



下载本文档
版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、吴朋1,2,时光1,聂绍忠2(1重庆大学自动化学院重庆400044;2重庆川仪自动化股份有限公司重庆401121)摘要:智能电-气阀门定位器是阀门执行机构的核心控制部件,智能阀门定位器的控制算法与控制参数的选择直接决定着定位器的性能。针对阀门对象的时变性和非线性的特性,把仿人智能控制应用于智能阀门定位器,完成了仿人智能控制器的运行控制级与参数矫正级的设计。智能阀门定位器的自检过程完成对阀门特征的辨识和仿人智能控制的参数整定,并对气体泄漏采取补偿措施,有效减小了气体泄漏所造成的不利影响。仿真与应用结果表明了该算法的有效性。关键词:智能电-气阀门定位器;时变性;非线性;自检;仿人智能控制中图分类号
2、:TP273文献标识码:A国家标准学科分类代码:510.80Application of human-simulated intelligent control insmart electro-pneumatic valve positionerWu Peng1,2, Shi Guang1, Nie Shaozhong2(1 College of Automation,Chongqing University, Chongqing400044, China;2 Sichuan Instrument Automation Co., Ltd, Chongqing 401121, China)Abs
3、tract:Smart electro-pneumatic valve positioner is the most important element of intelligent pneumatic actuators. The selection of the control arithmetic and the parameters decides the positioning performance of the pneumatic valve positioner directly. Aiming at the valve positioner, which has the ch
4、aracteristics of time-variation and nonlinear, HSIC(Human-Simulated Intelligent Control) is applied in the smart pneumatic valve positioner, and the operatingcontrol level design and parameter adjusting level design of the HSIC controller are accomplished. The identification of the characteristic of
5、 the pneumatic valve and parameter setting of HSIC are completed in the self-test process of the smart pneumatic valve positioner. Compensation measure for gas leakage is adopted to reduce the harmful effect caused by gas leakage. Simulation and application results show the effectiveness of the prop
6、osed algorithm.Key words:smart electropneumatic pneumatic valve positioner;time-variation; nonlinear; self-test; HSIC1引言收稿日期:2009-04Received Date:2009-04*基金项目:国家“863”计划(2006AA040303)资助项目近年来,随着电子信息技术和自动化技术的迅猛发展,以及现场总线和开放式总线技术的广泛应用,传统的机械式阀门定位器已经越来越不适应信息化时代的要求。国外已生产销售从机械式、电子式过渡到智能型和总线型的电气阀门定位器(以下简称智能阀门
