

版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
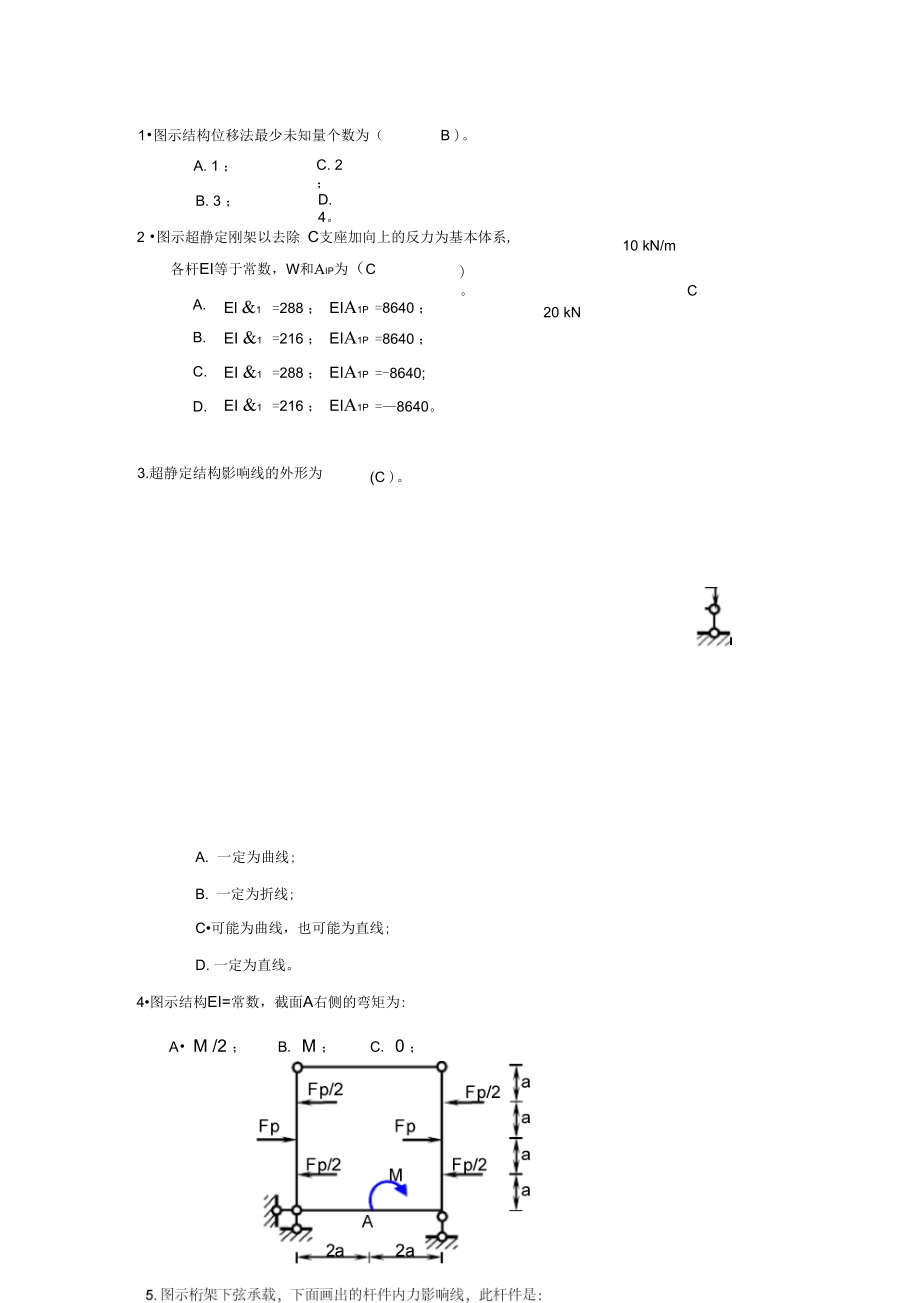
1、1图示结构位移法最少未知量个数为(B )。A. 1 ;C. 2 ;B. 3 ;D. 4。2 图示超静定刚架以去除 C支座加向上的反力为基本体系,10 kN/m)。A.El &1=288 ; EIA1P=8640 ;B.EI &1=216 ; EIA1P=8640 ;C.EI &1=288 ; EIA1P=-8640;D.EI &1=216 ; EIA1P=8640。各杆EI等于常数,W和Aip为(C20 kN3.超静定结构影响线的外形为(C )。CA M /2 ;B. M ;C. 0 ;A. 一定为曲线;B. 一定为折线;C可能为曲线,也可能为直线;D. 一定为
2、直线。4图示结构EI=常数,截面A右侧的弯矩为:D. M/(2EI)。A .ch;B.ci;C.dj; D.cj.Fp=16.图a结构的最后弯矩图为:(A)7.A.图 b;B.图 c;C.图 d;D.都不对。(a)疋:(b)(c)(d)用图乘法求位移的必要条件之一旦A. 单位荷载下的弯矩图为一直线;B. 结构可分为等截面直杆段;C所有杆件EI为常数且相同;D.结构必须是静定的。8.图示梁A点的竖向位移为(向下为正)33A. FpI /(24EI);B. FpI /(!6 EI);C. 5Fp|3/(96 EI);D. 5 FpI3/(48 EI).Fp1/2El'J9. 连续梁和 M图
