



下载本文档
版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、精选优质文档-倾情为你奉上实验三 线性系统的根轨迹一、实验目的1. 熟悉MATLAB用于控制系统中的一些基本编程语句和格式。2. 利用MATLAB语句绘制系统的根轨迹。3. 掌握用根轨迹分析系统性能的图解方法。4. 掌握系统参数变化对特征根位置的影响。二、实验报告1根据内容要求,写出调试好的MATLAB语言程序,及对应的结果。2. 记录显示的根轨迹图形,根据实验结果分析根轨迹的绘制规则。3. 根据实验结果分析闭环系统的性能,观察根轨迹上一些特殊点对应的K值,确定闭环系统稳定的范围。4写出实验的心得与体会。三、实验内容请绘制下面系统的根轨迹曲线同时得出在单位阶跃负反馈下使得闭环系统稳定的K值的范
2、围。一、 1、程序代码:G=tf(1,1,8,27,38,26); rlocus (G); k,r=rlocfind(G) G_c=feedback(G,1); step(G_c)2、实验结果:专心-专注-专业selected_point = -8.8815 + 9.4658ik = 1.8560e+04r = -10.2089 + 8.3108i -10.2089 - 8.3108i 6.2089 + 8.2888i 6.2089 - 8.2888iselected_point = -9.5640 - 7.6273ik = 1.3262e+04r = -9.5400 + 7.6518i -9
3、.5400 - 7.6518i 5.5400 + 7.6258i 5.5400 - 7.6258i selected_point = -0.8436 + 1.1180ik = 3.6752r = -3.1044 + 2.0194i -3.1044 - 2.0194i -0.8956 + 1.1669i -0.8956 - 1.1669iselected_point = -0.0095 + 2.1118ik = 73.9872r = -3.9617 + 2.4724i -3.9617 - 2.4724i -0.0383 + 2.1409i -0.0383 - 2.1409i3、结果分析: 根轨迹
4、与虚轴有交点,所以在K从零到无穷变化时,系统的稳定性会发生变化。由根轨迹图和运行结果知,当0<K<73.9872时,系统总是稳定的。二、 1、程序代码:G=tf(1,12,1,23,242,1220,1000); rlocus (G); k,r=rlocfind(G) G_c=feedback(G,1); step(G_c) 2、实验结果:selected_point = -11.9076 + 2.6398ik = 1.3433e+03r = 0.4698 +10.6207i 0.4698 -10.6207i -11.9698 + 2.8634i -11.9698 - 2.8634
5、iselected_point = 0.0355 + 9.7826ik = 1.0505e+03r = -11.3838 + 2.9674i -11.3838 - 2.9674i -0.1162 + 9.9146i -0.1162 - 9.9146i3、结果分析: 根轨迹与虚轴有交点,所以在K从零到无穷变化时,系统的稳定性会发生变化。 由根轨迹图和运行结果知,当0<K<1050.5时,系统总是稳定的。三、 1、 程序代码:G=tf(0.05,1,0.,0.01914,0.1714,1,0); rlocus (G); k,r=rlocfind(G) G_c=feedback(G,1)
