



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
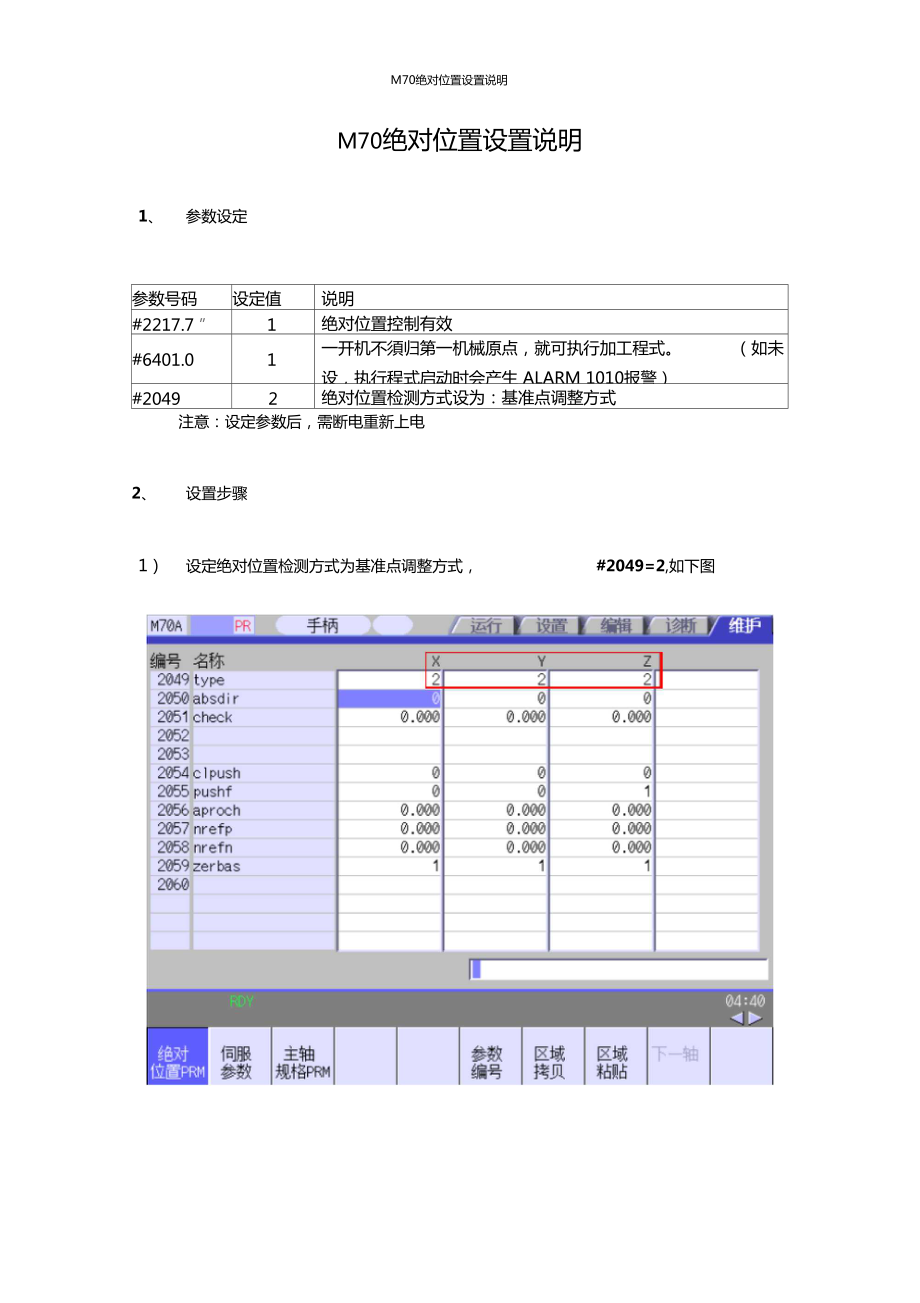
1、M70绝对位置设置说明M70绝对位置设置说明1、参数设定参数号码设定值说明#2217.7 ”1绝对位置控制有效#6401.01一开机不須归第一机械原点,就可执行加工程式。(如未设,执行程式启动时会产生 ALARM 1010报警)#20492绝对位置检测方式设为:基准点调整方式注意:设定参数后,需断电重新上电2、设置步骤1)设定绝对位置检测方式为基准点调整方式,#2049=2,如下图2) 伺服与NC均断电,重新上电后系统出现 Z70报警,如下图M70A手柄0.0000.000©.000自动Ml " f件 G640.0000.0000.000机X¥ZWZM 01 N
2、0B 00NBG58G90G01X0Y0Z0F100;ZM03S2000;X-500.Y-4W.Z-400.;M99;G00Z70绝对也菱基准位置I,殳正未元成创:们妙3编辑轨迹检查Cnt exp补正量坐标系再搜索Cnt set3) 按MAINTE维护一密码输入一输入密码一绝对位置一进入以下界面M70A手柄/运行设置编辑确定方法(类型:未按下)1 在抽选中输入显示的轴名,或者选择下一个轴/ 上一个轴O2 .机械操作开关模式的选择©手柄】或者【手柄轴或者【JOG3-把绝对位置设定为仁4.移动到机械基准位置,调整基 准忒5二基准点设定为仁6 .把轴移动到最终逬入的方向和収方向, 入状态】
3、是完了】时确定绝对位置。8-陵定庫点1 o9再启动*K呈状态 机械端 编号机械位置绝对位置设主 基准点 原点absdircheck055253W5556570 0 0 0 0 02 2 2 2 2 2000.0000,000c1 push pushf aproch nrefpZ70绝对位證基准位置设定未完成创:“上一轴下一轴4) 将各轴移动到欲设原点位置,然后再进行绝对位置设定,下面是对Z轴绝对位置的设定,下图为设定前的信息M70A手柄确定方i去(类型:未按下)1 .在轴选中输入显示的轴名,或者选择下一个轴/ 上一个轴o 乙机械操作开关樓武的选择。手柄或者手柄轴或者JOG3肥绝对位置设定为仁
4、儿移动到机樋基准位置,调整基准点。5基准点设定为仁6 把轴移动到最终进入的方向和反方向7 状态是完了时确定绝对位置* 氏设定imio9 .NC再官动°雄I锚绝对位置设定基准点原虫 absdi r checkZ 不按下 于正确 0.0005253545556570 0 0 0 0 02 2 2 2 2 2clpush pushf aproch nrefp1.00000004:5©上一轴下一轴轴选择Z70绝对I立置恭圭位置设定未完成其中:“Z”表示目前是Z轴设定界面,“不正确”表示原点调 整尚未完成。下面为设定步骤:A、把绝对位置设定设为1 (注意在急停状态下不能设置),如下上