3、如图所示,则支座 B的竖向反力FBy是:(D )20 kNA. 1.21( 0Q 。2 kN/mL3bc10. 在位移法中,将铰接端的角位移,滑动支撑端的线位移作为基本未知量:(C )A, 绝对不可;B.一定条件下可以;D.必须。C. 可以,但不必;11. 图示体系为:(C )A. 几何不变无多余约束B.几何不变有多余约束D.几何瞬变12. 静定结构在温度变化作用下(B)A 不产生变形也不产生内力;B. 产生变形但不产生内力;C. 即产生变形也产生内力;D. 产生内力但不产生变形。13. 图示带拉杆的三铰拱,顶铰C约束的水平分量为(D)A.10 kNB.15 kNC.20 kND.30 kN1
4、0 kN/mC. 几何常变14.图示结构中,El =常数,在荷载作用下结点C的转角为(A)A.FpF/3 El(逆时针)Fp1C一B.FpI2/3 EI(顺时针)BC.0D.2FpI2/3 EI(逆时针)16.悬臂梁支座截面弯矩影响线的形状应该是(B)II15.图示结构不计轴向变形,用位移法求解时,基本未知1(C)A.两个线位移;FpB一个线位移和两个角位移;B -11CC两个角位移;El0=/ El= CEl= CD.一个角位移和两个线位移。A瓷D17. 两个刚片由三根链杆相联所组成的体系A. 几何不变体系C.几何瞬变体系18. 三铰拱在竖向荷载作用下,当拱高A. 变小C.不变D )B.几何
5、常变体系D.不变、常变、瞬变都有可能f变小时,水平推力 H ( B )B.变大D.变小、变大、不变都有可能D )B.截面抗弯刚度D.远端约束形式19. 在力矩分配法中,等截面直杆的力矩传递系数决定于杆件(A. 所受荷载C.长度A. iB. 2iC. 3i20. 图示单跨超静定梁,线刚度为i,当A端发生单位转角时,杆端变矩Mab为(A )< rID. 4i21. 已知图示结构D点的挠度为 d,当BC杆刚度增大为2EI2时,D点的挠度为( B )A.0.5 AdaIdb/B. Ad岛姿C. 1.5 AdD. 2 Ad22.图示结构的超静定次数是( B )A. 3B. 4C. 5D. 623.