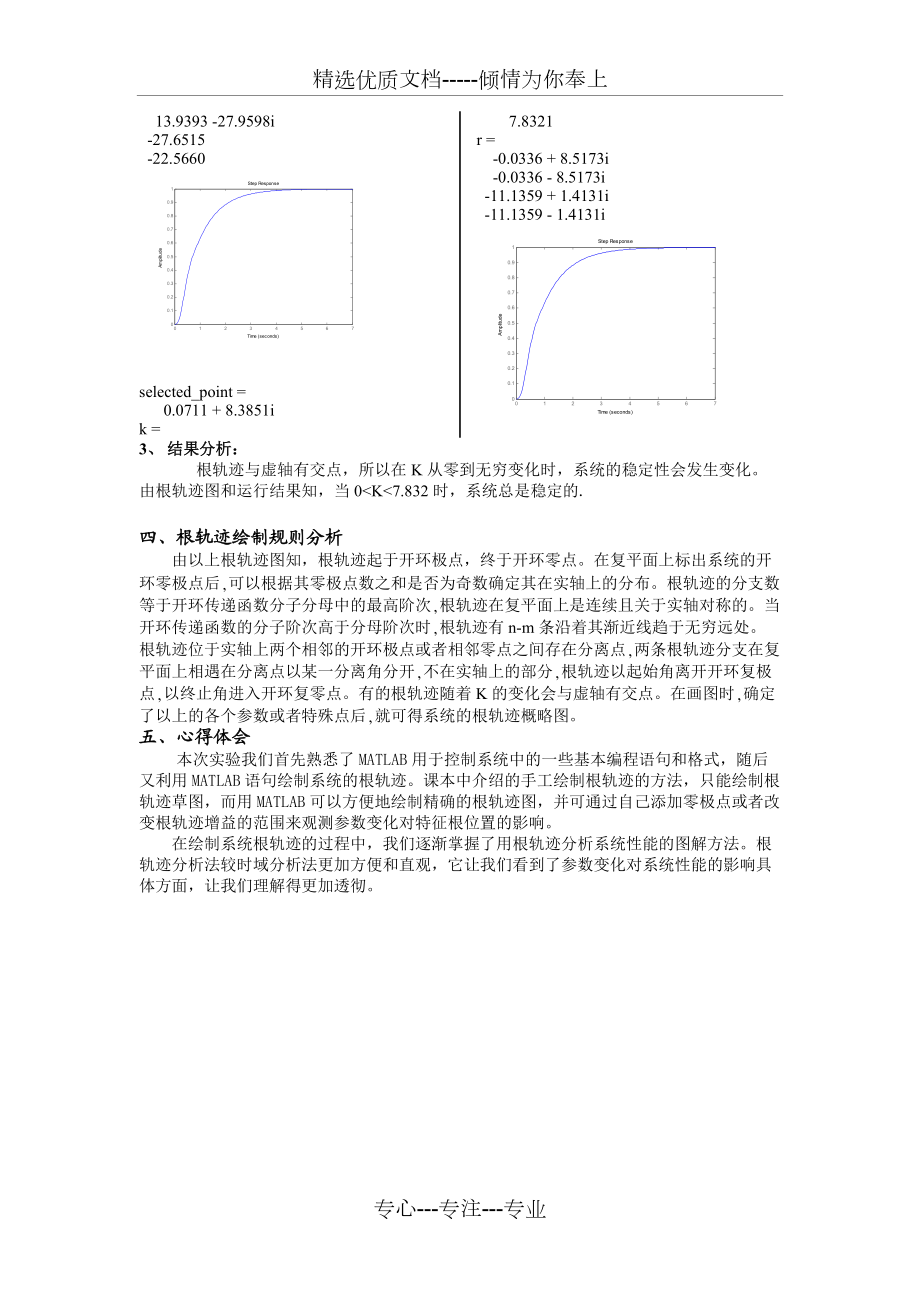
6、; step(G_c)2、实验结果:selected_point = -27.6540 + 0.1863ik = 521.8293r = 13.9393 +27.9598i 13.9393 -27.9598i -27.6515 -22.5660 selected_point = 0.0711 + 8.3851ik = 7.8321r = -0.0336 + 8.5173i -0.0336 - 8.5173i -11.1359 + 1.4131i -11.1359 - 1.4131i3、 结果分析: 根轨迹与虚轴有交点,所以在K从零到无穷变化时,系统的稳定性会发生变化。 由根轨迹图和运行结果知,
7、当0<K<7.832时,系统总是稳定的.四、根轨迹绘制规则分析 由以上根轨迹图知,根轨迹起于开环极点,终于开环零点。在复平面上标出系统的开环零极点后,可以根据其零极点数之和是否为奇数确定其在实轴上的分布。根轨迹的分支数等于开环传递函数分子分母中的最高阶次,根轨迹在复平面上是连续且关于实轴对称的。当开环传递函数的分子阶次高于分母阶次时,根轨迹有n-m条沿着其渐近线趋于无穷远处。根轨迹位于实轴上两个相邻的开环极点或者相邻零点之间存在分离点,两条根轨迹分支在复平面上相遇在分离点以某一分离角分开,不在实轴上的部分,根轨迹以起始角离开开环复极点,以终止角进入开环复零点。有的根轨迹随着K的变化会与虚轴有交点。在画图时,确定了以上的各个参数或者特殊点后,就可得系统的根轨迹概略图。五、心得体会本次实验我们首先熟悉了MATLAB用于控制系统中的一些基本编程语句和格式,随后又利用MATLAB语句绘制系统的根轨迹。课本中介绍的手工绘制根轨迹的方法,只能绘制根轨迹草图,而用MATLAB可以方便地绘制精确的根轨迹图,并可通过自己添加零极点或
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 田径夏季测试题及答案
- 职业病防护单位安全管理员日常检查安全操作规程
- 数学温度试题分析及答案
- 某化纤厂原材料采购制度
- 陶瓷厂质量检验制度
- 我的生命线心理健康教育
- 名老中医工作室验收总结
- 北京华恒智信为制造行业完善高潜人才横向能力评估体系
- 皮内注射技术常见并发症预防及处理专项考核卷
- 研学旅行综合试卷(附答案)
- 2026《煤矿重大事故隐患判定标准》解读及现场检查方法
- GB/T 14845-2026板式换热器用钛板
- 阻火器设计计算书
- 2026年硫化氢培训考试复习题练习卷含答案
- 潞安化工集团有限公司招聘题库
- 2026年中医技术操作考试模拟试卷【考点梳理】附答案详解
- 停车场场地平整及混凝土路面施工方案
- 重庆南岸区2026年九年级质量监测英语试卷试题(含答案详解)
- 2026年卫生高级职称面审答辩(中医针灸科)副高面审经典试题及答案
- 2026年深圳市盐田港集团有限公司校园招聘笔试参考试题及答案解析
- 2026年这两家事业单位正在公开选调备考题库及完整答案详解
评论
0/150
提交评论