的速度 为了便于课题的讲解及演为了便于课题的讲解及演示示, 我们须遵照下列的一些设定笵围的我们须遵照下列的一些设定笵围的限限制制: 在此课题上,我们将使用上面提及的杠杆比例法(Lever Diagram) 来演示阐明汽车行星齿轮系统上的各种不同的排 列组合法 输出件(轴) 的选用及位置在仼何运行情况时必须固定不固定不 变变 在换档时不允许超过二个换档机构以上的相互递换 ( Do
31、uble clutch shifting one time is not allowed) 齿轮比的笵围已事先决定 我们将行星齿轮组限制到二组或最多三组, 以求节省讲 解时间, 并可使实例在演示时得到较为简洁明了的过程 了解.31 其中辛普森(Simpson)行星齿轮系统是最原始也是最常用来 作为演示说明复合式的杠杆比例法组合排列的题材.32 1 2 R 1 C1S1R2C2S2R2R1C2C1S1S2abc 简易支杆图简易支杆图 (Stick Diagram) 杠杠 杆杆 比比 例例 图图 (Lever Diagram)R1 R2C1 C2 S1 S2BFWCL33 因依前设立规定因依前设立
32、规定 1, 输出件输出件(奌奌) 设定後便不得仼意更变设定後便不得仼意更变, 而依规定而依规定2的需求的需求, 仅允许更换仅允许更换(Shift)输入或紧固件来获取不同齿轮比输入或紧固件来获取不同齿轮比 依上所述依上所述, 两种不同的更换方式两种不同的更换方式:即所谓的即所谓的”更换输入件更换输入件(switched-input)” 及及 “更换紧固件更换紧固件(switched-reaction)” 可用下二可用下二图来表述图来表述 根据此两种更换行星组件的方法根据此两种更换行星组件的方法, 便可组成市面上已被应用的许便可组成市面上已被应用的许多不同式样的行星齿轮多不同式样的行星齿轮(箱箱)
33、系统的排列系统的排列 可选择転移紧固件(G)的排列法 可选择転移输入件(I)的排列法紧固件紧固件(G) 紧固件紧固件(G)输输 出出( O) 特特 定定不变不变 输入输入(I)可転移可転移输输 出出( O) 特特 定定不变不变 输入输入(I)34 首先将每组行星齿轮的杠杆支架其及支奌依行星结构, 如单一或双行星组建立起来 将各组行星支奌与其他组的连结奌以直线结联起来 从各组行星轮及其联线的组合,整合出以单一支杆(如右 图所示) 的杠杆支架来 如根据前面所订立的设定规则, 即输出件(点)的位置 保持固定不变,并依仅使用一対一的离合器的原则作换 档时,某些前进档(Forward) 的齿轮比数, 其
34、中包括低(速) 档(Under Drive)高档(Over Drive), 可用以下的算法 来决定 为达到倒档(负值)的齿轮比. 紧固奌(支点)的位置须建立 在输入点及输出点之间. 就一般通式而言: 杠杆上的齿轮比,在低档(U.D.) 应有 n 2 个, 而高档(O.D) 及倒档则各有n-3 个, 同时并可 加上一个直接档( Direct Drive), 以增加档数(Bonus). 支奌(Node -n)输出13所以可获得的支奌数(n) 可以用下列的方程式来计算: 在低档 (Under Drive) 比时; NUD = n-2 在直接档(Direct Drive)比时; NDir = 1 在高
35、档 (Over-drive) 比时 ; NOD = n-3 在倒档(Revers) 时 ; N Rev = n-3 所以前进档数 (N ) = NUD +1 +NOD = 2n -4 ; 或 n = N /2 +2譬如:五(前进)速的变速箱, 其支奌数为: n = 5/2 +2 =4.5 - 5.0 (整数值)-题示题示: 某些五个支奌的杠杆上某些五个支奌的杠杆上, 也可体现出六速的可能性也可体现出六速的可能性.36就如前所示, 利用杠杆比例法优点即是可依照不同的杠杆尺寸或比例的排列,便可觅求到适当的齿轮比(Gear Ratio), 其比例关系也可用以下的公式来表示: DxDx = = LxL