7、定位器),其核心技术包括:具备人机交互、安装后自检自校、故障诊断与处理等功能。其中以德国SIEMENS的SIPART PS/PS2采用压电阀式工作原理的智能阀门定位器,和以美国FISHER的DVC5000、日本YAMATAKE的SVP3000采用喷嘴挡板工作原理的智能阀门定位器为代表,形成了目前国际上智能阀门定位器的主流1-4。HVP08/09是重庆川仪自主研发的基于喷嘴挡板工作原理的智能阀门定位器,其技术已经达到国际先进水平。2工作原理HVP08/09智能阀门定位器、气动执行机构与调节阀组成气动执行器,如图1所示。图1气动执行器框图Fig.1 Principle of pneumatic a
8、ctuator图1中,HVP08/09智能阀门定位器与气动执行机构组成一个闭环控制回路,阀杆位移作为被控量,位移量通过位置传感器反馈到阀门定位器的控制单元。控制单元根据位移量与给定信号值的偏差,控制电/气(I/P)转换单元的压力输出,从而控制调节阀。HVP08/09智能阀门定位器,能很好地克服摩擦力和阀芯上的不平衡力,使其定位更迅速、精确5-6。HVP08/09智能阀门定位器采用仿人智能控制。气动阀门是非线性时变对象,每个调节阀都具有各自的量程、滞后、摩擦系数和气体泄漏等特性。HVP08/09智能阀门定位器通过自检完成对阀门特性的辨识与仿人智能控制参数的整定,自检过程流程图如图2所示。图2自检
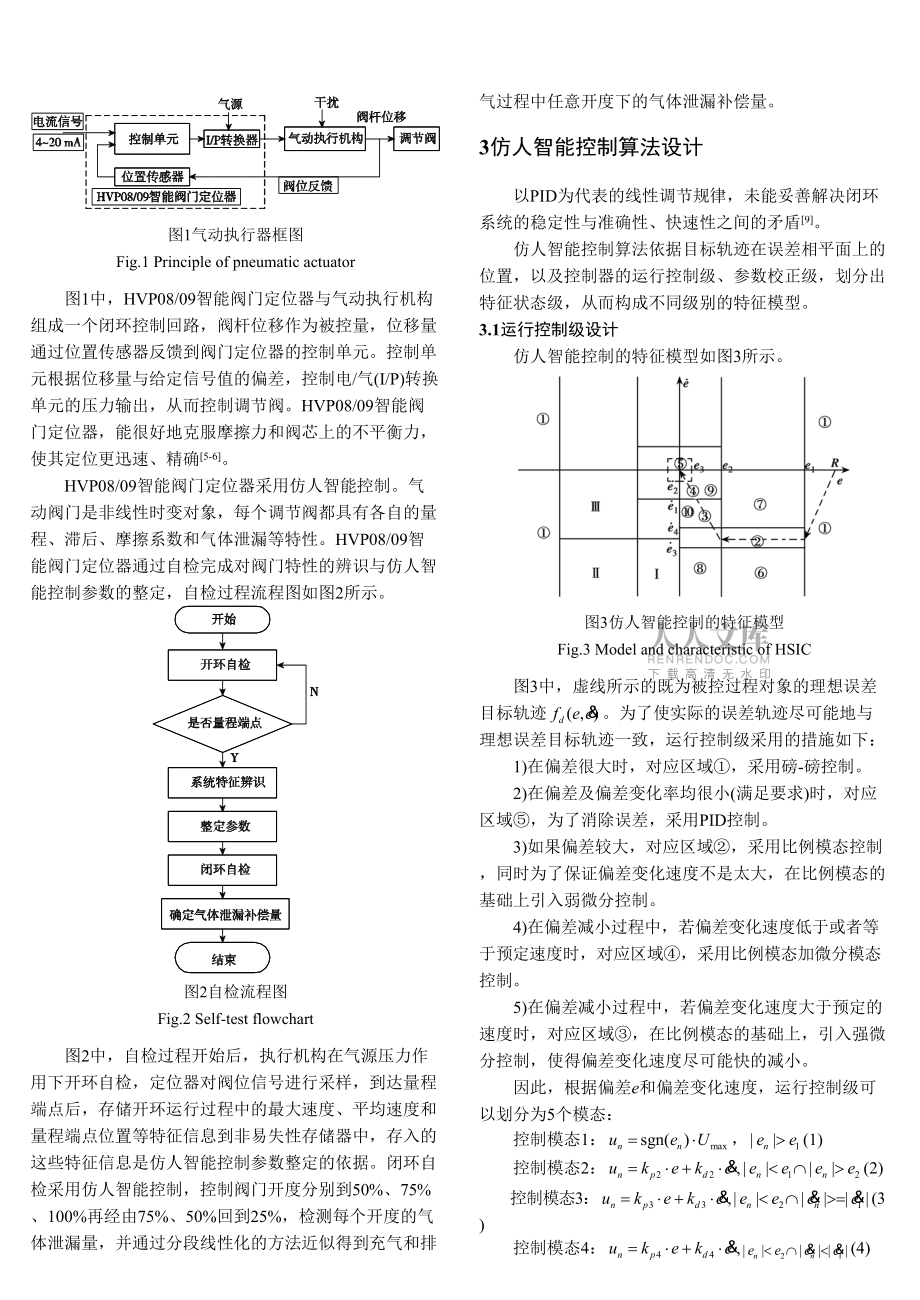
9、流程图Fig.2 Self-test flowchart图2中,自检过程开始后,执行机构在气源压力作用下开环自检,定位器对阀位信号进行采样,到达量程端点后,存储开环运行过程中的最大速度、平均速度和量程端点位置等特征信息到非易失性存储器中,存入的这些特征信息是仿人智能控制参数整定的依据。闭环自检采用仿人智能控制,控制阀门开度分别到50%、75%、100%再经由75%、50%回到25%,检测每个开度的气体泄漏量,并通过分段线性化的方法近似得到充气和排气过程中任意开度下的气体泄漏补偿量。3仿人智能控制算法设计以PID为代表的线性调节规律,未能妥善解决闭环系统的稳定性与准确性、快速性之间的矛盾9。仿人
10、智能控制算法依据目标轨迹在误差相平面上的位置,以及控制器的运行控制级、参数校正级,划分出特征状态级,从而构成不同级别的特征模型。3.1运行控制级设计仿人智能控制的特征模型如图3所示。图3仿人智能控制的特征模型Fig.3 Model and characteristic of HSIC图3中,虚线所示的既为被控过程对象的理想误差目标轨迹。为了使实际的误差轨迹尽可能地与理想误差目标轨迹一致,运行控制级采用的措施如下:1)在偏差很大时,对应区域,采用磅-磅控制。2)在偏差及偏差变化率均很小(满足要求)时,对应区域,为了消除误差,采用PID控制。3)如果偏差较大,对应区域,采用比例模态控制,同时为了保
11、证偏差变化速度不是太大,在比例模态的基础上引入弱微分控制。4)在偏差减小过程中,若偏差变化速度低于或者等于预定速度时,对应区域,采用比例模态加微分模态控制。5)在偏差减小过程中,若偏差变化速度大于预定的速度时,对应区域,在比例模态的基础上,引入强微分控制,使得偏差变化速度尽可能快的减小。因此,根据偏差e和偏差变化速度,运行控制级可以划分为5个模态:控制模态1:,(1)控制模态2:,(2)控制模态3:,(3)控制模态4:,(4)控制模态5:,(5)3.2参数校正级设计理想相轨迹是由阈值决定的,而实际相轨迹是由阈值和参数共同决定的。参数校正级采取的措施如下:1)偏差变化速度超过限制值,对应区域,应
12、减弱比例控制作用,并引入微分作用,形成比例加微分控制模式;2)偏差变化速度低于设定范围,对应区域,增强比例作用;3)偏差已经很小的情况下,如果偏差变化速度仍很大,对应区域,通过参数校正,适当减弱比例作用,引入较强的微分作用,如果仍然不能满足要求,那么引入正反馈,形成很强的比例加微分控制模式;4)偏差变化速度低于此时要求的速度,对应区域,通过参数校正稍加大比例作用;5)偏差已进入稳态要求,变化速度未进入稳态要求,对应区域,通过参数校正稍减弱比例作用;6)出现超调,偏差变化速度仍较大,对应区域,增强微分作用,减弱比例作用;7)出现超调,偏差变化速度及此时偏差均较大时,对应区域,增强微分和比例作用;
