



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
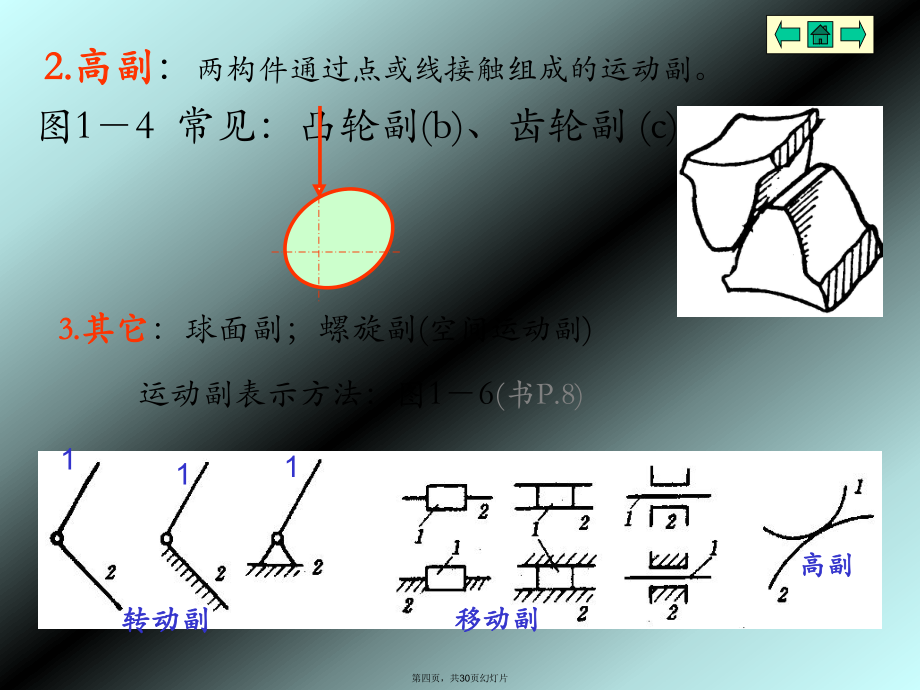
1、关于自由度和速度分析第一页,共30页幻灯片1-1 运动副及其分类(平面) P.6 机构构件通过联接运动副运动副构件之间直接接触并能产生一定 形式相对运动的(可动)联接。 运动副运动副两构件接触形式两构件接触形式 点、线接触高副高副 面接触 低副低副第二页,共30页幻灯片两构件通过面接触组成的运动副 p.6转转 动动 副副( (铰链铰链): ):移移 动动 副:副:固定铰链固定铰链:两构件中有一个是固定的两构件中有一个是固定的活动铰链活动铰链:两构件都不固定。:两构件都不固定。两构件在接触处两构件在接触处只允许相对移动。只允许相对移动。图1-3第三页,共30页幻灯片 2. 2.高副高副:两构件通
2、过点或线接触组成的运动副。图14 常见:凸轮副(b)、齿轮副 (c)3. 3.其它其它:球面副;螺旋副(空间运动副)111运动副表示方法:图16(书P.8)转动副转动副移动副移动副高副高副第四页,共30页幻灯片二二. .机构运动简图机构运动简图:12平面机构的运动简图 p.8 (平面)机构(具有确定运动)构件组成2.2.构件的表示方法构件的表示方法: 固定件(机架): 原动件(输入构件): 从动件: (线条)图17 p.8一个构件可有若干个运动副元素描述运动的参考系描述运动的参考系: :运动规律已知的构件运动规律已知的构件其余活动构件其余活动构件要研究机构首先要表达机构一一. . 构件的分类及
3、表示法构件的分类及表示法:1.1.分类分类:P.8第五页,共30页幻灯片 表达各构件相对运动关系的简单图形(表达机构运动的语言)与运动有关的因素: 1.构件数目2.运动副数目及类型3.运动副之间的相对位置表达方式:1.线条代表构件2.符号符号代表运动副3.按比例作图(区别“机构示意图”)作图步骤:作图步骤:1.1.分析结构和相对运动分析结构和相对运动 动作原理、构件数动作原理、构件数( (固定、固定、活动活动) )、运动副数及类型、运动副数及类型) )2.2.选择视图平面和比例尺选择视图平面和比例尺3.3.选择原动件的一个位置选择原动件的一个位置4.4.按表达方式作图按表达方式作图( (机构演
4、示机构演示) )二二. .机构运动简图机构运动简图:第六页,共30页幻灯片转动副转动副机架机架移动副移动副凸轮副凸轮副齿轮副齿轮副运动副用符号代表运动副用符号代表第七页,共30页幻灯片机架原动件从动件例2:作图步骤:作图步骤:1.1.分析结构和相对运动分析结构和相对运动2.2.选择视图平面和比例尺选择视图平面和比例尺3.3.选择原动件的一个位置选择原动件的一个位置4.4.按表达方式作图按表达方式作图例1:第八页,共30页幻灯片图1-9 活塞泵 p.9图(18)颚式破碎机 p.91.找固定件(1个) 、 原动件(1个) 、 从动件 2.找运动副 第九页,共30页幻灯片例5:L3作业:1-1,1-
5、3, p.16第十页,共30页幻灯片13平面机构的自由度 p.10一一. .自由构件的自由度自由构件的自由度自由构件作平面运动二二. . 运动副引入的约束运动副引入的约束: 三个自由度三个自由度(三个独立运动的可能性)自由构件作空间运动六个自由度引入两个两个约束引入一个一个约束ttnn三三. . 平面机构的自由度平面机构的自由度低副低副(转动副、移动副)高副高副第十一页,共30页幻灯片三三. . 平面机构的自由度平面机构的自由度()(F0)当原动件的数目机构有确定运动 (F=0不动;多于不确定;少于破坏)(1)计算式: (11) 活动构件数(原动件从动件) 低副数目 高副数目(2)机构具有确定
6、运动的条件:(3)计算平面机构自由度的注意事项:第十二页,共30页幻灯片K=4 ; n=3 ; pL=4 ; pH =0F=33240=1有一个机架、自由度 F0、原动件数目机构自由度数目例例7 7:有确定运动K=7 , n=71= 6 , PL = 8 , PH =1 (3与5同一构件) F=3n2PLPH=36281 =1原动件 机构有确定运动3例例6: 6:(2)机构具有确定运动的条件: p.11倒2(F=0(F=0不动;多于不确定不动;多于不确定 ; ;少于破坏)少于破坏)第十三页,共30页幻灯片1. 1.例图例图(1 (110)10) K=5, n=K1=4, PL=5, 原动件数=
