



下载本文档
版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、基于连杆机构的双足机器人起立方法分析微计算机信息查看最近90天中添加的最新产品 最新电子元器件资料免费下载 派睿电子TI有奖问答 - 送3D汽车鼠标 IR推出采用焊前金属的汽车级绝缘栅双极晶体管 全球电子连接器生产商samtec 最新断路器保护套 摘要:双足机器人的起立动作是双足机器人步行之前重要的基本准备动作,本文通过连杆结 构分析一种双足机器人的起立方法,主要分析了起立过程的动作规划,分阶段计算出使机器 人稳定不发生倾倒所要满足的各种条件,最后实际验证了这一起立方法分析的正确性。1 引言机器人技术是电子、机械、人工智能等各个领域新技术的结晶,双足机器人的研究作为 机器人学的一个分支,无疑对
2、机器人研究的技术和思想提出了更高的要求。 双足机器人的起立动作是双足机器人的基本动作之一,在双足机器人进行双足步行之 前,首先要保证机器人处于站立状态。而从俯卧到站立的过程就是机器人的自起立的过程, 在这个过程中要保证机器人不发生倾倒,就需要规划机器人的整个动作。在这里我可以通过 将机器人简化为连杆结构。通过平面连杆的相关理论进行分析,对整个动作进行规划。2 连杆模型本文的研究对象是一台至少具有13 关节自由度(不考虑手指的自由度)的双足步行机构, 每条腿各有3 个自由度, 即:踝关节、膝关节、髋关节分别具有一个前向自由度;腰部有一 个转弯自由度;每个肩关节具有二个自由度, 包括前向和侧向度;
3、每个手臂的肘关节具有一 个前向自由度。机器人的起立规划运动,由三个旋转关节和八个前向关节的协调运动来实现, 由于起立动作所涉及的自由度大都集中在侧向的平面内,所以可以用连杆机构来分析机器人 的起立动作,并用D-H 方法建立模型。3 起立过程分析起立过程主要是保证机器人从俯卧状态转换到双足站立的状态,并在起立过程中不发生 倾倒,那就要满足在静态运动时重心保持在机器人的支撑范围内。根据这一基本原理,可以 将起立过程分为三个阶段,如图1 所示,第一个阶段机器人从俯卧状态开始,双腿开始弯曲 同时双臂向前伸直形成跪立状态。第二阶段机器人从跪立状态开始重心不断后移到双脚支撑 范围内形成双脚支撑的下蹲状态。
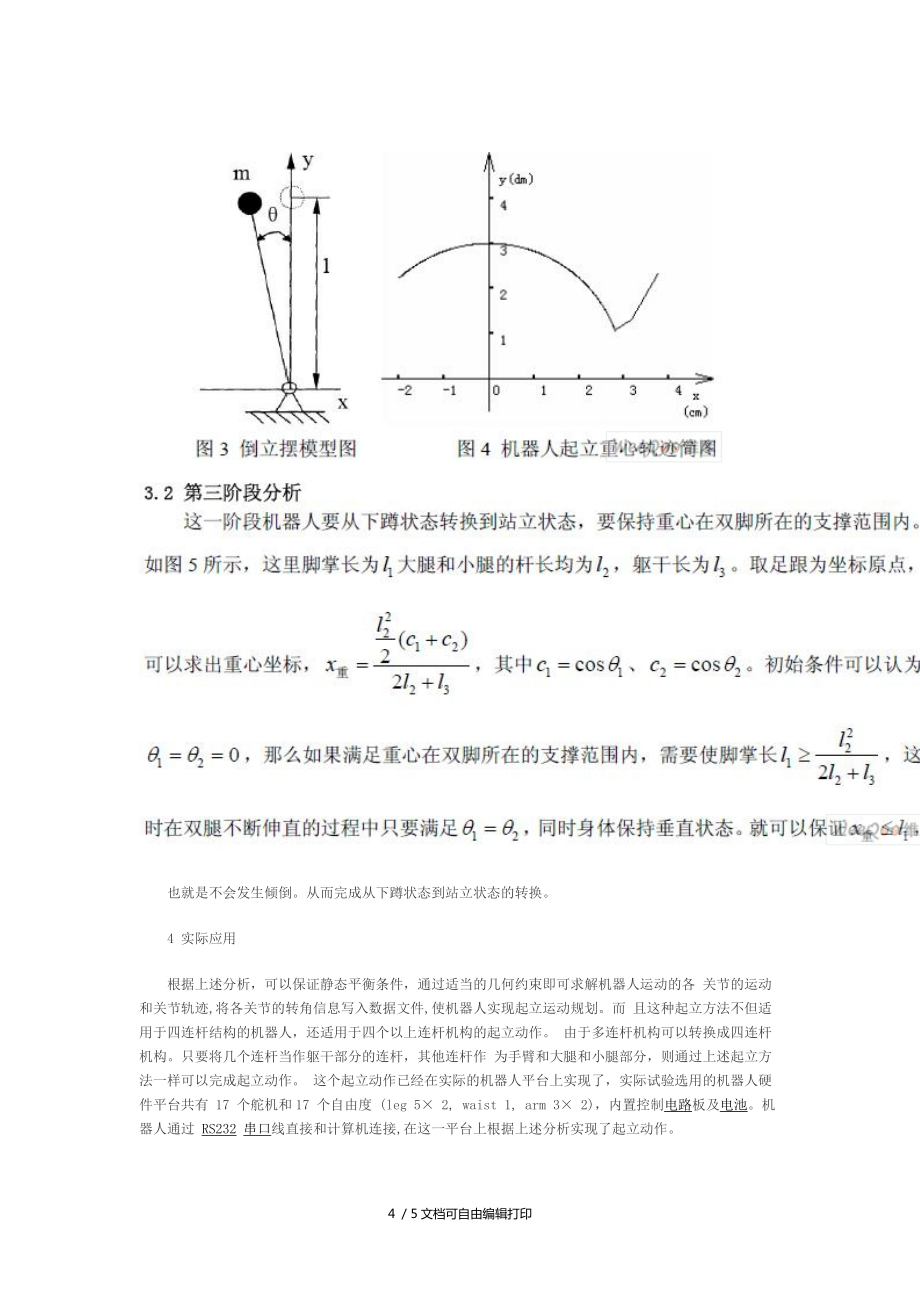
4、第三阶段从下蹲状态开始向上站立,直到双腿伸直形成直 立状态。在三个阶段中,第一个阶段由于在双臂和双膝的支持下,只要保持双臂和双膝动作 一致就不会发生倾倒。而第二三阶段由于重心的不断移动则容易发生倾倒,下面将具体分析。3.1 第二阶段分析在这个阶段,机器人要从跪立状态转换到下蹲状态,这里可以用连杆结构来分析。首先 建立连杆模型,如图2 所示。由于小腿着地所以整体分析手臂、身体、大腿这三个连杆,这里取膝关节所在位置为基 坐标系(即坐标系0)原点,三个连杆长度分别为1、2 、3 ,夹角为1 、2 、 3。根据 Denavit-Hartenberg 法则建立个连杆的坐标系,其齐次变换通式为齐次变换通式