6、图示结构,A.0B.Ml12EIC.Ml6EID.Ml3EIA、B两截面相对转角0 ab的值等于(A )24. 图示结构用位移法计算时,独立结点位移未知量的数目是(D )A. 4B. 5C. 6D. 725. 图示超静定结构分别承受荷截作用(图a)及支座移动作用(图 b ),用力法求解时,若选取同一基本结构(图 c),则在两组力法方程各项系数中不相同的是(A. 主系数B. 副系数C. 自由项(a)D. 右端项26. 图示排架,CD柱的柱端弯矩 Mcd的值为( C )A. 1Pl4B EA- D EA-1B. PIEl2EIEIC. 1Pl2D. Pl27. 图示体系为(A )A 无多余约束的几
7、何不变体系B 有多余约束的几何不变体系C 瞬变体系D 常变体系28. 联结三个刚片的铰结点,相当于约束数目是(C )B. 3个C 4个D 5个29. 图示结构,若将均布荷载q用其合力ql代替(如虚线所示),则所产生的反力( C )A 都发生变化Ft t + + B 都不发生变化C 水平反力发生变化,竖向反力不变、D 竖向反力发生变化,水平反力不变4J*30.图示带拉杆的三铰拱,杆AB中的轴力为(D )A 10kNB 15kNC 20kND 30kN31. 在图示结构中,杆 a的轴力(以拉力为正)为( B )A3PB. 2PC. 3PD . 4P32. 图示结构,求A、B两截面的相对转角时,所设
8、相应单位荷载应为(A 一个作用在截面A的单位集中力偶B .一个作用在截面 B的单位集中力偶C .分别在截面A、B各作用一个单位集中力偶,方向相同D 分别在截面 A、B各作用一个单位集中力偶,方向相反33. 图示桁架的超静定次数是(A. 2B. 3C. 434. 图示结构,位移法基本方程中的自由项(荷载项)Rip (顺时针为正)等于( B )A. 16kN m3kN/m4mB. 0C. 16 kN m1C等D . 32 kN m35. 图(a)所示超静定结构,选择图(b )所示力法基本体系,力法方程中的自由项厶于(A)A.-l AB.12l AC.l AD .2 l A影响线在固定端受拉为正)(
9、BB的纵)36. 图示悬臂梁,截面 C的弯距 标(竖距)等于(弯距以下侧1A. -2B. 0C.1_237. 将图中铰A撤去,相当于撤去的约束数目为(A. 2B. 4C. 6D. 838. 图示体系是( C )A. 无多余约束的几何不变体系B. 有多余约束的几何不变体系C. 常变体系D. 瞬变体系39. 图(a)、(b)所示两结构截面 D的弯矩分别记为Mdi、M D2,则二者的关系是( A )A. M D1 <M D2B. M Dl=M D2C. M Dl >M D2D. 不确定,与fi、f2的比值有关40. 用力法计算图示结构,在选择基本结构时,A. 杆1B. 杆2C. 杆3D.
10、 杆4须预先给定各杆刚度的结构是(D )41. 求图示四种结构由于外因引起的内力时,A. 图(a)B. 图(b)C. 图(c)D. 图(d)42. 图示排架在反对称荷载作用下,杆AB的轴力为( C )A. -2PB. -PC. 0D. P43. 图示结构,支座 A截面的弯矩值为( A ).1 2A. q|81 2B. -ql26C. - ql241 2D. ql244. 图示结构,截面 A的弯矩值为(A.EIlB.2EIC.4EID.6EI45. 图示结构用位移法计算时,基本未知量的数目是(C )A. 2B. 3C. 4D. 546. 图示结构,Mba等于(C)1A. Pa6B. - Pa31
11、C. -Pa22D. Pa347. 图示体系的几何组成为(D)A常变体系B瞬变体系C无多余约束的几何不变体系D有多余约束的几何不变体系48. 对于一个静定结构,下列说法错误的有哪些(D)A 只有当荷载作用于结构时,才会产生内力B 环境温度的变化,不会产生内力C杆件截面尺寸及截面形状的任意改变均不会引起内力改变D 制造误差与支座沉降可能使得结构形状发生变化,因此可能产生内力49. 图示结构,弯矩图形状正确的是(D )50. 图示桁架结构1杆轴力一定为(D)A拉力B压力零D需要给出内部三个铰的位置才能确定具体受力性质卜51. 悬臂梁两种状态的弯矩图如图所示,图乘结果是(C)332FpIB 2FpI