13、8)出现超调,偏差较大而偏差变化速度不是很大时,对应区域,增强比例作用,减弱微分作用。4仿真研究重庆川仪自产直行程阀HA1D,额定行程14.3mm,气源压力3.5 kg,量程归一化,经辨识得传递函数为:在MATLAB7.4的SIMULINK仿真环境中,建立仿人智能控制系统,控制器输出的饱和非线性环节取-1,1;模态切换的阈值选取:e1=0.8,e2=0.4,e3=0.2,de1=0.4; de2=0.2;模态1:Umax=1;模态2:kp2=0.8,kd2=0.4;模态3:kp3=0.8,kd3=0.6;模态4:kp4=2,kd4=0.8;模态5:kp5=5,ki5=10,kd5=0.5。为了
14、对比控制效果,选用PID+Smith控制器和最优PID控制器。最优PID目标函数选取ITAE性能指标:(6)PID参数采用单纯形法8整定得:kp=1,ki=0.4,kd=0.5;PID+Smith控制器参数取kp=0.9,ki=0.4,kd=0.5,Smith预估器采用精确数学模型。4.1阶跃响应测试3种控制方法的阶跃响应曲线如图4所示,性能指标见表1。图4跃响应曲线阶Fig.4 Step response curve表1阶跃响应性能指标Table 1 Performance of step response方案调节时间Ts(=2%)超调量(%)ITAE HSIC5.903.6PID+Smit
15、h8.005.0PID由表1可知,仿人智能控制器与PID+Smith控制器、最优PID控制器相比具有较好控制性能,阶跃响应速度快且无超调。4.2鲁棒性测试为了检验控制器的鲁棒性,把控制对象变为,控制器的控制参数保持不变,3种控制方法的阶跃响应曲线如图5所示,性能指标见表2。图5鲁棒性测试响应曲线Fig.5 Robustness test response curve表2鲁棒性测试性能指标Table 2 Performance of robustness test方案调节时间Ts(=2%)超调量(%)ITAEHSICPID+SmithPI
16、D14.519.315.4由表2可知,仿人智能控制器控制器在对象变化后,较之PID+Smith控制器与最优PID控制器依然具有更好的动态特性和稳态特性,具有更强的鲁棒性,更适用于非线性时变系统的控制。5应用研究被控对象为重庆川仪自产的调节阀,其执行机构为HCP-I,公称通径DN200,额定行程75mm,气源压力4kg,定位器死区范围设为0.4%。位置传感器信号经A/D转换通过串口读出,采样时间20ms。经自检,阀门的端点位置为1072和3092,量程为2020。阀门开度在不同的位置滞后时间是不同的。端点位置较大,其它平衡位置较小。控制阀门开度从量程的50%到75%。对比算法采用的是积分分离的P
17、ID控制,仿人智能控制与积分分离PID控制曲线如图6所示。图6阶跃响应曲线Fig.6 Step response curve图6中,积分分离PID控制曲线在2500左右,速度接近为零,这时依赖积分作用增大控制量来克服静摩擦力,故会出现长时间静止或移动一定距离又静止的现象。而仿人智能控制通过切换模态进行参数切换,能够快速进入死区,满足定位要求。有时由于气体泄漏的原因,阀门稳定后又会出现向下滑动的现象,需要再充一部分气才能稳定到目标位置,为此当检测到阀门向下滑动时,要对控制量进行补偿,补偿量是在自检过程中确定的。该阀门在稳定后,有向下滑动的现象,控制阀门开度从量程100%排气到75%,有、无补偿作
18、用的对比曲线如图7所示。图7补偿曲线Fig.7 Compensation curve由图7可知,加入补偿作用能有效减小气体泄漏所造成的不利影响。6结论智能阀门定位器自检过程完成对阀门特征的辨识,在仿人智能控制理论指导下,设计了智能阀门定位器的控制算法。仿真与应用结果表明,该算法具有较好的鲁棒性,采取对气体泄漏补偿的措施,能够有效减小气体泄漏所造成的不利影响。文中所述的分析方法及设计结论对此类工业控制过程的处理有一定的参考意义。参考文献1 尚群立,蒋鹏.智能电气阀门定位器的研制J.仪器仪表学报, 2007,28(4):718-721.SHANG QL, JIANG P. Research on
19、intelligent electro-Pneumatic valve positionerJ. Chinese Journal of Scientific Instrument, 2007,28(4):718-721.2 SOEHARTANTOT, KAUSTARL, SUYANTO. Auto tuning valve positioner on process control training(PCT) base on PCC.IEEE Circuits and Systems, APCCAS Proceedings, 2002(2):353-356.3 WAKUIT. Performa