7、1 F=3n2PLPH=3425=2 F F 原动件数原动件数 机构运动不确定机构运动不确定 2. 2.例图例图(1 (111)11) K=4, n=K1=3,原动件数=2 ,PL=4 F=3n2PLPH=3324=1 F F 原动件数原动件数 杆杆2 2被拉断被拉断3. 3.例图例图(1 (112) 12) F=0 F=0 机构不动机构不动K=5, n=K1=4, PL=6F=3n2PLPH=3426=02第十四页,共30页幻灯片例11:修改手动冲床的设计修改手动冲床的设计n=2,PL=3F=0n=3,PL=4, F=1减少一个约束减少一个约束增加一个自由度增加一个自由度n=2 , PL=2
8、, PH=1 F=1第十五页,共30页幻灯片(3) 计算平面机构自由度的注意事项:12123123412356F=3527=1F=3526=3?图图(1 (111)11) : :直线机构(圆盘锯)F=37260=9?F=372100=12.局部自由度3.虚约束 两个以上(m个)的构件在同一轴线上用转动副联接实际转动副个, (Lm1) 引入约束(m)1235641.复合铰链F=3527=1例例12: 12: 第十六页,共30页幻灯片2.2.局部自由度局部自由度 P.12图210某些构件的(不影响其他构件运动的)独立的运动 多余自由度计算时排出(活动构件)不计除去不计F= 3F= 33 32 23
9、 31 1 = 2 = 2 ? ?F= 3F= 32 22 22 21 1 = 1 = 1局部自由度除去不计局部自由度除去不计第十七页,共30页幻灯片对机构运动不起限制作用的重复约束3.3.虚约束虚约束 P.13两构件组成多个重复的运动副 (平行的)移动副、(轴线重合)转动副 机构中对传递运动不起独立作用的对称部分F=32231= 1?F=32221=1F=33232=1F=34244= 0?虚虚虚虚图图1 11616虚虚第十八页,共30页幻灯片解解: 1.如不考虑上述因素,解得:K=9, n=K1=8原动件数 F 机构运动不确定结论错误!2.重解重解: n=7,原动件数= F 机构有确定运动
10、PL=10,PH=1,原动件数=2 F=3n2PLPH=382101=3PL=9,PH=1F=3729 1=2123456789局虚复合例例: :图图1-17 1-17 P14P14第十九页,共30页幻灯片例例1-12 1-12 解得:8,局部自由度1个32 3821111原动件数1 机构有确定运动局局虚虚复复作业:1-10, 1-13 p.17L11, 1,虚约束1个,复合铰链1个。第二十页,共30页幻灯片利用瞬心法求简单机构的速度(速度分析)12P12V21V12( (一一) )速度瞬心及其求法速度瞬心及其求法: :瞬心瞬心绝对绝对瞬心(其中一刚体静止)相对相对瞬心(两刚体均运动) 相对运
11、动两刚体上瞬时相对速度为零的重合点具同一瞬时绝对速度的重合点2.速度瞬心的求法:作相对运动的两刚体, 任何时间总有一点的绝对速度相等相对速度=01.1.速度瞬心的意义速度瞬心的意义: :两刚体相对运动绕瞬心的转动( (二二) )瞬心在速度分析上的应用瞬心在速度分析上的应用1-4 速度瞬心及其在机构速度分析上的应用 P.14第二十一页,共30页幻灯片2.2.速度瞬心的求法速度瞬心的求法: :组成纯滚动高副组成纯滚动高副接触点是瞬心P122V211V1212P12瞬心的数目:N=K(K-1)/2 (1-2)N=K(K-1)/2 (1-2)瞬心的求法:已知两个重合点已知两个重合点的相对速度求瞬心 图