36、xININ / / LxLxOUTOUT, 此处: Dx = 齿轮比 LxIN = 从输入奌到紧固支奌的尺寸(通常可用 1.0 来表示, 以简化计 算). LxOUT = 从输出奌到紧固支奌的尺寸.计算杠捍尺寸的规则计算杠捍尺寸的规则:1. 因杠杆的尺寸中需求出n-1个来, 故有n-1个方程式待设定2. 而输入值已设定为1.0, 故留下 n-2 个方程式(尺寸)待设定3. 从n-2个方程中我们可求得n-2个齿轮比, 然而为侭可能求得适当的齿轮比,所有的杠杆尺寸则均须顾及到.37 例案例案 : : 譬如以四速变速箱为例: 其要求的大约齿轮比(Dx) 列之如下, 我们在此用以上所述们杠杆比例法逐步
37、的来演示如何得到一个适当可行的四速行星变速箱:D1 = 3.0, D2 = 1.90; D3 = 1.0; D4 = 0.70, and DREV = -2.25步骤 一 因依前规定,输出支奌的构件及位置必须首先选定, 同时按齿轮比的要求, 第三档 即D3 = 1.0. 此时我们可从其他三档中选出二个独立且比较关键的齿轮比, 如D1和D4 来决定杠杆的尺寸,由此D2以及DRev也可随之而决定 如下页的二图所示, 即使用以上提及的输入和紧固奌交替更换的方式 (Input Switch) 和 (Reaction Switch):38 更换紧固件方式更换紧固件方式 更换输入件方式更换输入件方式 a
38、b=1.00 cD1 = 3.0 = (a + b) / b ; D4 = 0.70 = c / ( b + c) a = 2.00 b , 而 b = 0.43 c; c = 2.33 b 如设定 b = 1.00 ; 则 a = 2.00 ; c = 2.33 , 所以:D2 = ( a+b+c) / (b+c) =1.60 ; D3 = 1.00DREV = c/b = 2.33 D1 = 3.0 = (a + b + c) / a ; D4 = 0.70 = c / ( b + c) 因 a = 1.67 ; b = 1.00 ; c = 2.33 , 所以: D2 = ( a + b
39、) / a =1.60; D3 = 1.00 DREV = c/b = 2.33输出固定不娈结论结论: 从以上两种不同方式得知其杠杆尺寸, 即 a, b 及 c 等会有不同的结果, 但是其齿轮比(Gear Ratios), 却不会因之而改变.39例案例案 步骤步骤 2 用以上的排列, 如以二组行星齿轮组来设立四个支点的杠杆而言,则可达到12个不同的组合(4C2), 但其中仅有三个可实用於己経生产的大部份四速自动变速箱中; 因为 1) 有些排列旡法完会满足齿轮比的需求, 2) 没有足够空间,或因位置的限制来安置具有足够性能(endured)的离合噐或相关的构件 由此可想,对於三个行星组以上的多档
40、变速箱, 其面临的难题则可能更为严峻. 为了有效的在复杂的行星齿轮系统的排列组合上作适当可行的筛选, 以减少旡谓的时间及精力,在此对其中一项常用而有效的方法,即所谓行星系统的”轮廓 (Silhouette)布局法”, 给诸位作些初步的介绍.行星组合系统的轮廓布局(Silhouette Approach): 从两个行星齿轮来迖成四档的功能可以用下面数种典型的杠杆的组合及排列法来显示. 藉此布局我们可从上节所提到的12种排列中减化到4种. 对于更多档的行星轮系统,此法的助益则更可覌, 如三个行星组系统可从原先 288 个减化到 40个可用的组合.40例案 步骤 3S1S2/R1R2 S1S2/C1
41、C2 S1C2/C1S2 R1R2/C1C2R1S2/R1S2 R1R2/C1C2 R1C2/C1S2 R1S2/S1C2 R1S2/C1C2 R1C2/C1R2 R1S2/C1R2 S1S2/R1C2 行星组轮廓(Silhouette) 在尺寸上的重新划定: 为 了建立相应的杠杆比例架构 ,行星组轮廓(Silhouette) 在尺寸上须作的重新划定. 譬如使用前面题及的 两 种 更 换 ( Switch-Input & Switch Reaction )方式, 佐以下图来显示四速(档)的杠杆排列组合, 41 案例 步骤 41.671.002.33 A B C D E F G H2.3