5、一轴下一轴RDY轴选择M70A手柄确定方法(类型:未按下)匚在轴选拝】中输入显示的轴名,或者选择下一个轴/ 上一个轴O2 机械操作开关模式的选择©手柄】或者【手柄轴或者【JOG3-把绝对位置设定为仁4. 移动到机械基准位置,调整基 准忒5. 基准点设定为仁6肥轴移动到最终逬入的方向和反方向,7状态】是完了】时确定绝对位舐8-i麦定療点1 o9再启动*/ /I口仃W端位 型态械械 类状机机号编12205020512052原点 absdi r checkc1 push pushf aproch2057 nrefpZ 不按下 基准调正 0.000 0,0001绝对位胃基准位證设定未完成加:
6、WM70A手柄/运行设置编辑诊瑕定方法(类型:未撞下)在轴选I卿中箍入显示的轴喀, 或者选择下一个轴/ 上一个轴O2 机械操作开关模式的选择。手柄或者手柄轴或者JOG乱把绝对位萱设定为仁4.移动到机械基准位置,调整基5基唯点设定为仁6肥轴移动到最终进入的方向和反方向°7 -状态是【完了时确忌色对位匱.8*谡定療点1 o9心再启动D叽1? 机械位置1基准点不按下 基准直复位 6.003 0.000100.0002054 cl push02055 pushf12056 aproch0.0002057 nrefp0,00®海总absdir checkz20502051205220
7、5304:50上一轴下一轴Z70绝对位置基准位置设定丰完成轴选择B、把基准点设为1,如下图C、设定原点值(可默认为1)并移动轴,使其机械位置等于机械端的值,如下图M70A手柄r娠iIT细I确定方法(类型:未按下)1 在轴选中输入显示的轴名,或者选择下一/ 上一个轴O2.机械操作开关模式的选择。手柄】或者手或者【JOG3 .把绝对位置设定为仁 氛移动到机械基准位置,调整基5二基准点设定为仁b.把轴移旷到最终进入旳方向和反方向®7扶态是完了时确定绝对位聲8般定原点1 oq再启动*编号0Z绝对位置设定LJ®点6.000absdir0check0.000c1 push0pushf1aproch0.000nrefp0.00004:5051K2®3545556570 0 0 0 0 0 02 2 2 2 2
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 医疗仪器使用和维护手册
- 医药研发项目管理方案
- 安全文明施工措施费怎么算
- 怀化沅陵垃圾焚烧发电项目
- 安全技术措施施工方案
- 健康产业在线健康咨询服务平台开发与运营策略
- 科技创新经济发展形势
- 医疗健康大数据平台数据共享手册
- 登高安全作业施工方案
- 医疗机构疾病预防控制预案
- 特殊作业安全管理监护人专项培训课件
- 农行竞聘高级专员述职报告范本
- 2024届全国新高考英语复习-读后续写微写作
- 陕西省咸阳市实验中学高一下学期第一次月考物理试题(原卷版)
- 上下级权责关系与沟通管理制度
- 眼部疼痛的病理生理机制
- 部编版道德与法治二年级下册第二单元备课
- 保证金合同范文(2024版)
- JBT 14716-2023 增材制造装备 面曝光光固化三维打印机 (正式版)
- 人教版(一年级起点)一年级至六年级的英语词汇
- 项目延期申请报告范文
评论
0/150
提交评论