5、描述了坐标系i 相对于坐标系i-1 的位置关系。这样可以求出每个连杆相对于基坐标系的位置关系,假设连杆的质量分布均匀密度相似,则每个连杆的重心位置为连 杆的中点,这样通过齐次变换矩阵,每个连杆的重心在基坐标系上的坐标x1, x2 , x 3可求:也就是不会发生倾倒。从而完成从下蹲状态到站立状态的转换。4 实际应用根据上述分析,可以保证静态平衡条件,通过适当的几何约束即可求解机器人运动的各 关节的运动和关节轨迹,将各关节的转角信息写入数据文件,使机器人实现起立运动规划。而 且这种起立方法不但适用于四连杆结构的机器人,还适用于四个以上连杆机构的起立动作。 由于多连杆机构可以转换成四连杆机构。只要将几个连杆当作躯干部分的连杆,其他连杆作 为手臂和大腿和小腿部分,则通过上述起立方法一样可以完成起立动作。 这个起立动作已经在实际的机器人平台上实现了,实际试验选用的机器人硬件平台共有 17 个舵机和17 个自由度 (leg 5× 2, waist 1, arm 3× 2),内置控制电路板及电池。机器人通过 RS232 串口线直接和计算机连接,在这一平台上根据上述分析实现了起立动作。5 结论本文介绍了一种机器人自起立的方法,并通过连杆结构加以分析,总结出了实现稳定的 不发生倾倒的起立动动作时,机器人所要满足的基本条件。通过适当
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 2024年陪诊师考试复习的误区与试题及答案
- 投资咨询工程师考生经验分享试题及答案
- 2024年陪诊师考试高效提升的方法与试题及答案
- 大学语文冲突解析试题及答案
- 备战育婴师考试的试题及答案2024
- 家庭教育指导师考试中的心理调适试题及答案
- 2024国际物流师考试复习手册及试题及答案
- 黑龙江省佳木斯市富锦市2025届五下数学期末达标检测试题含答案
- 黑龙江省双鸭山市尖山区第一中学2024-2025学年高中毕业班第三次教学质量监测文综试题含解析
- 黑龙江省哈尔滨市哈工大附中2025届初三下学期第一次摸拟试化学试题含解析
- 新人教版高中数学《等比数列》课件教学课件1
- 水电站110kV变电站接地电阻计算书
- 2024CSCO结直肠癌诊疗指南解读
- 【相宜本草护肤品的营销策划设计3200字(论文)】
- 车辆租借免责协议
- 医学检验技术岗位分析报告总结
- 影像进修汇报
- 2023年公文写作考试题库(含答案)
- 山东省市烟台市牟平区2023-2024学年(五四学制)七年级下学期期中考试语文试题
- 市文创综合项目专项审计综合报告参考模版
- 2024年唐山市2024届高三二模英语试卷(含答案)
评论
0/150
提交评论