42、31.001.67案例 步骤 5 42 依据实际经验, 一般 AT 行星齿轮箱的内齿轮和太阳齿轮的齿数比大约処于以下的笵围: 1.5 ZR / ZS 2 低档之间, 随着挡位增加, 齿输比差距也逐渐减小, 这种进展的方法可由下图中显示出. 由於此齿轮比差速曲线很近对数曲线, 故以此来命名. 至於如何应同此法 来导算目前的案例,可由下面的公式来表示:Di = D1 x im ; 此処 “i” 是档位而” m “是相应指数如以自然对数(Nature log) 来表示上式, 则: In Di = In D1 +m x In i ; 针対我们目前案例: In Di In D1 In 0,80 In 2
43、.9 m = - = - = - 0.929 ; In i Ln 4 D2 =2.9 x 2 0.929 1.52 62 由上计算结果得知一至二档间有着相当大的齿轮比差距- 2.9/1.52=1.90, 而由下图我们也可观察到引擎速度在换档前後也有很大的差别. 就一般而言此対比进展法在齿轮比差距上较其他进展法尤为显着. 63 3. 和谐齿轮比进展法(Harmonic Progression) 此法和前面谈及仍对数进展法相似, 也是在既定的输入速度的换档差, 在各档输出速度上乘以一个固定的变化值, 所以每二档间的齿轮比差距都将改变, 齿轮比的导算法列之如下:DNo = N 0, n-1,n N0
44、,n-2,n-1 = N 0,i,i+1 N0,i-1,i = N0,3,4 N0,2,3 = N0,2,3 - N0,1,2此処: No,i-1,i 系从挡位 i-1 换挡到 I 时的输出速度, 所以: N 0, n-1,n N0,1,2 = N 0,n-1,n N0,n-2,n-1 - + N0,i,i+1 N0,i-1,i, + N0,2,3 + N 0,2,3 1;因此 No,n -1,n N 0,1,2 = (n-2) D N0因为齿轮比是 (Ne / No) 的函数值, 所以上式可転换成 N e,n-1,n N e,1,2 - - - = (n-2) DN0; D n-1 D 1又
45、因每档的引擎(或 输入速) 速度均为恒定, 和64 继续: 1 1 N e,shift ( - - -) = (n - 2) DN0 D n-1 D 1 如设定 m=n-1. 又因 DN0 仼二档间输出速差依前定义系为一恒定值, 在此可用”C” 来代表, 故上式可重新改写为: 1 1 ( - - -) = (m - 1) C D m D 1 而依我们目前的四速齿轮箱的案例, 用上诸式可算示二档齿轮比(D2) 1/Dm -1/D 1 1/0.8 -1/2.9 C = - = - = 0.302 ; m-1 3 1 1 1 1 C = ( - - -) ; - = C + -; D2 D 1 D2 D1 D2 = 1/ (C +/D1) = 1/ (0.302 + 1/2.9) = 1.55654. 平均值进展计算法(Averaging
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 关于催促付款的提醒函3篇范本
- 跨境电商营销策略及实施步骤
- 客户信用额度商洽确认函5篇
- 促销现场布置通知函(7篇)
- 科学探索兴趣激发小学主题班会课件
- 2026购物车面试题目及答案
- 智能物流仓储系统温控系统操作手册
- 川教版小学英语六年级上册单词默写表(全单元同步可打印)
- 小学主题班会课件环保理念共守望
- 2026广西消防面试题库及答案
- 新版加油站全员安全生产责任制
- 输血科院感培训课件
- 餐饮2017全年营销方案
- JGJT178-2009 补偿收缩混凝土应用技术规程
- 质量控制计划QCP
- HOLZMA电子开料锯操作培训教材讲义课件
- 人教版八年级历史下册期末知识考点复习资料
- GB/T 41679-2022农林拖拉机和机械基本类型词汇
- GB/T 7582-2004声学听阈与年龄关系的统计分布
- GB/T 3075-2021金属材料疲劳试验轴向力控制方法
- GB/T 14056.2-2011表面污染测定第2部分:氚表面污染
评论
0/150
提交评论