12、1-18组成转动副组成转动副转动副是瞬心 图1-19组成移动副组成移动副瞬心位于导轨垂线的无穷远处P12所有重合点的相对速度移动方向P12接触点的相对速度=0组成滑动兼滚动副组成滑动兼滚动副瞬心位于过接触点的公法线方向接触点的相对速度沿切线方向不直接接触两构件不直接接触两构件的瞬心第二十二页,共30页幻灯片不直接接触两构件的瞬心不直接接触两构件的瞬心三心定理三心定理证明证明: :123VC2VC3分析分析: : 重合点C(C2、C3)的绝对速度VC2 =VC3 假设假设: :第三个瞬心(P23)不在P12及P13的连线上, 而在C点。图1-20 (P.15) K=3 ,N=3(31)/2=3
13、作平面运动的三个构件共有三个瞬心三个构件共有三个瞬心, , 它们位于同一直线上。它们位于同一直线上。可得:P12(构件1、2) 、P13(构件1 、3)是(绝对)瞬心VC2 VC3 它们方向不可能一致 C点不可能是第三个瞬心 P23 (瞬时绝对速度的重合点)第三个瞬心应在 P12P13的连线上。P12P13C第二十三页,共30页幻灯片1234P24P13例例1-81-8:图1-21 P.15K=4 , N=43/2=6P23P34P14P12构件构件2 2、1 1、4 4 在P12P14连线上构件构件2 2、3 3、4 4 在P23P34连线上找找P24:找找P13:构件构件1 1、2 2、3
14、 3 在P12P23连线上构件构件1 1、4 4、3 3 在P14P34连线上第二十四页,共30页幻灯片例1-9:图1-22 P.16K=4 , N=4(41) /2=6找找P13:构件构件1 1、2 2、3 3 在P12P23连线上构件构件1 1、4 4、3 3 在P14P34连线上 过P14作导轨垂线找找P24:构件构件2 2、1 1、4 4 在P12P14连线上构件构件2 2、3 3、4 4 在P23P34连线上 过P23作导轨垂线A1B234CP34P24P34P13P14P12P23第二十五页,共30页幻灯片(二)瞬心在速度分析上的应用瞬心在速度分析上的应用 p.16瞬心瞬心相对速度
15、=0 , 绝对速度相等 速度分析2. 2.滑动兼滚动接触的高副滑动兼滚动接触的高副 3. 3.直动从动件凸轮机构直动从动件凸轮机构1234P12P14P23P34P24P13( (知知2 24 4) )P24是构件2、4的瞬心 两者 的同速点该点 构件2绝对速度:VE= 2LEA 构件4绝对速度:VE= 4LEDADEEAEDLL421. 1.铰链四杆机构铰链四杆机构(图1-21)两构件的角速度与其绝对瞬心至相对瞬心的距离成反比。两构件的角速度与其绝对瞬心至相对瞬心的距离成反比。 第二十六页,共30页幻灯片2. 2.滑动兼滚动接触的高副滑动兼滚动接触的高副: : (A)(B)C132P12 P13 P23nnP12 过接触点的公法线上三心定理求解图1-23(D)角速度与连心线被轮廓接触点公法线 所分割的两线段长度成反比DADBLL21用在齿轮机构(齿轮或摆动从动件凸轮机构)第二十七页,共30页幻灯片3. 3.直动从动件凸轮机构直动从动件凸轮机构(同上) 图1-24231O1V2P23P12P P1212 过接触点的公法线上 三心定理求解P P13 13 ( (回转副是瞬心
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 2025年度智能设备批量采购合同4篇
- 2025年度五星级酒店前台员工综合服务劳务合同
- 二零二五年度新能源发电站建筑工程施工合同终止协议
- 二零二五年度咖啡连锁品牌区域加盟授权合同
- 二零二五年度银行贷款居间服务与贷款条件优化合同
- 2025年房地产项目物业管理工作合同4篇
- 2025年度商业街区车位租赁及品牌推广服务合同模板4篇
- 二零二五版广告投放效果评估合同范本简易版3篇
- 2025年边坡工程智能监测系统采购合同范本3篇
- 2025年度临街商铺租赁合同租赁保证金条款2篇
- 【采购管理优化探究文献综述3000字】
- 《大学生职业发展与就业指导》课程标准
- 第23课《出师表》课件(共56张)
- GB/T 3953-2024电工圆铜线
- 发电机停电故障应急预案
- 接电的施工方案
- 幼儿阿拉伯数字描红(0-100)打印版
- 社会组织等级评估报告模板
- GB/T 12173-2008矿用一般型电气设备
- 新媒体研究方法教学ppt课件(完整版)
- 2020新版个人征信报告模板
评论
0/150
提交评论