12、C 2FpIFpI43EI52. 图示结构,用力法求解时最少未知个数为( A )A 2B 3C 4D 53EI3EIEI 2EIEIz/z53. 在温度改变的影响下,静定结构将:(D)A有内力、有位移 C无内力、无位移B有内力,无位移 D无内力、有位移54. 下列说法正确的是:(C)A 单位荷载法计算位移的单位荷载根据计算方便进行假设;B 虚功中的位移状态是不能进行虚设的;C 虚功原理包括平衡条件和几何条件(位移协调条件)D 利用一个假定的虚拟单位力状态可能求出多个位移。55. 位移计算的图乘法可用于的结构为:(D)A 曲梁(曲杆)结构与变截面梁B 拱结构C 任意平面杆件结构D 由等截面直杆组
13、成的梁与刚架结构57. 图示结构Nde(拉)为(B )B. 80kN ;D. 64kN 。A. 70kN ;C. 75kN ;10kN/m4m1m58. 图示桁架1,2杆内力为(A N1 > 0, N2 > 0D )B N1 < 0, N2 < 0C. N1 = - N 26m6mD. N1 = N 2 = 059. 图示体系的几何组成为( D )A .几何不变,无多余联系B .几何不变,有多余联系D .常变C .瞬变;60. 图示体系为(A )A .几何不变无多余约束B. 几何不变有多余约束D .几何瞬变b为力法基本体系,则建立力法典型方程的位移条件为10,2Ci ;
14、(a)(b)1 0, 2 0 ;62. 图a桁架,力法基本结构如图b,力法典型方程中的系数 11为(C )A . 3.4141/EA ;C. 48281 / EA ;B .4.8281 / EA ;D . 2.01/EA 。(b)B )。A. a 和 eB. a 和 bC. a 和 cD. c 和 e63. 图示体系有3个多余约束,为保证其几何不变,哪两根链杆式不能同时去掉的A端加入(B )。64. 欲使图示体系成为无多与约束的几何不变体系,则需要A.固定铰支座B.固定支座C.滑动铰支座定向支座ij65. 图示体系的几何组成为(D)A.几何不变,无多余约束;C. 瞬变体系;B. 几何不变,有多余约束;D. 常变体系。C.瞬变体系;B.几何不变,有多余约束;D.常变体系。C )。67.位移法中,将铰接端的角位移、滑动支承端的线位移作为基本未知量(A.绝对不可C. 可以,但不必
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 高等学校教师资格考试工作实施细则(试 行)
- 2025-2030年金属电镀活动铅笔项目商业计划书
- 初中语文文学研究方法题试题及答案
- 2025-2030年通信专用在线UPS项目投资价值分析报告001
- 马工学管理中的决策支持系统试题与答案
- 【初中生物】尿的形成与排出 教学设计-2024-2025学年北师大版生物七年级下册
- 2025-2030年车灯模型项目商业计划书
- 叙述技巧与结构试题及答案
- 2025-2030年警告灯闪光器项目商业计划书
- 2025-2030年西洋铜雕项目投资价值分析报告
- 政治-山东省青岛市2025年高三年级第一次适应性检测(青岛一模)试题和答案
- 城市交通智能管理系统开发协议
- 反恐怖测试题及答案
- 2025北京怀柔区属企业招聘管培生15人笔试参考题库附带答案详解
- JT-T-795-2011事故汽车修复技术规范
- (高清版)TDT 1063-2021 国土空间规划城市体检评估规程
- 个人借条电子版模板
- 部编版八年级历史(下)全册教案
- 泌尿外科手术配合-ppt课件
- YSJ 007-1990 有色金属选矿厂 试验室、化验室及技术检查站工艺设计标准(试行)(附条文说明)
- 丽声英语百科分级读物第一级Legs课件
评论
0/150
提交评论