20、nce improvement of digital positioner for pneumatic control valve with large hysteresisC. Proceedings of the 7th International Symposium on Fluid Control, Measurement and Visualization, 2003, 287:1-10.4 WAKUIT. Hysteresis compensation loaded in digital positioner for pneumatic control valve with tig
21、htened grand packingC. Proceedings of SICE Annual Conference, 2003,6(2):2220-2224.5 庞彦斌,王胜,程炜.基于FF 协议的智能气动阀门定位器开发J.仪器仪表学报, 2001,22(3):491-493.PANG Y B, WANG SH, CHENG W. Development of smart pneumatic valve positioner based on FF protocolJ. Chinese Journal of Scientific Instrument, 2001,22(3):491-49
22、3.6 钟盛辉.关于HVP系列智能阀门定位器的研发J.自动化仪表, 2007,28(9):126-128.ZHONG SH H. Research and development of HVP series smart valve positioner.J. Process Automation Instrumentation, 2007,28(9):126-128.7 李祖枢.仿人智能控制M.国防工业出版社, 2003: 98-314.LIZSH. Human-simulated intelligent controlM.Beijing: National Defense Industry
23、Press,2003:98-314.8 NELDER J A, MEAD R. A simplex method for function minimizationJ.Computer Journal,1965,7:308-313.作者简介吴朋,1983年于合肥工业大学获工学学士学位,2002年于重庆大学获工学硕士学位,2006年于重庆大学获工学博士学位。现为重庆川仪自动化股份有限公司教授级高级工程师,重庆大学兼职教授、博士生导师,中国仪器仪表学会常务理事、智能化仪表及其控制网络分会理事长。主要研究方向为智能化仪表与控制网络。E-mail: wupengWu Peng received BSc fr
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 2026年营养配餐客户分析专项练习题及答案
- 2026年上半年全国英语等级考试(PETS)复习试题及答案高分策略(全新版)第五级(兵团)
- 2026年医院感染试题题库附答案
- 2026年共青团入团考试青春素养测试题库含答案
- 2026年导游政策法规练习题库附答案
- 2025年抗菌药物临床应用与规范管理培训考核试题及答案
- 2026年国家保安员资格考试题库附答案
- 2026年管理沟通考试试题及答案
- 2026年高校教师资格证之高等教育心理学题库及参考答案(培优a卷)
- 2026年《道德与法治》课程标准测试题含答案
- 儿童肺炎支原体肺炎临床特征、治疗及预后的对照回顾与深度剖析
- 2025年上海市中考语文试卷真题(含答案及解析)
- 辅助生殖妇女妊娠管理
- 堤防工程施工规范
- 防排烟系统基础知识课件
- T-CALC 007-2025 重症监护病房成人患者人文关怀规范
- 沪科版九年级物理14-2让电灯发光课件
- 第六届全国农业行业职业技能大赛(农业经理人赛项)理论参考试题库-上(单选题)
- 3-费希尔DVC6000系列定位器的调校
- 代订机票合同
- 高考必备文学常识
评论
0/150
提交评论